Предлагаемое изобретение относится к области электроизмерительной техники, более конкретно - к мостовым методам измерения на переменном токе параметров датчиков, и может быть использовано для измерения уровня диэлектрического вещества, в частности в системах управления расходованием топлива (СУРТ) изделий ракетно-космической техники (РКТ).
В качестве аналога выбран способ, описанный в [1]. Устройство, в котором реализован упомянутый способ, включает группу измерительных емкостных дискретных датчиков (ДД), рассредоточенных в пределах контролируемого диапазона, генератор переменного напряжения, два коммутатора, два преобразователя «ток-напряжение», вычитающее устройство, синхронный детектор, два компаратора, цифровой индикатор, два триггера, дифференциатор, тактовый генератор, две схемы совпадения, реверсивный счетчик импульсов и сумматор. Каждый измерительный ДД выполнен в виде двух плоскопараллельных конденсаторов с неодинаковыми геометрическими размерами, которые располагаются горизонтально и симметрично относительно средних уровней датчиков.
Указанные конденсаторы всех датчиков одним из электродов соединены между собой, образуя смежные плечи мостовой схемы. Операция формирования сигнала постоянной частоты для питания мостовой схемы выполняется с использованием генератора переменного напряжения. На выходе вычитающего устройства, являющемся выходом мостовой схемы, формируется сигнал разбаланса переменного тока, зависящий от разности плечевых сопротивлений моста и пропорциональный амплитуде сигнала постоянной частоты. Детектирование сигнала разбаланса осуществляется при помощи синхронного детектора, обеспечивающего зависимость текущего значения полярности продетектированного сигнала от совпадения фаз сигнала разбаланса и сигнала постоянной частоты. Операции суммирования, формирования сигнала разности, запоминания и сравнения с заранее выбранным пороговым значением выполняют в способе-аналоге с использованием сумматора, вычитающего устройства, реверсивного счетчика импульсов и компараторов. При этом обеспечивается формирование на входе цифрового индикатора цифрового сигнала, соответствующего ближайшему снизу номеру датчика, погруженного в контролируемую среду выше средней линии, которая в свою очередь определяется по изменению полярности продетектированного сигнала, соответствующего изменению знака разбаланса мостовой схемы.
Использование для реализации каждого ДД двух плоскопараллельных измерительных конденсаторов с неодинаковыми геометрическими размерами, включаемых в разные плечи мостовой схемы, позволяет существенно уменьшить влияние разброса диэлектрической проницаемости жидкости на результаты измерений. Кроме того, использование в рассматриваемом способе операций коммутации цепей измерительных конденсаторов позволяет при прохождении уровнем жидкости очередного ДД отключать конденсаторы, не относящиеся к соответствующему ДД, и таким образом исключать вносимую ими погрешность.
В то же время при создании способов измерения уровня для СУРТ средств выведения изделий РКТ возникает необходимость решения и ряда дополнительных задач, связанных с особенностями работы изделий РКТ:
1. Назначением указанных способов является определение моментов времени прохождения уровнями компонентов топлива (окислителя и горючего) заданных значений (измерительных точек, ИТ) при опорожнении топливных баков во время работы двигательной установки. Соответствующие ИТ (обычно от 8 до 32) определяют расположением емкостных ДД по высоте топливного бака. При этом в качестве компонентов топлива в жидкостных двигателях современных изделий РКТ используют жидкий кислород, жидкий водород и керосин, которые являются диэлектриками и имеют диэлектрическую проницаемость ε>1, а в качестве ДД - измерительные конденсаторы. О прохождении ИТ судят по изменению емкости соответствующего ДД.
2. Достижение заданных точности, надежности и диагностичности способов измерения уровня диэлектрического вещества должно осуществляться в условиях воздействия дестабилизирующих факторов, в т.ч. электрических помех и возмущений со стороны других подсистем системы управления, колебаний уровня жидкости (компонента топлива), технологического разброса характеристик ДД и компонентов топлива, влияния факторов перегрузки, температуры и скорости движения уровня жидкости в баке. При этом одной из традиционных задач при создании способов рассматриваемого типа является формирование текущей оценки (признака) достоверности выходной информации об уровне диэлектрического вещества. Решение указанной задачи позволяет исключить влияние недостоверной информации на работу СУРТ либо уменьшить кратность резервирования устройств, реализующих указанные способы, при построении отказоустойчивых систем.
3. Сигналы, содержащие информацию об уровне диэлектрического вещества, обычно передают в бортовую ЦВМ (БЦВМ) для решения задач синхронной выработки окислителя и горючего и прогнозирования времени выработки топлива из каждого бака. При этом возможно использование БЦВМ для решения и других сравнительно «медленных» задач (с циклом решения порядка 10…100 мс), обеспечивающих вторичную обработку указанных сигналов.
4. ДД размещаются в топливном баке и являются, по сути, элементами конструкции бака. Преобразователи сигналов датчиков и БЦВМ обычно располагают в приборном отсеке, т.е. на значительном расстоянии от датчиков. При этом разработка способов измерения уровня проводится с учетом необходимости минимизации объемно-массовых характеристик датчиков, преобразователей и линии связи между ними (при аппаратной реализации способов).
