ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область изобретения
Вариант настоящего изобретения относится к способу и системе для идентификации движущихся объектов и, в частности, к способу и системе для проверки движущихся объектов путем радиационного формирования изображения так, чтобы разные движущиеся объекты проверялись разными радиационными лучами.
Предшествующий уровень техники
В устройстве для быстрой проверки транспортного средства путем радиационного формирования изображения лучами высокой энергии для автоматического недопущения облучения кабины транспортного средства система осуществляет сканирование для проверки транспортного средства, по существу, после того, как передний конец транспортного средства подойдет в заранее заданное положение в направлении выхода из прохода. Однако, поскольку внешние профили разных транспортных средств сильно отличаются друг от друга, при таком способе необходимо надежно предотвратить облучение кабины транспортного средства, имеющего наибольшую кабину. В этом случае при проверке набольших транспортных средств информация, содержащаяся в изображении небольшого транспортного средства, будет неполной и некоторые небольшие транспортные средства даже нельзя проверять. При проверке контейнеровоза в изображении присутствует лишняя информация, не являющаяся необходимой. При таком способе проверки ограничивается энергия и доза излучения и в результате некоторые транспортные средства невозможно проверить. Контрольное изображения имеет невысокую разрешающую способность, содержит избыточную информацию, не являющуюся необходимой, или содержит неполную информацию. Кроме того, такой способ проверки не может гарантировать того, что водитель получает минимальную дозу радиации. Следовательно, имеется потребность в системе для идентификации внешних профилей транспортных средств, которая может автоматически классифицировать транспортные средства в соответствии с их назначением для создания системы быстрой проверки с соответствующим сканирующим средством.
Обычная система идентификации транспортного средства для взимания платы за проезд измеряет только высоту и длину транспортного средства, чтобы выбрать ставку оплаты на основании размера транспортного средства. Однако известная система идентификации транспортного средства не может классифицировать транспортное средство по назначению и не может отличить грузовик от легкового автомобиля.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для устранения по меньшей мере части из указанных выше недостатков прототипа целью настоящего изобретения является создание способа и системы для идентификации движущихся объектов и способа и системы для проверки движущихся объектов путем радиационного формирования изображения, которые могут автоматически идентифицировать типы транспортных средств, нормально движущихся в определенном диапазоне скоростей, и применять разные режимы управления сканированием и проверкой транспортного средства в зависимости от его типа. Типы транспортных средств определяются, и транспортные средства проверяются автоматически, без необходимости для водителей покидать транспортные средства. Доза радиации, полученная водителями, минимальна, а информация, содержащаяся в изображении, является полной.
Согласно одному аспекту настоящего изобретения, предлагается способ идентификации движущегося объекта, содержащий шаг, на котором движущийся объект заезжает в проход, шаг, на котором измеряют скорость движущегося объекта, шаг, на котором с одной стороны прохода испускают световые лучи, шаг, на котором на другой стороне прохода принимают световые лучи, не перекрытые движущимся объектом, шаг, на котором определяют профиль по меньшей мере одной части движущегося объекта на основе принятых лучей света и измеренной скорости движущегося объекта, и шаг, на котором идентифицируют тип движущегося объекта, сравнивая профиль по меньшей мере одной части движущегося объекта с информацией о движущихся объектах, заранее введенной в запоминающее устройство.
Согласно другому аспекту настоящего изобретения, предлагается система для идентификации движущегося объекта, содержащая проход, сквозь который проходит движущийся объект, устройство для измерения скорости движущегося объекта, светоизлучающее устройство и устройство приемника света, в котором светоизлучающее устройство расположено на одной стороне прохода для излучения света внутрь прохода, а устройство приемника света расположено на другой стороне прохода для приема световых лучей, не перекрытых движущимся объектом, устройство для определения профиля, выполненное с возможностью определять профиль по меньшей мере одной части движущегося объекта на основе световых лучей, принятых устройством приемника света и скорости движущегося объекта, измеренной устройством для измерения скорости, и идентифицирующее устройство, выполненное с возможностью определять тип движущегося объекта путем сравнения профиля по меньшей мере одной части движущегося объекта с информацией, заранее введенной в запоминающее устройство.
Согласно другому аспекту настоящего изобретения, предлагается способ проверки движущегося объекта путем радиационного формирования изображения, содержащий вышеописанный способ идентификации движущегося объекта, а также шаг, на котором определяют, подлежит ли движущийся объект проверке путем радиационного формирования изображения, и на основе идентифицированного типа движущегося объекта определяют порядок, в котором движущийся объект должен быть проверен путем радиационного формирования изображения.
Согласно еще одному аспекту настоящего изобретения, предлагается система для проверки движущегося объекта путем радиационного формирования изображения, содержащая вышеописанную систему для идентификации движущегося объекта и устройство для проверки путем формирования изображения сканированием, выполненное с возможностью определять на основе идентифицированного типа движущегося объекта, подлежит ли движущийся объект проверка путем радиационного формирования изображения, или нет.
