Область техники, к которой относится изобретение
Данное изобретение, в целом, относится к области электрического каротажа. В частности, изобретение относится к способам определения ошибок зонда в приборах на основе электромагнитной индукции или распространения.
Предшествующий уровень техники
Приборы на основе электромагнитной (ЭМ) индукции и распространения использовались в течение многих лет для измерения удельного сопротивления пластов, окружающих ствол скважины. ЭМ каротажные приборы измеряют удельное сопротивление (или, напротив, электропроводность) пласта путем наведения вихревых токов в пластах в соответствии с сигналом передатчика переменного тока. Вихревые токи индуцируют вторичные магнитные поля, которые, в свою очередь, индуцируют напряжения в антеннах приемника. Поскольку величины вихревых токов зависят от значений электропроводности пласта, величины принятых сигналов отражают значения электропроводности пласта.
В идеале, каротажный прибор на основе индукции или распространения должен показывать нуль в среде с нулевой электропроводностью. Однако ЭМ каротажные приборы содержат проводящие материалы (например, проводку зонда, квадраксы, распределительные блоки, электроды для сферических каротажных диаграмм с фокусировкой тока, установленные на индукционном зонде, и т.д.), которые могут реагировать на магнитное поле, генерируемое передатчиком. Наведенные вихревые токи в этих металлических деталях создают постоянный сигнал на приемниках. Поэтому прибор на основе индукции или распространения не будет показывать нуль в среде с нулевой электропроводностью. Этот автосигнал называется ошибкой зонда. В принципе, ошибку зонда можно определить, подвесив прибор в свободном пространстве вдали от любого внешнего проводящего материала. Однако большинство приборов на основе индукции или распространения предназначено для измерения в глубине пласта (т.е. на большой глубине исследования), для определения удельного сопротивления пласта за пределами зоны проникновения. Для этих приборов “глубинного считывания” определение ошибок зонда в свободном пространстве непрактично. По этой причине способ коррекции ошибки зонда раскрыт в патенте США №4800496, выданном Барберу (Barber) и др. (в “патенте Барбера”) и переуступленном правообладателю настоящего изобретения. Этот патент включен в данное описание посредством ссылки во всей полноте.
Способы, раскрытые в патенте Барбера, обеспечивают коррекцию ошибки зонда для традиционных индукционных приборов за счет выполнения измерений на двух разных расстояниях от поверхности земли. Затем алгоритм соотносит разность напряжений на двух высотах с сигналом земли. Наконец, сигнал земли вычитают из показания зонда, чтобы получить истинную ошибку зонда. Затем истинную ошибку зонда можно использовать для коррекции каротажных измерений.
В традиционных индукционных каротажных приборах, например описанных выше, передатчики и приемники расположены так, что их магнитные моменты выровнены с продольной осью прибора. Эти приборы на основе продольных индукционных массивов наводят вихревые токи в петлях, перпендикулярных продольной оси прибора. Традиционный индукционный прибор не может обеспечивать точные оценки удельного сопротивления в пластах с анизотропией. Анизотропия пласта обусловлена тем, каким образом происходило осаждение слоев пласта в природных условиях. Пласты, содержащие углеводороды, часто проявляют анизотропию удельного сопротивления пласта. В таких пластах горизонтальная электропроводность, σh (или удельное сопротивление, Rh) в направлении, параллельном плоскости залегания, отличается от вертикальной электропроводности, σv (или удельного сопротивления, Rv) в направлении, перпендикулярном плоскости залегания.
Для измерения электропроводности пласта с анизотропией новые приборы на основе ЭМ индукции или распространения обычно содержат поперечные массивы, которые имеют передающие и/или приемные антенны, расположенные так, что их магнитные моменты, по существу, перпендикулярны оси прибора. См., например, Моран (Moran) и Гианцеро (Gianzero), "Effects of Formation Anisotropy on Resistivity Logging Measurements" (Влияние анизотропии пласта на каротажные измерения удельного сопротивления), Geophysics, 44, 1266-1286 (1979). Приборы с поперечными индукционными массивами включают в себя приборы с трехосными массивами. Каждый трехосный массив в этом приборе содержит три ортогональные передающие катушки и три ортогональные приемные катушки с теми же ортогональными ориентациями. В ходе работы трехосный передатчик заряжается энергией в трех ортогональных направлениях. Отдельные приемные катушки выровнены в тех же трех ортогональных направлениях, поэтому измеряют напряжения, индуцированные вихревыми токами, текущими в окружающих пластах. Примеры трехосных приборов можно найти, например, в патенте США №3510757, выданном Хастону (Huston), №5781436, выданном Форгангу (Forgang) и др., №3609521, выданном Десбрандесу (Desbrandes), №4360777, выданном Сегесману (Segesman), и №6553314, выданном Крайгсхаусеру (Kriegshäuser) и др.
В отличие от традиционного индукционного прибора, который наводит вихревые токи, текущие в плоскостях, перпендикулярных продольной оси прибора, поперечный массив наводит вихревые токи, текущие в плоскостях, параллельных продольной оси прибора. Трехосный массив имеет передатчик и приемник, каждый из которых имеет три катушки, размещенных в ортогональных направлениях. Поэтому в трехосном массиве имеются девять связей между передатчиком и приемником. Каждая связь чувствительна к разным направлениям течения вихревых токов. Кроме того, каждый прибор на основе ЭМ индукции или распространения обычно содержит несколько массивов. Соответственно калибровка ошибки зонда для ЭМ приборов, имеющих поперечные или трехосные массивы, сложнее, чем для традиционного индукционного прибора, и желательно иметь способы калибровки ошибок зонда для ЭМ прибора, имеющего поперечные или трехосные массивы.
Сущность изобретения
Согласно одному аспекту варианты осуществления изобретения относятся к способам определения ошибки зонда в каротажном приборе, содержащем поперечный массив. Согласно одному варианту осуществления способ определения ошибки зона в каротажном приборе, содержащем поперечный массив, включает в себя получение первого измерения с использованием поперечного массива, когда каротажный прибор находится на первой высоте над землей в выбранной ориентации; получение второго измерения с использованием поперечного массива, когда каротажный прибор находится на второй высоте над землей в выбранной ориентации; вывод разностного измерения из первого измерения и второго измерения; определение фонового сигнала с использованием разностного измерения и заранее заданной функции, причем заранее заданная функция связывает сигналы земли в совокупности сигналов, полученных на второй высоте, с совокупностью разностных сигналов между сигналами, полученными на первой высоте и второй высоте, при совокупности значений электропроводности пласта; и определение ошибки зонда путем вычитания фонового сигнала из второго измерения.
Согласно одному аспекту варианты осуществления изобретения относятся к способам определения ошибки зонда в каротажном приборе, содержащем трехосный массив. Согласно одному варианту осуществления изобретения способ определения ошибки зонда в каротажном приборе, содержащем трехосный массив, включает в себя получение первого измерения для, по меньшей мере, одной связи трехосного массива, когда каротажный прибор находится на первой высоте над землей в выбранной ориентации; получение второго измерения для упомянутой, по меньшей мере, одной связи трехосного массива, когда каротажный прибор находится на второй высоте над землей в выбранной ориентации; вывод разностного измерения из первого измерения и второго измерения для упомянутой, по меньшей мере, одной связи трехосного массива; определение фонового сигнала с использованием разностного измерения и заранее заданной функции для упомянутой, по меньшей мере, одной связи трехосного массива, причем заранее заданная функция связывает сигналы земли в совокупности сигналов, полученных на второй высоте, с совокупностью разностных сигналов между сигналами, полученными на первой высоте и второй высоте, при совокупности значений электропроводности пласта; и определение ошибки зонда путем вычитания фонового сигнала из второго измерения для упомянутой, по меньшей мере, одной связи трехосного массива.
