Область техники, к которой относится изобретение
Изобретение относится к области радиоэлектроники и может быть использовано в системах мониторинга состояния объектов с целью предупреждения аварийных ситуаций при контроле физических величин, в частности температуры.
Уровень техники
Из уровня техники известен датчик на ПАВ-линии задержки, способ и система, повышающие точность обнаружения (см. [1] CN102313614, МПК G01K 11/22, опубл. 11.01.2012), согласно способу, определяют соответствие задержки и температуры; определяют величину приращения задержки в зависимости от изменения температуры; определяют соответствие между разностью фаз в зависимости от приращения температуры. Таким образом, измерение температуры определяют по количеству циклов фазы между первым и третьим рефлекторами, причем первые два рефлектора служат для калибровки и устраняют проблему фазовой неоднозначности. Считывающее устройство принимает радиосигнал отклика датчика и производит его обработку.
Такой датчик имеет схожие конструктивные признаки в части топологии с заявляемым изобретением, однако в условиях низкого соотношения сигнал-шум не обеспечивает необходимой стабильности показаний датчика. В данном аналоге проблема коллизии не рассматривается.
Устранить коллизии предлагается в многоцелевом способе антиколлизии датчиков физических величин на ПАВ-линиях задержки (см. [1] CN103471631, МПК G01D5/48, опубл. 25.12.2013), в котором проблему коллизии решают посредством разделения сигналов датчиков во времени. В соответствии со способом, на поверхности пьезоэлектрической подложки каждого датчика размещают не менее трех рефлекторов, первый рефлектор – τ1, второй рефлектор – τ2, третий рефлектор – τ3 так, что рефлекторы различных датчиков смещены на различное расстояние относительно ВШП. Размещение рефлекторов датчиков происходит в следующих последовательностях. Первая последовательность расположения рефлекторов на пьезоэлектрических подложках датчиков: первый рефлектор и второй рефлектор первого датчика, первый рефлектор и второй рефлектор второго датчика, …, первый рефлектор и второй рефлектор N-го датчика, затем третий рефлектор первого датчика, третий рефлектор второго датчика, …, третий рефлектор N-го датчика. Вторая последовательность расположения рефлекторов на подложках датчиков: первый рефлектор первого датчика, первый рефлектор второго датчика, …, первый рефлектор N-го датчика, второй рефлектор и третий рефлектор первого датчика, второй рефлектор и третий рефлектор второго датчика, …, второй рефлектор и третий рефлектор N-го датчика.
В данном аналоге решается проблема фазовой неоднозначности и используется ограниченное количество датчиков. Однако данная топология (конструкция) датчиков, где τ1 и τ2, по положению которых производят калибровку, расположены на меньшем друг от друга расстоянии, чем совместно к τ3, который, в свою очередь, обеспечивает требуемую чувствительность датчика, не обеспечивает стабильность показаний датчика, поскольку разность фаз между калибровочными рефлекторами во всем диапазоне изменения контролируемой физической величины составляет более 2π.
Наиболее близким к заявляемому изобретению является способ устранения коллизии в наборе датчиков и устройство для его реализации (см. [3] патент РФ 2585911, МПК G01D 5/48, опубл. 10.06.2016). В этом способе устранения коллизии в наборе датчиков, согласно которому посредством разделения сигналов откликов по времени формируют набор из N датчиков на ПАВ-линиях задержки, согласно изобретению рефлекторы датчиков располагают на пьезоэлектрических подложках в следующем порядке: первый рефлектор первого датчика, первый рефлектор второго датчика, …, первый рефлектор N-го датчика, затем второй рефлектор первого датчика, второй рефлектор второго датчика, …, второй рефлектор N-го датчика, третий рефлектор первого датчика, третий рефлектор второго датчика, …, третий рефлектор N-го датчика, проводят опрос датчиков, принимают сигналы откликов датчиков и проводят их обработку, при этом последовательно для каждого датчика определяют время задержки сигнала между первым и третьим рефлекторами, определяют разность фаз для виртуального времени задержки, разность фаз для времени задержки между первым и вторым рефлекторами и разность фаз между первым и третьим рефлекторами, по которой определяют значение контролируемой физической величины, полученные значения передают на устройство сбора данных. Устройство для реализации способа, выполненное в виде датчика на ПАВ-линии задержки, содержащей пьезоэлектрическую подложку, на поверхности которой нанесены встречно-штыревой преобразователь и не менее трех рефлекторов, смещенных на различное расстояние относительно встречно-штыревого преобразователя, отличается тем, что первый рефлектор имеет наименьшее время задержки, второй рефлектор располагается в средней части поверхности пьезоэлектрической подложки, третий рефлектор расположен на конце пьезоэлектрической подложки, таким образом, что их взаимное расположение определяет виртуальное время задержки, для которого приращение фазы составляет не более 2π во всем диапазоне изменения контролируемой физической величины.
