Перекрестные ссылки на родственные заявки
По настоящей заявке испрашивается приоритет предварительной патентной заявки США №60/657174, поданной 28 февраля 2005 г.
Область техники
Настоящее изобретение относится к электромагнитному (ЭМ) каротажу скважины, в частности к способам и устройству для балансировки приборов с индукционной матрицей.
Уровень техники
В ходе разведки и эксплуатации нефтяных и газовых месторождений развертываются многочисленные системы скважинного каротажа для сбора данных о геологических пластах. Данные содержат информацию, которую можно использовать для поиска подземных залежей углеводородов и для определения типов и количества подземных углеводородов. В процессе каротажа прибор можно опускать в ствол скважины, пересекающий подземный пласт, либо после того, как скважина пробурена, либо в процессе бурения. Типичный каротажный прибор включает в себя «зонд», излучающий, например, акустические или ЭМ волны для взаимодействия с окружающим пластом. Сигналы, возникающие вследствие такого взаимодействия, регистрируются и измеряются одним или несколькими датчиками устройства. Обрабатывая зарегистрированные сигналы, можно получить профиль (контур) или протокол свойств пласта.
Методы каротажа, известные в технике, включают в себя «проводной» каротаж, каротаж во время бурения (LWD), измерение во время бурения (MWD) и каротаж во время спускоподъемной операции (LWT). Проводной каротаж предусматривает спуск прибора в уже пробуренный ствол скважины на конце электрического кабеля для получения измерений при перемещении прибора вдоль ствола скважины. LWD и MWD предусматривают размещение прибора в буровом снаряде для использования в процессе бурения ствола скважины через пласты. LWT предусматривает размещение источников или датчиков в бурильной колонне для получения измерений при подъеме колонны из ствола скважины.
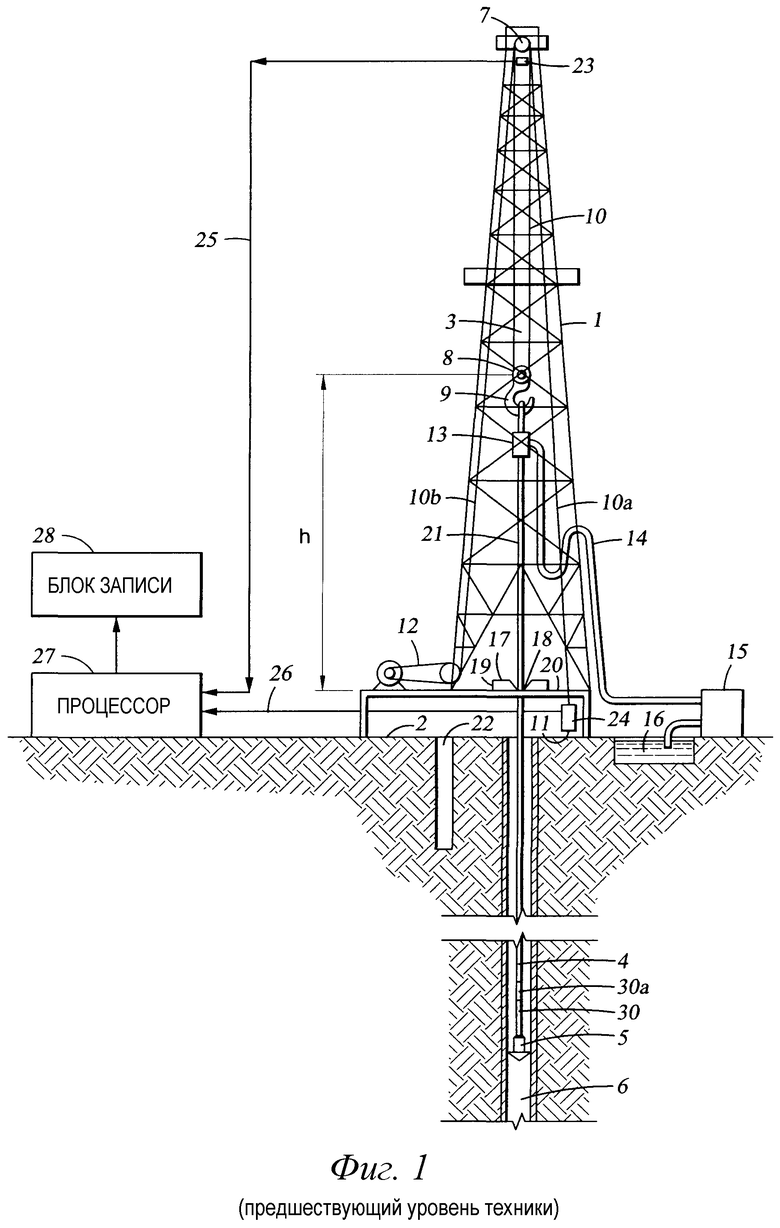
На фиг.1 показана типичная установка LWD или MWD, имеющая буровую установку, бурильная колонна которой переносит каротажный прибор в стволе скважины. Вращающаяся буровая установка содержит вышку 1, установленную над поверхностью 2 земли, и связана с подъемным механизмом 3. Подъемный механизм 3 имеет кронблок 7, установленный в верхней точке вышки 1, вертикально перемещающийся блок 8 с присоединенным к нему крюком 9, трос 10, проходящий вокруг блоков 7 и 8 для формирования, с одной стороны, неподвижного конца 10а, привязанного к фиксированной точке 11, и, с другой стороны, действующего конца 10b, который наматывается на барабан лебедки 12. Бурильная колонна 4, сформированная из нескольких сегментов пустотелых бурильных труб, соединенных своими концами, подвешена на крюке 9 посредством вертлюга 13, соединенного шлангом 14 с буровым насосом 15. Буровой насос 15 закачивает буровой раствор в скважину 6 через пустотелые трубы бурильной колонны 4, который выходит из буровой коронки 5 для всплытия обломков породы из скважины 6. Буровой раствор может поступать из емкости 16 для хранения бурового раствора, в которую также может поступать избыток бурового раствора из скважины 6. Бурильная колонна 4 может подниматься путем вращения подъемного механизма 3 с помощью лебедки 12. При подъеме и спуске буровых труб бурильную колонну 4 нужно временно отсоединять от подъемного механизма 3, при этом вес колонны 4 ложится на клинья 17. Клинья 17 фиксируются в коническом углублении 18 на карусели 19, установленной на платформе 20. Нижняя часть бурильной колонны 4 может включать в себя один или несколько приборов 30 для исследования условий бурения в стволе скважины или для исследования свойств геологических пластов. В случае акустического каротажа прибор 30 может включать в себя по меньшей мере один передатчик и множество приемников.
Изменение высоты h подвижного блока 8 в течение цикла подъема бурильной колонны измеряется датчиком 23, который может представлять собой датчик угла поворота, присоединенный к рабочему шкиву кронблока 7. Вес, приложенный к крюку 9, также может измеряться датчиком 24 деформации, вставленным в неподвижный конец 10а троса 10 для измерения его натяжения. Датчики 23 и 24 подключены сигнальными линиями 25 и 26 к блоку 27 обработки, в который встроены часы. Блок 28 записи подключен к блоку 27 обработки, который, предпочтительно, представляет собой компьютер. Кроме того, скважинный прибор 30 может включать в себя блок 30a обработки. Скважинный блок 30a обработки и/или наземный блок 27 обработки, который может включать в себя память, можно использовать для анализа данных и определения свойств пласта.
