Изобретение относится к области измерительной техники и предназначено для определения скоростей движения транспортных средств с одновременной их идентификацией, осуществляемой с использованием радиоволн, например, при проведении испытаний или спортивных соревнований.
Известен акустический способ определения скорости движения автомобиля в условиях плохой видимости, заключающийся в приеме электроакустическим преобразователем тональной составляющей звука, производимой автомобилем, по частоте которой определяют скорость движения автомобиля, при этом тональную составляющую звука f0, Гц, выделяют из спектра шумоизлучения автомобиля, для чего непрерывно измеряют изменения доплеровской частоты f(t), Гц, во времени t с данной тональной составляющей f0 и на временах, на которых наблюдается постоянство доплеровской частоты f(t) во времени t, определяют значение скорости V (м/с) движения автомобиля по математической зависимости
где C, м/с, - известная скорость звука или скорость звука, определенная экспериментально, непосредственно в период определения скорости автомобиля, причем в момент времени t0, когда f(t)=f0, определяют траверзное расстояние d0 между автомобилем и электроакустическим преобразователем исходя из математической зависимости (см. описание к патенту РФ №2290660, МПК G01S 11/14, опубл. 10.08.2006 г.).
Известный способ может применяться в условиях плохой видимости, но не является в достаточной степени надежным и не позволяет произвести идентификацию транспортного средства, вследствие чего не получил распространения.
Известен способ, реализованный в устройстве определения скорости автомобиля, включающий установку пар чувствительных к давлению детекторных кабелей, положенных в дорожном полотне поперек направления движения автомобиля и передающих сигналы на регистрирующие приборы, после обработки сигналов которыми производят вычисление скорости известными методами.
На регистрирующих приборах формируются индивидуальные сигналы переезда от каждого колеса автомобиля, позволяющие определить время его движения по отрезку пути L между отрезками кабелей, также время проезда отрезков кабелей колесами одной оси, появляющуюся при отклонении направления движения автомобиля от параллельного оси дороги.
Обрабатывающая данные сигналы аппаратура реализовывает формулу вычисления скорости с учетом величины колеи транспортного средства (см. описание изобретения к патенту РФ №2025735, МПК G01P 3/66, опубл. 30.12.1994 г.).
Известный способ достаточно прост в производстве и пригоден для измерения скорости автомобиля в широком диапазоне погодных условий. Недостатками известного способа являются низкая надежность реализующих его устройств из-за необходимости механического взаимодействия колес транспортного средства с детекторными кабелями, а также невозможность идентификации конкретного транспортного средства. Кроме того, существенная разность масс различных транспортных средств требует широкого динамического диапазона датчиков давления, что усложняет реализацию известного способа, а наличие наледи или снежного покрова на дороге снижает надежность самого измерения скорости, так как уменьшает силу механического воздействия колес на датчики давления.
Наиболее близким по технической сущности - прототипом является способ, реализованный в системе контроля движения транспортных средств, заключающийся в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках дороги с помощью двух или более датчиков, чувствительных к изменению давления, установленных в этих точках дороги, измерении времени перемещения транспортного средства между этими точками траектории транспортного средства и последующем вычислении скорости движения транспортного средства, а также идентификации транспортного средства с помощью датчика идентификации, установленного на автомобиле, и приемопередатчика, установленного в непосредственной близости от дороги, который начинает и прекращает работать при пересечении автомобилем первого по ходу его движения и второго датчиков давления соответственно (см. описание к RU 75768 U1, кл. G08G 1/00).
Недостатки известного способа обусловлены инерционностью датчиков давления, что требует разнесения мест установки датчиков на расстояние более чем 100 метров при высоких скоростях движения транспортных средств. Последнее снижает надежность идентификации, так как на таком значительном интервале дороги, в том числе скоростной трассы, вполне могут оказаться несколько автомобилей. Более того, увеличение интервала установки датчиков давления снижает надежность и точность измерения скорости, так как, попав в зону измерения и идентификации, водитель транспортного средства может снизить скорость, что на интервале 100 м вполне возможно, и результирующая скорость измерения окажется неверной.
Использование в известном решении датчиков давления характеризуется также невозможностью локализации транспортного средства размерами одной полосы движения, так как асфальтовое или бетонное покрытие хорошо передает акустические колебания на сравнительно большие расстояния. Если при этом используются датчики с большим динамическим диапазоном (высокой чувствительностью), что требуется из-за значительного разнообразия масс транспортных средств, то результатом является большое количество ложных срабатываний от движения транспортных средств по другим полосам проезжей части, в том числе и встречным. Использование грубых датчиков давления с низким динамическим диапазоном влечет снижение вероятности обнаружения транспортных средств, также снижая надежность измерения.
