Изобретение относится к области обнаружения дефектов в подшипниках букс железнодорожных вагонов акустическим методом при движении поезда.
Известно устройство автоматического распознавания греющихся букс железнодорожного подвижного состава (а.с. №578212 с приоритетом от 04.06.73 г.), которое содержит размещенные на пути рельсовые датчики прохода колесных пар, приемник инфракрасного излучения, блоки формирования признаков распознавания, пороговые элементы и блок логической обработки. Если интенсивность нагрева буксы превышает определенный порог, то вырабатывается сигнал, показывающий, какая букса нагрета.
Недостатком этого устройства является то, что дефектная букса обнаруживается на стадии почти аварийного состояния.
Известно также устройство для контроля состояния букс пассажирских вагонов (пат. РФ №2093396 с приоритетом 14.04.95 г.). Устройство содержит две цепочки по четыре последовательно соединенных плавких датчика нагрева буксы, сигнальную систему, схему питания и схему включения и выключения. При нагреве каких-либо элементов буксы плавится один или несколько датчиков, при этом резко изменяется сопротивление цепочки с датчиками и срабатывает сигнальная система.
Это устройство обладает следующими недостатками.
Монтироваться оно должно на каждой буксе и определяет дефектную буксу, когда она уже в предаварийном или аварийном состоянии.
Известно также устройство для диагностики и мониторинга дефектов подшипников колесно-моторных блоков локомотива в движении (пат. РФ №62460 на полезную модель с приоритетом 28.11.2006 г.). Устройство содержит датчики виброускорений, установленные вблизи внешней обоймы подшипника, и датчики температуры, установленные не менее одного на каждом подшипнике колесно-моторных блоков, регистратор сигналов и бортовой компьютер.
По сравнению с вышеописанными аналогами это устройство обладает существенным преимуществом - постоянный контроль виброускорений и температур на подшипниках дает возможность обнаруживать дефекты на ранних стадиях их развития. Однако датчики вибраций и температур необходимо устанавливать на каждую буксу, что практически невозможно делать с товарными вагонами - сложно и нерентабельно. Желательно использовать бесконтактный метод измерений вибрационного состояния подшипников букс.
Одним из таких аналогов является "Акустический детектор дефектов подшипников" (патент Великобритании №2015412, опубликованный 27.02.1990 г.).
Указанное техническое решение как наиболее близкий аналог может быть принято в качестве прототипа.
В приведенном патенте предложенная акустическая система для обнаружения и идентификации дефектов подшипников движущихся по железной дороге колес осуществляет прием сигнала от подшипника только при прохождении колеса через определенную зону, когда подшипник находится напротив приемного окна сигналов.
Указанный прототип имеет следующие недостатки.
1. Применяемый рупор, с диаграммой направленности в горизонтальной плоскости 60°, собирает все же значительное количество помех из пространства, выходящего за пределы буксы.
2. Разрешающая способность спектрального анализа в 1/3 октавы значительно снижает чувствительность, следовательно, и надежность детектирования дефектов подшипника, особенно дефектов, проявляющихся в более высокочастотном диапазоне.
3. При диаграмме направленности рупора в 60° эффект Доплера оказывает влияние на частотный состав принимаемого сигнала, что ухудшает точность спектрального анализа.
4. Жесткое ограничение времени регистрации и анализа акустических шумов не позволяет вводить дополнительных алгоритмов обработки сигналов для улучшения качества анализа.
5. Для детектирования дефекта сепаратора недостаточно снимать акустическую информацию с буксы в течение одного оборота колеса. Один оборот сепаратор совершает за 2,5 оборота колеса. Следовательно, для съема полной информации о дефектах подшипника необходимо принимать информацию с буксы, на пути которой колесо совершает 2,5 оборота.
Сущность изобретения направлена на устранение перечисленных недостатков.