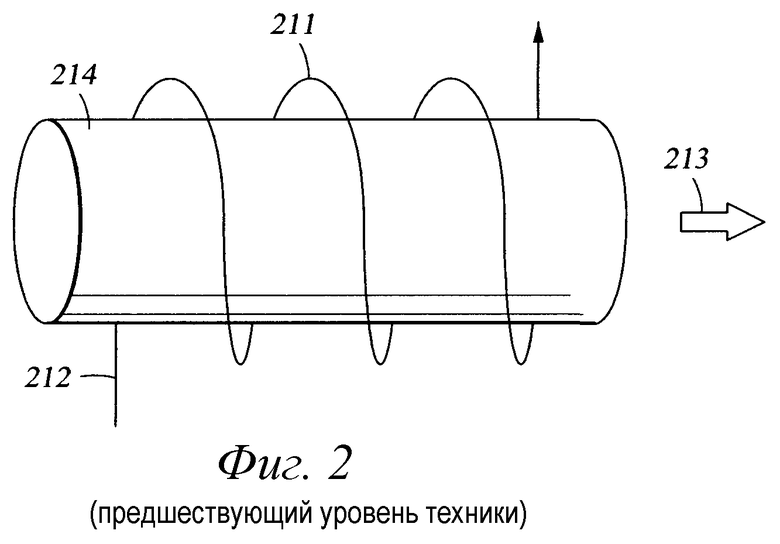
Из скважинных приборов широко используются ЭМ каротажные приборы. ЭМ каротажные приборы содержат антенны, которые могут выполнять роль передатчиков и/или приемников. Антенны обычно представляют собой соленоиды. На фиг.2 показана катушка 211, содержащая изолированные электрические провода, намотанные в виде одного или нескольких витков на основу 214. Во время работы катушка 211 может функционировать как передающая антенна, когда по ней пропускают переменный ток или осциллирующий электрический сигнал 212. Передающая антенна излучает ЭМ волны через буровой раствор ствола скважины в окружающий пласт. Катушка 211 также может функционировать как приемная антенна, которая принимает ЭМ сигналы, несущие информацию о взаимодействии между ЭМ волнами и буровым раствором/пластом.
Катушка 211, через которую пропускают переменный ток 212, образует магнитный диполь, имеющий магнитный момент. Величина магнитного момента пропорциональна силе тока в проводе, числу витков провода и площади, охватываемой катушкой. Направление и величину магнитного момента можно представить вектором 213, параллельным продольной оси катушки. В традиционных индукционных каротажных приборах передающие и приемные антенны установлены так, что их оси выровнены относительно продольной оси прибора. Таким образом, эти приборы выполнены так, что их антенны имеют продольные магнитные диполи (LMD). Когда антенну LMD помещают в ствол скважины и активируют для передачи ЭМ энергии, наведенные электрические токи текут вокруг антенны в стволе скважины и в окружающих пластах, но никакой полный ток не течет вверх или вниз вдоль ствола скважины.
Некоторые ЭМ скважинные каротажные приборы имеют наклонные или поперечные катушки, т.е. ось катушки не параллельна продольной оси основы. Поэтому антенна имеет поперечный или наклонный магнитный диполь (TMD). Конфигурация TMD позволяет прибору осуществлять сбор информации в трех измерениях, например информацию об анизотропии удельного сопротивления или о положениях и ориентациях спадов и разломов. Кроме того, регистрируются данные в зависимости от направления, что можно использовать для направленного бурения. Каротажные приборы, снабженные антеннами TMD, были описаны в патентах США №6147496, 4319191, 5757191 и 5508616. В определенных условиях антенна TMD может обеспечивать полный ток, текущий вверх или вниз вдоль ствола скважины. Некоторые антенны TMD выполнены посредством нескольких катушек. Например, конкретная конструкция антенны TMD включает в себя набор из трех катушек, и такую антенну называют трехосной антенной.
В проводных приложениях антенны обычно заключены в корпус, выполненный из прочных непроводящих материалов, например многослойного стекловолоконного материала. В приложениях LWD антенны обычно заключены в металлический корпус, что позволяет им выдерживать суровые условия окружающей среды и условия, встречающиеся в процессе бурения. Альтернативно, каротажные приборы могут быть выполнены из композитных материалов, обеспечивающих непроводящую конструкцию для закрепления антенн. В патентах США №6084052, 6300762, 5988300, 5944124 и в патенте Великобритании GB 2337546 раскрыты примеры приборов и трубных изделий на основе композитных материалов для применения на нефтяных месторождениях.
Индукционный каротаж является общеизвестным видом ЭМ каротажа. В этом типе каротажа используются индукционные приборы для формирования профиля электропроводности или удельного сопротивления пластов, окружающих ствол скважины. В патентах США №3340464, 3147429, 3179879, 3056917 и 4472684 раскрыты типичные скважинные каротажные приборы на основе индукционного каротажа.
Традиционный индукционный каротажный прибор или «зонд» может включать в себя передающую антенну и приемную антенну, причем передатчик и приемник упоминаются лишь для упрощения иллюстрации. Специалисту в данной области очевидно, что передатчик можно использовать как приемник и приемник также можно использовать как передатчик в зависимости от применения. Каждая антенна может включать в себя одну или несколько катушек и может монтироваться на одной и той же детали основы или на разных деталях основы, т.е. передающая антенна и приемная антенна могут располагаться в разных секциях прибора. Антенны могут быть разнесены относительно друг друга по оси в продольном направлении прибора.
При использовании на передающую антенну подают переменный ток. При этом возникает ЭМ поле, которое наводит вихревые токи в пласте, окружающем ствол скважины. Сила вихревых токов пропорциональна электропроводности пласта. ЭМ поле, порождаемое вихревыми токами, в свою очередь, создает электродвижущую силу в одной или нескольких приемных катушках. Амплитуду и фазу напряжения на приемной катушке определяют путем фазосинхронизированного детектирования, усиления и оцифровки полученного сигнала электродвижущей силы. Регистрируя и обрабатывая напряжения на приемнике, можно получить оценку профиля электропроводности пласта. В патенте США №5157605 раскрыт скважинный каротажный прибор с индукционной матрицей, используемый для сбора данных напряжения.
В принципе, профиль электропроводности можно получить, просто измеряя напряжения на приемнике. На практике напряжения на приемнике зависят не только от «истинных» сигналов, распространяющихся через пласт, но также от прямой связи между передатчиком и приемником. Общеизвестно, что чувствительность измерений, полученная при каротаже индукционного типа, определяется прямой (взаимной) связью приемника и передатчика.