Недостатком прототипа, а также и остальных аналогов, является необходимость использовать в качестве ПАВ-отражателей отражатель с малым коэффициентом отражения. Это необходимо для того чтобы ПАВ незначительно ослаблялись при прохождении предыдущих отражателей, а также для того, чтобы взаимные переотражения между отражателями были бы много меньше первичных отражения ПАВ от отражателей. Тогда этими переотражениями можно будет пренебречь. В этом случае сигнал, отраженный от датчика получается много меньший, чем падающий на датчик, т.е. процесс отражения происходит с большими потерями (30 и более дБ), что может понижать точность измерения температуры при наличии помех.
Еще одним недостатком данного изобретения является то, что в измеряемые задержки входят задержки сигнала, которые он проходит от считывателя до датчика. Если это происходит в пределах одного датчика, эта задержка взаимно вычитается при определении задержек ПАВ между отражателями. Но если сравниваются задержки в разных датчиках, для которых расстояние между датчиком и считывателем разные, то это может привести к значительным ошибкам. Так, например, при разности расстояний в 3 м между считывателем и датчиками задержка сигнала составит 10 нс, что сравнимо с изменением задержки из-за разных температур на этих датчиках, а значит не учет этого расстояния может сказаться на точность измерения температуры.
Сущность изобретения
Задачей изобретения является создание датчика, лишенного недостатков аналогов.
Техническим результатом является уменьшение потерь при отражении ПАВ от датчика, повышение точности определения температуры, а также устранение влияния расстояния между датчиком и считывателем на точность измерения температуры.
Поставленная задача решается, а технический результат достигается за счет способа беспроводного мониторинга температуры на основе пассивных линий задержки (ЛЗ) на поверхностных акустических волнах (ПАВ) с функцией антиколлизии, включающего формирование набора из n датчиков, где n – число датчиков, на ПАВ-линиях задержки посредством частотного разделения сигналов, проведение опроса датчиков, принятие сигналов откликов датчиков и проведение их обработки, при этом последовательно для каждого датчика определяют время задержки сигнала от датчика до опросного устройства, при этом датчики располагают в разных местах объекта мониторинга, по изрезанности амплитудно-частотной характеристики (АЧХ) параметра S11i антенны считывателя, который измеряют в опросном устройстве, определяют задержку ПАВ между приемо-передающим и отражательным ВШП с учетом времени распространения опросного сигнала от опросного устройства до n–го датчика ( i-той пары ЛЗ), как τ1i=1/Δf1i, τ2i=1/Δf2i, где Δf1i – расстояние между ближайшими большим и малым максимумами АЧХ параметра S11i, а Δf2i – расстояние между большими максимумами АЧХ параметра S11i, для i – той пары ЛЗ, вычисляют задержку между отражательными ВШП пары ЛЗ датчика как  , затем сравнивают
, затем сравнивают  различных пар ЛЗ между собой и с
различных пар ЛЗ между собой и с  – задержкой, полученной для i-й пары ЛЗ при известной температуре
– задержкой, полученной для i-й пары ЛЗ при известной температуре  , по разности
, по разности  и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:
и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:  , где α – ТКЗ.
, где α – ТКЗ.