Согласно одному аспекту варианты осуществления изобретения относятся к системам для определения ошибки зонда в каротажном приборе, содержащем поперечный массив. Согласно одному варианту осуществления изобретения система для определения ошибки зонда в каротажном приборе, имеющем поперечный массив, содержит память, в которой хранится программа, содержащая команды для получения первого измерения с использованием поперечного массива, когда каротажный прибор находится на первой высоте от поверхности земли в выбранной ориентации; получения второго измерения с использованием поперечного массива, когда каротажный прибор находится на второй высоте от поверхности земли в выбранной ориентации; вывода разностного измерения из первого измерения и второго измерения; определения фонового сигнала с использованием разностного измерения и заранее заданной функции, причем заранее заданная функция связывает сигналы земли в совокупности сигналов, полученных на второй высоте, с совокупностью разностных сигналов между сигналами, полученными на первой высоте и второй высоте при совокупности значений электропроводности пласта; и определения ошибки зонда путем вычитания фонового сигнала из второго измерения.
Согласно одному аспекту варианты осуществления изобретения относятся к системе для определения ошибки зонда в каротажном приборе, содержащем трехосный массив. Согласно одному варианту осуществления изобретения система для определения ошибки зонда в каротажном приборе, имеющем трехосный массив, содержит память, в которой хранится программа, содержащая команды для получения первого измерения для, по меньшей мере, одной связи трехосного массива, когда каротажный прибор находится на первой высоте от поверхности земли в выбранной ориентации; получения второго измерения для упомянутой, по меньшей мере, одной связи трехосного массива, когда каротажный прибор находится на второй высоте от поверхности земли в выбранной ориентации; вывода разностного измерения из первого измерения и второго измерения для упомянутой, по меньшей мере, одной связи трехосного массива; определения фонового сигнала с использованием разностного измерения и заранее заданной функции для упомянутой, по меньшей мере, одной связи трехосного массива, причем заранее заданная функция связывает сигналы земли в совокупности сигналов, полученных на второй высоте, с совокупностью разностных сигналов между сигналами, полученными на первой высоте и второй высоте, при совокупности значений электропроводности пласта; и определения ошибки зонда путем вычитания фонового сигнала из второго измерения для упомянутой, по меньшей мере, одной связи трехосного массива.
Другие аспекты и преимущества изобретения явствуют из нижеследующего описания и прилагаемой формулы изобретения.
Перечень чертежей
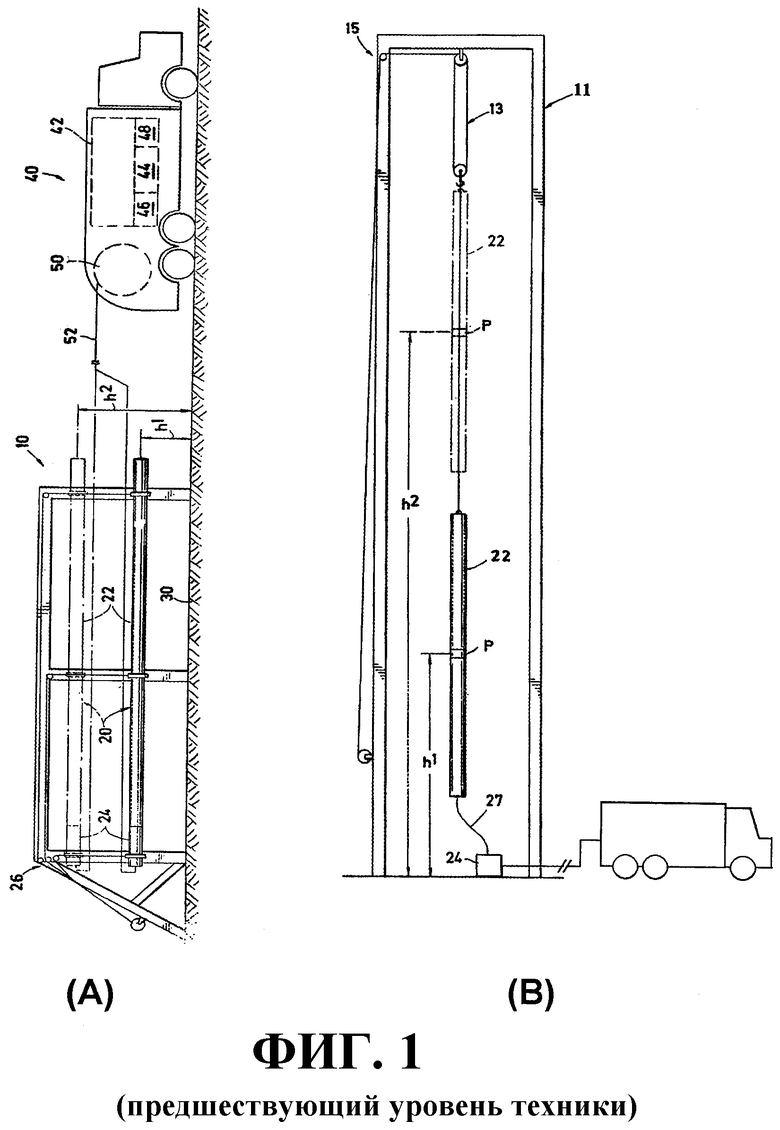
Фиг.1А и 1В - соответствующие предшествующему уровню техники установки для горизонтальной и вертикальной калибровки ошибки зонда соответственно.
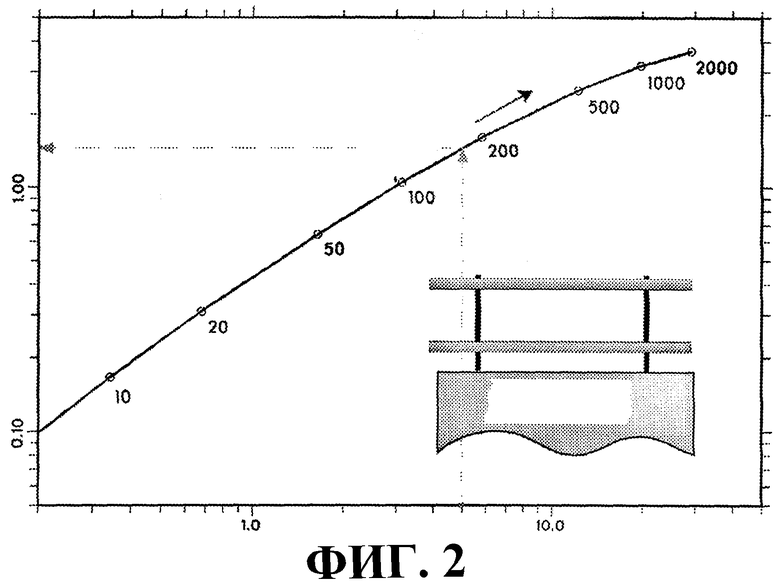
Фиг.2 - график зависимости сигналов земли как функции разностных измерений на двух высотах для известного индукционного прибора.