1. Для улучшения диаграммы направленности и уменьшения количества помех, поступающих в рупор из окружающего пространства, предлагается применить параболический рупор, а микрофон поместить в фокус этого рупора. Продолжение устья рупора предлагается выполнить в виде цилиндра с диаметром, равным диаметру устья рупора. Диаграмма направленности длинного параболического рупора дает право считать его выходное отверстие поршнем. Только такой тип рупора посылает и, соответственно, принимает параллельно направленный пучок звука. Такой рупор, направленный своей акустической осью на буксу, вдоль оси колесной пары, принимает акустическую информацию практически только с буксы.
2. Для увеличения разрешающей способности анализа должна быть увеличена длительность регистрируемого акустического сигнала. Учитывая то, что прием акустического сигнала с буксы, при движении колеса по рельсу, осуществляется до тех пор, пока устье рупора перекрывается диаметром буксы, необходимо вдоль рельса расположить несколько рупоров с промежутками между ними не более одного диаметра буксы. Таким образом, при последовательном движении колеса мимо первого рупора происходит съем начала сигнала с буксы, а при прохождении мимо последующих рупоров снимается продолжение этого сигнала. Общая длительность сигнала будет зависеть от количества установленных рупоров.
3. Так как съем акустического сигнала с буксы происходит постоянно, при неизменном расстоянии между буксой и микрофоном в рупоре, эффект Доплера отсутствует.
4. Акустический сигнал, принимаемый с буксы микрофоном с рупором, после усиления поступает через аналого-цифровой преобразователь (АЦП) на вход компьютера. Во время движения поезда происходит только регистрация, а обработка и анализ происходят в компьютере после прохода поезда. Это позволяет не накладывать очень жесткие ограничения на длительность регистрации сигналов и на время и алгоритмы обработки и анализа.
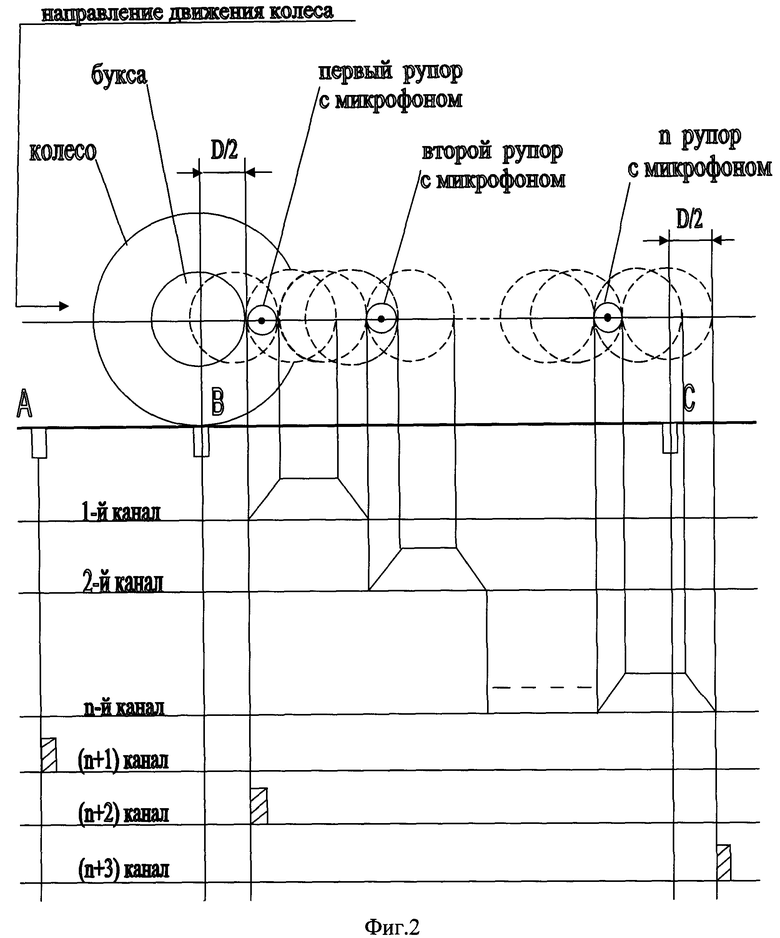
5. В связи с тем что регистрация и обработка с анализом сигналов разделены во времени, появляется возможность регистрировать сигнал для обработки любой длительности. Технических ограничений практически нет, есть только ограничение по стоимости - во сколько раз необходимо увеличить длительность сигнала, во столько раз необходимо увеличить количество рупоров с микрофонами. Сущность изобретения поясняется чертежами, где на фиг.1 приведена схема акустического детектора дефектов подшипников железнодорожных вагонов. Поз. 1 обозначены рельсы железнодорожного полотна, 2 - рупоры, 3 - микрофоны с предусилителями, установленные в рупоры, 4 - усилители электрического сигнала с микрофонов, 5 - аналого-цифровой преобразователь, 6 - компьютер, 7 - датчики прохода колесных пар. На фиг.1 приведена схема системы детектирования только по одну сторону железнодорожного полотна, так как по вторую сторону все симметрично и в том же составе. Изображены только рупоры. Компьютер и АЦП могут быть использованы как отдельные на каждую сторону, так и один комплект на обе стороны, только АЦП с большим количеством каналов. Датчики А, В, С используются одни и те же на обе стороны.