Математически амплитуду и фазу напряжения принятого сигнала можно выразить комплексным числом, т.е. комплексным вектором напряжения. Соответственно, истинная электропроводность σa (измеренная приемной индукционной матрицей) выражается своими действительной и мнимой частями, σa=σR+iσX. Действительная часть σR выражает истинный сигнал из пласта, а мнимая часть σX включает в себя прямую связь, которая может быть на несколько порядков величины больше значения σR, когда матрица разбалансирована. Это можно видеть из общеизвестной формулы, описывающей электропроводность, измеряемую двухкатушечной матрицей (один передатчик и один приемник), когда передатчик для простоты рассматривается как точечный диполь,

где ω - частота, µ - магнитная проницаемость (однородной) среды; k2=iωµσ, σ - электропроводность среды, L - расстояние между передатчиком и приемником. Задавая толщину скин-слоя как  (так что k=(1+i)/δ) и разлагая σa по степеням L/δ, получаем:
(так что k=(1+i)/δ) и разлагая σa по степеням L/δ, получаем:

Первый член в правой стороне уравнения (2) - это искомая электропроводность пласта σ. Второй член -2i/(ωµL2) вносит вклад только в σX. Он не зависит от σ и соответствует прямой взаимной связи передатчика и приемника, которая существует в воздухе. Несбалансированная индукционная матрица может иметь очень большое значение σX, например, при малом L. Поэтому, для достижения высокой чувствительности индукционного прибора, индукционную матрицу нужно сбалансировать, чтобы уменьшить значение σX.
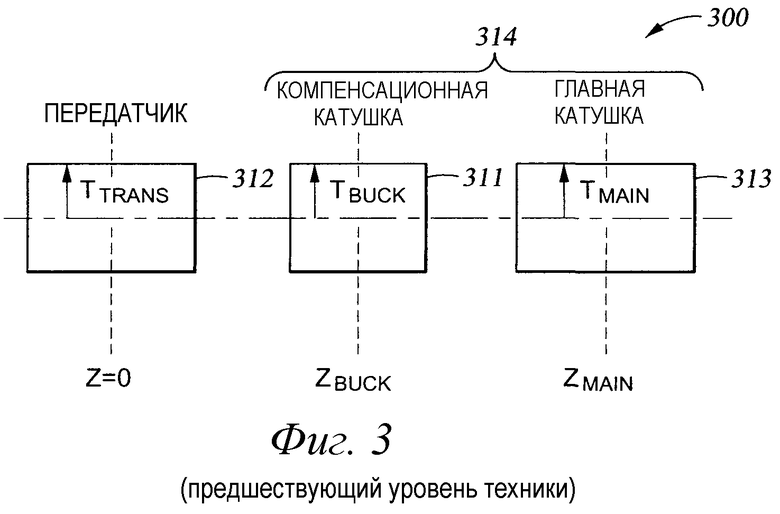
Как показано на фиг.3, каротажный прибор индукционного типа обычно включает в себя «компенсационную» катушку 311 на приемнике 314 для исключения или ослабления прямой связи между передатчиком 312 и главным приемником 313. Продольная ось прибора изображена на фиг.3 пунктирной линией. На приемнике 314 предусмотрены две приемные катушки, главная катушка 313 и компенсационная катушка 311 в сбалансированной конфигурации для подавления связи между передатчиком и главной катушкой с использованием связи между передатчиком и компенсационной катушкой. Компенсационная катушка 311 расположена между передатчиком 312 и главной катушкой 313 приемника 314. Реальные индукционные матрицы всегда взаимно сбалансированы с помощью компенсационной катушки. Это обусловлено тем фактом, что прямая связь между передатчиком и приемником обычно на несколько порядков сильнее истинных сигналов, причем последние сильно ослабляются при прохождении через пласт.
Минимальная конфигурация для взаимно сбалансированной матрицы представляет собой трехкатушечную матрицу, показанную на фиг.3, включающую в себя передатчик 312 (Т), главную катушку 313 приемника (R1) и компенсационную катушку 311 приемника (R2). Чтобы сбалансировать матрицу, местоположения приемных катушек (zmain и zbuck) и число витков в этих катушках (Nmain и Nbuck) выбирают так, чтобы сумма их откликов была близка к нулю в воздухе. То есть напряжения на двух приемных катушках должны удовлетворять соотношению: VR1+VR2=0 в воздухе. Поэтому отклики операции каротажа будут суммой откликов связи T―R1 и откликов связи T―R2.
Напряжение взаимной связи зависит от L (в приближении точечного диполя), как 1/L3 (дополнительная степень 1/L обусловлена зависимостью 1/L для коэффициента прибора K). Поэтому условие балансировки индукционной матрицы выполняется, когда 
где Μmain и Mbuck - магнитные моменты главной и компенсационной катушек. Если все витки катушки имеют одинаковую геометрию, то Mmain и Mbuck равны M0Nmain и M0Nbuck соответственно, где: M0 - магнитный момент одного витка. Поэтому условие балансировки выполняется, когда
Для выполнения этого условия два члена в левой стороне уравнения (3) должны иметь противоположные знаки. Этого можно добиться, наматывая провода в противоположных направлениях для компенсационной и главной приемных катушек. Зависимость 1/L3 для напряжений взаимной связи приводит к тому, что зависимость взаимного баланса от внешних факторов, например температуры и давления, гораздо сильнее для коротких матриц, что обуславливает более высокий показатель погрешности для коротких матриц.
Теоретически, необходимые положения приемных катушек можно вычислить с высокой точностью, даже когда передатчик является соленоидом конечного размера. На практике все геометрические параметры, например положения (zbuck и zmain) и радиусы (rtrans, rbuck и rmain) катушек, имеют конечные диапазоны изменения. Прямые взаимные связи T―R1 и T―R2 очень чувствительны даже к незначительным изменениям некоторых геометрических параметров, вследствие чего малые ошибки или отклонения, например, в радиусах катушек могут привести к большим отклонениям в измеренных сигналах. Поэтому при изготовлении ЭМ прибора может потребоваться дополнительная регулировка конфигурации катушек относительно расчетной конфигурации. В практической конфигурации положения компенсационной катушки и главной катушки (zbuck и zmain) относительно положения передатчика (z=0) требуется тщательно регулировать с высокой степенью точности для минимизации прямых взаимных связей. Такая балансировка или регулировка может быть очень сложной и дорогостоящей.
Один известный способ точной настройки антенны состоит в использовании подвижных катушек, что позволяет изменять положения катушек, например главных или компенсационных катушек, для минимизации прямой связи. Например, если прямая связь (выражающаяся в остаточной σX) для конкретной матрицы существенна, ее можно минимизировать (или свести к нулю), изменяя положение антенны, например, компенсационной катушки zbuck. Однако на практике предпочтительно, чтобы прибор или антенна не имела движущихся частей.
Альтернативный способ точной настройки антенны состоит в добавлении петли вблизи одной из катушек (например, приемной катушки), что позволяет осуществлять точную регулировку. Еще один подход состоит в регулировке числа витков в компенсационной катушке. Однако такой подход зачастую не имеет практического смысла, поскольку удаление или добавление одного витка в катушке может привести к большим изменениям в σX. Это особенно справедливо, когда расстояние между компенсационной катушкой и передающей катушкой невелико. Поэтому по-прежнему существует необходимость в новых подходах к балансировке индукционных матриц.
Сущность изобретения
Технической задачей настоящего изобретения является создание электромагнитного каротажного прибора, способа его изготовления и способов балансировки индукционных матриц на электромагнитном каротажном приборе, которые обеспечивают удобное регулирование эффективного числа витков и/или эффективного положения приемной или передающей катушки, без использования подвижных частей, что позволяет сократить время балансировки матрицы.
Электромагнитный каротажный прибор согласно одному варианту осуществления изобретения содержит основу, которую можно разместить в скважине, по меньшей мере одну антенну, установленную на основе, и совокупность катушек, установленных на основе вблизи по меньшей мере одной антенны, причем совокупность катушек можно избирательно подключать к по меньшей мере одной антенне.
