Изобретение относится к измерительной технике и может быть использовано для измерения и регистрации механических колебаний различных объектов, оборудования и сооружений, например на атомных электростанциях, а также на объектах с вредными условиями труда.
Большинство датчиков вибраций, как правило, индукционного типа, в которых упруго подвешенный или находящийся в контакте с контролируемом объектом подвижный элемент изменяет или наводит эдс в измерительной обмотке. Например, из свидетельства на полезную модель №6236 (МПК G01H 11/02, заявл. 14.03.1995, опубл. 16.03.1998) известен датчик вибраций, содержащий ферромагнитный корпус, закрепленную в нем измерительную катушку, инерционный элемент с постоянным магнитом, установленный на магнитном подвесе, включающем два постоянных магнита, размещенных соосно на противоположных торцах корпуса. Инерционный элемент снабжен двумя дополнительными постоянными магнитами, размещенными вдоль его оси по обе стороны от основного магнита с возможностью взаимодействия с постоянным магнитом подвеса, при этом все указанные магниты ориентированы одноименными полюсами навстречу друг другу, а основной магнит инерционного элемента охвачен магнитопроводом, выполненным в виде стакана с внутренним торцовым буртиком и полюсным наконечником, в радиальном зазоре между которыми размещена измерительная катушка. Недостатками данного датчика являются сложная конструкция датчика, необходимость тщательного подбора постоянных магнитных деталей с одинаковыми магнитными свойствами, узкий частотный диапазон регистрации механических колебаний, отсутствие возможности определения линейных перемещений, низкая надежность.
Кроме того, из уровня техники известны датчики, основанные на измерении вибрации с использованием оптических средств: например устройство для контроля параметров вибрации по авторскому свидетельству СССР №962768 (МПК G01H 9/00, заявл. 27.03.1981, опубл. 30.09.1982), принятое за прототип. Известное устройство содержит цилиндрический корпус, жестко связанный нижним основанием с поверхностью контролируемого объекта, цилиндрический инерционный элемент, соосно расположенный в корпусе и связанный с ним шарнирно и с помощью двух упругих элементов, источник света, формирующийся в узкий пучок и направляющийся через световод, расположенный внутри инерционного элемента, и приемник света, расположенный в цилиндрическом корпусе напротив вывода световода.
Недостатками данного устройства являются сложность изготовления, низкая точность и надежность, обусловленные тем, что источник света расположен внутри корпуса и подвержен влиянию вибраций.
Изобретением решается задача повышения надежности, точности, объективности работы датчика, а также уменьшение веса, габаритных размеров датчика и упрощение его конструктивного выполнения.
Для получения такого технического результата предлагается датчик вибраций и перемещений, содержащий прозрачный цилиндрический корпус, заполненный жидкостью и запаянный в верхней части. Цилиндрический инерционный элемент, выполненный с равными по длине конусообразными концами, погружен в жидкость и находится во взвешенном положении за счет дополнительного груза, который расположен в нижней половине инерционного элемента. Источник света и приемник света выполнены в виде трех пар излучающих диодов инфракрасного диапазона и приемных фотодиодов, установлены для фиксации перекрытия конусообразными концами инерционного элемента инфракрасного излучения, проходящего от излучающих диодов к соответствующим приемным фотодиодам, расположенным на внешней стороне корпуса соосно и диаметрально противоположно друг другу. Первая и вторая пары излучающих диодов и приемных фотодиодов установлены выше уровней вершин соответственно нижнего и верхнего конусов, образующих нижний и верхний конусообразные концы инерционного элемента, на 10% от значения высоты упомянутых конусов для регистрации вибраций. Третья пара излучающего диода и приемного фотодиода установлена выше второй пары излучающего диода и приемного фотодиода для регистрации перемещений. Все излучающие диоды и приемные фотодиоды подключены к блоку управления и регистрации вибраций и перемещений.
Изобретение иллюстрируется чертежами, на которых изображены: на фиг.1 - конструкция вертикального датчика вибраций и перемещений, на фиг.2 - конструкция горизонтального датчика вибраций и перемещений, на фиг.3 - структурная схема датчика вибраций и перемещений, на фиг.4 - пример схемы включения диодов, на фиг.5 - примеры сигналов вибраций (в) и перемещения (п), на фиг.6 - пример диаграммы спектрального состава вибрации и перемещения.