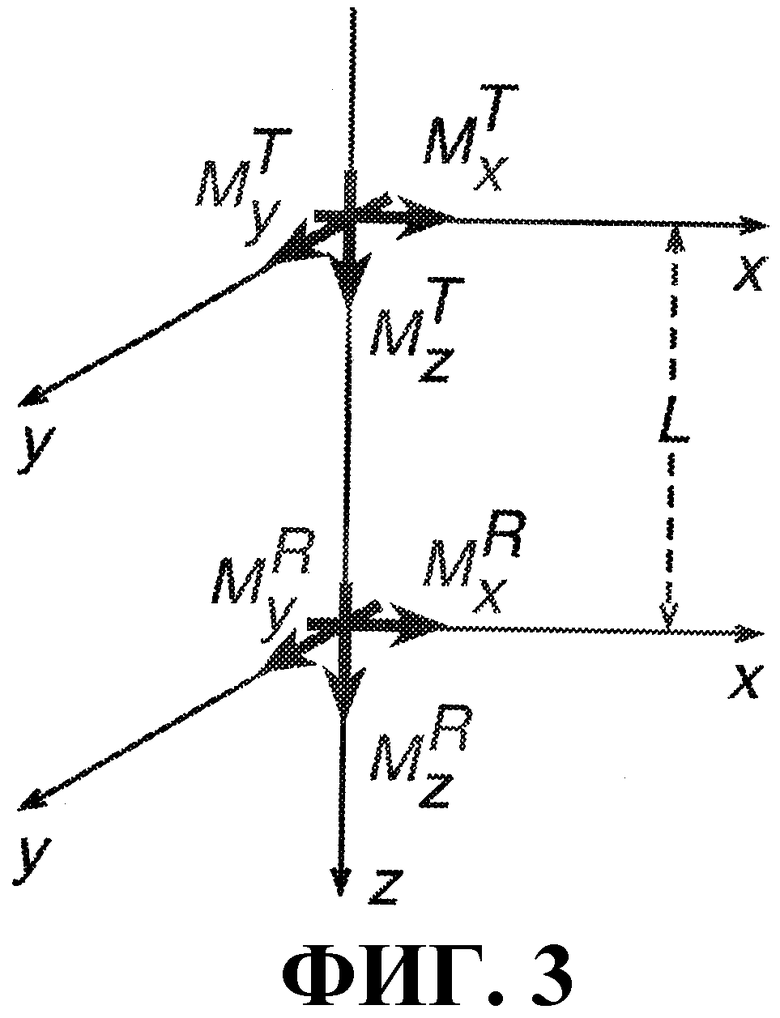
Фиг.3 - схема трехосного массива, где показаны магнитные моменты каждой катушки.
Фиг.4 - установка для калибровки ошибки зонда согласно одному варианту осуществления изобретения.
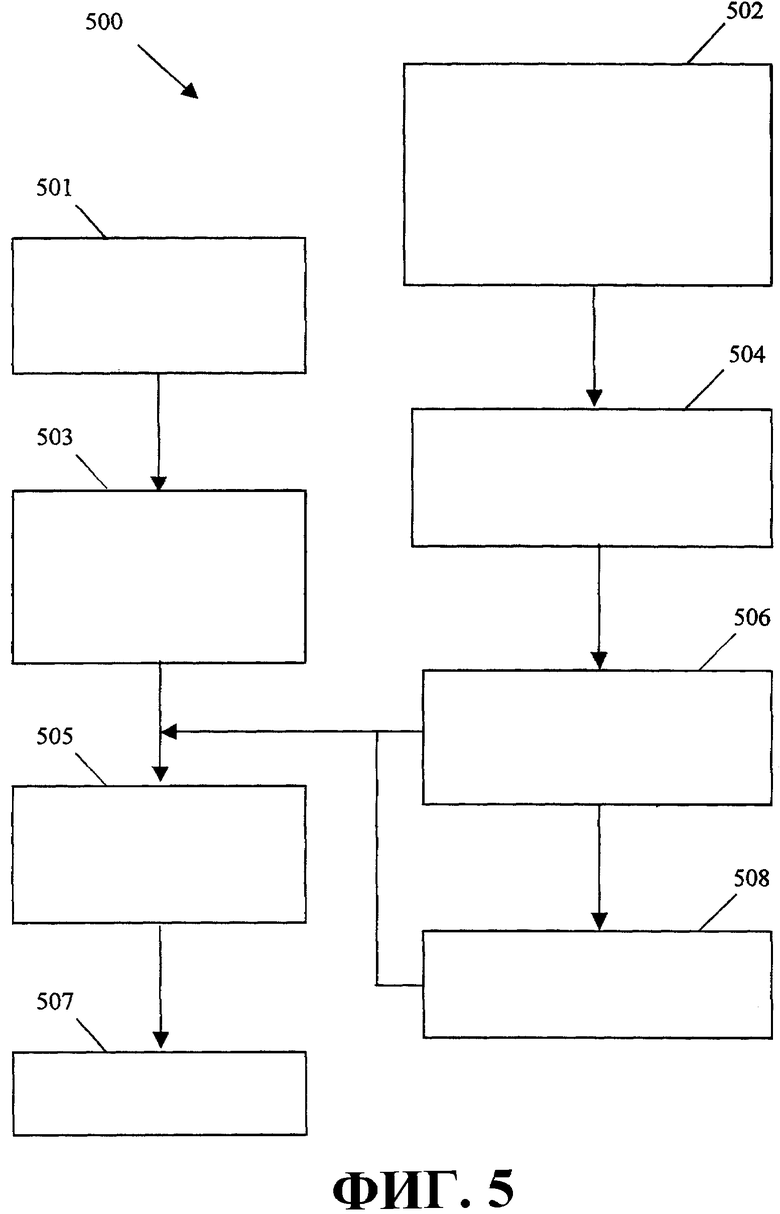
Фиг.5 - способ коррекции ошибки зонда согласно одному варианту осуществления изобретения.
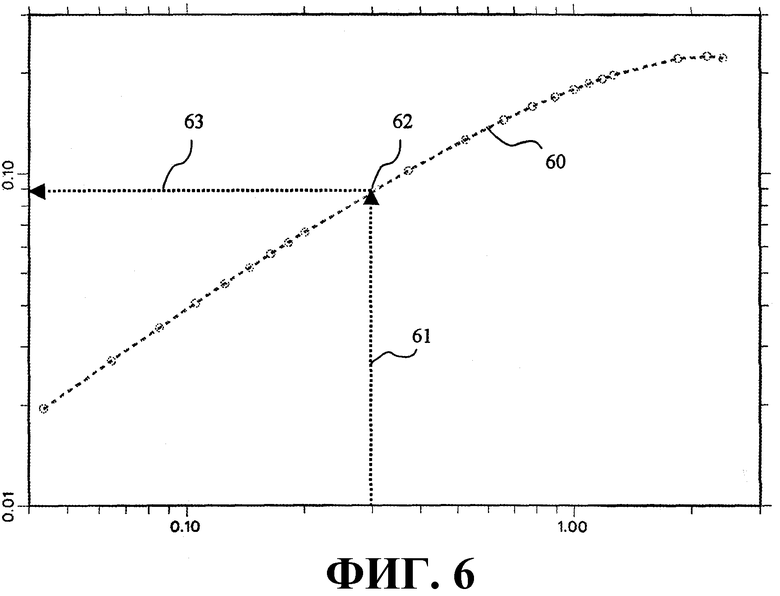
Фиг.6 - график зависимости сигналов земли в связи zz трехосного массива как функции разностных измерений на двух высотах согласно одному варианту осуществления изобретения.