К недостаткам аналога с учетом особенностей решаемой задачи можно отнести сложность аппаратной реализации, обусловленную необходимостью использования для реализации N измерительных точек удвоенного количества (2·N) измерительных конденсаторов, имеющих разные геометрические размеры, двух коммутаторов, содержащих 2·N элементов коммутации, и 2·N+1 связей для соединения датчиков с преобразователем сигналов датчиков (что ухудшает объемно-массовые характеристики устройства, реализующего указанный способ), а также невозможность формирования признака достоверности отображаемой информации, что ограничивает функциональные возможности и область применения аналога. Кроме того, использование для реализации каждого ДД двух плоскопараллельных измерительных конденсаторов с неодинаковыми геометрическими размерами, включаемых в разные плечи мостовой схемы, приводит к немонотонной зависимости сигнала разбаланса в зоне ДД от уровня жидкости, что не позволяет использовать указанный сигнал для уменьшения влияния низкочастотных колебаний жидкости и приводит к дополнительной погрешности измерения.
В качестве второго аналога выбран «Фазовый способ измерения уровня топлива жидкостных ракет», описанный в [2, с.60, 61]. Способ реализуется на основе мостовой схемы, смежные плечи которой образованы двумя группами емкостных датчиков уровня, содержащими соответственно нечетные и четные датчики, с использованием операций формировании в плечах мостовой схемы сигналов путем воздействия на них сигналом постоянной частоты, сравнении величин сформированных в плечах мостовой схемы сигналов, формирования на выходе мостовой схемы сигнала разбаланса переменного тока, зависящего от разности плечевых сопротивлений и пропорционального амплитуде сигнала постоянной частоты, формирования в одном из плеч моста дополнительного эталонного значения комплексного сопротивления, сдвига по фазе на 90° сигналов, сформированных в плечах мостовой схемы, сравнения фазы сигнала разбаланса с фазой сигнала постоянной частоты и фиксации момента изменения фазы сигнала разбаланса на 180°. По указанному фиксированному моменту, соответствующему равенству комплексных сопротивлений мостовой схемы (балансу моста), определяют момент прохождения соответствующей ИТ. Для реализации N измерительных точек при аппаратной реализации рассматриваемого способа достаточно использования N измерительных конденсаторов и трех связей для соединения датчиков с преобразователем сигналов датчиков.
Минимизация погрешностей измерения в аналоге обеспечивается предварительным (до начала работы в составе изделия РКТ) выбором эталонного значения комплексного сопротивления из условия обеспечения в процессе последующей работы баланса мостовой схемы при достижении уровнем жидкости соответствующей ИТ, обычно - середины ДД (при номинальных значениях характеристик ДД и компонентов топлива и отсутствии дестабилизирующих факторов). Соответственно отклонения характеристик ДД и компонентов топлива от номинальных значений, обусловленные технологическим разбросом, воздействием факторов перегрузки, температуры и скорости движения уровня жидкости, а также колебания уровня жидкости в баке приводят в способе-аналоге к отклонению моментов баланса мостовой схемы относительно моментов прохождения уровнем жидкости середины ДД, что вызывает погрешность измерения, а невозможность формирования признака достоверности выходного сигнала ограничивает функциональные возможности и область применения способа. Кроме того, необходимость формирования в одном из плеч моста дополнительного эталонного значения комплексного сопротивления для настройки (до начала работы в составе изделия РКТ) начального разбаланса, как и сама необходимость такой настройки, усложняют рассматриваемый способ.
Наиболее близким по технической сущности и достигаемому положительному эффекту к заявленному является «Способ преобразования выходного сигнала моста с начальным неравновесным состоянием» [3, с.21]. Способ выполнен на основе мостовой схемы, смежные плечи которой образованы двумя группами емкостных датчиков уровня, содержащими соответственно нечетные и четные датчики, с использованием операций формирования сигнала постоянной частоты для питания мостовой схемы, формирования на выходе мостовой схемы сигнала разбаланса переменного тока, зависящего от разности плечевых сопротивлений и пропорционального амплитуде сигнала постоянной частоты, детектирования, дифференцирования и фильтрации указанного сигнала разбаланса. Результирующий выходной сигнал, соответствующий скорости изменения уровня жидкости в зоне ДД, и известное значение высоты ДД используют для определения времени прохождения уровнем жидкости участка высоты от верхней границы до геометрической середины датчика, которая в рассматриваемом случае соответствует КТ. При этом для определения момента прохождения уровнем жидкости КТ необходимо дополнительно определение момента времени t0 прохождения уровнем жидкости верхней границы датчика, соответствующего в рассматриваемом случае моменту начала формирования переднего фронта импульса результирующего выходного сигнала скорости. Обычно для определения момента t0 используется операция сравнения результирующего сигнала с пороговым значением. При этом для повышения точности фиксации момента t0 необходимо уменьшение порогового значения, в то время как для исключения ложной фиксации момента t0 из-за действия помех необходимо его увеличение. Т.е. возможность повышения точности определении t0 ограничена в рассматриваемом случае техническим противоречием между точностью и помехозащищенностью. Использование фильтрации не устраняет указанное техническое противоречие, поскольку увеличение степени фильтрации одновременно увеличивает искажение формы сигнала (в рассматриваемом случае делает передний фронт результирующего сигнала еще более пологим).
Начальное неравновесное состояние в прототипе достигается за счет введения в дифференциальное плечо нечетных ДД дополнительной емкости. При этом величина дополнительной емкости выбирается из условия неизменности знака разбаланса мостовой схемы во всем диапазоне изменения уровня диэлектрического вещества (с учетом технологического разброса параметров ДД и компонента топлива).