Датчик вибраций и перемещений содержит корпус (1) (см. фиг.1), инерционный элемент (2), излучающие диоды инфракрасного (ИК) диапазона А, В, С, приемные фотодиоды А', В', С', груз (3) для инерционного элемента (2). Корпус (1) является цилиндрическим, прозрачным, заполнен жидкостью, запаян в своей верхней части. В качестве прозрачного материала, из которого выполнен корпус (1) датчика, можно использовать стекло или прозрачный плексиглас. Жидкость, заполняющую корпус, подбирают индивидуально по плотности под конкретные эксплуатационные условия: например можно использовать воду с различным содержанием соли. Внутри корпуса (1) соосно размещен инерционный элемент (2), выполненный цилиндрическим с равными по длине конусообразными концами (т.е. с равными по высоте конусами, образующими конусообразные концы инерционного элемента (2)). Материал инерционного элемента (2) может быть выбран из условия хорошей плавучести, непроницаемости и простоты его обработки, это может быть пробка, полиэтилен и т.п. При этом поперечное сечение корпуса (1) датчика имеет вид окружности с внутренним диаметром не более 10 мм и выполняется с толщиной стенки не более 1 мм. Высота корпуса (1) может быть не более 50 мм. Высота инерционного элемента (2) может быть около 35 мм, а длина конусной части инерционного элемента (т.е. высота конуса, образующего конусообразную часть инерционного элемента) может быть 10 мм. Диаметр инерционного элемента (2) должен быть меньше внутреннего диаметра корпуса (1) не более чем на 0,5 мм. Для утяжеления инерционного элемента (2) можно использовать груз (3) из свинца, позволяющий инерционному элементу (2) находиться в жидкости во взвешенном состоянии и обеспечивающий его плавное перемещение при механических колебаниях. Груз (3) должен находиться в нижней половине инерционного элемента (2) таким образом, чтобы отклонение оси инерционного элемента (2) было не более 3° от воображаемой центральной оси, проходящей через стеклянный корпус датчика (1) и конусообразные концы инерционного элемента (2) (см. фиг.1).
Кроме того, поперечное сечение корпуса датчика может иметь вид квадрата с шириной внутренней стенки не более 8 мм. Размеры инерционного элемента для квадратного сечения корпуса датчика выполняются из таких же условий.
Отличительной особенностью датчика является то, что способ, заложенный в его реализацию, позволяет использовать его как для регистрации вертикальных, так и горизонтальных механических колебаний. Для горизонтального датчика вибраций груз (3) располагается строго посередине длины инерционного элемента (2), как показано на фиг.2, чтобы избежать горизонтального перекоса инерционного элемента (2) при перемещениях.
Источник и приемник инфракрасного излучения датчика выполнены в виде трех пар диодов: излучающих диодов А, В, С инфракрасного диапазона и приемных фотодиодов А', В', С'. В качестве излучающих диодов ИК излучения могут быть использованы фосфид-галлиевые мезадифузионные, либо арсенид-галлиевые эпитаксиальные диоды типов АЛ 106 А, Б, В, 3АЛ 107 А, Б и подобные. В качестве фотодиодов могут быть использованы диоды, подобные ФД256. Каждая пара излучающего диода и приемного фотодиода установлена на внешней стороне корпуса (1) датчика на определенной для каждой пары линии, перпендикулярной оси корпуса, диаметрально противоположно. Такое расположение обеспечивает возможность фиксации перекрытия конусообразными концами инерционного элемента (2) инфракрасного излучения, проходящего от излучающих диодов к соответствующим приемным фотодиодам.
При этом первая пара А-А' излучающего диода и приемного фотодиода установлена выше уровня нижнего конусообразного конца инерционного элемента (2) на 10% от значения высоты нижнего конуса, образующего конусообразный конец инерционного элемента (2). Например, при высоте конуса, образующего нижний конусообразный конец инерционного элемента (2), равной 10 мм, первая пара А-А' излучающего диода и приемного фотодиода установлена выше уровня нижнего конусообразного конца инерционного элемента на 1 мм.
Вторая пара В-В' излучающего диода и приемного фотодиода установлена выше уровня верхнего конусообразного конца инерционного элемента на 10% от значения высоты конуса, образующего верхний конусообразный конец инерционного элемента (2). Например, при высоте конуса, образующего верхний конусообразный конец инерционного элемента (2), равной 10 мм, вторая пара В-В' излучающего диода и приемного фотодиода установлена выше уровня верхнего конусообразного конца инерционного элемента на 1 мм.