Управление по настоящему изобретению отличается тем, что на входе и на выходе прохода установлены индукционные катушки, на обеих сторонах прохода рядом с корпусом ускорительной камеры установлены оптическое детектирующее устройство и работающий в реальном времени радар для определения скорости, и на обеих сторонах прохода на соответствующем расстоянии от выходной щели ускорителя в направлении выхода из прохода установлены фотоэлектрические выключатели. Управляющий логический контроллер сканирования синтетически оценивает информацию, такую как о положении транспортных средств, количестве транспортных средств в проходе, состоянии движения транспортных средств и т.п. на основании изменения состояния соответствующих датчиков, и управляет работой сканирующей системы так, чтобы не допустить облучения водителя, испуская лучи для сканирования, и останавливая сканирование. Работающий в реальном времени радар определяет скорость движения транспортного средства и выдает на ускоритель импульс включения сканирования. Ускоритель, детектор и формирователь изображения выполняют сканирование для формирования изображения на основе импульса включения сканирования, полученного путем измерения скорости. Для ограничения дозы облучения, которой подвергается среда вокруг оборудования, до величины, установленной нормативами, используется экранирующее средство. В настоящем изобретении используется серия способов управления для обеспечения безопасности водителей.
Наряду с вышеописанной концепцией управления в настоящем изобретении используются соответствующие способы управления сканированием для разных транспортных средств, поэтому информация о проверяемых транспортных средствах является полной, контрольные изображения имеют высокую разрешающую способность и доза радиации, полученная водителями, минимальна. Настоящее изображение может существенно улучшить разрешающую способность изображений проверяемых транспортных средств, расширить количество типов проверяемых изображений и существенно снизить дозу облучения, получаемую водителями. Поэтому устройство для быстрой проверки путем радиационного формирования изображений используется на контрольных пунктах магистральных дорог.
Далее следует более подробное описание настоящего изобретения со ссылками на приложенные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
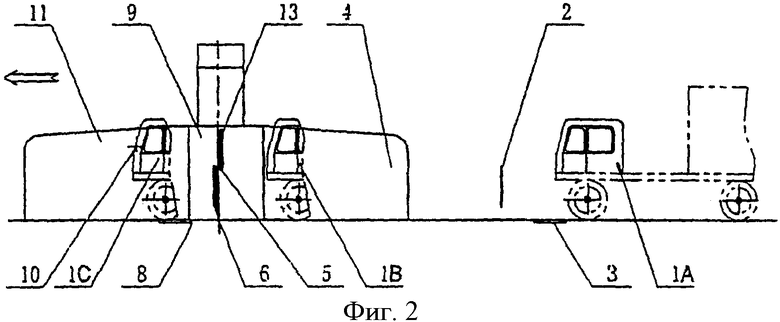
Фиг.1 - блок-схема системы для идентификации движущегося объекта по варианту настоящего изобретения;
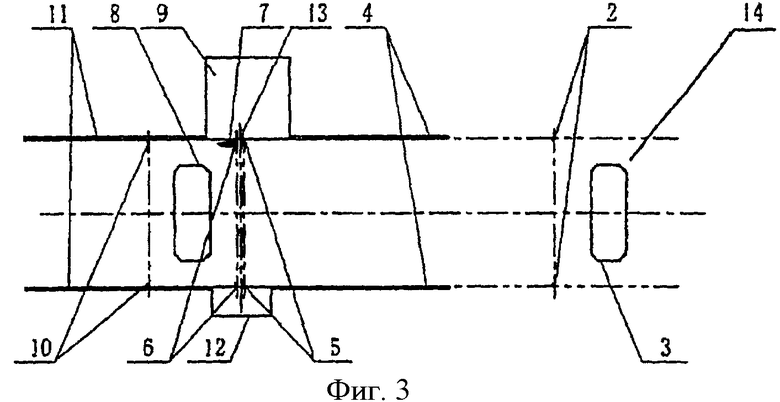
фиг.2 - схема структуры системы для идентификации движущегося объекта по варианту настоящего изобретения;
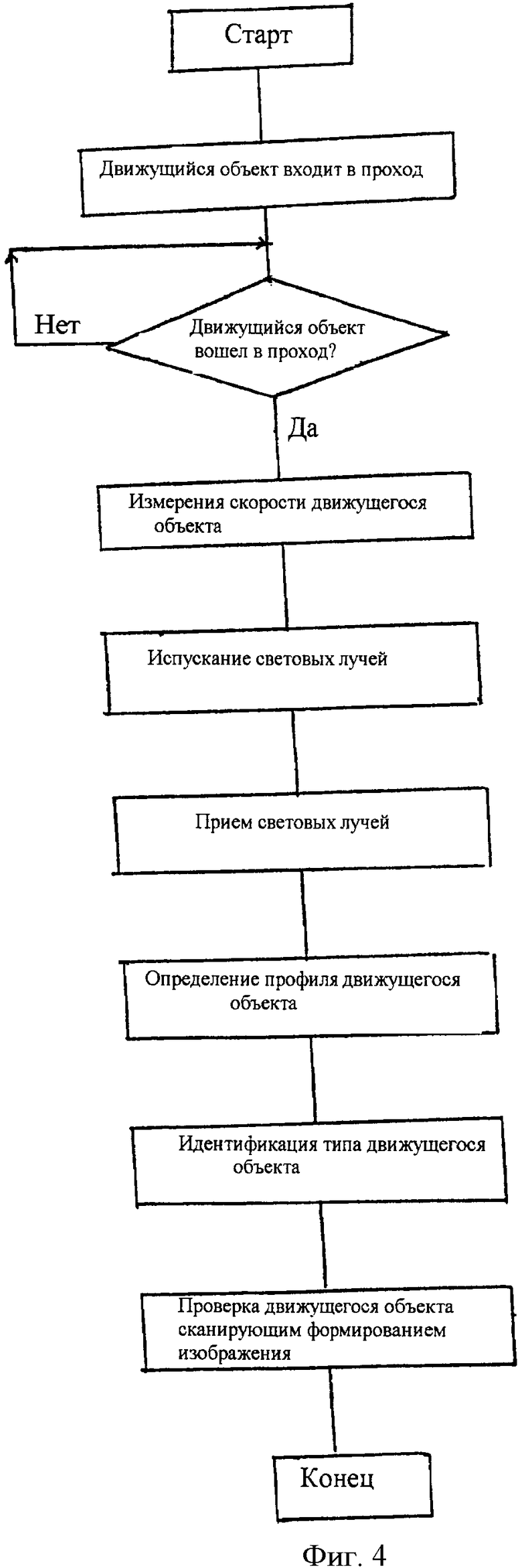
фиг.3 - схематический вид сверху по фиг.1; и
фиг.4 - блок-схема способа идентификации движущегося объекта по типу транспортного средства.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее следует подробное описание иллюстративного варианта структуры и процесса работы устройства для проверки транспортных средств по настоящему изобретению со ссылками на фиг.1-2.