Кроме того, отклонения характеристик ДД и компонентов топлива от номинальных значений, обусловленные технологическим разбросом, воздействием факторов перегрузки и температуры, а также нестабильность амплитуды сигнала постоянной частоты (либо паразитной модуляции амплитуды с частотой огибающей, ниже нижней границы диапазона частот, в котором осуществляется фильтрация) вызывают изменения уровня выходного сигнала, что, в свою очередь, приводит к погрешности измерения моментов прохождения ИТ, а необходимость задания начального неравновесного состояния за счет введения в одно из дифференциальных плеч ДД дополнительной емкости, выбираемой из условия неизменности знака разбаланса мостовой схемы во всем диапазоне изменения уровня диэлектрического вещества, усложняют способ.
Таким образом, к недостаткам прототипа с учетом особенностей решаемой задачи можно отнести недостаточную точность формирования выходного сигнала, сложность, а также невозможность формирования признака достоверности выходного сигнала, что ограничивает функциональные возможности и область применения прототипа.
Задачей способа измерения уровня диэлектрического вещества является повышение точности его измерения, упрощение и расширение функциональных возможностей и области применения за счет формирования признака достоверности выходного сигнала.
Поставленная задача достигается за счет того, что в способе измерения уровня диэлектрического вещества на основе мостовой схемы, смежные плечи которой образованы двумя группами емкостных датчиков уровня, с использованием операций формирования сигнала постоянной частоты для питания мостовой схемы, формирования на выходе мостовой схемы сигнала разбаланса, детектирования и фильтрации указанного сигнала разбаланса, в отличие от прототипа сигнал разбаланса предварительно суммируют с сигналом постоянной частоты с заранее выбранными весовыми коэффициентами и дополнительно суммируют с сигналом постоянной частоты со вторыми заранее выбранными весовыми коэффициентами, отличающимися от первых, после чего производят детектирование и фильтрацию первого и второго просуммированных сигналов, причем текущее значение полярности каждого из сигналов, формируемых в процессе детектирования, определяют в зависимости от совпадения фаз соответствующего просуммированного сигнала и сигнала постоянной частоты, а полученные таким образом первый и второй отфильтрованные сигналы фиксируют и используют для измерения уровня диэлектрического вещества.
Кроме того, способ измерения уровня диэлектрического вещества отличается тем, что дополнительно формируют и фиксируют третий сигнал, соответствующий разности первого и второго фиксированных сигналов с третьими заранее выбранными весовыми коэффициентами, который сравнивают с заранее выбранными допусками, а результат сравнения используют для определения признака достоверности текущей информации об уровне диэлектрического вещества, дополнительно периодически формируют, фиксируют и используют для измерения уровня диэлектрического вещества сигнал относительной разности плечевых сопротивлений мостовой схемы Kp(tn), соответствующий отношению разности первого и второго фиксированных сигналов с четвертыми заранее выбранными весовыми коэффициентами к разности первого и второго фиксированных сигналов с пятыми заранее выбранными весовыми коэффициентами, а при отсутствии признака достоверности текущей информации текущему значению сигнала Kp(tn) присваивают ближайшее его предыдущее достоверное значение, дополнительно производят запоминание k текущих значений сигнала Kp(tn) и в каждом n-ном периоде времени формируют приращение ΔKp(tn) указанного сигнала относительной разности в соответствии с выражением
ΔKp(tn)=Kp(tn)-Kp(tn-k),
где n - номер текущего периода времени,
k - количество периодов времени, через которое определяется приращение,
после чего значение сигнала ΔKp(tn) сравнивают с заранее выбранными пороговыми значениями, a q текущих результатов сравнения запоминают и используют для определения признака ПКр(tn) достижения уровнем диэлектрического вещества соответствующего емкостного датчика, при этом указанный признак используют для измерения уровня диэлектрического вещества, дополнительно производят запоминание m текущих значений сигнала Kp(tn), при этом в случае фиксации признака ПКр(tn) в момент фиксации tn* производят формирование и запоминание m значений эталонного сигнала Si(tn), соответствующего известной модели изменения сигнала Kp(tn) при условии достижения уровнем диэлектрического вещества верхней границы емкостного датчика в момент времени tn*-i, производят сравнение m запомненных значений сигналов Kp(tn) и Si(tn) при значениях i, соответствующих условию
0≤i≤m-1,
причем по результатам сравнения указанных сигналов определяют момент времени достижения уровнем диэлектрического вещества верхней границы соответствующего емкостного датчика, который в свою очередь используют для измерения уровня диэлектрического вещества, при этом сигнал Si(tn) формируют с использованием кусочно-непрерывной функции, задаваемой разными аналитическими выражениями в интервалах времени до и после момента tn*-i.
Между совокупностью существенных признаков заявляемого объекта и достигаемым техническим результатом существует причинно-следственная связь, а именно:
1. Совокупность признаков, характеризующая использование операций суммирования сигнала разбаланса и сигнала постоянной частоты с двумя различными группами весовых коэффициентов, детектирования и фильтрации просуммированных сигналов и определения полярности каждого из сигналов, формируемых в процессе детектирования, в зависимости от совпадения фаз соответствующего просуммированного сигнала и сигнала постоянной частоты, с учетом соответствующей последовательности выполнения операций позволяет в отличие от прототипа сформировать два непрерывных (аналоговых) сигнала постоянного тока U1(t) и U2(t), каждый из которых линейно зависит от амплитуды сигнала разбаланса мостовой схемы и соответственно содержит информацию о реальной динамике прохождения уровнем жидкости каждого ДД.