Третья пара С-С' излучающего диода и приемного фотодиода установлена выше второй пары В-В' излучающего диода и приемного фотодиода на несколько миллиметров (например, на 5 мм).
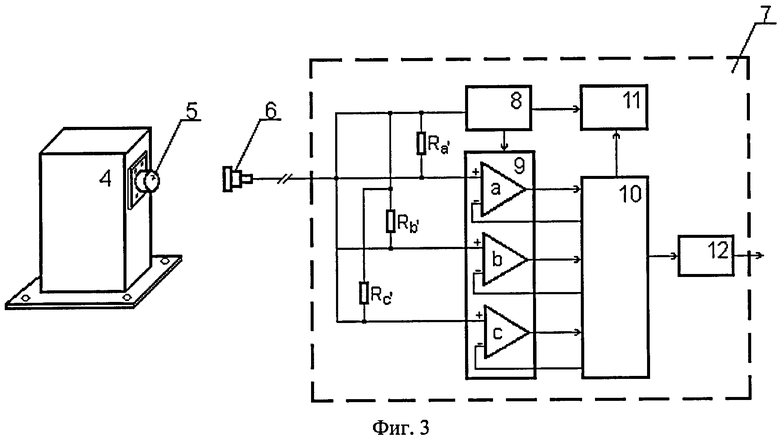
Пары излучающих диодов инфракрасного диапазона и приемных фотодиодов А-А', В-В', С-С' могут работать на свету, но для того, чтобы показания данных фотоприемников были стабильными и не изменялись от внешней освещенности, корпус (1) датчика с парами диодов укладывают в прочный пластмассовый футляр (4), заливают компаундом и плотно закрывают крышкой (см. фиг.3). В боковой стенке футляра (4) устанавливают блочный разъем (5), к которому подпаивают проводники от диодов, и подключают кабельный разъем (6) с кабелем от блока (7) управления и регистрации датчика.
Электрические сигналы с первой и второй пар диодов А-А' и В-В' соответственно служат для регистрации вибраций, а электрический сигнал третьей пары С-С' служит для определения величины перемещения контролируемого объекта как в вертикальном, так и в горизонтальном положениях датчика.
На фиг.3 представлена структурная схема блока (7) управления и регистрации (БУР) датчика вибраций и перемещений. БУР (7) представляет собой функционально законченное устройство, которое состоит из источника стабилизированного питания (8), входного трехканального модуля (9) усилителей сигналов фотодиодов датчика, контроллера (10), модуля индикации с жидкокристаллическим индикатором (11) и модуля цифровой связи с внешними устройствами (12). Источник стабилизированного питания (8) обеспечивает стабилизированное двухполярное напряжение питания для работы всех модулей БУР (7), а также обеспечивает запитку излучающих диодов ИК диапазона током до 50 мА, и содержит нагрузочные сопротивления Ra', Rb' и Rc' для приемных фотодиодов А', В', С'. Сигналы приемных фотодиодов поступают на положительные входы усилителей входного трехканального модуля (9), а на их отрицательные входы подаются отрицательные напряжения компенсации входных сигналов с цифроаналоговых преобразователей (ЦАП) контроллера (10). Коэффициент усиления входных усилителей (a, b, c) трехканального модуля (9) устанавливается не более 100. Кроме ЦАП контроллер (10) содержит двенадцатиразрядные аналого-цифровые преобразователи (АЦП) для оцифровывания сигналов приемных фотодиодов, собственную память для хранения рабочей программы и данных регистрации входных сигналов. Контроллер (10) по своим двум восьмиразрядным портам связан с модулем индикации (11), который предназначен для визуализации режимов работы БУР (7) и результатов измерений вибраций и перемещений. Также контроллер (10) способен обеспечить передачу данных через модуль цифровой связи с внешними устройствами (12) по каналу USB-2 на внешний компьютер (на фиг.3 не показан). В качестве контроллера (10) может быть использован процессор MSP430F149, а в качестве модуля индикации с жидкокристаллическим дисплеем (11) может быть использован модуль WH1604B-YGH-СТ.