На фиг.1 представлена блок-схема системы для идентификации движущегося объекта и система для быстрой проверки движущегося объекта путем радиационного формирования изображения по настоящему изобретению. Система для идентификации движущихся объектов содержит проход, по которому проходит подлежащий проверке объект, например контейнеровоз; устройство для измерения скорости движущегося объекта; светоизлучающее устройство и устройство приемника света, где светоизлучающее устройство установлено на одной стороне прохода для излучения лучей света внутрь прохода, а устройство приемника света расположено на другой стороне прохода для приема лучей света, проходящих сквозь движущийся объект; устройство для определения профиля, выполненное с возможностью определять профиль по меньшей мере одной части движущегося объекта на основе лучей света, принятых устройством приемника света, и скорости движущегося объекта, определенной устройством для измерения скорости; и устройство идентификации, выполненное с возможностью определять тип движущегося объекта путем сравнения профиля по меньшей мере одной части движущегося объекта, определенного устройством для определения профиля, с информацией о транспортных средствах, заранее введенной в запоминающее устройство. Например, устройство для идентификации определяет, является ли движущийся объект контейнеровозом, грузовиком, легковым автомобилем или пешеходом.
Более конкретно, как показано на фиг.2 и 3, в системе для идентификации движущегося объекта по настоящему изобретению проход 14, в котором проверяется движущийся объект, например контейнеровоз, может устанавливаться в точках, в которых проверяются и идентифицируются приезжающие и уезжающие грузовые автомобили, например, на таможне, в доке, на контрольном посту в аэропорте и на контрольных постах магистральных дорог. Быстродействующие фотоэлементы 2 световой завесы и наземные индукционные катушки 3 для определения входа транспортных средств в проход установлены на входе в проход. Предпочтительно, быстродействующие фотоэлементы 2 световой завесы установлены на стойках на обеих сторонах прохода, а наземная индукционная катушка 3 внедрена под поверхность земли как первый выключатель на входе (на правой стороне фиг.2) в проход. Фотоэлементы 2 световой завесы и наземная индукционная катушка 3 взаимодействуют для определения, входит или нет транспортное средство в проход и для подсчета транспортных средств, вошедших в проход с помощью первого счетчика. Первый счетчик может находиться в быстродействующих фотоэлементах 2 световой завесы и/или в наземной индукционной катушке 3, или может быть расположен в комнате управления, или может быть установлен отдельно.
В проходе расположены радар 7 для определения скорости транспортного средства и комната управления (не показана). Радар 7 для определения скорости движущегося объекта, подлежащего проверке, в этом варианте может быть установлен на внешней стенке камеры 9 ускорителя рядом с проходом 9. Альтернативно, радар для определения скорости может быть заменен другим устройством датчика, который определяет скорость движущегося объекта, измеряя смещение и время смещения движущегося объекта. Комната управления является центром всей системы. Управляющее устройство, расположенное в комнате управления, может быть электрически соединено с другими электронными устройствами в системе для приема электрических сигналов от других электронных устройств и для посылки сигналов на другие электронные устройства для управления их рабочим состоянием.