Также задача решается, а технический результат достигается за счет устройства беспроводного мониторинга температуры на основе пассивных линий задержки (ЛЗ) на поверхностных акустических волнах (ПАВ) с функцией антиколлизии, содержащего опросное устройство с приемо-передающей антенной и вычислительным устройством, а также набор датчиков из линий задержки на ПАВ, при этом каждый датчик содержит пару ЛЗ на ПАВ, а каждая ЛЗ на ПАВ в паре, являющаяся каналом, состоит из герметичного корпуса, содержащего пьезоэлектрический звукопровод на поверхности которого расположены приемо-передающий и отражательный встречно-штыревой преобразователи (ВШП), на торцах пьезоэлектрического звукопровода нанесены акустопоглотители, к приемо-передающему ВШП подсоединена, через выводы в корпусе, приемо-передающая антенна, причем приемо-передающий и отражательный ВШП в каждой паре ЛЗ одинаковые секционированные однонаправленные ВШП с одним и тем же числом однонаправленных секций, но с разным периодом их расположения в паре, минимальное число секций в каждом из этих ВШП равно 

Краткое описание чертежей
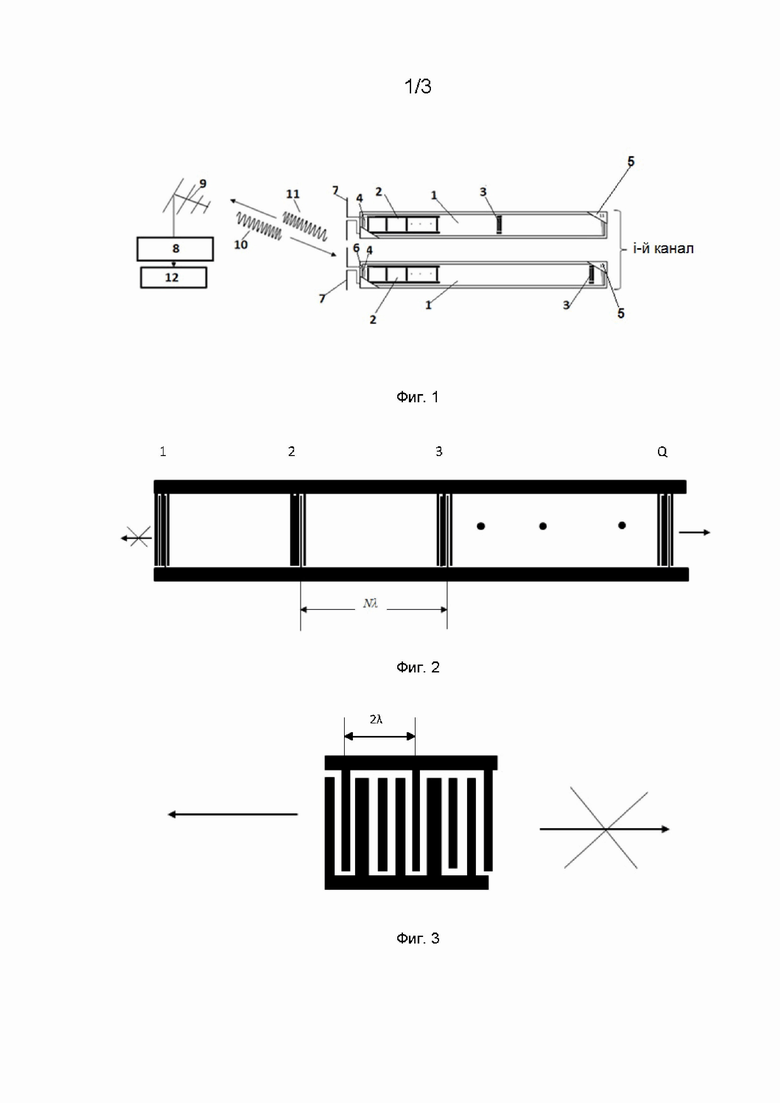
На Фиг. 1 показана конструкция датчика температуры.
На Фиг. 2 подробно показан приемо-передающий ВШП изображенный на Фиг. 1.
На Фиг. 3 подробно показан отражательный ВШП изображенный на Фиг. 1.
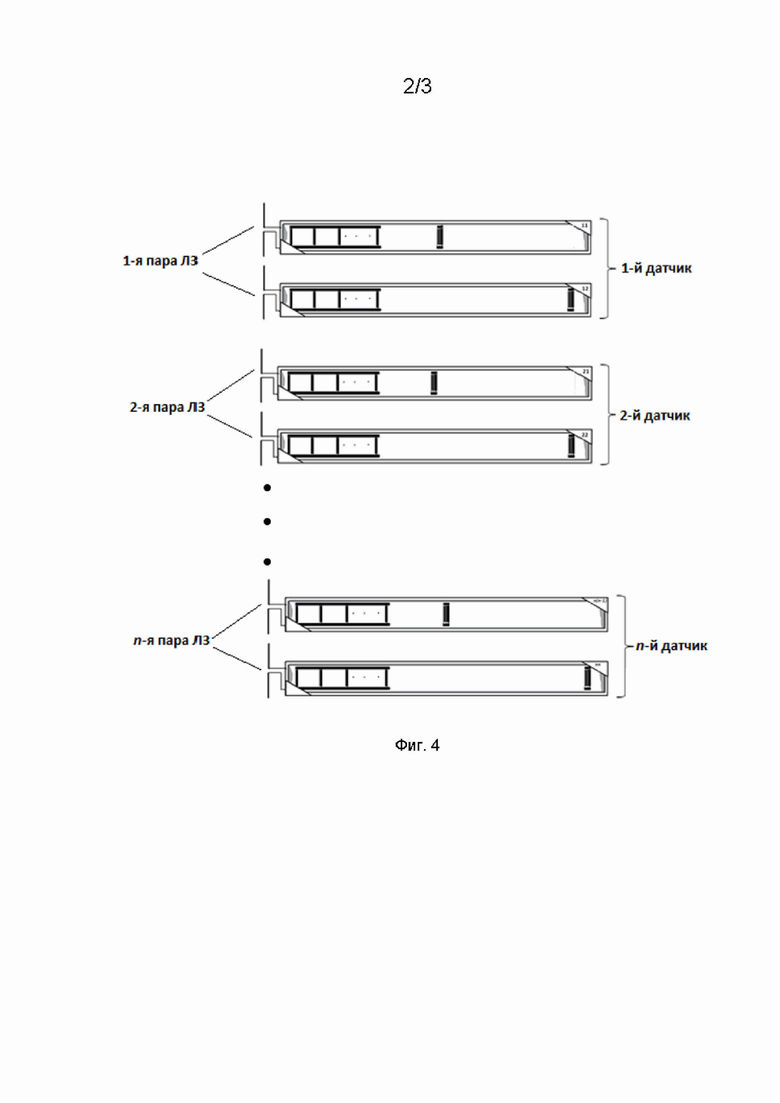
На Фиг. 4 показаны пары линии задержки (ЛЗ) на ПАВ (датчики с функцией антиколлизии).
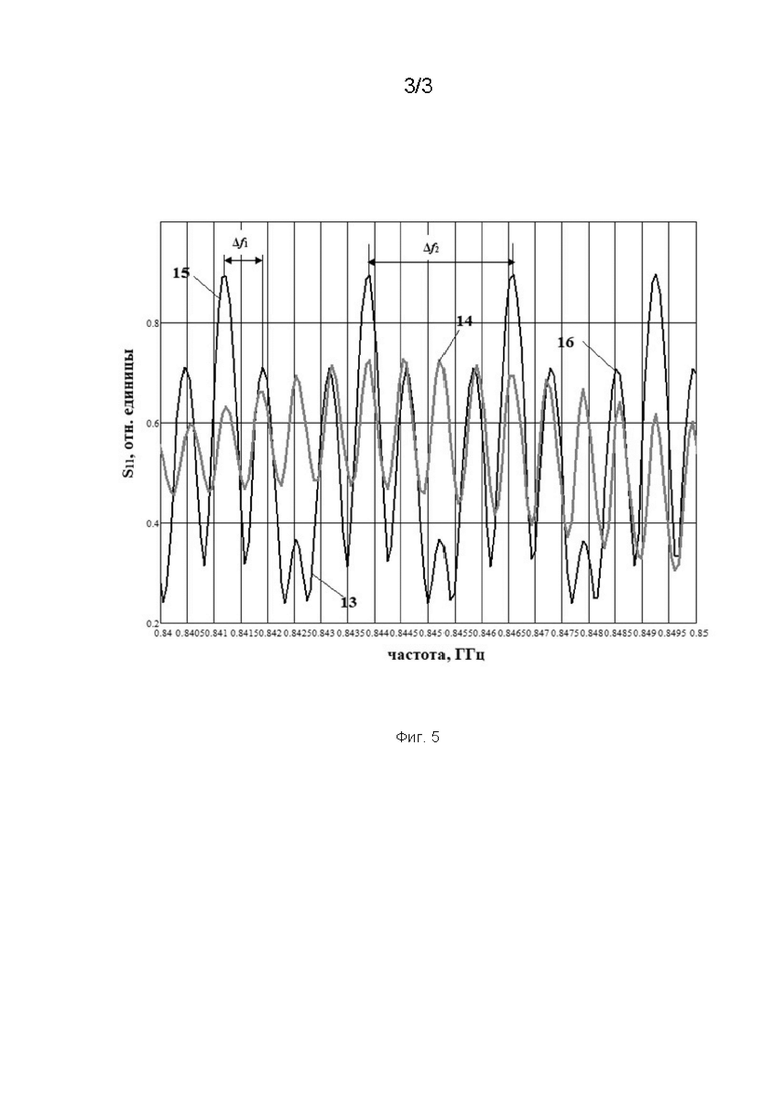
На Фиг. 5 показана частотная характеристика параметра S11i, для i – того датчика.