На фиг.4 представлен фрагмент электрической схемы включения диодных пар на примере первой диодной пары А-А'. Из фиг.4 видно, что от напряжения в 5В источника стабилизированного питания (8) поступает ток через ограничивающее сопротивление Ra=100 Ом к диоду А ИК излучения, а к фотодиоду А' через нагрузочное сопротивление Ra'=10 кОм. Величина этих сопротивлений выбрана из требования стабильной работы в многодневном режиме. Диаметр линзы излучающего диода А ИК диапазона равен 1 мм, а диаметр линзы приемного фотодиода А' равен 2 мм. Расстояние между линзами диодов не более 12 мм. Когда приемный фотодиод не закрыт инерционным элементом (2), то он полностью открывается ИК излучением излучающего диода и на его выходе появляется сигнал в виде постоянного положительного напряжения. При этом режим работы диодных пар и номиналы резисторов подобраны таким образом, что на выходе фотодиода появляется максимальный сигнал в виде постоянного положительного напряжения величиной в 2,5 В. Характеристики излучающего диода А ИК диапазона во времени постоянны по мощности излучения и поэтому при полузакрытой линзе приемного фотодиода А' инерционным элементом (2) на его выходе будет сигнал положительной полярности величиной в 1,25 В. Для второй диодной пары В-В' выходной сигнал будет на 10% меньше максимального значения, т.е. порядка 2,25 В, а для диодной пары С-С', не имеющей затемнения от инерционного элемента (2), выходной сигнал приемного фотодиода С' будет иметь максимальное значение в 2,5 В. Поэтому напряжения компенсаций в нашем случае будут для приемного фотодиода А' минус 1,25 В, для приемного фотодиода В' минус 2,25 В, для приемного фотодиода С' минус 2,5 В. Компенсация начальных сигналов приемных фотодиодов при неподвижном положении датчика (в статике), т.е. отсечка постоянной составляющей, необходима для того, чтобы иметь возможность усиливать изменения сигналов приемных фотодиодов при вибрациях (в) и перемещениях (п) контролируемого объекта, как показано на диаграммах фиг.5. Здесь следует отметить положительный момент, заключающийся в том, что раз начальные токи фотодиодов компенсируются, то и точная установка диодных пар относительно конусообразных концов инерционного элемента (2) не существенна. Поэтому точность регистрации вибраций и перемещения зависит от аккуратности калибровки датчика. Это обстоятельство является несомненным достоинством предлагаемого изобретения.
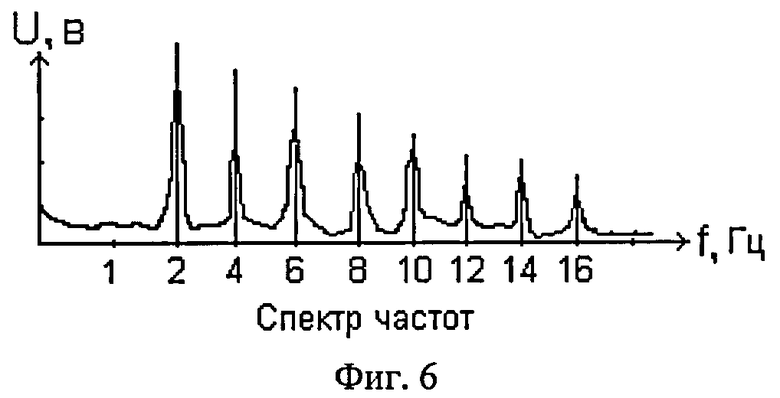
Контроллер (10) БУР (7) позволяет выводить на внешний персональный компьютер информацию для выполнения программы спектрального анализа вибраций контролируемого объекта, как показано на фиг.6. На фиг.6, как пример, показана основная частота колебания (вибрации) контролируемого объекта в 2 Гц и гармоники колебания, кратные двум герцам; 4 Гц, 8 Гц, 10 Гц, 12 Гц и т.д. Эта диаграмма может выводиться после регистрации сигналов колебаний диодных пар А-А', В-В' и обработки по специальной программе спектрального анализа.
Работа БУР (7) состоит из двух основных режимов - это калибровка датчиков измерительного узла и процедура непосредственной регистрации перемещений и вибрации контролируемого объекта. Обе программы работы БУР (7) записаны в собственную память контроллера (10).
Работа датчика вибраций и перемещений осуществляется в следующей последовательности.