Вертикальные экранирующие стенки 4 и 11 расположены на обеих сторонах прохода, предотвращая проникновение сквозь них радиации. Вертикальные рычаги 12 датчика расположены снаружи от экранирующих стенок 4 и 11. Каждый оптический детектор 5 содержит излучатель и приемник и расположен на рычагах 12 детектора по обе стороны от прохода. Предпочтительно, этими обеими сторонами являются правая и левая стороны в направлении пересечения движущимся объектом. Альтернативно, этими обеими сторонами могут быть верхняя и нижняя стороны движущегося объекта. Световой луч, испускаемый излучателем, проходит сквозь щелевую структуру и сформирован в параллельный световой луч, проекция которого на плоскость, перпендикулярную и направлению излучения, и поверхности земли, может иметь форму прямой линии. Следует понимать, что параллельный световой луч должен иметь высоту, превышающую высоту движущегося объекта так, чтобы после того, как световой луч, испускаемый излучателем, будет перекрыт движущимся объектом, часть светового луча все же попадала в приемник. В этом случае высота части светового луча, перекрытого движущимся объектом, представляет высоту движущегося объекта. Другими словами, размер части светового луча, принятого приемником, соответствует высоте движущегося объекта.
Излучатель излучает параллельный световой луч в направлении объекта, движущегося в проходе через щелевую структуру. Не перекрытая движущимся объектом часть светового луча принимается приемником в направлении, перпендикулярном направлению движения объекта. Соответственно фотоэлектрические датчики преобразуют принятые световые сигналы в электрические сигналы с такой дискретизацией, чтобы получить набор сигналов. Следует понимать, что каждый набор сигналов соответствует высоте части движущегося объекта, которая сканируется световым лучом от излучателя во время дискретизации.
В системе для идентификации движущегося объекта по настоящему изобретению устройство для определения профиля предпочтительно расположено в комнате управления. Каждый набор дискретизированных сигналов, генерируемых приемником и сигналов, указывающих на скорость движущегося объекта, генерируемых радаром, передаются на устройство для определения профиля. Устройство для определения профиля определяет профиль по меньшей мере одной части движущегося объекта на основе каждого набора дискретизированных сигналов, генерируемых приемником и сигналов, генерируемых радаром.
Более конкретно, устройство для определения профиля начинает обрабатывать один набор дискретизированных сигналов, полученных от приемника с момента Т0. Из вышеприведенного описания известно, что высоту Н0 части движущегося объекта, сканируемого световым лучом от излучателя в момент Т0 дискретизации, можно определить непосредственно из одного набора дискретизированных сигналов, а ширина W0 части движущегося объекта, которая была просканирована в момент Т0 (т.е. расстояние, которое прошел объект с моменте Т0), равна 0. Поэтому площадь, просканированная в момент Т0, равна
S0=H0×W0=0
Когда движущийся объект сканируется второй раз в момент времени T1, и высоту H1 сканируемой части движущегося объекта в момент времени Т1 дискретизации можно определить непосредственно из второго набора дискретизированных сигналов, предполагая, что объект движется равномерно со скоростью V1, ширину W1 части движущегося объекта, просканированной с момента Т0, можно определить как произведение скорости V движения на разницу во времени между моментами T1 и Т0, т.е.
W1=V×(Т1-Т0)
Следовательно площадь, просканированная с момента Т0 времени, равна
S1=H1×W1=H1×V×(T1-T0)
Аналогично, площадь части движущегося объекта, просканированной с момента Tn-1, когда сканирование выполняется в момент Tn, можно определить следующим образом:
Sn=Hn×Wn=Hn×V×(Tn-Tn-1)
Таким образом, можно наложить друг на друга n просканированных площадей при n-кратной дискретизации, чтобы получить профиль, подобный просканированному движущемуся объекту.
Система для идентификации движущегося объекта по настоящему изобретению далее содержит запоминающее устройство для хранения информации о частичных профилях движущихся объектов. Информация, хранящаяся в запоминающем устройстве, может быть информацией о профилях особых участков транспортных средств, например о головных участках транспортных средств или боковых участках пешеходов. К транспортным средствам относятся транспортные средства, перевозящие пассажиров, или грузовики, такие как контейнеровозы, грузовики, автобусы и легковые автомобили. Когда вся система для идентификации движущегося объекта налажена, информацию о профилях особых участков таких транспортных средств получают способом проекции и вводят в запоминающее устройство. Эти особые участки соответствуют частичным профилям движущихся объектов, которые следует получить при идентификации движущегося объекта. Например, и особые профили, и частичные профили являются профилями головных участков транспортных средств. В случае пешеходов, получают профиль всего пешехода. Кроме того, информацию о транспортных средствах, введенную в запоминающее устройство, можно обновлять, когда на рынке появляются транспортные средства с новыми профилями.