Согласно другому аспекту изобретения предложены способы балансировки индукционной матрицы на электромагнитном каротажном приборе. Способ согласно одному варианту осуществления изобретения включает в себя измерение взаимной связи между передатчиком и приемником на электромагнитном каротажном приборе и избирательное подключение подмножества совокупности катушек на электромагнитном каротажном приборе к передатчику или приемнику на основании измеренной взаимной связи.
Еще один аспект изобретения относится к способам изготовления электромагнитного каротажного прибора. Способ согласно одному варианту осуществления изобретения включает в себя выполнение окна обмотки на основе, размещение антенны в окне обмотки, выполнение множества прорезей на основе для размещения совокупности катушек и размещение совокупности катушек в совокупности прорезей, причем совокупность катушек можно избирательно подключать к антенне.
Краткое описание чертежей
Другие аспекты и преимущества изобретения раскрыты в нижеследующем описании со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает известную буровую установку и бурильную колонну со скважинным каротажным прибором в стволе скважины;
фиг.2 - конструкцию известной индукционной катушки;
фиг.3 - известную трехкатушечную приемопередающую матрицу;
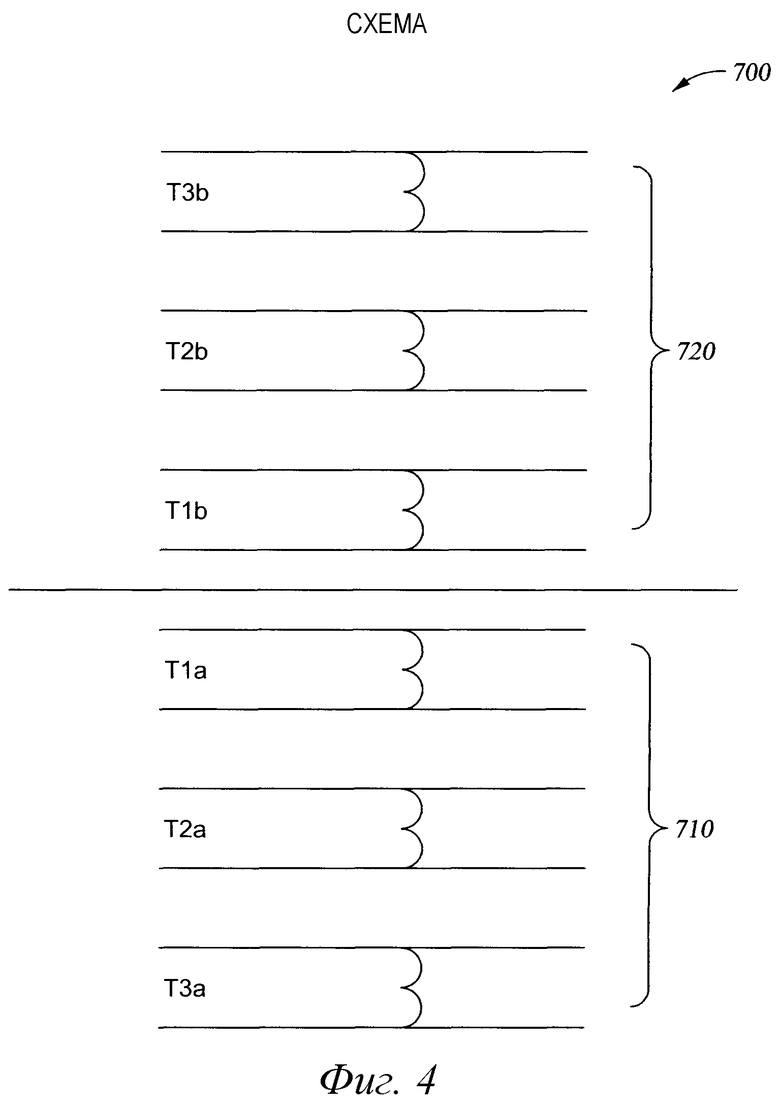
фиг.4 изображает схему индукционной катушки с выбором отводов согласно изобретению;
фиг.5-11 - общие виды вариантов изготовления индукционной катушки с выбором отводов согласно изобретению;
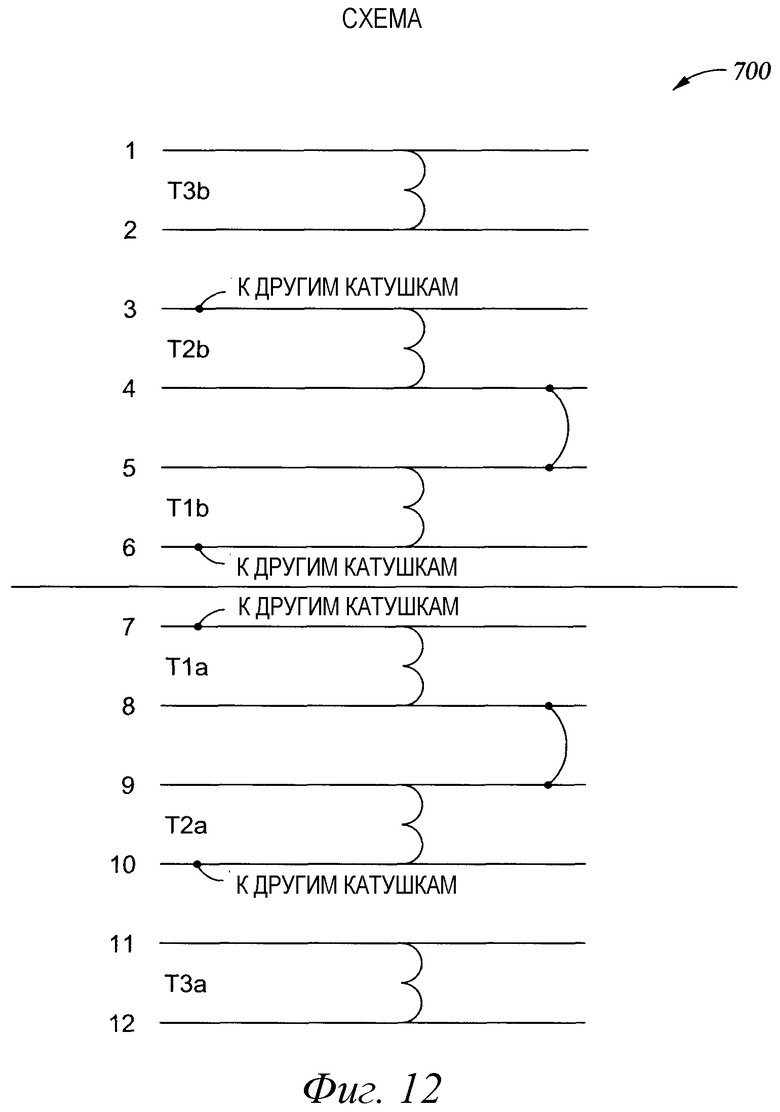
фиг.12 - схему конкретного выбора отводов и соединения катушек согласно изобретению;
фиг.13 - общий вид соединения между индукционными катушками с выбором отводов и антенной согласно изобретению;
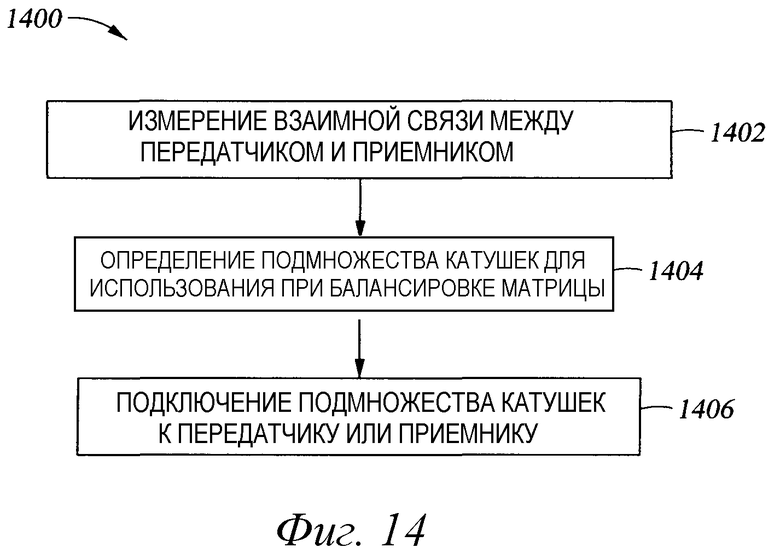
фиг.14 - последовательность операций при балансировке индукционной матрицы согласно изобретению;
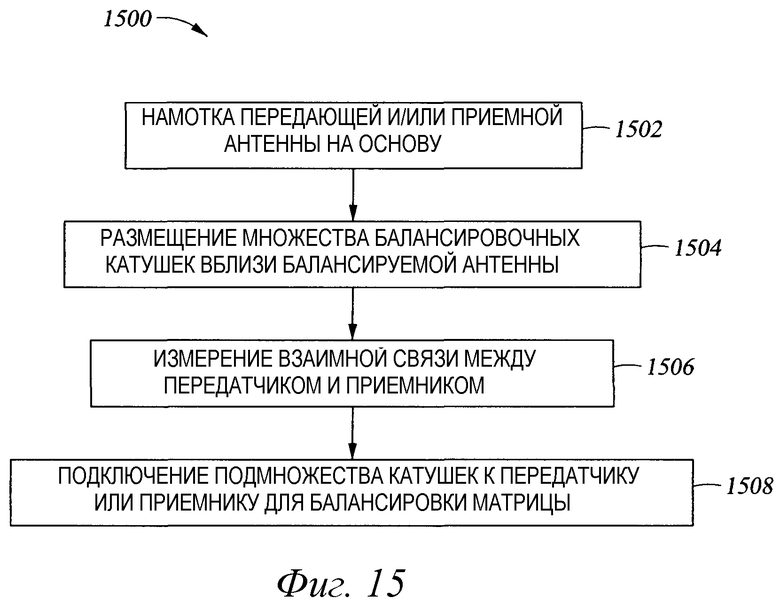
фиг.15 - последовательность операций при изготовлении ЭМ прибора согласно изобретению.
Подробное описание предпочтительных вариантов воплощения изобретения
Настоящее изобретение относится к способам и устройству для балансировки матрицы индукционных катушек. Согласно изобретению используется набор выбираемых индивидуальных обмоток катушки, называемый индукционной катушкой с выбором отводов (STIC). Множество обмоток STIC можно избирательно соединять между собой и подключать к другим катушкам, например к приемнику или передатчику. STIC может устранять нежелательную прямую связь (выражающуюся в σX) между передающими и приемными катушками в индукционной матрице, и особенно предпочтительно, когда матрица является матрицей с фиксированными катушками, в которой все катушки находятся в заранее определенных положениях, которые не могут изменяться.
