Изобретение относится к области дистанционного измерения температуры движущегося объекта и может быть использовано в измерительной технике, метрологии, дистанционном зондировании.
Известно устройство бесконтактного измерения температуры (А.с. 1803747, МПК 5 G01J 5/60, 1987 г.), содержащее оптическую систему, приемник излучения, дифференциатор, два амплитудных детектора, оптический гетеродин, перестраиваемый оптический модулятор, устройство смешения оптических пучков, резонансный усилитель и блок деления.
Известен спектральный пирометр (патент US 4605314, МПК 4 G01J 5/24, 1986 г.), состоящий из электрического модуля и оптического модуля, который содержит передающий блок, блок спектрального разложения и блок детектора.
Недостатком известных устройств является зависимость измерений от угла направления на движущийся источник излучения, так как при изменении этого угла изменяется положение изображения спектра излучения на поверхности детектора спектра излучения, а стабилизация положения изображения спектра не производится, так как автоматическое визирование на объект не предусмотрено.
Наиболее близким к предлагаемому решению является способ, реализованный в устройстве бесконтактного измерения температуры движущегося объекта (патент RU 2213942, МПК 7 G01J 5/60, 2003 г.), заключающийся в оптическом приеме сигнала теплового излучения объекта, спектральном разложении сигнала, формировании изображения спектра излучения на поверхности матрицы приемников, сигналы с выходов которых обрабатываются процессорным блоком, выполненным с возможностью поиска максимального значения выходного сигнала приемника по матрице приемников, возможностью определения максимального значения производной выходных сигналов приемников по матрице приемников и возможностью вычисления температуры по отношению максимального значения производной выходных сигналов по матрице приемников к максимальному значению выходного сигнала приемника по матрице приемников.
Недостатком этого способа, в дополнение к указанному выше, является ограниченность точности измерений, так как при процессорной обработке для определения максимального значения сигнала по матрице приемников используется энергия только одного приемника, выработавшего максимальный сигнал.
Задачей изобретения является повышение точности дистанционного измерения температуры движущегося объекта путем введения автоматического визирования измерителя на движущийся объект и использования энергии всех приемников матрицы приемников.
Решение задачи достигается тем, в способ дистанционного измерения температуры движущегося объекта, заключающийся в оптическом приеме сигнала теплового излучения объекта, спектральном разложении сигнала, формировании изображения спектра излучения на поверхности матрицы приемников, сигналы с выходов которых обрабатывают процессорным блоком, введены аппроксимация сигналов матрицы приемников аппроксимантами банка данных функций Планка для множества температур, выбор наиболее точной аппроксиманты и вывод соответствующего ей значения температуры и погрешности ее определения, а также аппроксимация тех же сигналов матрицы приемников аппроксимантами банка данных для множества изображений объектов, выбор наиболее точной аппроксиманты и вывод соответствующего ей значения погрешности распознавания изображения объекта в виде сигнала управления приводом визирования с возможностью визирования оптической системы в направлении на движущийся объект.
Технический результат состоит в том, что повышается точность измерения температуры движущегося объекта за счет введения автоматического визирования по нулевому потоку спектрального разложения и использования для процессорной обработки энергии всех приемников матрицы приемников.
Способ может быть реализован в соответствии со структурной схемой, представленной на чертеже.
Структурная схема содержит оптическую систему 1, блок 2 спектрального разложения, матрицу 3 приемников, процессорный блок 4, банк 5 данных функций Планка для множества температур, банк 6 данных для множества изображений объектов и привод 7 визирования на движущийся объект.
Способ бесконтактного измерения тепловых данных движущегося объекта реализуется следующим образом. От источника излучения тепловой поток подают через оптическую систему 1 на блок 2 спектрального разложения, которым формируется изображение спектра излучения на поверхности матрицы 3 приемников (поток 1-го порядка) одновременно с оптическим изображением самого объекта (поток 0-го порядка). Сигналы с выходов матрицы 3 приемников обрабатываются процессорным блоком 4 для определения температуры Т движущегося объекта и для обеспечения непрерывного визирования оптической системы на движущийся объект.
Для определения температуры Т выполняют аппроксимацию сигналов матрицы 3 приемников каждой хранящейся в банке 5 данных аппроксимантой функций Планка P1…Pn, каждая из которых соответствует конкретной температуре объекта T1…Tn, выбирают аппроксиманту Pk с минимальной погрешностью аппроксимации δPk→min и выводят соответствующее ей значение температуры объекта Т=Tk и погрешности ее определения δТ≡δPk.
Для обеспечения непрерывного визирования оптической системы на движущийся объект, то есть отклонения направления визирования от оптической оси оптической системы на угол Δφ→0, выполняют аппроксимацию тех же сигналов матрицы 3 приемников каждой хранящейся в банке 6 данных аппроксимантой из множества изображений объектов O1…Om, выбирают аппроксиманту Ok с минимальной погрешностью аппроксимации δOk→min и выводят это значение погрешности распознавания изображения объекта в виде сигнала управления приводом визирования Δφ≡δOk с возможностью визирования оптической системы в направлении на движущийся объект.