Идентифицирующее устройство сравнивает профиль движущегося объекта, определенный устройством для определения профиля, с информацией о транспортных средствах, ранее введенной в запоминающее устройство, по очереди, под управлением управляющего устройства, пока профиль движущегося объекта (например, контейнеровоза), определенный устройством для определения профиля, не будет совпадать с информацией о движущемся объекте (например, контейнеровозе), ранее введенной в запоминающее устройство. В результате определяется конкретный тип движущегося объекта, проходящего через проход 14. Например, движущимся объектом является контейнеровоз.
Кроме того, если определен конкретный тип движущегося объекта, например, если движущимся объектом является контейнеровоз, то управляющее устройство включает сканирующее устройство 13 для получения изображения, для облучения контейнера, тем самым начиная проверку груза, перевозимого контейнеровозом. Таким образом, формируется система для проверки движущегося объекта путем радиационного формирования изображения по настоящему изобретению. Если идентифицированным движущимся объектом является автобус, легковой автомобиль, пешеход и т.п., то система управления не включает сканирующий формирователь изображения, который не испускает пучок радиации. В одном варианте сканирующий формирователь 13 изображения расположен на стенке камеры 9 ускорителя по обе стороны прохода 14.
Дополнительно, система для идентификации движущегося объекта по настоящему изобретению далее содержит, например, регулятор, расположенный в управляющем устройстве, который регулирует частоту, с которой приемник преобразует принятый световой луч в электрический сигнал, то есть интервал между двумя замерами, на основании скорости движущегося объекта, определенной радаром. Следовательно, частота дискретизации приемника соответствует скорости движущегося объекта.
Кроме того, дополнительные быстродействующие фотоэлементы 10 световой завесы установлены на экранирующих стенках по обе стороны от прохода 14 и наземная индукционная катушка 8 установлена под поверхностью земли в проходе 14 рядом с выходом из него (фиг.2). Быстродействующие фотоэлементы 10 световой завесы и наземная индукционная катушка 8 взаимодействуют для определения, вышло ли проверяемое транспортное средство из прохода или нет, и подсчета на втором счетчике количества транспортных средств, вышедших из прохода. Второй счетчик может быть расположен в быстродействующих фотоэлементах 6 световой завесы, и/или в наземной индукционной катушке 8, или может быть расположен в комнате управления, или может быть установлен отдельно.
Сканирующим формирователем изображения могут быть устройства в любой форме, которые проверяют объект, испуская радиационные лучи, такие как рентгеновские лучи и гамма-лучи, особенно обычные радиационные формирователи изображения для проверки контейнеров. Сканирующий формирователь изображения содержит ускоритель для испускания радиационных лучей для сканирования движущегося объекта, такого как проверяемое транспортное средство, которое может регулировать частоту радиационных лучей и тем самым управлять частотой сканирования транспортного средства на основе скорости транспортного средства, определенной радаром 7 под управлением управляющего устройства; детектор для приема радиационных лучей, проникающих сквозь движущийся объект, проверяемый детектором; средства экранирования радиации, обеспечивающие соответствие количества радиационных лучей вокруг оборудования установленным ограничениям, чтобы защитить работников, которые могут подойти к оборудованию, от поражения радиацией.
В вышеописанном варианте настоящего изобретения описаны быстродействующие фотоэлементы 2, 10 световой завесы и наземные индукционные катушки 3, 8, определяющие вход и выход транспортного средства в проход и из прохода, но настоящее изобретение не ограничивается этими элементами. Например, можно использовать только один из фотоэлементов световой завесы и одну из наземных индукционных катушек для определения входа транспортного средства в проход или выхода транспортного средства их прохода. Следует пояснить, что в соответствии со свойствами наземной индукционной катушки, наземная индукционная катушка может генерировать сигнал обнаружения движущегося объекта (положительный сигнал) только когда площадь контакта между объектом, движущимся в проходе 14, и наземной индукционной катушкой достигнет определенной величины.
Кроме того, фотоэлементы 2, 10 световой завесы можно заменить обычным фотоэлектрическими детекторами. Альтернативно, наземную индукционную катушку 3, 8 можно заменить по меньшей мере одним элементом из ряда, содержащего фотоэлектрический датчик, пьезоэлектрический датчик, электронный датчик, микроволновый датчик, ультразвуковой датчик и датчик давления.
Со ссылками на фиг.1, согласно другому аспекту настоящего изобретения, предлагается способ идентификации движущегося объекта. Способ содержит шаг (S10) заезда движущегося объекта, такого как контейнеровоз, грузовик, автобус или легковой автомобиль, в проход 14; шаг (S20) измерения скорости движущегося объекта в проходе 14 устройством для измерения скорости, таким как радар 7, и шаг (S30) испускания светового луча излучателем с одной стороны прохода в направлении движущегося объекта. Проекция световых лучей на плоскость, перпендикулярную как направлению излучения, так и поверхности земли, может иметь форму прямой линии или плоской линии, имеющей высоту.