Учитывая, что большинство неисправностей элементов, используемых при аппаратной реализации способа, приводит к искажению одного из сигналов U1(t) или U2(t), сравнение динамики изменения U1(t) и U2(t) позволяет оценивать достоверность указанных сигналов, что, в свою очередь, позволяет расширить функциональные возможности и область применения способа.
Кроме того, совокупность признаков, характеризующая использование операций определения полярности каждого из сигналов, формируемых в процессе детектирования, в зависимости от совпадения фаз соответствующего просуммированного сигнала и сигнала постоянной частоты, и фильтрации продетектированных сигналов непосредственно после выполнения операции детектирования, позволяет в отличие от прототипа расширить область линейной зависимости сигналов постоянного тока U1(t) и U2(t) от амплитуды сигнала разбаланса мостовой схемы на оба знака разбаланса, включая и зону изменения знака разбаланса (при прохождении состояния баланса), что, в свою очередь, позволяет исключить операцию задания начального неравновесного состояния (за счет введения в одно из дифференциальных плеч ДД дополнительной емкости, выбираемой из условия неизменности знака разбаланса мостовой схемы во всем диапазоне изменения уровня диэлектрического вещества), и таким образом упростить способ.
2. Совокупность признаков, характеризующая использование операций формирования и фиксации третьего сигнала, соответствующего разности первого и второго фиксированных сигналов с третьими весовыми коэффициентами, и сравнения третьего сигнала с заранее выбранными допусками, с учетом использования соответствующих ранее описанных операций, позволяет в отличие от прототипа формировать признак достоверности текущей информации об уровне диэлектрического вещества.
Рассмотрим указанную возможность более подробно. Сигналы постоянного тока U1(t) и U2(t) могут быть представлены в виде


где Uрм - сигнал постоянного тока, соответствующий по абсолютному значению - амплитуде сигнала разбаланса мостовой схемы, по полярности - знаку разбаланса мостовой схемы;
Uп - сигнал постоянного тока, соответствующий амплитуде сигнала постоянной частоты для питания мостовой схемы;
Крм1 и Кп1 - весовые коэффициенты при первом суммировании сигналов Uрм и Uп;
Крм2 и Кп2 - весовые коэффициенты при втором суммировании сигналов Upм и Uп.
При этом сигнал Uп может быть определен из выражений (1) и (2) в виде

где  и
и

- весовые коэффициенты при формировании сигнала Uп (третьи весовые коэффициенты).
Из выражения (3) видно, что сигнал Uп соответствует описанию третьего фиксированного сигнала.
Отклонение текущего значения сигнала Uп(t) от номинального определяется погрешностями реализации соответствующих операций, и при отсутствии отказов и сбоев элементов, обеспечивающих аппаратную реализацию способа, не должно превышать заранее известного значения, например 10%. Учитывая, что при формировании сигнала Uп(t) задействуются все электронные элементы, обеспечивающие аппаратную реализацию способа, указанный сигнал может быть использован в качестве тестового, а отклонение Uп(t) от номинального значения - в качестве оценки степени достоверности выходного сигнала.
При этом сравнение сигнала Uп(t) с заранее выбранными допусками позволяет формировать указанный признак достоверности текущей информации, соответствующий определенному уровню достоверности (задается выбором указанных допусков). Использование признака достоверности позволяет исключить влияние недостоверной информации на работу СУРТ либо уменьшить кратность резервирования устройства, реализующего предлагаемый способ, при построении отказоустойчивых систем. Возможность формирования признака достоверности выходного сигнала позволяет расширить функциональные возможности и область применения способа.
3. Совокупность признаков, характеризующая использование операций периодического формирования и фиксации сигнала относительной разности плечевых сопротивлений мостовой схемы Kp(tn), соответствующего отношению разности первого и второго фиксированных сигналов с четвертыми заранее выбранными весовыми коэффициентами к разности первого и второго фиксированных сигналов с пятыми заранее выбранными весовыми коэффициентами, с учетом использования соответствующих ранее описанных операций, позволяет в отличие от прототипа исключить погрешность, вызванную отклонением фактического значения амплитуды сигнала постоянной частоты от номинального значения.
Взаимосвязь между указанными совокупностью признаков и техническим результатом может быть показана следующим образом.
Значение сигнала Uрм зависит от разности плечевых сопротивлений моста и пропорционально амплитуде Uп сигнала постоянной частоты, используемого для питания мостовой схемы, что может быть записано в виде

где Кр - коэффициент (сигнал), зависящий от относительной разности плечевых сопротивлений и не зависящий от амплитуды Uп сигнала постоянной частоты. На физическом уровне указанный сигнал характеризует степень разбаланса собственно мостовой схемы.
Из выражений (1), (2) и (4) определим сигнал Кр.

Из выражения (5) видно, что сигнал Кр соответствует указанному фиксированному сигналу.
Периодическое (в каждом n-ном периоде времени) формирование в соответствии с выражением (5) сигнала Kр(tn) и использование его для измерения уровня диэлектрического вещества позволяет исключить влияние нестабильности амплитуды (либо паразитной модуляции амплитуды) сигнала постоянной частоты на результаты измерения уровня, что в свою очередь позволяет повысить точность измерения и упростить аппаратную реализацию сигнала постоянной частоты.