Согласно варианту осуществления настоящего изобретения STIC 700 (фиг.4) может содержать два набора балансировочных катушек (отводов) 710 и 720. Каждый набор содержит, например, три разные балансировочные катушки (отводы) T1a, T2a, T3a и T1b, T2b, T3b соответственно. Специалисту в данной области очевидно, что количество катушек в каждом наборе может отличаться от трех и что количество наборов может отличаться от двух. Количество наборов и количество катушек может быть любым требуемым числом.
В примере, показанном на фиг.4, каждая из трех балансировочных катушек может быть выбрана независимо и подключена к антенне. Альтернативно, эти балансировочные катушки можно соединять между собой (например, перемычками) до подключения к антенне. В результате взаимного соединения этих катушек получается различное число витков провода для подмножества катушек с внутренними соединениями. Избирательно подключая отдельную катушку или подмножество катушек к антенне (передатчику или приемнику), можно менять «эффективный» магнитный момент антенны и получить сбалансированную матрицу.
Антенна может представлять собой передатчик или приемник, и избирательно подключенные балансировочные катушки становятся частью передающей катушки или частью приемной катушки (главной или компенсационной катушки). «Подмножество» множества катушек определяется в данном описании как любая комбинация совокупности катушек. Например, в зависимости от требуемой балансировки, каждую из шести катушек, показанных на фиг.4, можно избирательно подключить к антенне или можно сначала создать комбинацию T1a+T2a, T1b+T2b, T1a+T3b, T1a+T2a+T3a, …, или всех катушек путем соединения их между собой, а затем подключить к антенне. В этих операциях не требуется никакого изменения положений катушек.
Согласно вариантам осуществления изобретения после намотки антенных катушек индуктивности (передатчика, главной катушки приемника и первой компенсационной катушки) измеряются взаимные связи. Теоретически, для целочисленных значений Νmain и Nbuck, можно найти Lmain и Lbuck, удовлетворяющие условию в уравнении (3), с любой степенью точности. Однако на практике сумма двух членов в левой стороне уравнения (3) будет ненулевой вследствие конечного допуска. Пусть экспериментально определенная взаимная связь равна Δexρ:
Остаточные взаимные связи можно уменьшить почти до нуля, используя индукционные катушки с выбором отводов (STIC) таким образом, чтобы NSTIC/L3 STIC=-Δexρ (или как можно ближе к -Δexp), где: NSTIC - число витков; LSTIC - разнос между передатчиком и STIC. Отсюда получаем:
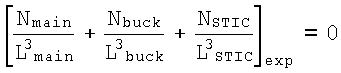 .
.