Дифференциальное включение датчиков давления, повышающее их чувствительность, характеризуется периодической формой сигнала реакции на возмущающее воздействие, что также усложняет процесс измерения скорости быстро движущегося автомобиля, когда воздействие кратковременное, а выходной сигнал имеет форму последовательности затухающих импульсов.
Указанные недостатки исключают возможность использования известного способа в условиях скоростного движения транспортных средств, например на трассе, что снижает область его применения.
Задачей и обусловленным ею техническим результатом является расширение области применения за счет обеспечения возможности измерения скорости транспортных средств при высокой скорости их движения, в том числе на трассе, повышения надежности работы устройств, реализующих заявленный способ, благодаря использованию бесконтактного (дистанционного) метода обнаружения транспортных средств одновременно с их идентификацией, повышения надежности измерения скорости транспортного средства и его идентификации благодаря возможности уменьшения интервала измерения, а также за счет исключения ложных срабатываний от транспортных средств, движущихся по другим полосам дороги.
Указанный технический результат достигается тем, что в способе определения скорости движения транспортного средства, заключающемся в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках предполагаемой траектории его движения, с помощью двух или более датчиков обнаружения, установленных в этих точках обнаружения, измерении времени перемещения транспортного средства между этими точками обнаружения, последующем вычислении скорости движения транспортного средства и его идентификации с помощью, по меньшей мере, одного узла идентификации установленного на автомобиле, обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют дистанционно по наличию ответных радиосигналов от каждого из узлов идентификации, а в процессе обнаружения идентифицируют пары ответных радиосигналов от каждого из узлов идентификации, формируют радиосигналы опроса узлов идентификации по заранее определенному графику независимо от наличия транспортного средства между точками обнаружения,
Кроме того:
- ответный радиосигнал формируют с помощью узла идентификации так, чтобы, по меньшей мере, один из параметров ответного радиосигнала был связан с идентифицируемым транспортным средством;
- определение скорости транспортных средств осуществляют в нескольких местах определенной заранее территории;
- осуществляют сравнение данных об идентифицируемом транспортном средстве с данными зарегистрированных транспортных средств;
- в качестве узлов идентификации используют пассивные или активные радиометки RFID;
- обнаружение и идентификацию транспортного средства осуществляют одновременно с помощью одних и тех же средств, взаимодействующих друг с другом, -датчиков обнаружения и узлов идентификации.
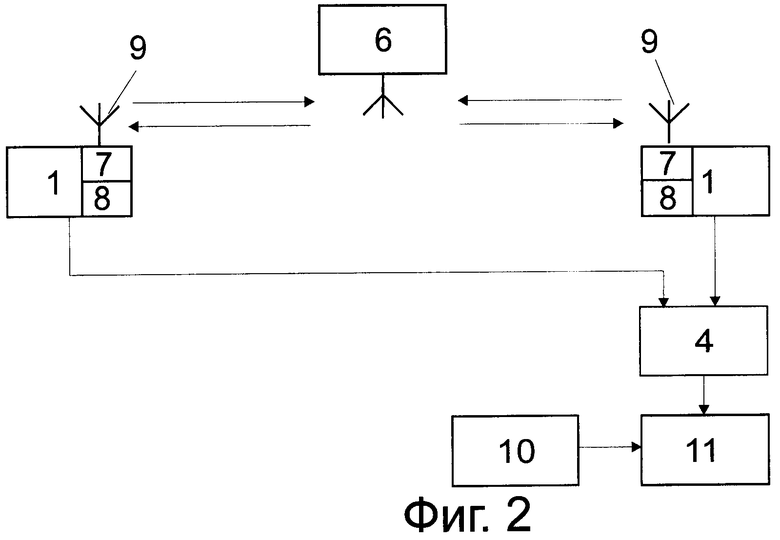
Способ измерения скорости движения транспортного средства поясняется с помощью чертежей, где на Фиг.1 показан пример расположения датчиков обнаружений на проезжей части дороги, на Фиг.2 - пример структурной схемы устройства, реализующего заявленный способ.
На чертежах сделаны следующие обозначения: 1 - датчики обнаружения; 2 - полоса проезжей части дороги; 3 - расстояние между датчиками обнаружения (точками обнаружения); 4 - узел обработки; 5 - транспортные средства; 6 - узел идентификации; 7 и 8 - передатчик и приемник узла обнаружения соответственно; 9 - антенны датчиков обнаружения; 10 - база зарегистрированных транспортных средств; 11 - узел сравнения данных.