На шаге (S40) приема светового луча световые лучи, не перекрытые движущимся объектом, принимают на приемнике на другой стороне прохода, и сигналы световых лучей преобразуют в электрические сигналы множеством фотоэлектрических датчиков, расположенных на приемнике. В этом случае высота световых лучей, перекрытых движущимся объектом, представляет высоту движущегося объекта, и преобразованные электрические сигналы соответствуют высоте части движущегося объекта, которая была просканирована световыми лучами от излучателя в момент замера. Кроме того, на шаге приема светового луча частоту, с которой принятые световые лучи преобразуют в электрические сигналы, регулируют на основе скорости движущегося объекта так, чтобы частота преобразования соответствовала измеренной скорости движущегося объекта.
Далее, на шаге (S50) определения профиля определяют профиль по меньшей мере одной части движущегося объекта, используя устройство для определения профиля, на основе электрических сигналов, генерируемых приемником, и измеренной скорости движущегося объекта.
На шаге (S60) идентификации найденный профиль по меньшей мере одной части по очереди сравнивают посредством устройства для идентификации с информацией о профилях соответствующих частей движущихся объектов, которая заранее была введена в запоминающее устройство, пока не будет определено, что профиль движущегося объекта (например, контейнеровоза) соответствует информации о движущемся объекте (например, контейнеровозе), заранее введенной в запоминающее устройство. В результате определяют конкретный тип движущегося объекта, проходящего по проходу 14. Например, движущийся объект является контейнеровозом.
Дополнительно, предлагается способ проверки движущегося объекта путем радиационного формирования изображения. Способ содержит шаги, на которых, например, определяют тип движущегося объекта вышеописанным способом идентификации, движущегося объекта, и шаг (70) проверки, при котором определяют путем сканирования с помощью формирователя изображения, идентифицированного по типу движущегося объекта, следует ли проверять движущийся объект способом радиационного формирования изображения. Если идентифицированным движущимся объектом является автобус, легковой автомобиль, пешеход и т.п., то управляющее устройство не включает сканирующий формирователь изображения на испускание излучения. Если идентифицированным движущимся объектом является грузовик, такой, как контейнеровоз, то управляющее устройство включает сканирующий формирователь изображения на испускание радиационного луча. Кроме того, способ проверки путем радиационного формирования изображения определяют по конкретному типу грузовика. Например, если движущимся объектом является контейнеровоз, то время задержки будет дольше, чтобы контейнеровоз проверялся после того, как его кабина пройдет через область сканирования радиационным лучом, тем самым осуществляется защита его водителя. Если движущимся объектом является крытый фургон, время задержки будет меньше.
Способ идентификации движущегося объекта и способ проверки движущегося объекта радиационным формированием изображения по настоящему изобретению далее содержат шаг (S11), на котором определяют, вошел ли движущийся объект, такой как транспортное средство, в проход, или нет. Если определено, что движущийся объект вошел в проход, начинается процедура идентификации.
Далее следует описание рабочего процесса по настоящему изобретению со ссылкой на пример идентификации и проверки транспортного средства, входящего в проход.
Когда количество транспортных средств в проходе равно нулю, система находится в режиме ожидания. Когда одно транспортное средство 1А движется к проходу, сначала активируется наземная индукционная катушка 3, которая вместе с быстродействующими фотоэлементами 2 световой завесы определяет вход транспортного средства в проход и направление его движения. Если транспортное средство движется в проход, первый счетчик, указывающий на количество транспортных средств в проходе, увеличивается на 1, радар 7 измеряет скорость движения транспортного средства, и система переходит в режим готовности. Когда транспортное средство движется вперед, оптический детектор 5 измеряет характеристики внешнего профиля транспортного средства в реальном масштабе времени. Система определяет, является ли проходящее транспортное средство контейнеровозом, грузовиком, или автобусом, на основании отличительных характеристик или характеристик внешнего профиля транспортного средства и на основании этого определения выбирает стратегию сканирования. Для контейнеровоза система выбирает стратегию, при которой сканируется эффективная длина контейнера так, чтобы не генерировать избыточной информации. Для крытого грузовика система выбирает стратегию, при которой система начинает сканирование только после того, как кабина выйдет из плоскости луча и достигнет положения на безопасном расстоянии от этой плоскости, чтобы обеспечить безопасность водителя. Для автобуса система выбирает стратегию, при которой сканирование не проводится или проводится с допустимой дозой, если это допускается законами и правилами. Когда кабина пройдет через область сканирования, система отслеживает рабочее состояние ускорителя в реальном масштабе времени так, чтобы ускоритель не смог неожиданно испустить луч. Когда транспортное средство выходит из прохода, второй счетчик, показывающий количество транспортных средств в проходе, увеличивается на 1. Когда величины первого счетчика и второго счетчика не равны, сканирующий формирователь изображения установки для проверки удерживается в состоянии готовности. Когда эти две величины на счетчиках равны, сканирующий формирователь изображения переходит в режим ожидания.