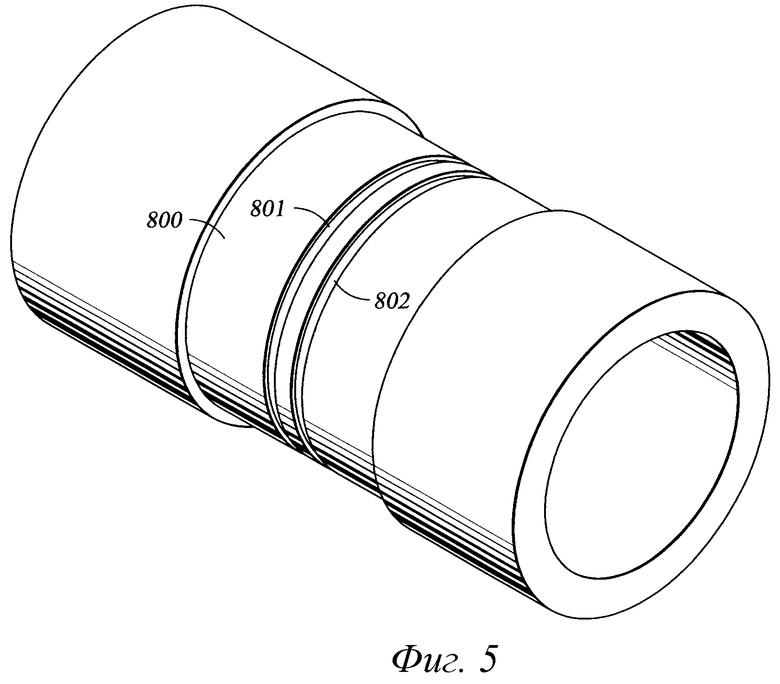
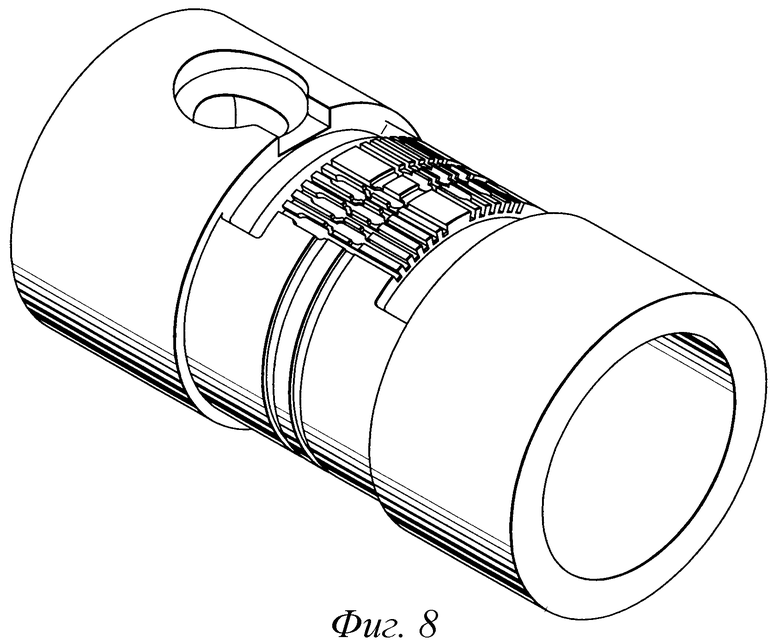
На фиг.5-12 показаны варианты воплощения STIC согласно изобретению. На основе 800 выполняют окна 801 и 802, имеющие определенные ширину, диаметр и положение, в которых нужно разместить индукционные катушки. Размеры окон обычно определяют на основании требуемых параметров передатчика и приемника. Основа 800 предпочтительно выполнена из непроводящих материалов с низким коэффициентом теплового расширения, например из композитных материалов или керамики. Конкретный композитный или керамический материал основы можно выбирать согласно его свойствам, например коэффициенту теплового расширения (CTE), механическому пределу текучести и стоимости. Предпочтительно, CTE материала основы выбирают достаточно малым, чтобы при изменении температуры в условиях ствола скважины тепловое расширение основы не оказывало существенного влияния на геометрию присоединенных к ней индукционных катушек.
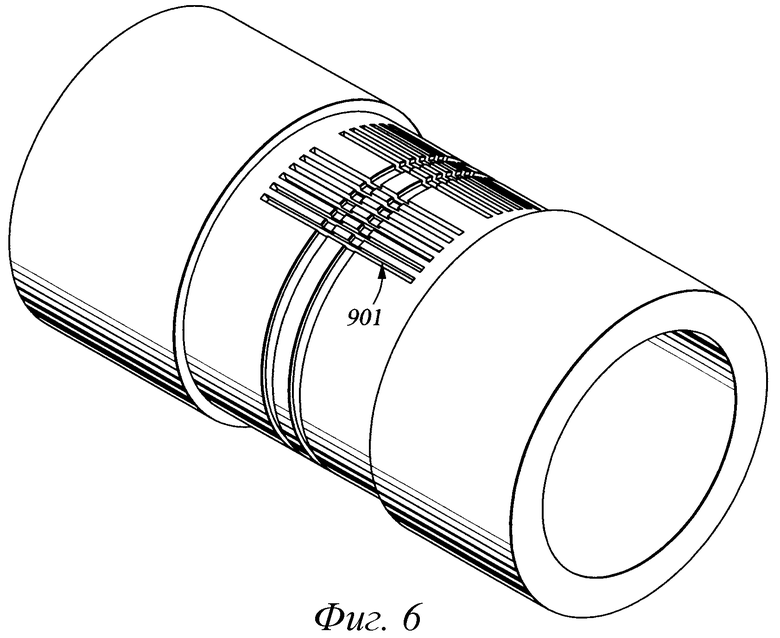
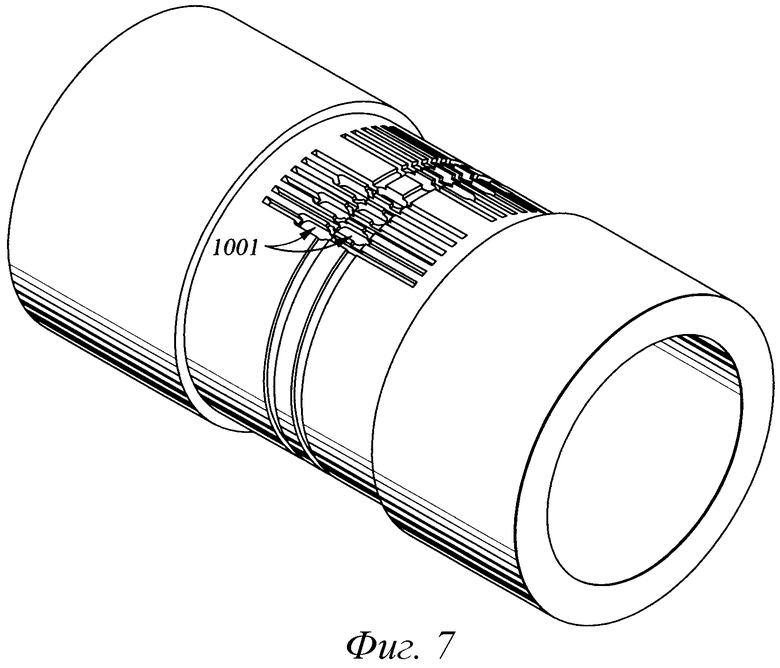
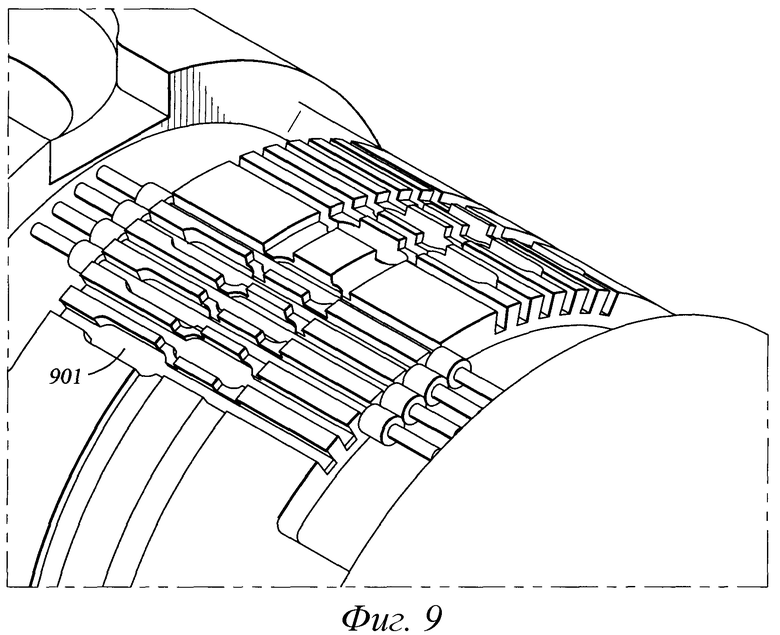
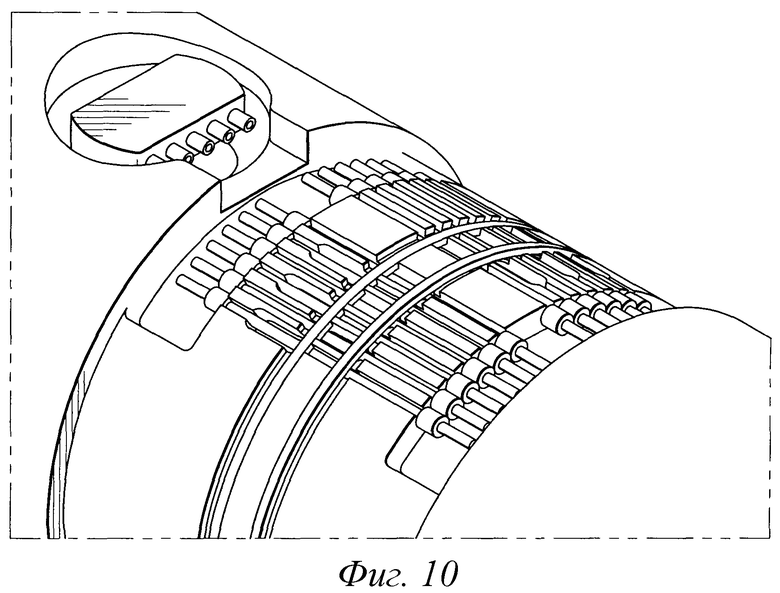
Выполняют прорезь 901 для соединительных штырей (фиг.6), после чего выполняют углубления 1001 (фиг.7) для катушек. Углубления 1001 используют как соединительные гнезда для проводов. Изготавливают другие структуры, необходимые для подключения катушки к матрице (фиг.8). Штыри можно закреплять в прорезях 901 с использованием непроводящего материала, например эпоксидной смолы (фиг.9). Каждая катушка намотана с нужным числом витков для каждого выбираемого отвода и может быть подключена к паре штырей для облегчения соединений (фиг.10). Число витков каждой катушки может определяться величиной требуемой балансировки.
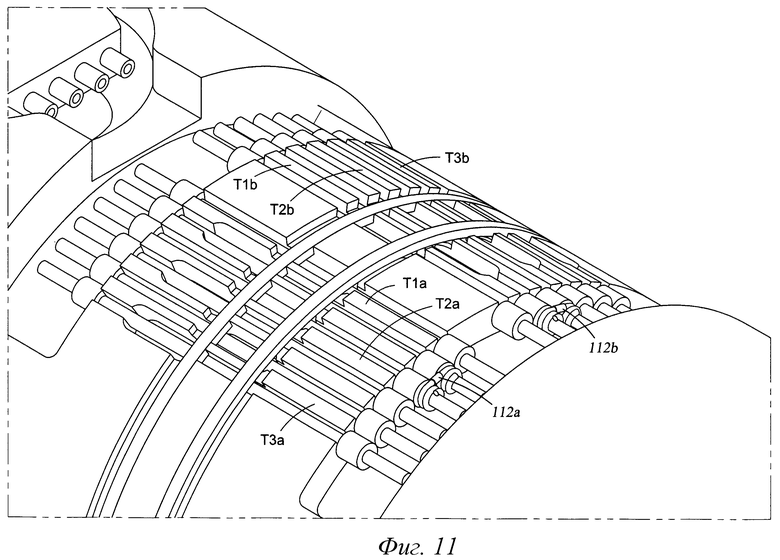
После проведения начального измерения взаимной связи (выражающейся в σX) с помощью электронно-измерительных приборов выбирают отводы, которые соединяют между собой, устанавливая соответствующие перемычки (фиг.11). Хотя в этом примере для соединения катушек используются перемычки, специалисту в данной области очевидно, что для соединения катушек можно использовать другие механизмы (например, переключатели или тумблеры) без отхода от объема изобретения. В примере, показанном на фиг.11, обмотки T1a и T2a соединены между собой последовательно с помощью перемычки 112a, и обмотки T1b и T2b соединены между собой последовательно с помощью перемычки 112b. В результате получается эффективное количество витков T1a+T2a и T1b+T2b соответственно. Схема этого конкретного соединения показана на фиг.12.