Способ определения скорости движения транспортного средства заключается в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках предполагаемой траектории его движения с помощью двух или более датчиков обнаружения, установленных в этих точках обнаружения, измерении времени перемещения транспортного средства между этими точками обнаружения, последующем вычислении скорости движения транспортного средства и его идентификации с помощью, по меньшей мере, одного узла идентификации, установленного на автомобиле, при этом обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют дистанционно по наличию ответных радиосигналов узлов идентификации, а в процессе обнаружения идентифицируют пары ответных радиосигналов от каждого из узлов идентификации, при этом так, что обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют одновременно с его идентификацией по ответным радиосигналам узла идентификации, для чего формируют радиосигналы опроса узлов идентификации по заранее определенному графику независимо от наличия транспортного средства между точками обнаружения,
Обнаружение и идентификацию транспортного средства осуществляют одновременно с помощью одних и тех же средств, взаимодействующих друг с другом, - датчиков обнаружения и узлов идентификации.
Ответный радиосигнал формируют с помощью узла идентификации так, чтобы, по меньшей мере, один из параметров ответного радиосигнала был связан с идентифицируемым транспортным средством.
Определение скорости транспортных средств осуществляют в нескольких местах определенной заранее территории.
Осуществляют сравнение данных об идентифицируемом транспортном средстве с данными зарегистрированных транспортных средств.
В качестве узлов идентификации используют пассивные или активные радиометки RFID.
Заявленный способ реализуется следующим образом.
Для реализации заявленного способа формируют базу идентификационных данных некоторой «совокупности транспортных средств - зарегистрированных транспортных средств, а идентификационные данные каждого конкретного транспортного средства из этой совокупности сопоставляют с определенным сигналом (цифровым кодом), параметры которого заносятся в энергонезависимую память узла идентификации транспортного средства в целях формирования ответного (отраженного) сигнала, однозначно связанного с идентификационными данными конкретного транспортного средства.
В заранее определенных местах дороги (в точках предполагаемой траектории транспортных средств), где осуществляется движение транспортных средств 5, снабжаемых установленным на них, по меньшей мере, одним узлом 6 идентификации, устанавливают пары датчиков 1 обнаружения, при этом расстояние 3 между датчиками каждой пары известно или определено заранее. Датчики обнаружения функционируют бесконтактно с транспортным средством и поэтому могут быть размещены сбоку или сверху проезжей части дороги на специальных столбах или платформах либо могут быть размещены внутри дорожного покрытия непосредственно на проезжей части дороги.
На транспортном средстве размещен, по меньшей мере, один узел идентификации, который может быть выполнен встроенным в конструкцию номерного знака. Узлы идентификации, так же как и номерные знаки, индивидуальны для конкретного транспортного средства, так как обеспечивают модуляцию ответного или отраженного радиосигнала, позволяющую идентифицировать транспортное средство. Такая индивидуальность узлов идентификации может быть обеспечена, например, средствами цифрового кодирования ответного сигнала с применением амплитудной или фазовой манипуляции. Узел идентификации может быть выполнен как активным, так и пассивным.
Диаграммы направленности излучения датчиков обнаружения формируют так, чтобы главный лепесток диаграммы направленности был ориентирован на соответствующую полосу 2 проезжей части дороги, при этом на других полосах проезжей части дороги установлены свои пары датчиков обнаружения. Диаграммы направленности антенн узлов идентификации выполнены равномерными.
Диаграммы направленности антенн датчиков обнаружения могут также быть выполнены широкоугольными и охватывать несколько полос движения, при этом в отличие от известного решения возможно одновременное измерение скорости и идентификация нескольких автомобилей, движущихся по разным полосам.
Транспортное средство, двигаясь по дороге, попадает в поле зрения сначала одного датчика обнаружения, потом другого, которые обеспечивают его обнаружение. Время обнаружения каждым датчиком пары фиксируют и затем определяют скорость как отношение расстояния между датчиками обнаружения к времени, затраченному транспортным средством на перемещение между ними. Так как модуляция ответного сигнала узлов идентификации несет информацию о самом транспортном средстве, то помимо измерения скорости демодуляция ответного сигнала и в необходимых случаях его декодирование обеспечивает идентификацию самого транспортного средства.
Высокая скорость распространения электромагнитных колебаний обеспечивает практически безинерционность операции опроса узла идентификации, а возможность формирования достаточно коротких импульсных сигналов вплоть до наносекундной длительности снимает проблему точности измерения скорости и объема информации о транспортном средстве, передаваемой с помощью узла идентификации даже при небольшом в единицы метров разнесении датчиков обнаружения.