На фигурах обозначены следующие позиции:
1 – пьезоэлектрический звукопровод, 2 – приемо-передающий ВШП, 3 – отражательный ВШП, 4 – акустопоглотитель, 5 – корпус, 6 – вывод в корпусе, 7 – приемо-передающая антенна, 8 – опросное устройство. 9 – приемо-передающая антенна опросного устройства,10 – считывающий импульс, 11 – импульс, отраженный от ЛЗ, 12 – вычислительное устройство, 13 - частотная характеристика параметра S11 для датчика, 14 - частотная характеристика параметра S11 для одной ЛЗ из пары, в которой расстояние между приемо-передающим и отражательным ВШП наибольшее, 15 – большой максимум, 16 – малый максимум.
Осуществление изобретения
На фиг. 1 показана конструкция устройства. Устройство содержит набор датчиков (n датчиков) из линий задержки на ПАВ. Каждый датчик содержит пару ЛЗ на ПАВ, а каждая ЛЗ на ПАВ в паре, являющаяся каналом, состоит из пьезоэлектрического звукопровода 1, на полированной поверхности которого расположены приемо-передающий ВШП 2, отражательный ВШП 3. На торцах звукопровода 1 нанесены акустопоглотители 4. Звукопровод 1 вместе с акустопоглотителями 4 и ВШП 2, 3 помещены в герметичный корпус 5. К приемо-передающему ВШП 2 подсоединена через выводы в корпусе 6 приемо-передающая антенна 7. Опросное устройство 8 посылает через приемо-передающую антенну 9 считывающий импульс 10. Отраженный от ЛЗ импульс 11 попадает снова в опросное устройство 8 через антенну 9, а затем в вычислительное устройство 12.
На фиг. 2 показан приемо-передающий ВШП 2 (см.фиг.1) подробно. Он состоит из Q однонаправленных секций, расстояние между которыми равно Nλ. Такой ВШП преимущественно излучает (принимает) ПАВ только вправо. Это показано стрелкой, а зачеркнутая стрелка означает направление, куда этот ВШП преимущественно не излучает (не принимает) ПАВ.
На фиг. 3 показан отражательный ВШП 3 (см.фиг.1) подробно. Он состоит из однонаправленных секций, расстояние между которыми равно 2λ (M=2). Такой ВШП преимущественно излучает (принимает) ПАВ только влево. Это показано стрелкой, а зачеркнутая стрелка означает направление, куда этот ВШП преимущественно не излучает (не принимает) ПАВ.
При этом следует отметить, что приемо-передающий и отражательный ВШП в каждой паре ЛЗ одинаковые секционированные однонаправленные ВШП с одним и тем же числом однонаправленных секций, но с разным периодом их расположения в паре, т.е. расстояние между ними в первой ЛЗ пары как минимум в 2 раза меньше, чем во второй ЛЗ пары.
На фиг. 4 показаны пары ЛЗ на ПАВ, пронумерованные от 1 до i (датчики с функцией антиколлизии пронумерованные от 1 до n), для измерения температуры в разных частях исследуемого объекта. Разные пары ЛЗ имеют разные центральные частоты от f01 до fn, но расстояние между ВШП каждой пары ЛЗ равны расстоянием между ВШП в первой паре.
На фиг. 5 показана частотная характеристика параметра S11i для i–го датчика, где i – это 1,2,3 … n датчики, 13 – частотная характеристика параметра S11 для датчика, в котором расстояние между приемо-передающим и отражательным ВШП в первой ЛЗ пары (1280 λ0, λ0=VПАВ/f0– длина ПАВ на центральной частоте ВШП i – того датчика) в 4 раза больше чем это расстояние (320λ0) во второй ЛЗ пары, Δf1 – расстояние между большим и малым соседними максимумами, Δf2 – расстояние между ближайшими большими максимумами. 14 – частотная характеристика параметра S11 для одной ЛЗ из пары, в которой расстояние между приемо-передающим и отражательным ВШП наибольшее.
В данном описании описаны способ и устройство для беспроводного мониторинга температуры на основе пассивных линий задержки на поверхностных акустических волнах с функцией антиколлизии, согласно которым посредством разделения сигналов формируют набор из n датчиков на ПАВ-линиях задержки, проводят опрос датчиков, принимают сигналы откликов датчиков и проводят их обработку, при этом последовательно для каждого датчика определяют время задержки сигнала от датчика до опросного устройства. Каждая линия задержки содержит приемо-передающий ВШП, соединенный с антенной, и отражательные ВШП. Каждый датчик содержит пару линий задержки (ЛЗ) на ПАВ, причем в каждой паре ЛЗ приемо-передающие ВШП одинаковые и отражательные ВШП одинаковые, но расстояние между ними в первой ЛЗ пары как минимум в 2 раза меньше, чем во второй ЛЗ пары. В качестве приемо-передающего ВШП и отражательного ВШП каждой пары ЛЗ используется секционированные однонаправленные ВШП с одним и тем же числом однонаправленных секций Q, но с разным периодом их расположения. Минимальное число секций в каждом из этих ВШП равно 
 , затем сравнивают
, затем сравнивают  различных пар ЛЗ между собой и с
различных пар ЛЗ между собой и с  – задержкой полученной для i – той пары ЛЗ при известной температуре
– задержкой полученной для i – той пары ЛЗ при известной температуре  , по разности
, по разности  и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:
и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:  , где α – ТКЗ.