Способ может быть реализован в устройствах, выполняемых из известных модулей и на элементной базе, применяемых в измерительной технике и метрологии. Конструктивное выполнение блоков 1…4 может совпадать с аналогичными блоками прототипа. Конструкции блоков 5, 6 памяти очевидны из уровня техники. Программное обеспечение процессорной обработки типовое. Конструктивное выполнение привода 7 визирования известно, например, по патенту РФ 2189049, G01S 3/78, 2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТЕПЛОВЫХ ДАННЫХ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2007 |
|
RU2421695C2 |
| СПОСОБ СПЕКТРОТЕРМОМЕТРИИ | 2020 |
|
RU2752809C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2002 |
|
RU2213942C1 |
| ПИРОМЕТР | 2020 |
|
RU2751091C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЯРКОСТНОЙ ТЕМПЕРАТУРЫ И ПИРОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2737606C1 |
| СПОСОБ ТЕПЛОВОГО КОНТРОЛЯ ДВИЖУЩИХСЯ НАГРЕТЫХ ТЕЛ | 2010 |
|
RU2418273C1 |
| СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ ПО ИХ ЦВЕТОВЫМ ХАРАКТЕРИСТИКАМ | 2019 |
|
RU2699751C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕЙСТВИТЕЛЬНОЙ ТЕМПЕРАТУРЫ И СПЕКТРАЛЬНОЙ ИЗЛУЧАТЕЛЬНОЙ СПОСОБНОСТИ ОБЪЕКТА | 2019 |
|
RU2727340C1 |
| СПОСОБ ТЕРМОГРАФИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324152C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЯРКОСТНОЙ ТЕМПЕРАТУРЫ ТЕПЛОВОГО ПОЛЯ ИССЛЕДУЕМОГО ОБЪЕКТА | 2014 |
|
RU2552599C1 |
Изобретение относится к области дистанционного измерения температуры движущегося объекта. Способ заключается в оптическом приеме сигнала теплового излучения объекта, спектральном разложении сигнала, формировании изображения спектра излучения на поверхности матрицы приемников, сигналы с выходов которых аппроксимируют аппроксимантами банка данных функций Планка для множества температур, выбирают наиболее точную аппроксиманту и выводят соответствующее ей значение температуры и погрешность ее определения. Аппроксимируют те же сигналы матрицы приемников с использованием банка данных для множества изображений объекта, выбирают наиболее точную аппроксиманту и выводят соответствующее ей значение погрешности распознавания изображения объекта в виде сигнала управления приводом визирования с возможностью визирования оптической системы в направлении на движущийся объект. Технический результат состоит в повышении точности измерения температуры движущегося объекта за счет введения автоматического визирования по нулевому потоку спектрального разложения и использования энергии всех приемников матрицы приемников. 1 ил.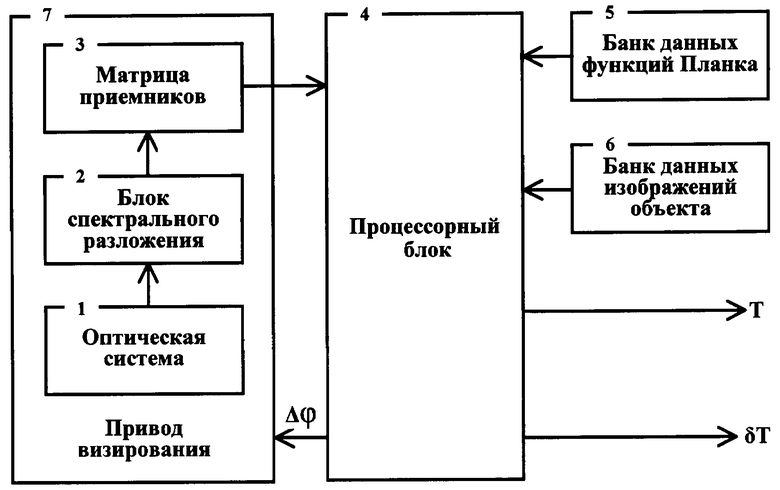
Способ дистанционного измерения температуры движущегося объекта, заключающийся в оптическом приеме сигнала теплового излучения объекта, спектральном разложении сигнала, формировании изображения спектра излучения на поверхности матрицы приемников, сигналы с выходов которых обрабатывают процессорным блоком, отличающийся тем, что изображение спектра излучения формируют одновременно с оптическим изображением движущегося объекта и обеспечивают непрерывное визирование оптической системы на движущийся объект путем управления приводом визирования, при этом аппроксимируют сигналы матрицы приемников аппроксимантами банка данных функций Планка для множества температур, выбирают наиболее точную аппроксиманту, выводят соответствующее ей значение температуры и погрешность ее определения и аппроксимируют те же сигналы матрицы приемников с использованием банка данных для множества изображений объекта, выбирают наиболее точную аппроксиманту и выводят соответствующее ей значение погрешности распознавания изображения объекта в виде сигнала управления приводом визирования.
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2002 |
|
RU2213942C1 |
| ШИРОКОПОЛЬНАЯ ИНФРАКРАСНАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2001 |
|
RU2189049C1 |
| Устройство для бесконтактного измерения температуры | 1991 |
|
SU1803747A1 |
| US 4605314 A, 12.08.1986. | |||