Благодаря тому, что измерение временного интервала для вычисления скорости осуществляется между парой «окрашенных» ответных импульсов присущим лишь данному транспортному средству индивидуальных данных, то в принципе исключается возможность влияния на точность измерения скорости сигналов от транспортных средств, движущихся по соседним полосам движения, а также спереди и сзади. Это обстоятельство, в частности, позволяет не предъявлять жестких требований к ширине главного лепестка диаграммы направленности антенн датчиков обнаружения, а использовать широкоугольные антенны.
Данные об идентифицированном транспортном средстве впоследствии могут выборочно сравниваться посредством узла сравнения 11 с данными зарегистрированных и хранящихся в базе данных 10 транспортных средств в целях локализации конкретного транспортного средства в пределах территории, на которой дороги оборудованы датчиками обнаружения, например при проведении испытаний или спортивных соревнований.
Пример
Каждому транспортному средству из некоторого множества, например, участвующих в испытаниях транспортных средств, присваивается определенный параметр сигнала, формируемого конкретным узлом идентификации в ответ на сигнал опроса датчиков обнаружения. Созданные однозначные соотношения между конкретным транспортным средством и параметрами ответного сигнала заносятся в электронную базу 10 данных (базу идентификационных данных зарегистрированных транспортных средств).
На проезжей части дороги непосредственно в полотно дороги вмонтированы датчики 1 обнаружения, расположенные парой вдоль дороги на расстоянии 10 метров. Диаграммы направленности антенн датчиков обнаружения имеют ширину главного лепестка 90° и ориентированы вертикально вверх. Датчики обнаружения представляют собой приемо-передающие устройства, работающие в радиодиапазоне и соединенные с узлом 4 обработки, который обеспечивает вычисление скорости и формирование результатов идентификации транспортного средства. При этом приемники датчиков обнаружения снабжены демодулятором (декодирующим узлом), обеспечивающим демодуляцию (декодирование) ответного сигнала узла идентификации.
Узлы 6 идентификации закреплены на номерном знаке автомобиля и представляют собой RFED метки, обеспечивающие формирование ответного сигнала, несущего уникальную информацию о самом транспортном средстве, благодаря модуляции (кодированию) ответного сигнала.
При движении автомобиля по дороге он попадает в поле зрения датчиков обнаружения, которые постоянно излучают радиосигнал опроса и ожидают ответного сигнала узлов идентификации. Таким образом, при наличии в зоне обнаружения датчиков движущегося автомобиля на входе приемника датчиков обнаружения формируется два импульсных сигнала от каждого узла идентификации, временная задержка между которыми определяется временем движения автомобиля между точками установки датчиков обнаружения, причем демодуляция (декодирование) сигналов позволяет выбрать из разнообразия входных сигналов пару однозначно соответствующих данному транспортному средству. Если скорость движения автомобиля составляет 120 км/ч, то задержка между ответными сигналами составит 0,3 сек. Сформированные выходные сигналы датчиков обработки подаются на вход узла обработки, где осуществляется идентификация транспортного средства путем демодуляции ответных сигналов и определение скорости его движения путем вычисления отношения величин расстояния между датчиками (10 м) к временной задержке между парой ответных импульсных сигналов
Данные о скорости транспортного средства и об обнаружении самого транспортного средства в конкретном месте дороги могут впоследствии сравниваться посредством узла 11 сравнения с данными базы 10 зарегистрированных транспортных средств и использоваться для целей локализации транспортного средства в пределах заданной территории.
Таким образом, заявленный способ имеет более широкую область применения за счет обеспечения возможности измерения скорости транспортных средств одновременно с их идентификацией при высокой скорости движения множества транспортных средств, в том числе на трассе. Заявленный способ обеспечивает более высокую надежность работы устройств, реализующих заявленный способ за счет обеспечения бесконтактного (дистанционного) измерения скорости, а также более высокую надежность измерения скорости и идентификации за счет уменьшения требуемого интервала измерения и исключения ложных срабатываний от транспортных средств, движущихся по другим полосам дороги.
Кроме того, заявленный способ обеспечивает упрощение реализации измерения скорости транспортных средств с одновременной их идентификацией за счет обеспечения возможности сократить количество датчиков обнаружения до двух, охватывающих все полосы движения дороги, независимо от количества транспортных средств.
При использовании заявленного способа обеспечивается также возможность локализации транспортного средства на определенной заранее территории на дороге, которая оборудована датчиками обнаружения.