Затем выбранные и соединенные между собой обмотки T1a и T2a катушки подключаются к передающей или приемной антенне с помощью пары проводов 131a и 132a (фиг.13). Аналогично, соединенные между собой обмотки T1b и T2b катушки могут быть подключены к приемнику или передатчику. После подключения выбранных катушек к приемнику или передатчику производится еще одно измерение для проверки балансировки матрицы. Процедуру измерение-выбор-измерение можно повторять, пока не будет достигнута наилучшая балансировка или не будет выполнен выбранный критерий.
На фиг.14 показана блок-схема последовательности операций способа 1400 балансировки ЭМ прибора, который содержит множество балансировочных катушек, согласно одному варианту осуществления изобретения. Согласно способу 1400 сначала измеряют взаимную связь между передатчиком и приемником (этап 1402). Как было отмечено выше, это можно делать после изготовления прибора, с помощью электроники на приборе. Затем, на основании измерения, определяют подмножество катушек, необходимое для балансировки матрицы (этап 1404). Затем выбранное подмножество катушек подключают к передатчику или приемнику (этап 1406). Как было отмечено выше, в подмножестве катушек можно создать внутренние соединения с использованием, например, перемычек, после чего подключить к передатчику или приемнику с помощью провода. Специалисту в данной области очевидно, что для таких соединений можно использовать и другие механизмы. После этого можно произвести второе измерение взаимной связи и регулировку.
На фиг.15 показана блок-схема последовательности операций способа 1500 изготовления ЭМ прибора, который включает в себя совокупность балансировочных катушек, согласно варианту осуществления изобретения. Согласно способу 1500 наматывают на основу по меньшей мере одну антенну (этап 1502). По меньшей мере одна антенна может быть передатчиком или приемником. Специалисту в данной области очевидно, что термины «передатчик» и «приемник» используются только для упрощения описания, поскольку катушку можно использовать как передатчик или как приемник в зависимости от применения. Кроме того, основа (или секция прибора) может включать в себя только одну антенну или более одной антенны, которые образуют одну или несколько матриц (например, прибор с индукционной матрицей, AIT®, Schlumberger Technology Corporation). Если секция включает в себя только одну антенну, то для формирования матрицы можно использовать другую антенну на другой секции.