Альтернативно, первый счетчик и второй счетчик могут быть заменены приемником. То есть, когда транспортное средство попадает в проход, величина счетчика увеличивается на 1, а когда транспортное средство выходит из прохода, величина счетчика уменьшается на единицу. Пока величина на счетчике не равна нулю, система поддерживается в состоянии продолжения работы. Когда эта величина равна нулю, система переходит в режим ожидания.
Следует отметить, что в соответствии с техническим решением по настоящему изобретению, технические признаки вышеописанных вариантов, включая оптический детектор, могут быть заменены эквивалентными техническими признаками следующим образом. Например, внешний вид транспортного средства определяется множеством фотоэлектрических выключателей, расположенных с некоторыми интервалами. В общем виде, замена таких технических признаков техническими схемами, сформированными способами, известными специалистам, не должна считаться выходом из объема настоящей заявки.
Кроме того, хотя в вариантах настоящего изобретения излучатель и приемник света соответственно расположены на левой и правой сторонах прохода поперек направления движения транспортного средства, очевидно, что светоизлучающее устройство и устройство приемника света могут быть расположены сверху и снизу от транспортного средства. В этом случае одно из этих устройств может быть расположено на раме, а другое - под поверхностью прохода.
Хотя выше были описаны и показаны лишь некоторые варианты настоящего изобретения, специалистам понятно, что в эти варианты могут быть внесены изменения, не выходящие за пределы изобретательской идеи, объем которой определен формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОВЕРКИ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПУТЕМ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ВЫБОРОЧНОЙ ЗАЩИТЫ | 2006 |
|
RU2390007C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИСТОЧНИКОМ ИЗЛУЧЕНИЯ, УСТАНОВКА И СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ | 2006 |
|
RU2383883C2 |
| УСТАНАВЛИВАЕМАЯ НА ТРАНСПОРТНОМ СРЕДСТВЕ СИСТЕМА БЫСТРОЙ ПРОВЕРКИ | 2015 |
|
RU2624975C2 |
| ТЕЛЕЖКА-ТЯГАЧ СИСТЕМЫ ПРОВЕРКИ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ С АВТОМАТИЧЕСКИМ РАДИАЦИОННЫМ СКАНИРОВАНИЕМ | 2003 |
|
RU2252157C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ БЫСТРОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ И КОНТРОЛЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2340006C2 |
| СИСТЕМА ПЕРЕТАСКИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И СИСТЕМА КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2661299C1 |
| СИСТЕМА КОНТРОЛЯ АВИАЦИОННЫХ ГРУЗОВ ИЛИ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2291415C2 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ВИЗУАЛИЗАЦИИ С ОБРАТНОРАССЕЯННЫМ ПУЧКОМ ИЗЛУЧЕНИЯ | 2011 |
|
RU2532495C1 |
| ДЕТЕКТОРНОЕ УСТРОЙСТВО, СИСТЕМА КОМПЬЮТЕРНОЙ ТОМОГРАФИИ С ДВУМЯ УРОВНЯМИ ЭНЕРГИИ И СПОСОБ ДЕТЕКТИРОВАНИЯ, ИСПОЛЬЗУЮЩИЙ ЭТУ СИСТЕМУ | 2015 |
|
RU2599276C1 |
| СИСТЕМА КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2654912C1 |
Изобретение касается идентификации движущихся объектов. При проверке движущегося объекта перемещают объект в проход, измеряют его скорость движения, испускают световые лучи с одной стороны прохода и принимают на другой стороне прохода лучи, не экранированные движущимся объектом, и определяют профиль по меньшей мере части движущегося объекта. Тип движущегося объекта определяют сравнением определенного профиля с информацией о движущихся объектах в запоминающем устройстве. Определяют, подлежит ли объект проверке с помощью радиационных лучей, проникающих сквозь объект, и определяют способ, которым объект должен проверяться на основе идентифицированного типа движущегося объекта. Технический результат - обеспечение автоматического идентифицирования типов транспортных средств и выбора режима проверки транспортного средства в зависимости от его типа, а также исключение необходимости водителю покидать транспортное средство и уменьшение возможной дозы радиации. 2 н. и 10 з.п. ф-лы, 4 ил.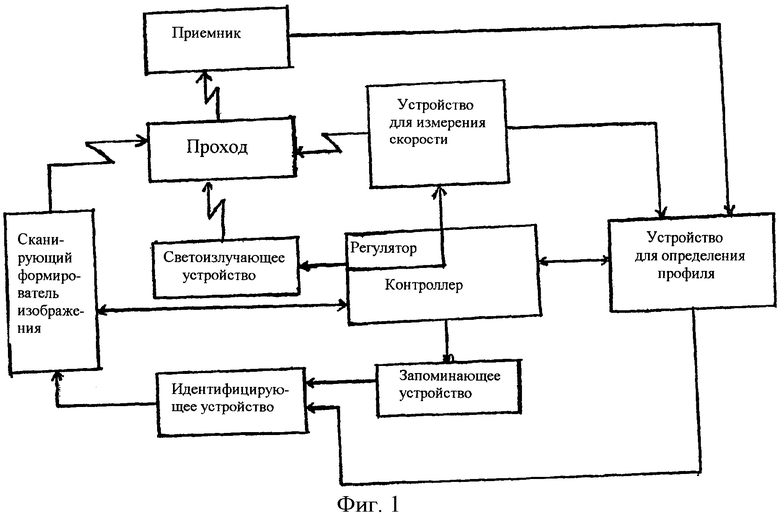
1. Способ проверки движущегося объекта путем радиационного формирования изображения с помощью радиационных лучей, проникающих сквозь движущийся объект, содержащий
этап, на котором перемещают движущийся объект в проход;
этап, на котором измеряют скорость движения движущегося объекта;
этап, на котором испускают световые лучи с одной стороны прохода;