Изобретение относится к области измерительной техники и предназначено для определения скоростей движения транспортных средств с одновременной их идентификацией, осуществляемой с использованием радиоволн, например, при проведении испытаний или спортивных соревнований. Способ определения скорости движения транспортного средства заключается в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках предполагаемой траектории его движения с помощью двух или более датчиков обнаружения, установленных в этих точках обнаружения, измерении времени перемещения транспортного средства между этими точками обнаружения, последующем вычислении скорости движения транспортного средства и его идентификации с помощью, по меньшей мере, одного узла идентификации, установленного на автомобиле, при этом обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют дистанционно по наличию ответных радиосигналов узлов идентификации, а в процессе обнаружения идентифицируют пары ответных радиосигналов от каждого из узлов идентификации, при этом так, что обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют одновременно с его идентификацией по ответным радиосигналам узла идентификации, для чего формируют радиосигналы опроса узлов идентификации по заранее определенному графику независимо от наличия транспортного средства между точками обнаружения. Технический результат - повышение надежности измерения скорости транспортного средства и его идентификации. 5 з.п. ф-лы, 2 ил.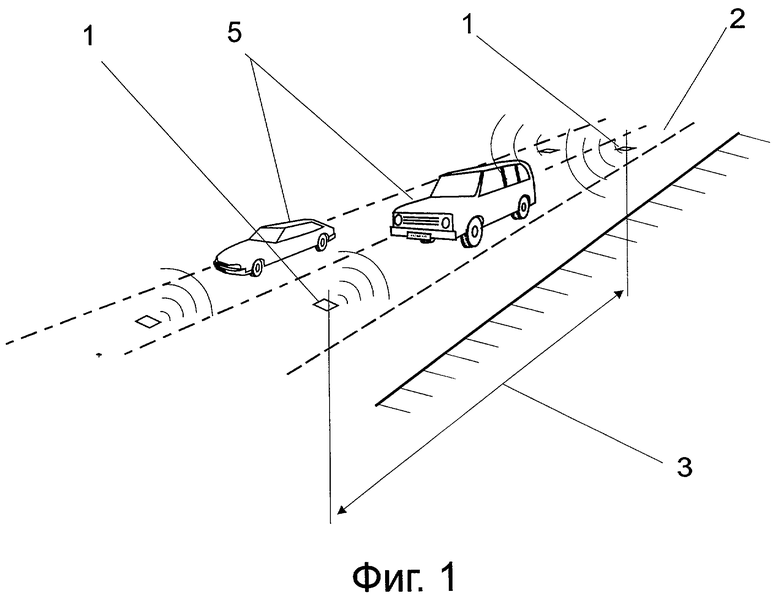
1. Способ определения скорости движения транспортного средства, заключающийся в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках предполагаемой траектории его движения с помощью двух или более датчиков обнаружения, установленных в этих точках обнаружения, измерении времени перемещения транспортного средства между этими точками обнаружения, последующем вычислении скорости движения транспортного средства и его идентификации с помощью, по меньшей мере, одного узла идентификации, установленного на автомобиле, отличающийся тем, что обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют дистанционно по наличию ответных радиосигналов узлов идентификации, а в процессе обнаружения идентифицируют пары ответных радиосигналов от каждого из узлов идентификации, при этом формируют радиосигналы опроса узлов идентификации по заранее определенному графику независимо от наличия транспортного средства между точками обнаружения.
2. Способ определения скорости движения транспортного средства по п.1, отличающийся тем, что ответный радиосигнал формируют с помощью узла идентификации так, чтобы, по меньшей мере, один из параметров ответного радиосигнала был связан с идентифицируемым транспортным средством.
3. Способ определения скорости движения транспортного средства по п.1, отличающийся тем, что определение скорости транспортных средств осуществляют в нескольких местах определенной заранее территории.
4. Способ определения скорости движения транспортного средства по п.1, отличающийся тем, что осуществляют сравнение данных об идентифицируемом транспортном средстве с данными зарегистрированных транспортных средств.
5. Способ определения скорости движения транспортного средства по п.1, отличающийся тем, что в качестве узлов идентификации используют пассивные или активные радиометки RFED.
6. Способ определения скорости движения транспортного средства по п.1, отличающийся тем, что обнаружение и идентификацию транспортного средства осуществляют одновременно с помощью одних и тех же средств, взаимодействующих друг с другом, - датчиков обнаружения и узлов идентификации.
| Устройство для отбора и перевалки смеси шерсти из постели | 1948 |
|
SU75768A1 |
| Устройство для измерения скорости транспортного средства | 1983 |
|
SU1137392A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ АВТОМОБИЛЯ | 1991 |
|
RU2025735C1 |
| JP 56157860 А, 05.12.1981. | |||