4. Признак, характеризующий использование операции присваивания текущему значению сигнала Kр(tn) при отсутствии признака достоверности ближайшего его предыдущего достоверного значения, с учетом использования соответствующих ранее описанных операций, позволяет исключить влияние кратковременных отказов, сбоев и импульсных помех на результаты измерения уровня и таким образом повысить точность и достоверность измерения уровня.
5. Совокупность признаков, характеризующая использование операций запоминания k текущих значений сигнала Kр(tn) и формирования в каждом n-ном периоде времени приращения ΔKр(tn) указанного сигнала в соответствии с выражением

где n - номер текущего периода времени,
k - количество периодов времени, через которое определяется
приращение,
с последующим сравнением значения сигнала ΔKp(tn) с заранее выбранными пороговыми значениями, запоминанием q текущих результатов сравнения, формированием признака ПKp(tn) достижения уровнем диэлектрического вещества соответствующего емкостного датчика с использованием указанных результатов сравнения и использованием признака ПKp(tn) для измерения уровня диэлектрического вещества с учетом использования соответствующих ранее описанных операций, позволяет исключить возможность ложной фиксации КТ (из-за действия помех) либо пропуска КТ и таким образом повысить точность и достоверность (помехозащищенность) измерения уровня.
6. Совокупность признаков, характеризующая использование операций запоминания m текущих значений сигнала относительной разности плечевых сопротивлений Kp(tn), формирования и запоминания m значений эталонного сигнала Si(tn), соответствующего известной модели изменения сигнала Kp(tn) при условии достижения уровнем диэлектрического вещества верхней границы емкостного датчика в момент времени tn*-i в случае фиксации признака ПКp(tn) в момент времени tn* и сравнения m запомненных значений сигналов Kp(tn) и Si(tn) при значениях i, соответствующих условию
0≤i≤m-1,
по результатам которого определяют момент времени достижения уровнем диэлектрического вещества верхней границы соответствующего емкостного датчика, который в свою очередь используют для измерения уровня диэлектрического вещества, при этом сигнал Si(tn) формируют с использованием кусочно-непрерывной функции, задаваемой разными аналитическими выражениями в интервалах времени до и после момента tn*-i, с учетом использования соответствующих ранее описанных операций позволяет определять момент времени t0 достижения верхней границы соответствующего ДД после фиксации признака ПКр(tn) с использованием сравнения сигнала Kp(tn) с соответствующим ему по форме эталонным сигналом Si(tn) на протяжении m периодов времени (вместо сравнения конкретного значения Kp(tn) с пороговым значением), что позволяет устранить техническое противоречие между точностью и помехозащищенностью определения t0 (увеличение периодов m времени сравнения позволяет одновременно повысить и точность, и помехозащищенность, при этом повышение помехозащищенности процесса фиксации признака ПKp(tn) за счет изменения пороговых значений не влияет на точность определения t0 благодаря разделению указанных операций) и таким образом повысить точность определения моментов времени t0 и соответственно точность измерения уровня.
Кроме того, использование указанных операций не требует дополнительной фильтрации и соответственно не вызывает дополнительного искажения формы сигнала Kp(tn).
На фиг.1 приведена функциональная схема одного из вариантов устройства, реализующего предлагаемый способ.
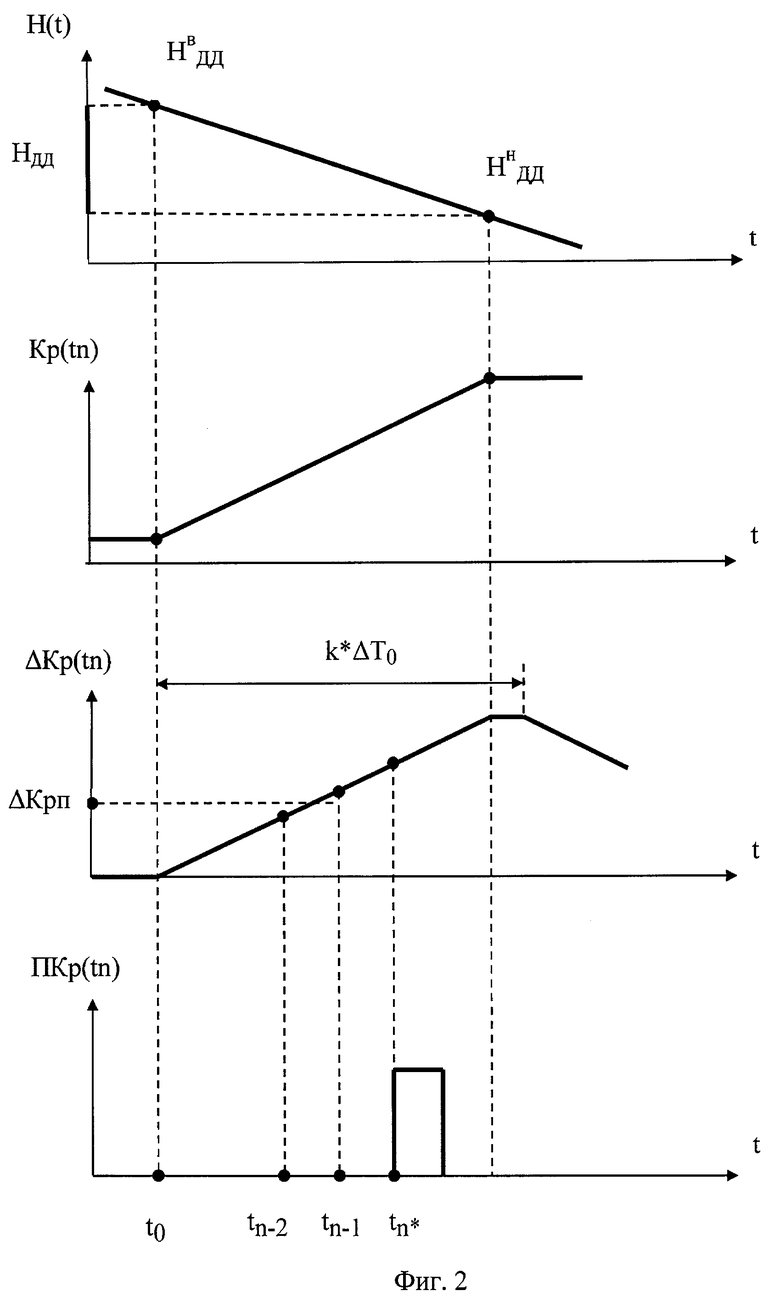
На фиг.2 приведена упрощенная временная диаграмма сигналов Kp(tn), ΔKp(tn) и ПKp(tn), формируемых в процессе измерения уровня диэлектрического вещества.