, где α – ТКЗ.
Способ и устройство для мониторинга температуры на основе пассивных линий задержки на поверхностных акустических волнах работают следующим образом.
Считыватель 8 через антенну 9 посылает на n датчиков последовательно линейно частотно модулированные (ЛЧМ) радиоимпульсы 10 с центральной частотой 

Δf1=1/ τ1,
где τ1 – задержка ПАВ между ВШП для ЛЗ пары с большим расстоянием. А расстояние между большими максимумами (16) определяется исключительно задержкой ПАВ между ВШП для ЛЗ с меньшим расстоянием между ВШП:
Δf2=1/ τ2,
где τ2 – задержка ПАВ между ВШП для ЛЗ пары с меньшим расстоянием.
Кривая 14 (фиг.5) показывает частотную характеристику параметра S11 в том случае, если расстояние между ВШП в паре ЛЗ одинаковые или если подключена только одна ЛЗ с большим расстоянием между ВШП. Видно, что расстояния между ближайшими максимумами на этой кривой полностью совпадают с расстояниями между максимумами 15 и 16 на кривой 13.
Измеряя эти расстояния, вычисляют задержку между отражательными ВШП пары ЛЗ датчика как  Задержки τ1 и τ2, содержат задержки опросного сигнала (
Задержки τ1 и τ2, содержат задержки опросного сигнала ( , которые он проходит от считывателя до датчика, которое одинаково для каждой ЛЗ пары, т.е.
, которые он проходит от считывателя до датчика, которое одинаково для каждой ЛЗ пары, т.е.  и
и  , где
, где 
 Тогда
Тогда 
 взаимно вычитаются и не зависит от расстояния между датчиком и считывателем. Затем сравнивают различных пар ЛЗ между собой и с – задержкой полученной для i – той пары ЛЗ при известной температуре
взаимно вычитаются и не зависит от расстояния между датчиком и считывателем. Затем сравнивают различных пар ЛЗ между собой и с – задержкой полученной для i – той пары ЛЗ при известной температуре  , и по разности и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:
, и по разности и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:
 ,
,
где α – температурный коэффициент задержки (ТКЗ).
Меньшее расстояние между центрами ВШП в первой ЛЗ каждой пары выбирается равным не менее 2-х длин приемо-передающего ВШП 2, но не менее 2-х мм. В этом случае на частотной характеристике параметра S11 всегда будет несколько больших максимумов 15, при этом электромагнитный опросный радиосигнал, отраженный помимо датчиков от удаленных металлических поверхностей, расстояние до которых обеспечивает задержку близкую к задержке от отражательных ВШП будет значительно ослаблен, поскольку это расстояние составляет как минимум 300 м. Вместе с тем коэффициент отражения ПАВ от отражательных ВШП пары ЛЗ будет близок к «1», что обеспечит достаточное отношение сигнал/помеха для уверенного приема и обработки сигналов-откликов от датчиков.
Так как центральные частот ЛЗ датчиков определяются по формуле 

 соседних каналов не перекрываются и соседние каналы не влияют на АЧХ опрашиваемого в данный момент датчика (канала). Это позволяет последовательно опрашивать все датчики устройства мониторинга за счет частотного разделения радиоканалов датчиков, что обеспечивает решение задачи коллизий при их опросе одним считывающим устройством.
соседних каналов не перекрываются и соседние каналы не влияют на АЧХ опрашиваемого в данный момент датчика (канала). Это позволяет последовательно опрашивать все датчики устройства мониторинга за счет частотного разделения радиоканалов датчиков, что обеспечивает решение задачи коллизий при их опросе одним считывающим устройством.
Пример выполнения.