Футляр (4), в который уложен корпус (1) датчика с инерционным элементом (2) и тремя парами диодов, жестко закрепляют нижним основанием на контролируемом объекте в вертикальном положении для регистрации вертикальных механических колебаний. Включают БУР (7) в режим регистрации, поданное напряжение питания моментально включает в работу три пары диодов А-А', В-В', С-С'. В неподвижном состоянии для первой пары диодов А-А' приемный фотодиод А' закрыт нижним конусом инерционного элемента (2) наполовину, поэтому сигнал на его выходе будет равен  максимального уровня. Для второй пары диодов В-В' верхний конус инерционного элемента (2) затемняет небольшой край лепестка ИК излучения, поэтому большая часть излучения излучающего диода В попадает на приемный фотодиод В'. Приемный фотодиод В' открывается, и на его выходе появляется сигнал, близкий к максимальному значению. Приемный фотодиод С' третьей пары диодов открыт полностью, поскольку находится вне близости инерционного элемента (2), и на его выходе появляется максимальный сигнал. Все три напряжения с нагрузочных сопротивлений Ra, Rb и Rc (фиг.3) приемных фотодиодов А', В' и С', которые находятся в источнике стабилизированного питания (8) БУР (см. фиг.2), поступают на положительные входы операционных усилителей (a, b, c) входного трехканального усилительного модуля (9), а на их отрицательные входы подаются отрицательные напряжения компенсации с выходов цифроаналоговых преобразователей (ЦАП) контроллера (10). Компенсация начальных сигналов фотодиодов (отсечка постоянной составляющей) в усилительном модуле (9) осуществляется до нулевого значения для каждого канала приемных фотодиодов А', В' и С'.
максимального уровня. Для второй пары диодов В-В' верхний конус инерционного элемента (2) затемняет небольшой край лепестка ИК излучения, поэтому большая часть излучения излучающего диода В попадает на приемный фотодиод В'. Приемный фотодиод В' открывается, и на его выходе появляется сигнал, близкий к максимальному значению. Приемный фотодиод С' третьей пары диодов открыт полностью, поскольку находится вне близости инерционного элемента (2), и на его выходе появляется максимальный сигнал. Все три напряжения с нагрузочных сопротивлений Ra, Rb и Rc (фиг.3) приемных фотодиодов А', В' и С', которые находятся в источнике стабилизированного питания (8) БУР (см. фиг.2), поступают на положительные входы операционных усилителей (a, b, c) входного трехканального усилительного модуля (9), а на их отрицательные входы подаются отрицательные напряжения компенсации с выходов цифроаналоговых преобразователей (ЦАП) контроллера (10). Компенсация начальных сигналов фотодиодов (отсечка постоянной составляющей) в усилительном модуле (9) осуществляется до нулевого значения для каждого канала приемных фотодиодов А', В' и С'.
Процесс непосредственной регистрации сигналов вибраций и перемещений осуществляется только после компенсации начальных сигналов приемных фотодиодов датчика на неподвижном объекте контроля, которая проводится только один раз перед измерениями вибраций и перемещений.
В изобретении используется известное и повсеместно используемое физическое свойство взаимодействия материалов через трение. В нашем случае это выглядит так. Внутренняя поверхность датчика стекло - жидкость - поверхность материала инерционного элемента. Для датчика используется слабая связь стекло - жидкость. Другими словами, стеклянный корпус датчика с установленными парами диодов при колебаниях перемещается быстрее относительно утяжеленного инерционного элемента, находящегося в жидкости.
При вибрациях контролируемого объекта приемные фотодиоды А' и В' вырабатывают сигналы следующим образом. При движении корпуса (1) датчика с закрепленными парами диодов вверх инерционный элемент (2) датчика остается в неподвижном взвешенном положении. Для первой диодной пары А-А' это приводит к тому, что нижний конусообразный конец инерционного элемента (2) увеличивает затемнение приемного фотодиода А', уменьшая его ток. Это изменение тока фотодиода А' усиливается входным усилителем (а) модуля (9) и регистрируется АЦП контроллера (10) БУР. Для второй пары диодов В-В' движение корпуса датчика вверх приводит к сползанию края ИК излучения с верхнего конусообразного конца инерционного элемента (2) датчика, увеличивая ток приемного фотодиода В'. Это изменение тока приемного фотодиода В' также усиливается входным усилителем (b) модуля (9) и регистрируется АЦП контроллера (10) БУР. При движении контролируемого объекта, а вместе с ним и корпуса (1) датчика, вниз, инерционный элемент (2) остается в неподвижном взвешенном положении. Для первой диодной пары А-А' это приводит к тому, что нижний конусообразный конец инерционного элемента (2) уменьшает затемнение приемного фотодиода А', увеличивая его ток. Это изменение тока усиливается входным усилителем (а) модуля (9) и регистрируется АЦП контроллера БУР. Для второй пары диодов В-В' движение корпуса датчика вниз приводит к тому, что верхний конусообразный конец инерционного элемента (2) срезает уже большую часть ИК излучения излучающего диода В. В результате ток приемного фотодиода В' уменьшается. Это изменение тока приемного фотодиода также усиливается входным усилителем (а) модуля (9) и регистрируется АЦП контроллера (10). Таким образом, по изменению усиленных сигналов приемных фотодиодов А' и В' осуществляется регистрация вибраций контролируемого объекта. При этом программа контроллера (10) определяет амплитудные значения механических колебаний контролируемого объекта и частоту их появления, т.е. проводит расчет спектрального анализа колебаний датчика.