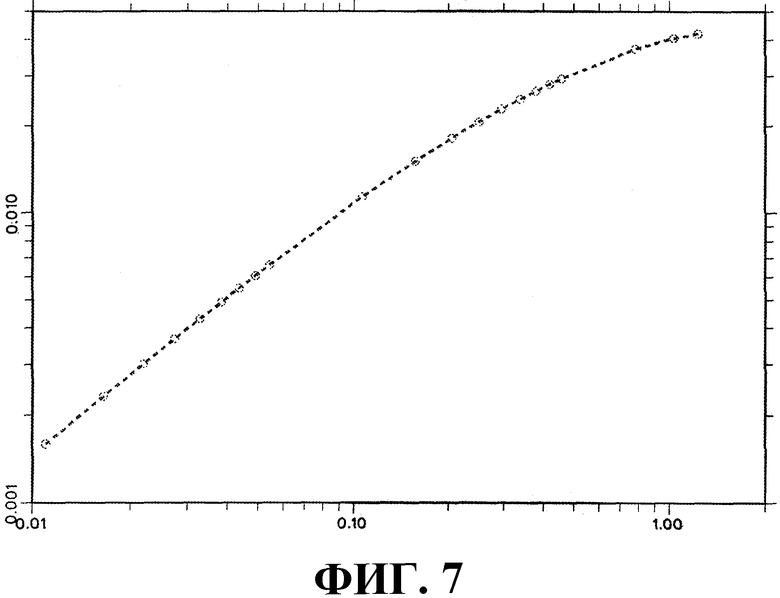
Фиг.7 - график зависимости сигналов земли в связи zx трехосного массива как функции разностных измерений на двух высотах согласно одному варианту осуществления изобретения.
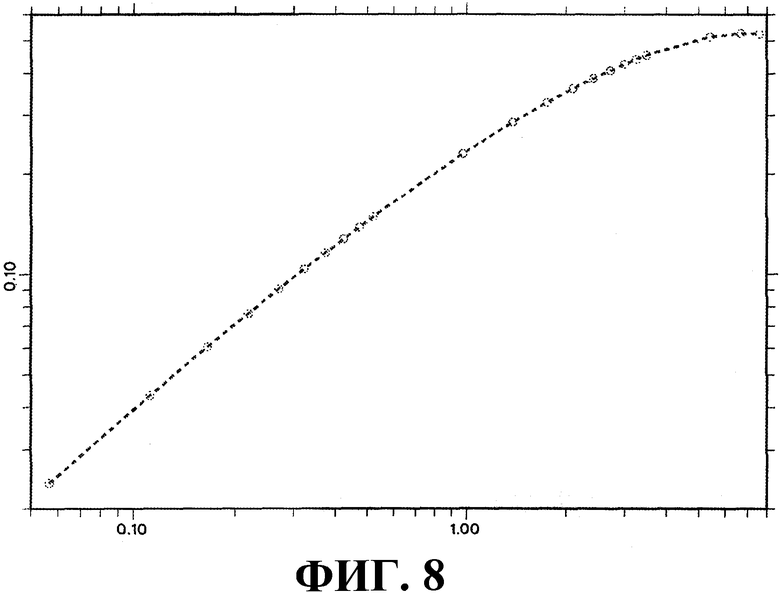
Фиг.8 - график зависимости сигналов земли в связи yy трехосного массива как функции разностных измерений на двух высотах согласно одному варианту осуществления изобретения.
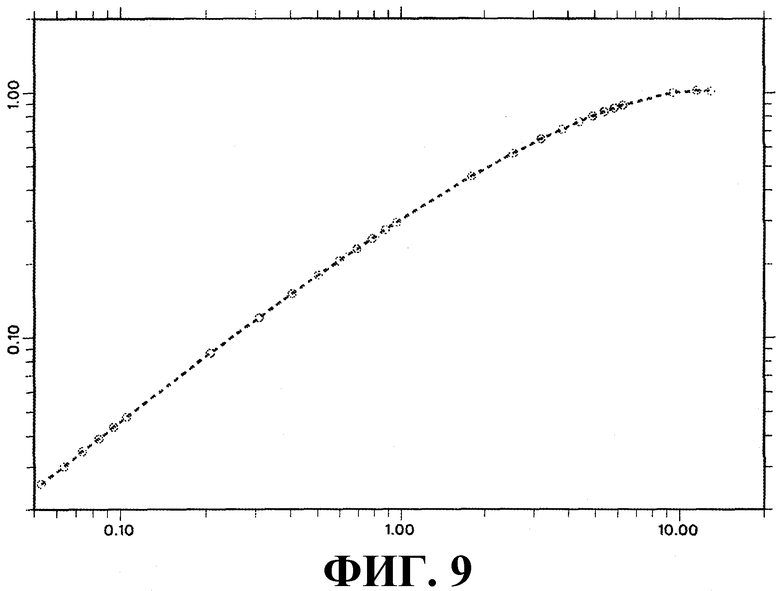
Фиг.9 - график зависимости сигналов земли в связи xx трехосного массива как функции разностных измерений на двух высотах согласно одному варианту осуществления изобретения.
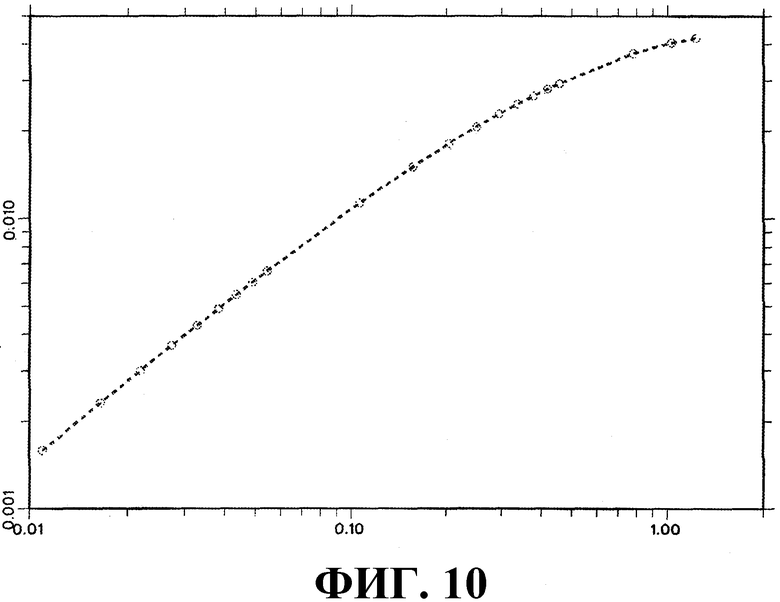
Фиг.10 - график зависимости сигналов земли в связи xz трехосного массива как функции разностных измерений на двух высотах согласно одному варианту осуществления изобретения.
Подробное описание
Варианты осуществления настоящего изобретения относятся к способам определения сигнала земли в приборе на основе индукции или распространения с поперечными или трехосными массивами, согласно которым ошибку зонда (или автосигнал) в приборе можно точно определить, как если бы прибор находился в свободном пространстве. Способ предусматривает измерение сигналов от всех связей в поперечных или трехосных массивах на двух расстояниях от поверхности земли и использование алгоритма, связывающего измерения на двух расстояниях с сигналом земли.