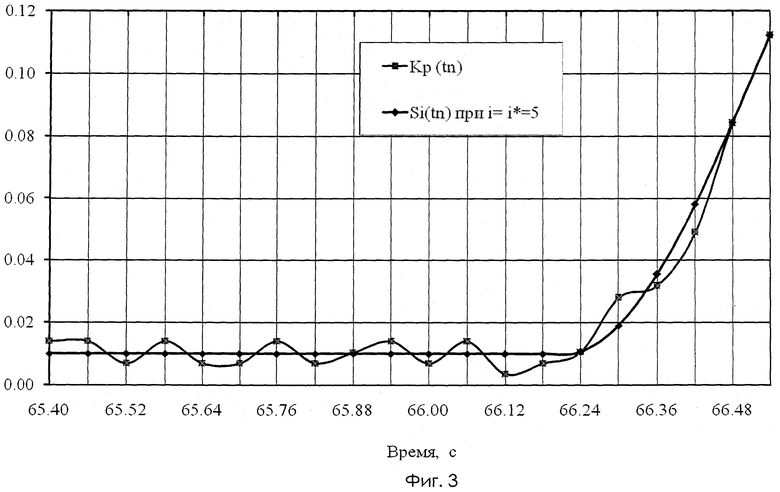
На фиг.3 приведен фрагмент реального процесса изменения сигнала Kp(tn) при прохождении уровня горючего через ДД, и соответствующий ему эталонный сигнал Si(tn), сформированный в соответствии с предлагаемым способом.
Схема устройства, реализующего предлагаемый способ, содержит две соединенных между собой группы 1 и 2 емкостных датчиков уровня, образующие смежные плечи мостовой 3 схемы, генератор 4 сигнала постоянной частоты, два сумматора 5 и 6, два синхронных 7 и 8 детектора, два фильтра 9 и 10 нижних частот и вычислительный 11 блок.
Два крайних (несоединенных между собой) вывода групп 1 и 2 емкостных датчиков уровня соответствуют выводам входной диагонали мостовой 3 схемы, с которыми соединены первый и второй противофазные относительно шины «Корпус» выходы генератора 4, образующие два других плеча мостовой 3 схемы. Соответственно точка соединения групп 1 и 2 емкостных датчиков уровня и шина «Корпус» являются выводами выходной диагонали, а упомянутая точка соединения групп 1 и 2 - выходом мостовой 3 схемы, на котором формируют сигнал разбаланса, соответствующий уровню разбаланса моста и пропорциональный амплитуде сигнала постоянной частоты генератора 4.
Измерение уровня диэлектрического вещества осуществляют следующим образом.
1. Сигнал разбаланса суммируют с сигналом постоянной частоты с первыми и вторыми весовыми коэффициентами при помощи сумматоров 5 и 6. При этом использование разных выходов генератора 4, обеспечивающего формирование сигнала постоянной частоты, учитывают при задании весовых коэффициентов суммирования.
Детектирование первого и второго просуммированных сигналов с определением (заданием) полярности каждого из сигналов, формируемых в процессе детектирования, в зависимости от совпадения фаз соответствующего просуммированного сигнала и сигнала постоянной частоты (т.н. фазочувствительное детектирование) осуществляют в рассматриваемом варианте аппаратной реализации с использованием синхронных 7 и 8 детекторов, выполненных на основе электронных коммутаторов и обеспечивающих изменение полярности просуммированных сигналов с частотой генератора 4 сигнала постоянной частоты.
Выполняют фильтрацию продетектированных сигналов с использованием фильтров 9 и 10, что обеспечивает подавление возникающих в процессе детектирования пульсаций с частотой сигнала постоянной частоты.
Использование фазочувствительного детектирования и фильтрации позволяет расширить область линейной зависимости сигналов постоянного тока U1(t) и U2(t) от амплитуды сигнала разбаланса мостовой схемы на оба знака разбаланса, включая и зону изменения знака разбаланса (при прохождении состояния баланса), что в свою очередь позволяет исключить операцию задания начального неравновесного состояния (за счет введения в одно из дифференциальных плеч ДД дополнительной емкости, выбираемой из условия неизменности знака разбаланса мостовой схемы во всем диапазоне изменения уровня диэлектрического вещества) и таким образом упростить способ.