Что касается третьей пары диодов С-С', то она вступает в работу только при больших амплитудах вибрации, когда конусообразный конец инерционного элемента (2) будет способен перекрывать ИК излучение излучающего диода С, а фотодиод С' будет способен это изменение регистрировать. При этом изменение тока приемного фотодиода С' будет пропорционально перемещению датчика. При вибрациях контролируемого объекта усиленные напряжения фотодиодов будут флюктуировать около нуля с частотой вибрации и амплитудой, пропорциональной этим колебаниям.
Калибровка датчика вибраций и перемещений предусматривает получение линейной зависимости величины сигнала датчика от определенного перемещения. Для калибровки датчика вибраций и перемещений применяется простая процедура, которая использует большое достоинство диодов ИК излучения, имеющих стабильную мощность излучения при ширине луча в 20°. Для этого необходимо зафиксировать датчик в неподвижном вертикальном положении на краю упругой металлической пластины длиной 15-20 см, жестко закрепленной с другого конца на рабочем столе, включить БУР (7) в режиме «калибровка». В этом режиме начальный ток приемного фотодиода С' компенсируется до нуля ЦАП контроллера (10). Затем следует резко потянуть вниз свободный конец упругой металлической пластины с установленным на ней датчиком. При возникшем колебании корпус датчика с установленными парами диодов С-С' опускается вниз относительно инерционного элемента (2), находящегося в жидкости во взвешенном состоянии. Верхний конусообразный конец инерционного элемента (2) начинает перекрывать ИК излучение излучающего диода С, что влечет уменьшение тока приемного фотодиода С'. Изменение значения фототока диода С' усиливается усилителем (с) модуля (9) и регистрируется АЦП контроллера (10) БУР. Для калибровки датчика достаточно провести три колебания датчика. Прошитая в контроллере (10) программа «калибровка» вычисляет среднюю величину сигнала приемного фотодиода С' по трем опытам. Затем по данным АЦП от нулевого значения (спокойном состоянии) до максимального сигнала (при калибровочных колебаниях) контроллер (10) строит калибровочную зависимость изменения сигнала приемного фотодиода С' от величины перемещения. Калибровочная характеристика заносится в память контроллера (10). Калибровка горизонтального датчика вибраций и перемещений осуществляется подобным образом при горизонтальном расположении датчика и обеспечении горизонтальных колебаний.
Использование двух пар регистрирующих диодов А-А' и В-В' повышает чувствительность, точность и надежность регистрации механической вибрации контролируемого объекта без относительно точной их установки относительно инерционного элемента (2) на внешней стороне корпуса датчика (1).