На фиг.1А показана горизонтальная или “параллельная” установка 10 ошибки зонда, а на фиг.1В показана “вертикальная” установка ошибки зонда, которые раскрыты в патенте Барбера. Такие же или аналогичные установки можно использовать согласно вариантам осуществления настоящего изобретения. Специалисту в данной области техники очевидно, что, хотя “вертикальная” или “горизонтальная” установка предпочтительна, возможны варианты осуществления изобретения, предусматривающие использование других установок. Согласно фиг.1А установка 10 ошибки зонда позволяет располагать каротажный прибор 20 на основе индукции или распространения, по существу, горизонтально к земле 30. Установка 10 ошибки зонда, предпочтительно, имеет минимальное количество металла или проводящего материала. Например, ее можно построить из деревянных столбов и деревянных шпилек. Для переноса прибора 20, каротажного зонда 22 и картриджа 24 на первую высоту h1, а затем на высоту h2 и наоборот используется система 26 шкивов и веревок. Картридж 24 включает в себя, для простоты иллюстрации, как электронный картридж, так и телеметрический картридж обычного каротажного прибора на основе индукции или распространения. Вблизи установки 10 ошибки зонда обеспечен мобильный блок 40 измерения и контроля. Измерительный блок 42, содержащий блок 44 обработки, источник питания 46 и записывающее устройство 48, обеспечен в качестве стандартного оборудования скважинного каротажа. Каротажный кабель 52 соединяет каротажный прибор 20 на основе индукции или распространения через каротажную лебедку 50 с измерительным блоком 40.
Согласно способам, раскрытым в патенте Барбера, характеристики зонда измеряются на двух высотах. Разность показаний зонда на двух высотах является функцией сигнала земли. На фиг.2 показан корреляционный график, связывающий разность напряжений на двух высотах с сигналом земли для общеизвестного прибора на основе индукции или распространения. Кривая линия является графиком зависимости сигнала земли на верхнем уровне (12 футов) от разности измерений (δσ) на верхнем (12 футов) и нижнем (4 фута) уровнях. Используя этот график и разность между измерениями на двух высотах, можно определить сигнал земли (σe) в верхнем положении. Затем сигнал земли (σe) можно вычесть из показания зонда в верхнем положении (например, 12 футов), чтобы вывести собственное показание зонда (ошибку зонда). Затем ошибку зонда можно использовать для коррекции каротажных измерений.
Хотя вышеописанный способ некоторое время использовали для общеизвестных индукционных каротажных приборов, прибор с поперечными массивами (например, трехосными массивами) будет создавать другие картины вихревых токов. Например, поперечный передатчик будет наводить вихревые токи, текущие в плоскостях, параллельных продольной оси прибора. Напротив, известная продольная магнитодипольная антенна наводит вихревые токи в петлях, перпендикулярных продольной оси прибора. Трехосный массив содержит передатчик и приемник, каждый из которых имеет три катушки, обычно установленные в ортогональных направлениях. Это значит, что трехосный массив, помимо стандартных катушек, ориентированных по оси z, имеет дополнительные, находящиеся в том же месте, катушки, ориентированные в ортогональных направлениях (т.е. поперечные катушки).
На фиг.3 схематически показан типичный трехосный массив. Три катушки передатчика имеют магнитные моменты, выровненные в направлениях x, y и z, т.е. MT x, MT y и MT z. Приемник имеет три катушки, выровненные в тех же ортогональных направлениях и поэтому имеющие магнитные моменты MR x, MR y, и MR z. В ходе работы каждую из катушек передатчика можно заряжать энергией и регистрировать сигналы с помощью каждой из катушек приемника. Поэтому для каждого трехосного массива имеется 9 возможных измерений. Прибор на основе ЭМ индукции или распространения обычно содержит множество трехосных массивов. Таким образом, коррекция ошибки зонда для прибора на основе ЭМ индукции или распространения, имеющего множество трехосных массивов, значительно более сложна, чем для известного индукционного прибора.
В трехосном массиве измеренные 9 компонентов (связей) можно представить как
Каждый элемент этой матрицы представляет связь (ab) от передатчика а к приемнику b, например, yx обозначает связь от передатчика y к приемнику х.
Для калибровки ошибки зонда трехосного массива нужно задать направления катушек передатчика и приемника. На фиг.4 изображена установка для калибровки трехосного массива, аналогичная установке для калибровки ошибки зонда, показанной на фиг.1А. Показано, что трехосный прибор установлен на подъемной станции, причем ось х направлена вниз, а ось y направлена параллельно границе раздела воздух-земля. В этом одном положении все ошибки зонда можно вычислить без затруднений, связанных с поворотом прибора на подъемной станции. В установке, показанной на фиг.4, сигналы связей xy, yx, yz и zy должны быть равны нулю, и показания прибора для этих связей на высоте 12 футов можно использовать как приближенные ошибки зонда, подлежащие вычитанию из соответствующих каротажных измерений.
Специалисту в данной области техники очевидно, что установка, показанная на фиг.4, носит исключительно иллюстративный характер, и что можно использовать другие варианты, не выходя за рамки объема изобретения. Например, высоты двух положений могут отличаться от указанных 4 футов и 12 футов. Кроме того, ось y может быть направлена к земле, а ось х может быть параллельна границе раздела воздух-поверхность. В этой альтернативной установке сигналы связей xy, yx, xz и zx должны быть равны нулю, и показания прибора на высоте 12 футов являются приблизительными ошибками зонда, подлежащими вычитанию из соответствующих каротажных измерений. Можно также производить два измерения на каждой высоте, одно - при оси x, направленной вниз, и одно - при оси y, направленной вниз. В этом случае приблизительные ошибки зонда можно получить из показаний зонда для связей xy, yx, yz, zy, xz и zx. Таким образом, нужно калибровать только три связи (xx, yy и zz). Кроме того, хотя и не предпочтительно, ось х и ось y могут быть отклонены от направлений вниз и параллельно поверхности земли. В этом случае сигналы связей xy, yx, yz, zy, xz и zx не будут равны нулю, и для этих связей нужно будет вычислять ошибки зонда, как и для других связей.
Хотя в установке, показанной на фиг.4, прибор установлен в направлении, параллельном поверхности земли (т.е. в горизонтальном режиме), калибровку также можно осуществлять, когда прибор подвешен в вертикальном режиме на двух высотах, как показано на фиг.1В. В вертикальном режиме ось z перпендикулярна поверхности раздела воздух-земля, а ось х и ось y параллельны границе раздела воздух-земля в вертикальном режиме. Таким образом, в вертикальной установке связи для xy и yx должны давать нуль.
На фиг.5 показана логическая блок-схема способа 500 для вычисления ошибки зонда для любой связи трехосного массива. Способ 500 иллюстрирует этапы, предусмотренные при определении истинной ошибки зонда в каждой связи, т.е. xx, xy, yz и т.д. Во-первых, сигналы (измерения) моделируют для конкретного прибора в верхнем и нижнем положениях с использованием прямой модели слоистых пластов. Модель учитывает, помимо прочих факторов, конфигурацию прибора (например, промежуток между массивами), рабочую частоту и конфигурацию установки. Подходящий код для такого моделирования раскрыт, например, в статье Андерсона (Anderson) и др., "The Response of Induction Tools to Dipping Anisotropic Formations" (Реакция индукционных приборов на наклонные анизотропные пласты), протоколы 36-го ежегодного симпозиума по каротажу SPWLA, Париж, Франция, 26-29 июня 1995 г., статья D. Код, описанный в этой статье, позволяет моделировать реакцию в одномерной среде TI с горизонтальными слоями любого катушечного каротажного прибора, включая индукционный прибор и прибор на основе распространения. Тензорные функции Грина представляют в виде спектральных интегралов и разлагают на радиально-азимутальную волну и осевую плоскую волну. Это разложение сводит трехмерное интегрирование к одномерному интегрированию, где радиально-азимутальное решение является общим для всей системы. Пропускание и отражение осевой плоской волны на границе раздела используется для описания ЭМ волны в слоистой среде. Граничные условия импеданса на границах слоев используются для определения коэффициентов отражения и коэффициентов пропускания в рекурсивном формате. Контур одномерного интегрирования по номеру радиальной волны тщательно выбирают, чтобы гарантировать точность. Для обеспечения нескольких измерений (этап 502) измерения моделируют в диапазоне значений электропроводности пласта.