Описанная последовательность операций обеспечивает формирование сигналов постоянного тока U1(t) и U2(t), содержащих информацию о реальной динамике прохождения уровнем жидкости каждого ДД и описываемых выражениями (1) и (2).
Учитывая, что большинство неисправностей элементов, используемых при аппаратной реализации способа, приводит к искажению одного из сигналов U1(t) или U2(t), сравнение динамики изменения U1(t) и U2(t) позволяет оценивать достоверность указанных сигналов, что в свою очередь позволяет расширить функциональные возможности и область применения способа.
2. Каждый из сигналов U1(t) и U2(t) линейно зависит от амплитуды Upм сигнала разбаланса мостовой схемы (с учетом знака разбаланса) и амплитуды UП сигнала постоянной частоты.
Учитывая, что сигнал Uрм в свою очередь пропорционален сигналу Uп, причем коэффициент пропорциональности Кр в соответствии выражением (4) имеет физический смысл сигнала относительной разности плечевых сопротивлений и характеризует уровень разбаланса собственно мостовой схемы, совместное решение (1), (2) и (4) относительно Uп и Кр позволяет формировать указанные сигналы Uп и Кр в соответствии с выражениями (3) и (5). При этом периодическое формирование сигналов Uп и Кр в соответствии с выражениями (3) и (5) осуществляют в рассматриваемом варианте аппаратной реализации с использованием вычислительного 11 блока, выполненного на основе ЦВМ, а преобразование сигналов U1(t) и U2(t) в цифровую форму осуществляют входными преобразователями ЦВМ. При этом параметры фильтрации выбирают дополнительно с учетом необходимости подавление помех на частотах, превышающих частоту периодического формирования сигналов Uп и Кр.
Формируют сигнал Uп в соответствии с выражением (3).
Из приведенной на фиг.1 схемы видно, что при формировании сигнала Uп(t) задействуются все электронные элементы, обеспечивающие аппаратную реализацию способа, что позволяет использовать указанный сигнал в качестве тестового, а отклонение Uп(t) от номинального значения - в качестве оценки степени достоверности выходного сигнала. При этом отклонение текущего значения сигнала Uп(t) от номинального определяется погрешностями реализации соответствующих операций, и при отсутствии отказов и сбоев элементов, обеспечивающих аппаратную реализацию способа, не должно превышать заранее известного значения, например 10%.
Значение сигнала Uп(t) сравнивают с верхним и нижним допусками. При этом допуска выбирают за пределами указанного рабочего диапазона, например, на уровнях 80 и 120% от номинального значения, что позволяет формировать признак достоверности текущей информации об уровне диэлектрического вещества, соответствующий определенному уровню достоверности (задается выбором указанных допусков).
При фиксации отклонения значения сигнала Uп(t) от номинального за пределы указанного диапазона признак достоверности снимают.
Использование признака достоверности позволяет исключить влияние недостоверной информации на работу СУРТ либо уменьшить кратность резервирования устройства, реализующего предлагаемый способ, при построении отказоустойчивых систем. Возможность формирования признака достоверности выходного сигнала позволяет расширить функциональные возможности и область применения способа.
3. Периодически, в каждом n-ном периоде времени, формируют сигнал относительной разности плечевых сопротивлений Kp(tn) в соответствии с выражением (5).
Из сигнала выражения (5) видно, что сигнал Kp(tn) не зависит от амплитуды сигнала постоянной частоты. Соответственно использование его для измерения уровня диэлектрического вещества позволяет исключить влияние нестабильности амплитуды (либо паразитной модуляции амплитуды) сигнала постоянной частоты на результаты измерения уровня, что в свою очередь позволяет повысить точность измерения и упростить аппаратную реализацию сигнала постоянной частоты.
4. Устранение влияния недостоверной информации, вызванной кратковременными сбоями либо отказами элементов, обеспечивающих аппаратную реализацию способа, на работу СУРТ, в рассматриваемом способе осуществляют следующим образом.
Производят запоминание не менее двух текущих значений сигнала Kp(tn).
В каждом n-ном периоде времени фиксируют наличие или отсутствие признака достоверности.
При фиксации отсутствия признака достоверности текущему значению Kp(tn) присваивают его предыдущее значение. Например, при фиксации отсутствия признака достоверности в n-ном и (n+1)-м периодах в n-ном периоде присваивают значение Kp(tn-1), являющееся достоверным, в (n+1)-м периоде - Kp(tn), которое в рассматриваемом случае равно Kp(tn-1), в (n+2)-м периоде при фиксации наличия признака достоверности операцию присваивания не используют. Таким образом, в каждом периоде времени при отсутствии признака достоверности текущему значению сигнала Kp(tn) присваивают ближайшее его предыдущее достоверное значение, что позволяет исключить влияние кратковременных отказов, сбоев и импульсных помех на результаты измерения уровня и таким образом повысить точность и достоверность измерения.
5. Далее производят запоминание k текущих значений сигнала Kp(tn) и формирование в каждом n-ном периоде времени приращения ΔKp(tn) в соответствии с выражением

где n - номер текущего периода времени,
k - количество периодов времени ΔT0, через которое определяется приращение (см. фиг.2).
Значение сигнала ΔKp(tn) сравнивают в каждом n-ном периоде времени пороговыми значениями ΔКрп и минус ΔКрп.
Запоминают три текущих результата сравнения.