На фиг.2 приведена схема перемещения буксы с колесом относительно рупоров с микрофонами и циклограмма записей сигналов по каналам. В верхней части чертежа условно изображены рупоры с микрофонами и перемещающееся по рельсу колесо с буксой, а вдоль рельса - датчики А, В, С. Ниже рельса условно изображена циклограмма последовательности записей сигналов по всем измерительным каналам при движении одного колеса.
По обе стороны железнодорожного полотна перпендикулярно акустической осью к рельсам расположены рупоры 2 с микрофонами 3. С каждой стороны (т.е. против каждого рельса) установлено n=L/(D+d) рупоров с микрофонами, где D - диаметр буксы, d - диаметр рупора, L - путь прохождения колеса вагона за 2,5 оборота колеса. Микрофоны 3 соединены с усилителями 4 кабелями, выходы усилителей 4 со входами АЦП 5, выход АЦП 5 подключен к входу компьютера 6. Датчики 7 установлены у одного из рельсов. Для защиты микрофонов от вредных воздействий окружающей среды имеются системы термостатирования, открытия заслонок в отверстиях рупоров на момент прохождения поезда и закрытия их после ухода поезда. Датчик А установлен у рельса на таком расстоянии от места установки рупоров с микрофонами, чтобы после проезда первого колеса через этот датчик до подхода его к микрофонам хватило времени для открытия заслонок и выключения системы термостатирования. Датчики В и С являются датчиками присутствия колеса. Датчик В устанавливается на расстоянии D/2 до места соприкосновения окружностей проекций буксы и первого рупора на плоскость, проходящую через вертикаль и вдоль рельса. Датчик С устанавливается на таком же расстоянии, но после места соприкосновения окружностей проекций буксы и последнего рупора. Выходы всех трех датчиков (А, В, С) подключены как измерительные каналы через АЦП к компьютеру.
Работает акустический детектор дефектов подшипников железнодорожных вагонов следующим образом. Детектор включен и находится в ждущем режиме. Приближающийся поезд колесом пересекает датчик А. Датчик срабатывает и выдает сигнал, который по (n+1) измерительному каналу поступает через АЦП 5 в компьютер 6. В компьютере запускается программа подготовки системы к работе (по команде с компьютера открываются заслонки рупоров, отключаются приборы, могущие создать помехи для микрофонов и подготавливается к работе программа считывания информации с микрофонов). При подъезде поезда к первому рупору в момент пересечения первым колесом датчика В сигнал с датчика поступает в компьютер 6 через АЦП 5 по измерительному каналу (n+2). Этим сигналом запускается программа считывания информации с микрофонов.