Сигнал можно раздельно моделировать для действительных (R) составляющих и квадратурных (Х) составляющих. В случае Х-составляющих несбалансированная взаимная связь от передатчика также является главным вкладчиком в ошибку зонда. Затем сигналы R и X можно по отдельности использовать в дальнейшем процессе.
В отличие от известных индукционных приборов измерения, которые обычно выражают значения электропроводности, необработанные данные трехосных массивов будут выражены в единицах импеданса (то есть импеданса между передатчиком и приемником через связь с землей). Единицы импеданса сохраняют тензорные характеристики, необходимые для простых матриц поворота, подлежащих использованию при преобразовании координат (из системы координат прибора к системе координат земли и наоборот). Соответственно ошибки зонда предпочтительно вычислять и подгонять как импедансы. Для получения разумных единиц для вычисления с плавающей точкой единицами импеданса, предпочтительно, должны быть микроомы.
Затем вычисляют разностные измерения (δ), вычитая верхние сигналы (U) из соответствующих нижних сигналов (L) для каждого значения электропроводности пласта (этап 504), т.е. δ=L-U.
Заметим, что каждый из верхнего (U) и нижнего (L) сигналов (измерений) включает в себя вклад (сигнал) истинной ошибки зонда (ИОЗ, TSE) и вклад (сигнал) электропроводности земли (σe). Например, верхнее (U) и нижнее (L) измерения можно представить как

и 
где ZU и ZL представляют сигналы, обусловленные электропроводностью земли в верхнем и нижнем измерениях соответственно. Соответственно разность (δ) можно представить как

Из уравнения (4) видно, что разностный сигнал (δ) является функцией электропроводности земли (σe), поскольку фоновые сигналы земли, ZU и ZL, являются функциями электропроводности земли (σe).
Из уравнения (2) следует, что верхнее измерение (U) включает в себя сигнал (Zu), обусловленный электропроводностью земли. Поэтому верхнее измерение также является функцией электропроводности земли (σe). Поскольку разностные измерения (δ) и верхние измерения (U) зависят от электропроводности земли (σe), между ними существует соотношение. Таким образом, на следующем этапе выводят их корреляционную функцию (этап 506). Ниже проиллюстрирован один способ вывода этой корреляционной функции.
Соотношение, существующее между разностными измерениями (δ) и верхними измерениями (U), лучше задавать через натуральные логарифмы этих измерений, поскольку сигналы, принятые приемниками, экспоненциально зависят от электропроводности. Например, это соотношение можно задать как ln[abs(U)]=f{ln[abs(δ)]}, где abs(δ) и abs(U) представляют абсолютные значения разностных сигналов (δ) и верхних измерений соответственно. Абсолютные значения используются потому, что большинство связей дают отрицательные значения импеданса. Необязательно определять точный вид функции f. Вместо этого функцию f можно аппроксимировать полиномиальной функцией Р, которую можно задать как

для всех связей за исключением связи xz, которая является положительной. Для связи xz

Полиномиальные коэффициенты a0, a1, …, an зависят от характеристик конфигурации прибора (например, промежутков между массивами), составляющей импеданса, подлежащей оценке (сигналов R или X) и частоты измерения. Эти коэффициенты можно задать путем среднеквадратического приближения ln[abs(δ)] к ln[abs(U)]. Хотя вышеизложенные приемы применяются, для примера, к верхним (U) измерениям, специалисту в данной области очевидно, что в этом процессе также можно использовать нижние (L) измерения.
После того как определена корреляционная функция, т.е. коэффициенты соотношения найдены из среднеквадратичного приближения, можно вычислить (на этапе 508) вклад фонового сигнала земли в измерение верхнего сигнала при каждом значении электропроводности земли (σe). Фоновые сигналы в верхних измерениях, ZU, можно задать как eP, т.е. ZU=eP, где Р - это полиномиальная функция, показанная в уравнениях (5) или (6), и коэффициенты заданы путем среднеквадратического приближения, как описано на этапе 506. Фоновые сигналы как функцию электропроводности пласта или как функцию разностных измерений на двух высотах можно сохранять для дальнейшего использования, либо в виде поисковой таблицы, либо в виде графика, показанного на фиг.6, который будет описан ниже.
После того как корреляционная функция между разностными измерениями и верхними сигналами (или фоновыми сигналами в верхних сигналах) задана, ее можно использовать для определения истинной ошибки зонда в конкретном приборе. Во-первых, два измерения, по одному на первой и второй высоте, получают с использованием прибора в одном и том же приспособлении для коррекции (этап 501). Затем из двух измерений получают разностное измерение (этап 503). Затем это разностное измерение используют совместно с корреляционной функцией, полученной на этапе 506, или таблицей фонового сигнала или кривой, полученной на этапе 508, для обеспечения фонового сигнала в верхнем измерении (этап 505). Затем оцененный фоновый сигнал в верхнем измерении вычитают из верхнего измерения для обеспечения истинной ошибки зонда (ИОЗ) (этап 507).
Вышеизложенные процессы сопоставления разностных сигналов с верхними измерениями и подгонки полиномиальной функции можно лучше проиллюстрировать с помощью корреляционного графика. На фиг.6 показан график 60 зависимости сигнала земли (фона) от разности (δ) между измерениями zz на 4 футах и 12 футах с использованием 39-дюймового массива прибора на основе распространения электромагнитного сигнала. Прибор установлен, как показано на фиг.4, и сигналы R измеряются на частоте 26.8074 кГц при различных значениях электропроводности пласта в пределах от 1 мСм/м до 2000 мСм/м. На этом графике по оси х отложены разностные измерения (δ), которые являются функцией электропроводности земли (σe), и по оси y отложены вычисленные фоновые сигналы (Z12) в верхних измерениях. Кривая 60 базируется на коэффициентах, выведенных из полиномиального приближения разностных измерений к верхним измерениям.
С использованием этого графика и разности (δ) между измерениями zz на двух высотах можно определить сигнал, обеспечиваемый электропроводностью земли (Z12) в верхнем положении. Например, можно провести линию 61, соответствующую значению разности между измерениями на двух высотах. Линия 61 пересекает кривую графика 60 в точке 62. Затем из точки 62 проводят горизонтальную линию 63, чтобы получить значение фонового сигнала, обеспечиваемого электропроводностью земли. Затем фоновый сигнал можно вычесть из показания зонда в верхнем положении (12 футов), чтобы вывести истинную ошибку зонда.
Хотя в вышеприведенном описании используются верхние измерения для вывода корреляционной функции и для определения истинной ошибки зонда, для специалиста в данной области техники должно быть очевидно, что те же процедуры можно применять с использованием нижних измерений. Поэтому варианты осуществления изобретения не ограничиваются использованием верхних измерений. Процедуры калибровки можно использовать, когда прибор находится в вертикальном режиме или в горизонтальном режиме. Кроме того, варианты осуществления изобретения можно использовать для индукционного прибора или прибора на основе распространения.