В качестве считывателя использовался ИККП «Обзор-103», который формирует ЛЧМ радиоимпульсы с необходимой полосой пропускания, причем шаг перестройки частоты может быть всего несколько герц, что обеспечивает необходимую точность измерения температуры. Выбран диапазон частот 820-990 МГц (f0=905 МГц,  . В качестве вычислительного устройства использовался ПК “Acer E1-571-G”. ЛЗ были выполнены на подложках ниобата лития YX/128о – среза (
. В качестве вычислительного устройства использовался ПК “Acer E1-571-G”. ЛЗ были выполнены на подложках ниобата лития YX/128о – среза ( обрабатывались с помощью программного обеспечения “MathCad-14”. При 20оС было установлено, что задержка между ВШП
обрабатывались с помощью программного обеспечения “MathCad-14”. При 20оС было установлено, что задержка между ВШП  . При нагревании эта задержка увеличилась до 1390 нс. Тогда искомая температура
. При нагревании эта задержка увеличилась до 1390 нс. Тогда искомая температура  , α=80·10-6 1/град. Аналогично измерялись температуры на других датчиках, для чего в ЛЧМ импульсах менялась центральная частота при неизменной полосе пропускания.
, α=80·10-6 1/град. Аналогично измерялись температуры на других датчиках, для чего в ЛЧМ импульсах менялась центральная частота при неизменной полосе пропускания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный датчик тока на поверхностных акустических волнах | 2021 |
|
RU2779616C1 |
| Пассивный антиколлизионный датчик температуры на поверхностных акустических волнах с частотно-временным кодовым отличием | 2017 |
|
RU2665496C1 |
| ПАССИВНЫЙ ДАТЧИК ТЕМПЕРАТУРЫ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2015 |
|
RU2585487C1 |
| Система измерения температуры шин электрических шкафов | 2020 |
|
RU2748868C1 |
| Пассивный беспроводной датчик ультрафиолетового излучения на поверхностных акустических волнах | 2018 |
|
RU2692832C1 |
| Способ измерения физических величин с помощью датчиков на поверхностных акустических волнах | 2016 |
|
RU2629892C1 |
| Устройство считывания информации с беспроводного датчика на поверхностных акустических волнах | 2020 |
|
RU2748391C1 |
| ПАССИВНЫЙ БЕСПРОВОДНЫЙ ДАТЧИК МАГНИТНОГО ПОЛЯ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2018 |
|
RU2758341C1 |
| АНТИКОЛЛИЗИОННАЯ СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ | 2006 |
|
RU2333513C1 |
| ДАТЧИК ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2008 |
|
RU2387051C1 |
Изобретение относится к области радиоэлектроники и может быть использовано в системах беспроводного мониторинга состояния объектов с целью предупреждения аварийных ситуаций при контроле физических величин, в частности температуры. Способ беспроводного мониторинга температуры на основе пассивных линий задержки (ЛЗ) на поверхностных акустических волнах (ПАВ) с функцией антиколлизии включает формирование набора из n датчиков, где n - число датчиков, на ПАВ-линиях задержки посредством частотного разделения сигналов, проведение опроса датчиков, принятие сигналов откликов датчиков и проведение их обработки, при этом последовательно для каждого датчика определяют время задержки сигнала от датчика до опросного устройства, при этом датчики располагают в разных местах объекта мониторинга, по изрезанности амплитудно-частотной характеристики (АЧХ) параметра S11i антенны считывателя, который измеряют в опросном устройстве, определяют задержку ПАВ между приемо-передающим и отражательным ВШП с учетом времени распространения опросного сигнала от опросного устройства до n-го датчика (i-й пары ЛЗ) как τ1i=1/Δf1i, τ2i=1/Δf2i, где Δf1i - расстояние между ближайшими большим и малым максимумами АЧХ параметра S11i, а Δf2i - расстояние между большими максимумами АЧХ параметра S11i, для i-й пары ЛЗ вычисляют задержку между отражательными ВШП пары ЛЗ датчика как  , затем сравнивают
, затем сравнивают  различных пар ЛЗ между собой и с
различных пар ЛЗ между собой и с  - задержкой, полученной для i-й пары ЛЗ при известной температуре
- задержкой, полученной для i-й пары ЛЗ при известной температуре  , по разности
, по разности  и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:
и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как:  , где α - ТКЗ. Техническим результатом заявляемого изобретения является уменьшение потерь при отражении ПАВ от датчика, повышение точности определения температуры, а также устранение влияния расстояния между датчиком и считывателем на точность измерения температуры. 2 н.п. ф-лы, 5 ил.