С микрофонов аналоговые сигналы поступают на входы АЦП, а потом в цифровом виде с определенным шагом дискретизации эти сигналы поступают в компьютер. По мере перемещения колеса по рельсу, как изображено на фиг.2, если спроецировать сечение буксы и сечение рупора на плоскость, лежащую вдоль рельса и перпендикулярную осям буксы и рупора, проекция буксы сначала касается проекции рупора, затем она перекрывает ее сначала частично, а потом полностью. При дальнейшем перемещении колеса проекция рупора выходит из проекции буксы, и, когда выйдет полностью, т.е. проекция первого рупора коснется проекции буксы с противоположной стороны диаметра, в этот же момент времени проекция второго рупора будет касаться с другой стороны проекции буксы и т.д., процесс будет повторяться со вторым, третьим и следующими рупорами. После выхода последнего рупора из проекции этой же буксы в момент соприкосновения срабатывает датчик С. В компьютер поступает сигнал об окончании регистрации акустического сигнала с первой буксы. Циклограммой на фиг.2 условно показано, как изменяется акустический сигнал по мере перемещения колеса. При движении буксы мимо рупора интенсивность полезного сигнала в микрофоне сначала растет, когда увеличивается площадь перекрытия проекций рупора и буксы, затем она некоторое время постоянна, а потом убывает с уменьшением площади перекрытия. При этом частотно-фазовый состав полезного сигнала в каналах практически не меняется, что позволяет в обработку брать длительность сигнала, увеличенную в "n" раз, т.е. соединив начало сигнала, полученного из каждого последующего рупора, с концом сигнала каждого предыдущего рупора одной и той же буксы. Каждое следующее колесо и, соответственно, букса проходят весь этот цикл, и информация с микрофонов и датчиков В и С регистрируется в памяти компьютера. Информация с датчика С в каждом цикле анализируется. Если в течение нескольких секунд датчик С не дает сигналов или после срабатывания датчика С резко снизилась амплитуда сигналов по "n" каналам, то компьютер выдает сигнал на завершение регистрации, закрытие заслонок рупоров и включение системы термостатирования, а после этого компьютер включает программу предварительной обработки. Предварительная обработка включает в себя распаковку и сохранение данных, полученных с микрофонов, расчет скорости движения состава по импульсам с датчиков В и С, сортировку данных для формирования непрерывных массивов по каждому буксовому узлу. После этого включается программа обнаружения дефектных букс.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСТ КОМПЛЕКСНОГО КОНТРОЛЯ ДЕФЕКТОВ БУКСОВЫХ УЗЛОВ И КОЛЕС ДВИЖУЩИХСЯ ВАГОНОВ | 2014 |
|
RU2578005C1 |
| Способ акустического контроля состояния буксовых узлов движущегося поезда | 2022 |
|
RU2781416C1 |