Заметим, что истинная ошибка зонда и коэффициенты для вышеописанной корреляционной функции зависят от конфигураций массивов (например, промежутков между массивами и ориентаций катушек). Поэтому истинную ошибку зонда для каждой связи (xx, yy, zz, xz, zx и т.д.) следует вычислять по отдельности. На фиг.7-10 показаны графики для других связей, аналогичные графику, показанному на фиг.6. Кроме того, поскольку ошибка зонда зависит от рабочей частоты, эти вычисления следует осуществлять на каждой частоте, используемой в операции каротажа.
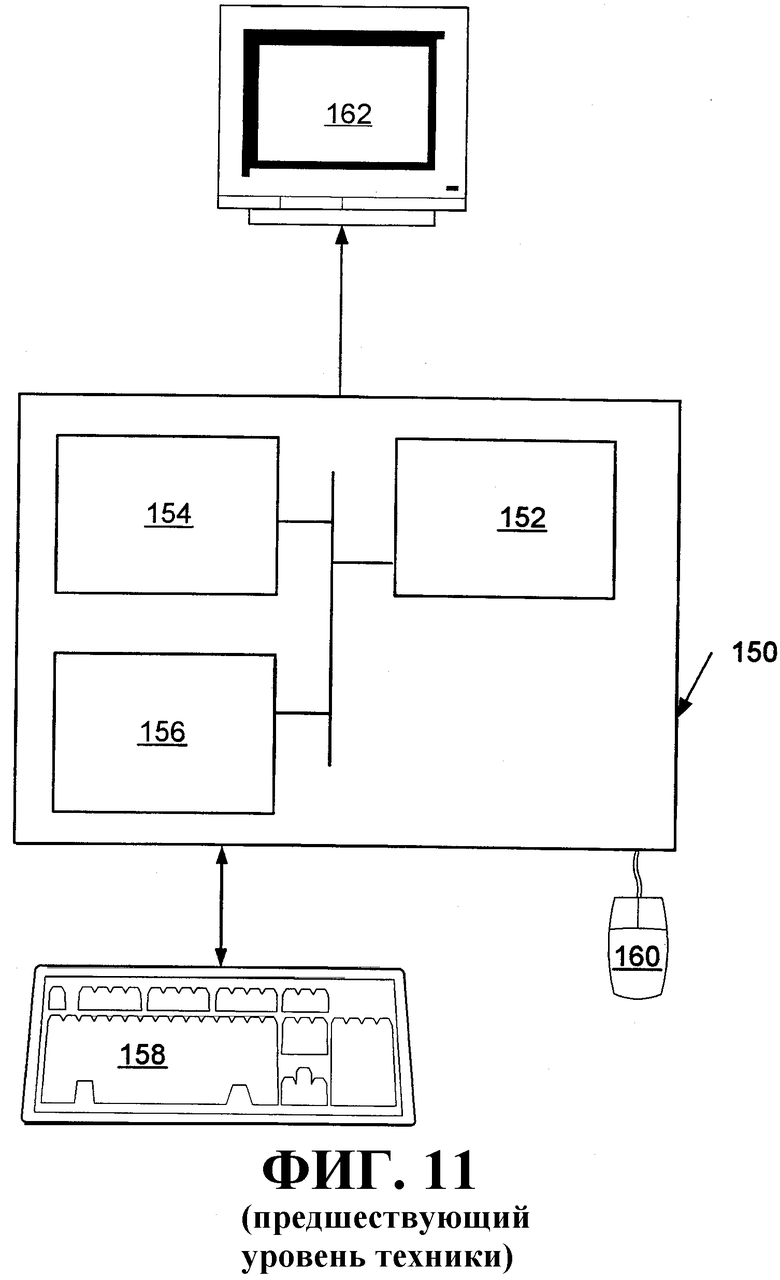
Некоторые варианты осуществления изобретения относятся к системам для осуществления вышеописанных способов. Система, отвечающая вариантам осуществления изобретения, может быть автономным устройством для осуществления способов, отвечающих изобретению, или может быть встроена в буровой инструмент (например, электронный картридж 24 или измерительный блок 42, показанный на фиг.1А). Система, отвечающая изобретению, обычно содержит процессор и память. В некоторых вариантах осуществления система может быть реализована на компьютере общего назначения, имеющем процессор, память и, в необязательном порядке, другое оборудование. Например, как показано на фиг.11, обычный компьютер (150) содержит процессор (152), оперативную память (154) и запоминающее устройство (например, постоянную память или жесткий диск) (156). Компьютер (150) может также включать в себя средства ввода, например клавиатуру (158) и мышь (160), и средства вывода, например монитор (162). Заметим, что компьютер общего назначения приведен только для иллюстрации, и варианты осуществления изобретения могут принимать другие формы (например, интегрированные в каротажный прибор).
В системе, отвечающей изобретению, в памяти хранится программа, считываемая процессором. Программа, например, может содержать команды для осуществления вышеописанных способов: получение измерений на двух высотах; вывод разностного измерения из измерений на двух высотах; вывод фонового сигнала из разностного измерения с использованием заранее заданной функции, которая сопоставляет фоновые сигналы в верхних измерениях со значениями электропроводности пласта (или разностными измерениями при совокупности значений электропроводности); вывод истинной ошибки зонда путем вычитания фонового сигнала из верхнего сигнала. Заранее заданную функцию (корреляционную функцию) выводят из прямого моделирования пласта и алгоритма подгонки верхних измерений к разностным измерениям, который описан выше.
Программирование можно осуществлять с использованием одного или нескольких устройств хранения программ, считываемых процессором компьютера, и путем кодирования одной или нескольких программ, состоящих из команд, считываемых компьютером, для осуществления описанных здесь операций. Устройство хранения программ может быть реализовано в виде, например, одного или нескольких дискет; компакт-диска (CD-ROM) или другого оптического диска; магнитной ленты; чипа постоянной памяти (ПЗУ); и другими средствами, общеизвестными в технике. Программа, состоящая из команд, может иметь вид “объектного кода”, т.е. двоичного кода, непосредственно исполняемого компьютером; “исходного кода”, для исполнения которого требуется компиляция или интерпретация; или некоторый промежуточный вид, например, частично компилированного кода. Конкретные формы устройства хранения программ и кодирования команд не имеет принципиального значения для настоящего изобретения.
Преимущества изобретения могут включать в себя следующее. Способы корректировки ошибки зонда, в целом, применимы к индукционному прибору или прибору на основе распространения. Кроме того, эти способы можно использовать применительно к однокатушечным массивам или полностью трехосным массивам. Эти способы также можно использовать, даже если массивы не являются ортогональными массивами, т.е. наклонными массивами. Варианты осуществления изобретения не требуют поворота прибора для коррекции катушек в других ориентациях, требуются только измерения на двух или более высотах. Поскольку поворот прибора не требуется, не вносится ошибка, обусловленная неточностью поворота. После того как произведена калибровка, ошибку зонда либо функцию и/или коэффициенты коррекции можно сохранять для дальнейшей коррекции ошибки зонда в каротажных измерениях.
Хотя изобретение описано в отношении ограниченного количества вариантов осуществления, специалисты в данной области, воспользовавшись этим раскрытием, могут предложить другие варианты осуществления, не выходящие за рамки раскрытого здесь объема изобретения. Соответственно объем изобретения должен быть ограничен только прилагаемой формулой изобретения.