Предлагаемый датчик вибраций и перемещений предназначен для работы в обычных и химически активных условиях на больших расстояниях до контролируемого объекта (до 200 метров). Датчик может использоваться в помещениях с повышенным радиационным излучением, но для этого необходимо его корпус закрыть свинцовой защитой из листов толщиной 2-3 мм. В настоящее время получены хорошие результаты при лабораторных испытаниях датчика на стенде, обеспечивающем вертикальные перемещения до 5 мм и скорость вибрации до 100 Гц при перемещениях до 1000 мкм.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КОЛЕБАНИЙ | 2024 |
|
RU2840476C1 |
| МОДУЛЬ РЕГИСТРАЦИИ АВАРИЙНОЙ СИТУАЦИИ | 2004 |
|
RU2298231C2 |
| Способ дистанционного измерения концентрации газов в атмосфере | 2017 |
|
RU2679455C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ ТЕХНОЛОГИЧЕСКОЙ СИСТЕМЫ ПРИ ШЛИФОВАНИИ | 2000 |
|
RU2185949C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВИБРАЦИЙ ТЕХНОЛОГИЧЕСКОЙ СИСТЕМЫ ПРИ ШЛИФОВАНИИ | 2000 |
|
RU2188119C2 |
| Способ поражения воздушной цели боеприпасом с неконтактным датчиком цели | 2018 |
|
RU2688712C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК ИНФРАКРАСНЫХ МЕТОК | 1995 |
|
RU2106013C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОТПЕЧАТКА, ПОЛУЧЕННОГО НА ПОВЕРХНОСТИ МЕТАЛЛА ПРИ ЕГО ИСПЫТАНИИ НА ТВЕРДОСТЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210755C2 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |



Датчик содержит цилиндрический корпус, жестко связанный нижним основанием с поверхностью контролируемого объекта, и цилиндрический инерционный элемент, соосно расположенный в корпусе. Корпус выполнен прозрачным, заполнен жидкостью и запаян. Инерционный элемент, погруженный в жидкость и находящийся во взвешенном положении, выполнен с равными по длине конусообразными концами. Источник света и приемник света выполнены в виде трех пар излучающих диодов инфракрасного диапазона и приемных фотодиодов, установленных для фиксации перекрытия конусообразными концами инерционного элемента инфракрасного излучения, проходящего от излучающих диодов к соответствующим приемным фотодиодам, на внешней стороне корпуса диаметрально противоположно друг другу. Первая и вторая пары излучающих диодов и приемных фотодиодов установлены выше уровней вершин соответственно нижнего и верхнего конусов, образующих нижний и верхний конусообразные концы инерционного элемента, на 10% от значения высоты упомянутых конусов для регистрации вибраций. Третья пара излучающего диода и приемного фотодиода установлена выше второй пары для регистрации перемещений. Излучающие диоды и приемные фотодиоды подключены к блоку управления и регистрации вибраций и перемещений. Технический результат заключается в повышении надежности, точности, объективности работы датчика, а также в уменьшении веса, габаритных размеров и упрощении конструктивного выполнения датчика. 1 з.п. ф-лы, 6 ил.
1. Датчик вибраций и перемещений, содержащий цилиндрический корпус, жестко связанный нижним основанием с поверхностью контролируемого объекта, цилиндрический инерционный элемент, соосно расположенный в корпусе, источник и приемник света, отличающийся тем, что корпус, выполненный прозрачным, заполнен жидкостью и запаян, инерционный элемент, погруженный в жидкость и находящийся во взвешенном положении, выполнен с равными по длине конусообразными концами, источник света и приемник света выполнены в виде трех пар излучающих диодов инфракрасного диапазона и приемных фотодиодов, установленных для фиксации перекрытия конусообразными концами инерционного элемента инфракрасного излучения, проходящего от излучающих диодов к соответствующим приемным фотодиодам, на внешней стороне корпуса диаметрально противоположно друг другу, - первой и второй пар излучающих диодов и приемных фотодиодов, установленных выше уровней вершин соответственно нижнего и верхнего конусов, образующих нижний и верхний конусообразные концы инерционного элемента, на 10% от значения высоты упомянутых конусов, для регистрации вибраций, и третьей пары излучающего диода и приемного фотодиода, установленных выше второй пары излучающего диода и приемного фотодиода для регистрации перемещений, при этом излучающие диоды и приемные фотодиоды подключены к блоку управления и регистрации вибраций и перемещений.
2. Датчик по п.1, отличающийся тем, что дополнительно в инерционном элементе расположен груз для обеспечения его плавного перемещения при механических колебаниях.
| DE 3742478 A1, 29.06.1989 | |||
| Устройство для изучения колебательного движения тел в жидкой среде | 1969 |
|
SU446766A1 |
| ИЗМЕРИТЕЛЬ МОЩНОСТИ УЛЬТРАЗВУКОВОГО ИЗЛУЧЕНИЯ | 2005 |
|
RU2297603C2 |
| JP 60263816 A, 27.12.1985 | |||
| ИНЕРЦИАЛЬНЫЙ УГЛОМЕР | 1980 |
|
SU1840400A1 |