| Система контроля дефектов колёсных пар подвижного железнодорожного состава | 2023 |
|
RU2818020C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТНЫХ БУКС ВАГОНОВ | 2015 |
|
RU2641536C2 |
| АВТОМАТИЗИРОВАННАЯ ДИАГНОСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕМЕНТОВ ПОДВЕСКИ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2578620C1 |
| СПОСОБ ОЦЕНКИ СТЕПЕНИ ИЗНОСА ТЕЛЕЖКИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2010 |
|
RU2437091C1 |
| СПОСОБ ДИАГНОСТИКИ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И МЕТРОПОЛИТЕНА | 2010 |
|
RU2466047C2 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2437090C1 |
| СПОСОБ ДИАГНОСТИКИ НАЛИЧИЯ ТРЕЩИН В ХОДОВЫХ ЧАСТЯХ ТЕЛЕЖКИ ПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2535246C1 |
| Способ акустико-эмиссионной диагностики ответственных деталей тележек грузовых вагонов при эксплуатации | 2017 |
|
RU2667808C1 |
Изобретение относится к области обнаружения дефектов в подшипниках букс железнодорожных вагонов акустическим методом при движении поезда. Акустический детектор дефектов подшипников содержит рупоры с микрофонами, датчики присутствия колеса и процессор акустического сигнала. Рупоры выполнены параболической формы. Устье каждого рупора переходит в цилиндр, диаметр которого равен диаметру устья. Микрофон помещен в фокус параболической части рупора. Процессор акустического сигнала содержит преобразователь аналог-код и компьютер. Количество рупоров с микрофонами, устанавливаемых против каждого рельса, выбирают не менее чем путь перемещения буксы за один оборот колеса, поделенный на сумму диаметров буксы и устья рупора. Технический результат заключается в увеличении помехозащищенности, увеличении разрешающей способности анализа акустического сигнала. 3 з.п. ф-лы, 2 ил.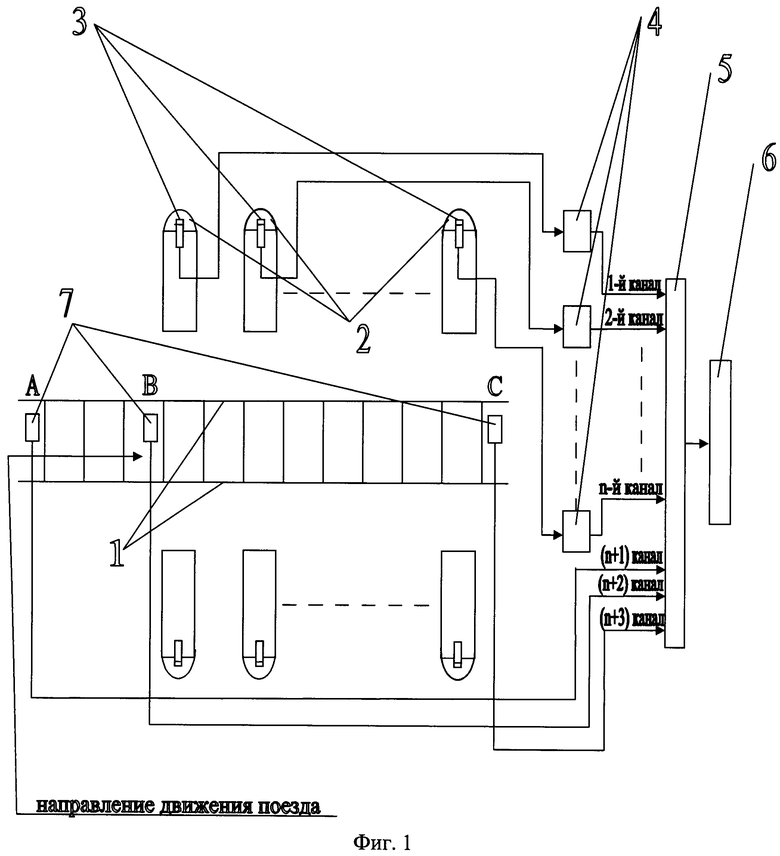
1. Акустический детектор дефектов подшипников в буксах движущихся железнодорожных вагонов, содержащий рупоры с микрофонами, датчики присутствия колеса, процессор акустического сигнала, отличающийся тем, что рупоры выполнены параболической формы, а микрофоны помещены в фокусы параболической части рупоров.
2. Акустический детектор по п.1, отличающийся тем, что количество рупоров с микрофонами, устанавливаемых против каждого рельса, выбрано числом не менее чем путь перемещения буксы за один оборот колеса, поделенный на сумму диаметров буксы и устья рупора.
3. Акустический детектор по п.2, отличающийся тем, что устье каждого рупора переходит в цилиндр, диаметр которого равен диаметру устья.
4. Акустический детектор по п.3, отличающийся тем, что процессор акустического сигнала содержит преобразователь, аналог-код и компьютер.
| JP 2003090336 А, 28.03.2003 | |||
| Приспособление для отыскания невидимых невооруженным глазом летательных аппаратов | 1925 |
|
SU9343A1 |
| RU 2006129174 A, 27.02.2008. | |||