Изобретение относится к области электрического каротажа. Сущность: измеряют первый действительный импеданс между заданной парой передатчик приемник, когда каротажный прибор находится на первой высоте над землей. Измеряют второй действительный импеданс между заданной парой передатчик приемник, когда каротажный прибор находится на второй высоте над землей. Вычисляют разность измерений. Вычисляют смоделированные импедансы для первой и второй высот с использованием прямой модели слоистых пластов для диапазона электропроводности пласта. Вычисляют разность смоделированных импедансов. Определяют корреляционную функцию между смоделированной разностью и одним из смоделированных импедансов. Определяют фоновый сигнал в действительном импедансе с использованием действительного разностного измерения и корреляционной функции. Определяют ошибку зонда путем вычитания фонового сигнала из действительного импеданса, соответствующего выбранному смоделированному импедансу. Технический результат: возможность применения для приборов как индукционного каротажа, так и приборов на основе распространения с разным количеством катушек и их различной ориентацией без необходимости поворота прибора. 2 н. и 10 з.п. ф-лы, 11 ил.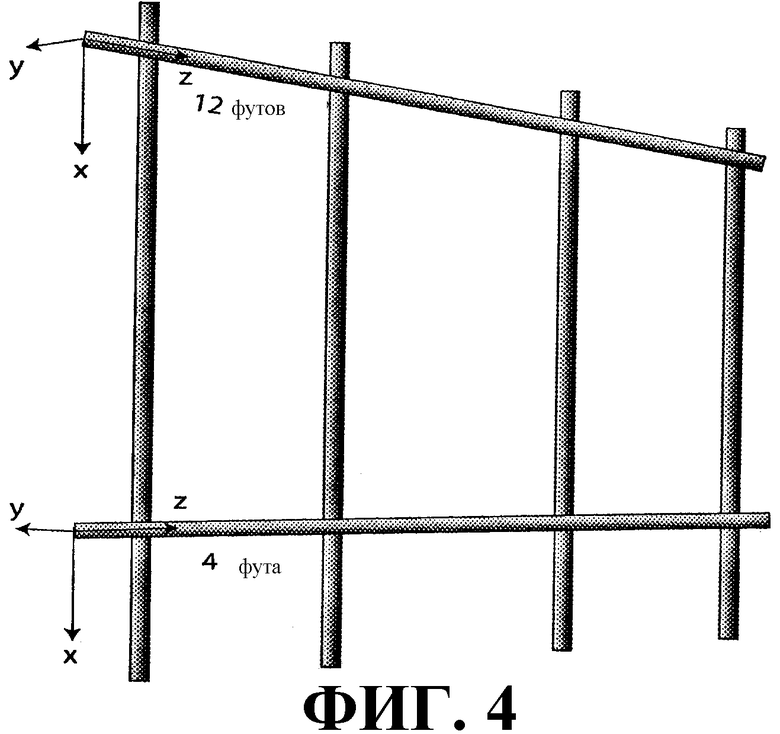
1. Способ определения ошибки зонда для любой заданной пары передатчик/приемник в каротажном приборе, содержащем по меньшей мере одну поперечную антенну, содержащий этапы, на которых
измеряют первый действительный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на первой высоте над землей в выбранной ориентации,
измеряют второй действительный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на второй высоте от поверхности земли в выбранной ориентации,
вычисляют действительное разностное измерение с использованием первого действительного импеданса и второго действительного импеданса,
вычисляют первый смоделированный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на первой высоте над землей в выбранной ориентации с использованием прямой модели слоистых пластов для диапазона значений электропроводности пласта,
вычисляют второй смоделированный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на второй высоте над землей в выбранной ориентации с использованием прямой модели слоистых пластов для диапазона значений электропроводности пласта,
вычисляют смоделированное разностное измерение из первого смоделированного импеданса и второго смоделированного импеданса для всех электропроводностей пласта,
определяют корреляционную функцию между смоделированным разностным измерением и одним выбранным из первого и второго смоделированных импедансов,
определяют фоновый сигнал в действительном импедансе, который соответствует выбранному смоделированному импедансу с использованием действительного разностного измерения и корреляционной функции, и
определяют ошибку зонда для заданной пары передатчик/приемник путем вычитания фонового сигнала из действительного импеданса, который соответствует выбранному смоделированному импедансу.
2. Способ по п.1, в котором первая высота меньше второй высоты.
3. Способ по п.1, в котором выбранный смоделированный импеданс является вторым смоделированным импедансом, и действительный импеданс, соответствующий выбранному смоделированному импедансу, является вторым действительным импедансом.
4. Способ по п.1, в котором каротажный прибор имеет по меньшей мере один набор взаимно ортогональных антенн передатчика и один набор взаимно ортогональных антенн приемника.
5. Способ по п.1, в котором корреляционную функцию получают путем подгонки функции одного из действительного и смоделированного разностных измерений к функции одного из действительного и смоделированного второго импеданса.
6. Способ по п.1, в котором каротажный прибор размещают горизонтально над землей.
7. Способ определения ошибки зонда для любой заданной пары передатчик/приемник в каротажном приборе, содержащем по меньшей мере одну поперечную антенну, содержащий этапы, на которых
измеряют первый действительный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на первой высоте в выбранной ориентации,
измеряют второй действительный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на второй высоте в выбранной ориентации,
вычисляют действительное разностное измерение с использованием первого действительного импеданса и второго действительного импеданса,
вычисляют первый смоделированный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на первой высоте над землей в выбранной ориентации с использованием прямой модели слоистых пластов для диапазона значений электропроводности пласта,
вычисляют второй смоделированный импеданс между заданной парой передатчик/приемник, когда каротажный прибор находится на второй высоте над землей в выбранной ориентации с использованием прямой модели слоистых пластов для диапазона значений электропроводности пласта,
вычисляют смоделированное разностное измерение из первого смоделированного импеданса и второго смоделированного импеданса для всех электропроводностей пласта,
определяют корреляционную функцию между смоделированным разностным измерением и одним выбранным из первого и второго смоделированных импедансов,
определяют смоделированный фоновый сигнал в выбранном смоделированном импедансе для всех электропроводностей пласта,
определяют фоновый сигнал с использованием в действительном импедансе, который соответствует выбранному смоделированному импедансу с использованием действительного разностного измерения и смоделированного фонового, и
определяют ошибку зонда для заданной пары передатчик/приемник путем вычитания фонового сигнала из действительного импеданса, который соответствует выбранному смоделированному импедансу.
8. Способ по п.7, в котором первая высота меньше второй высоты.
9. Способ по п.7, в котором выбранный смоделированный импеданс является вторым смоделированным импедансом, и действительный импеданс, соответствующий выбранному смоделированному импедансу, является вторым действительным импедансом.
10. Способ по п.7, в котором каротажный прибор имеет по меньшей мере один набор взаимно ортогональных антенн передатчика и один набор взаимно ортогональных антенн приемника.
11. Способ по п.7, в котором корреляционную функцию получают путем подгонки функции одного из действительного и смоделированного разностных измерений к функции одного из действительного и смоделированного второго импеданса.
12. Способ по п.7, в котором каротажный прибор размещают горизонтально над землей.
| US 4800496 A, 24.01.1989 | |||
| US 4513376 A, 23.04.1985 | |||
| АППАРАТУРА ДЛЯ ИНДУКЦИОННОГО КАРОТАЖА | 0 |
|
SU284194A1 |
| 0 |
|
SU264558A1 | |