На основе размещают множество балансировочных катушек вблизи балансируемой антенны (этап 1504). Предпочтительно, чтобы балансировочные катушки размещались вблизи балансируемой антенны. Однако это не является обязательным требованием. Как отмечено выше, множество балансировочных катушек должно иметь такую конфигурацию, чтобы их можно было по отдельности подключать к антенне или соединять между собой, а затем подключать к антенне.
Затем измеряют взаимную связь между передатчиком и приемником (этап 1506). Это можно делать с помощью электроники на приборе. На основании взаимной связи выбирают подмножество катушек для балансировки. Затем подмножество катушек подключают к передающей или приемной антенне (этап 1508). При необходимости, можно снова измерить взаимную связь и произвести дополнительную регулировку катушек, чтобы уменьшить взаимную связь в соответствии с выбранным критерием. Балансировка (этапы 1506 и 1508) может осуществляться изготовителем прибора до его отгрузки или на месте перед использованием.
Настоящее изобретение имеет следующие преимущества. Варианты осуществления изобретения предусматривают удобный способ регулировки «эффективного» числа витков и/или «эффективного» положения приемной или передающей катушки. Варианты осуществления изобретения не предусматривают использования подвижных частей и требуют меньше времени для балансировки матрицы. Таким образом, прибор, отвечающий вариантам осуществления изобретения, можно изготавливать с меньшими затратами. Дополнительно, варианты осуществления изобретения можно использовать в широком спектре индукционных приборов, включая проводные, LWD, MWD или LWT приборы.
Изобретение относится к устройствам для электромагнитного каротажа скважин. Сущность: электромагнитный каротажный прибор содержит основу, которую можно разместить в скважине, по меньшей мере одну антенну передатчика и приемника, установленную на основе, и множество балансировочных катушек, установленных на основе в непосредственной близости от антенны передатчика или приемника. Множество балансировочных катушек предназначено для избирательного подключения к по меньшей мере одной антенне. Способ балансировки заключаются в измерении взаимной связи между антенной передатчика и антенной приемника на электромагнитном каротажном приборе и избирательном подключении подмножества множества балансировочных катушек к антенне передатчика или приемника на основании измеренной взаимной связи. Технический результат: удобство регулирования эффективного числа витков приемной или передающей катушки без использования подвижных частей, сокращение времени балансировки. 3 н. и 8 з.п. ф-лы, 15 ил.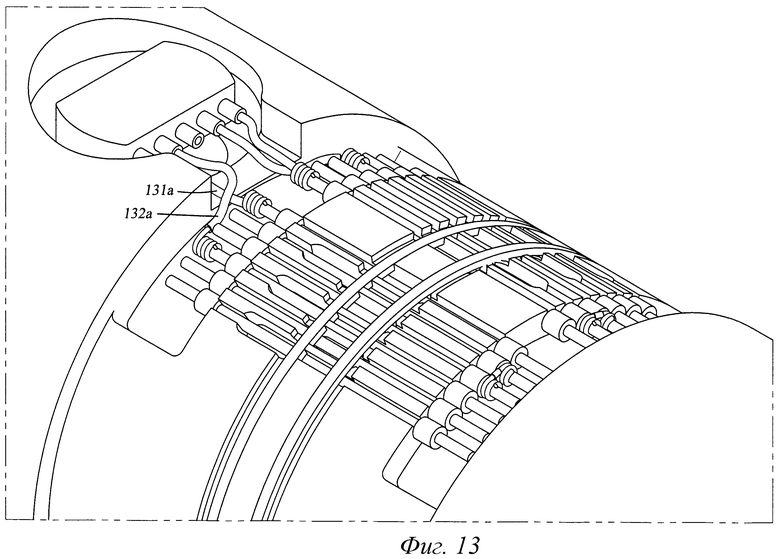
1. Электромагнитный каротажный прибор (30), содержащий
основу, предназначенную для размещения в скважине,
по меньшей мере одну антенну (312) передатчика и по меньшей мере одну антенну приемника (313), установленные на основе,
отличающийся тем, что содержит множество индукционных балансировочных катушек (710, 720), установленных на основе в непосредственной близости по меньшей мере от одной антенны передатчика или по меньшей мере от одной антенны приемника, причем множество индукционных балансировочных катушек предназначено для избирательного подключения к по меньшей мере одной антенне передатчика или по меньшей мере одной антенне приемника.
2. Электромагнитный каротажный прибор по п.1, отличающийся тем, что основа выполнена из непроводящего материала.
3. Электромагнитный каротажный прибор по п.1, отличающийся тем, что элемент основы выполнен из по меньшей мере одного материала, выбранного из группы, состоящей из керамического материала и композитного материала.
4. Электромагнитный каротажный прибор по п.1, отличающийся тем, что множество индукционных балансировочных катушек укреплено на основе с использованием непроводящего материала.
5. Электромагнитный каротажный прибор по п.1, отличающийся тем, что множество индукционных балансировочных катушек предназначено для соединения между собой с помощью перемычек.
6. Способ балансировки индукционной антенной системы на электромагнитном каротажном приборе (30), заключающийся в том, что измеряют взаимную связь между по меньшей мере одной антенной (312) передатчика и по меньшей мере одной антенной (313) приемника на электромагнитном каротажном приборе,
отличающийся тем, что
избирательно подключают подмножество множества балансировочных катушек (710, 720) на электромагнитном каротажном приборе к по меньшей мере одной антенне передатчика или меньшей мере одной антенне приемника на основании измеренной взаимной связи.
7. Способ по п.6, отличающийся тем, что
осуществляют второе измерение взаимной связи между по меньшей мере одной антенной (312) передатчика и по меньшей мере одной антенной (313) приемника после избирательного подключения подмножества множества балансировочных катушек,
подключают к по меньшей мере одной антенне передатчика или по меньшей мере одной антенне приемника другое подмножество множества балансировочных катушек, если второе измерение взаимной связи больше выбранного критерия.
8. Способ изготовления электромагнитного каротажного прибора (30), заключающийся в том, что
выполняют окно обмотки (801, 802) на основе (800),
размещают по меньшей мере одну антенну (312) передатчика и по меньшей мере одну антенну (313) приемника в окне обмотки,
выполняют множество прорезей (901) на основе для размещения множества соединительных штырей,
выполняют углубления (1001) для размещения балансировочных катушек, размещают множество балансировочных катушек в множестве углублений, причем множество балансировочных катушек предназначено для избирательного подключения к по меньшей мере одной антенне (312) передатчика или по меньшей мере одной антенне (313) приемника.
9. Способ по п.8, отличающийся тем, что основу выполняют из по меньшей мере одного непроводящего материала, выбранного из группы, состоящей из керамического материала и композитного материала.
10. Способ по п.8, отличающийся тем, что подмножество множества балансировочных катушек предназначено для избирательного подключения к по меньшей мере одной антенне в окне обмотки на основании измеренной взаимной связи между антеннами.
11. Способ по п.10, отличающийся тем, что для избирательного подключения подмножества множества балансировочных катушек используют одну или несколько перемычек.
| Зонд индукционного каротажа | 1991 |
|
SU1809407A1 |
| Устройство для индукционного каротажа | 1981 |
|
SU1004941A1 |
| Индукционный преобразователь | 1986 |
|
SU1377803A1 |
| US 5065099 А, 12.11.1991 | |||
| US 6734675 В2, 11.05.2004 | |||
| US 6690170 В2, 10.02.2004. | |||