, где α - ТКЗ. Техническим результатом заявляемого изобретения является уменьшение потерь при отражении ПАВ от датчика, повышение точности определения температуры, а также устранение влияния расстояния между датчиком и считывателем на точность измерения температуры. 2 н.п. ф-лы, 5 ил.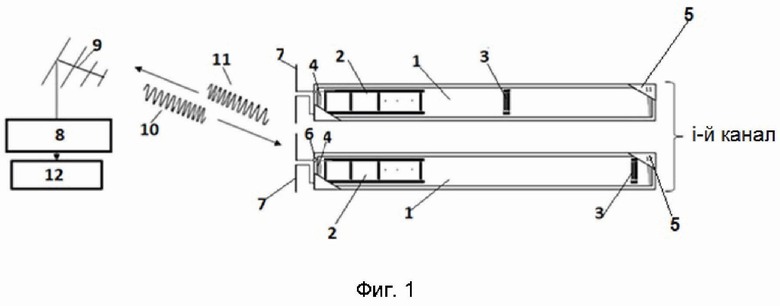
1. Способ беспроводного мониторинга температуры на основе пассивных линий задержки (ЛЗ) на поверхностных акустических волнах (ПАВ) с функцией антиколлизии, включающий формирование набора из n датчиков, где n - число датчиков, на ПАВ-линиях задержки посредством частотного разделения сигналов, проведение опроса датчиков, принятие сигналов откликов датчиков и проведение их обработки, при этом последовательно для каждого датчика определяют время задержки сигнала от датчика до опросного устройства, отличающийся тем, что датчики располагают в разных местах объекта мониторинга, по изрезанности амплитудно-частотной характеристики (АЧХ) параметра S11i антенны считывателя, который измеряют в опросном устройстве, определяют задержку ПАВ между приемо-передающим и отражательным ВШП с учетом времени распространения опросного сигнала от опросного устройства до n-го датчика (i-й пары ЛЗ) как τ1i=1/Δf1i, τ2i=1/Δf2i, где Δf1i - расстояние между ближайшими большим и малым максимумами АЧХ параметра S11i, а Δf2i - расстояние между большими максимумами АЧХ параметра S11i, для i-й пары ЛЗ вычисляют задержку между отражательными ВШП пары ЛЗ датчика как Δτi=τ2i-τ1i, затем сравнивают Δτi различных пар ЛЗ между собой и с Δτ0 - задержкой, полученной для i-й пары ЛЗ при известной температуре t°, по разности Δτi-Δτ0 и известному коэффициенту температурной задержки (ТКЗ) определяют температуру как: ti°=(Δτi-Δτ0)/(α∙Δτ0 )+t°, где α - ТКЗ.
2. Устройство беспроводного мониторинга температуры на основе пассивных линий задержки (ЛЗ) на поверхностных акустических волнах (ПАВ) с функцией антиколлизии, содержащее опросное устройство с приемо-передающей антенной и вычислительным устройством, а также набор датчиков из линий задержки на ПАВ, отличающееся тем, что каждый датчик содержит пару ЛЗ на ПАВ, а каждая ЛЗ на ПАВ в паре, являющаяся каналом, состоит из герметичного корпуса, содержащего пьезоэлектрический звукопровод, на поверхности которого расположены приемо-передающий и отражательный встречно-штыревой преобразователи (ВШП), на торцах пьезоэлектрического звукопровода нанесены акустопоглотители, к приемо-передающему ВШП подсоединена, через выводы в корпусе, приемо-передающая антенна, причем приемо-передающий и отражательный ВШП в каждой паре ЛЗ одинаковые секционированные однонаправленные ВШП с одним и тем же числом однонаправленных секций, но с разным периодом их расположения в паре, минимальное число секций в каждом из этих ВШП равно Q=4π/kэф2, где kэф2 - квадрат коэффициента электромеханической связи для ПАВ, при этом расстояние между приемо-передающим и отражательным ВШП в первой ЛЗ пары как минимум в 2 раза меньше, чем во второй ЛЗ пары, при этом расстояние между секциями приемо-передающего ВШП равно Nλ, а отражательного ВШП равно 2λ, также разные пары ЛЗ имеют разные центральные частоты, но расстояния между ВШП каждой пары ЛЗ равны расстояниям между ВШП в первой паре ЛЗ.
| US 7434989 B2, 14.10.2008 | |||
| СПОСОБ УСТРАНЕНИЯ КОЛЛИЗИИ В НАБОРЕ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2585911C1 |
| ПАССИВНЫЙ ДАТЧИК ТЕМПЕРАТУРЫ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2015 |
|
RU2585487C1 |
| Устройство для дистанционного измерения температуры | 1980 |
|
SU1000789A1 |
| US 7961105 B2, 14.06.2011. | |||