этап, на котором на другой стороне прохода принимают световые лучи, не экранированные движущимся объектом;
этап, на котором определяют профиль по меньшей мере одной части движущегося объекта на основании принятых световых лучей и измеренной скорости движущегося объекта;
этап идентификации, на котором определяют тип движущегося объекта посредством сравнения профиля по меньшей мере одной части движущегося объекта с заранее сохраненной в запоминающем устройстве информацией о движущихся объектах; и
этап определения, на котором определяют, подлежит ли движущийся объект проверке способом радиационного формирования изображения с помощью радиационных лучей, проникающих сквозь движущийся объект, и определяют способ, которым движущийся объект должен проверяться путем радиационного формирования изображения с помощью радиационных лучей, проникающих сквозь движущийся объект, на основе идентифицированного типа движущегося объекта.
2. Способ по п.1, в котором на этапе приема световых лучей частоту преобразования, с которой принятые световые лучи преобразуют в электрические сигналы, регулируют на основе скорости движущегося объекта так, чтобы преобразованная частота соответствовала измеренной скорости движущегося объекта.
3. Способ по п.1, в котором на этапе приема светового луча принятые световые лучи преобразуют в электрические сигналы.
4. Способ по п.1, в котором на этапе перемещения движущегося объекта в проход способ далее содержит этап, на котором определяют, вошел движущийся объект в проход или нет.
5. Способ по п.1, в котором проекция испускаемых световых лучей на плоскость, перпендикулярную направлению испускания, имеет форму прямой линии.
6. Способ по п.4, в котором излучаемые световые лучи являются параллельными.
7. Способ по п.1, в котором одна сторона и другая сторона являются правой и левой стороной соответственно в направлении, поперечном направлению движения движущегося объекта, или верхней стороной и нижней стороной соответственно движущегося объекта.
8. Система для проверки движущегося объекта путем радиационного формирования изображения с помощью радиационных лучей, проникающих сквозь движущийся объект, содержащая
проход, сквозь который проходит движущийся объект;
устройство для измерения скорости движущегося объекта;
светоизлучающее устройство и устройство приемника света, причем светоизлучающее устройство расположено на одной стороне прохода для испускания лучей света внутрь прохода, а устройство приемника света расположено на другой стороне прохода для приема лучей света, не экранированных движущимся объектом,
устройство для определения профиля, выполненное с возможностью определять профиль по меньшей мере одной части движущегося объекта на основе световых лучей, принятых устройством приемника света, и скорости движущегося объекта, измеренной устройством для измерения скорости,
идентифицирующее устройство, выполненное с возможностью определения типа движущегося объекта путем сравнения профиля по меньшей мере одной части с информацией о движущихся объектах, заранее сохраненной в запоминающем устройстве; и
сканирующее устройство проверки для формирования изображения, выполненное с возможностью определять, подлежит ли движущийся объект проверке путем радиационного формирования изображения с помощью радиационных лучей, проникающих сквозь движущийся объект, на основе идентифицированного типа движущегося объекта.
9. Система по п.8, дополнительно содержащая регулятор для регулировки частоты преобразования, с которой устройство приемника света преобразует полученные световые лучи в электрические сигналы на основе скорости движущегося объекта, измеренной устройством для измерения скорости, так, чтобы частота преобразования соответствовала скорости движущегося объекта.
10. Система по п.8, в которой устройство приемника света преобразует принятые световые лучи в электрические сигналы.
11. Система по п.8, дополнительно содержащая устройство детектора, выполненное с возможностью определения, вошел ли движущийся объект в проход или нет.
12. Система по п.8, в которой одна сторона и другая сторона являются правой и левой стороной соответственно в направлении, поперечном направлению движения движущегося объекта, или верхней стороной и нижней стороной соответственно движущегося объекта.
| US 5392034 A, 21.02.1995 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| KR 20020076006 A, 09.10.2002 | |||
| JP 10105870 A, 24.04.1998 | |||
| RU 2002135349 A, 20.07.2004. | |||