В каждом n-ном периоде времени проверяют наличие (отсутствие) признака ПKp(tn) достижения уровнем диэлектрического вещества емкостного датчика в соответствии с выражением

где ΔКрп - пороговое значение, константа.
Формирование ПKp(tn)=1 соответствует признаку достижения уровнем диэлектрического вещества нечетного емкостного датчика.
Формирование ПКр(tn)=-1 соответствует признаку достижения уровнем диэлектрического вещества четного емкостного датчика.
Формирование ПKp(tn)=0 соответствует отсутствию признака достижения уровнем диэлектрического вещества емкостного датчика.
В примере, приведенном на фиг.2 в момент времени tn=tn*, зафиксирован признак ПКр(tn)=1 достижения уровнем диэлектрического вещества нечетного емкостного датчика, соответствующий положительному приращению сигнала Kp(tn).
Количество периодов k, пороговое значение ΔКрп, количество запоминаемых и используемых текущих результатов сравнения (в рассматриваемом примере - три) и вид выражения (функции) для формирования признака ПКр(tn) выбирают из условия надежной фиксации соответствующего признака в условиях действия помех (дестабилизирующих факторов) с учетом конкретных моделей изменения сигнала и помехи при прохождении ДД. При этом возможность независимого задания указанных временных, амплитудных и аналитических характеристик процесса распознавания указанного признака позволяет более точно учитывать особенности конкретных моделей изменения сигнала и помехи и таким образом повысить достоверность (помехозащищенность) измерения уровня.
6. Запоминают m текущих значений сигнала Kp(tn), соответствующих моментам времени tn-m+1tn-m+2…tn-1tn.
В случае фиксации в периоде времени n=n* признака ПKp(tn) формируют m значений эталонного сигнала Si(tn), соответствующего модели изменения сигнала Kp(tn) при условии достижения уровнем диэлектрического вещества верхней границы емкостного датчика в момент времени tn*-i. Значения сигнала Si(tn) формируют в интервале времени от tn*-m+1 до tn*. Значение параметра i выбирают из условия
0≤i≤m-1.
Сигнал Kp(tn) в интервале времени от tn*-m+1 до момента t0 достижения уровнем диэлектрического вещества верхней границы ДД (НВ ДД на фиг.2) остается практически неизменным (см. сигнал Kp(tn) на фиг.2), а в интервале времени от t0 до tn* происходит изменение сигнала Кр(tn), обусловленное изменением емкости при прохождении уровня диэлектрического вещества в зоне ДД. Соответственно эталонный сигнал в рассматриваемом варианте реализации формируют в виде кусочно-непрерывной функции в соответствии с выражением

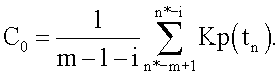
где С0 - постоянное значение, соответствующее модели изменения сигнала Kp(tn) до момента t0;
S1i(tn) - полином, соответствующий модели изменения сигнала Kp(tn) после момента t0 при условии tn*-i=t0.
Учитывая, что конкретная реализация сигнала Kp(tn) из-за влияния дестабилизирующих факторов может отличаться от модельной, в рассматриваемом варианте предусмотрено уточнение отдельных параметров модели сигнала Si(tn) в соответствии с параметрами конкретной реализации сигнала Kp(tn). В частности, значение С0, соответствующее на физическом уровне степени разбаланса собственно мостовой схемы при прохождении уровнем диэлектрического вещества участка между соседними ДД, определяют для каждой реализации Si(tn) как среднее арифметическое значений сигнала Kp(tn) в интервале времени от tn*-m+1 до tn*-i в соответствии с выражением
Производят сравнение указанных сигналов Kp(tn) и Si(tn) в интервале времени от tn*-m+1 до tn*. Для этого в рассматриваемом варианте реализации формируют сумму квадратов разности CKPi m текущих значений сигналов Kp(tn) и Si(tn) (при выбранном значении параметра i) в соответствии с выражением

Формируют другие реализации эталонного сигнала Si(tn) при других значениях i и определяют для каждой из них значение CKPi в соответствии с выражением (8).
Определяют значение i* параметра i, обеспечивающее наиболее точное соответствие между указанными сигналами по критерию минимизации CKPi.
Определяют в качестве искомого момента времени t0 момент tn*-i*.
В примере, приведенном на фиг.3, значения параметров соответствуют m=20, ΔT0=0,06 с, tn*=66,54 с. При этом в результате сравнения сигналов Kp(tn) и Si(tn) с использованием в качестве S1 полинома третьей степени определяем i=i*=5 (именно этому случаю соответствует сигнал Si(tn) на фиг.3) и соответственно tn*-i*=t0=66,24 с. Из фиг.3 видно, что выполнение дополнительных операций, связанных с формированием ряда реализации эталонного сигнала Si(tn) в соответствии с моделью сигнала Kp(tn) и определением реализации, обеспечивающей наиболее точное соответствие между указанными сигналами на протяжении m периодов времени, позволило в рассматриваемом варианте способа зафиксировать момент t0 в условиях действия помех.
Описанная последовательность дополнительных операций позволяет:
а) обеспечить возможность разделения операций фиксации признака ПКр(tn) и операций определении t0 (при условии, что признак ПKp(tn) зафиксирован) и соответственно независимого задания параметров указанных групп операций;
б) использовать для определения t0 операции сравнения сигнала Kp(tn) с реализациями эталонных сигналов Si(tn) на протяжении m периодов времени (вместо сравнения мгновенного значения сигнала с порогом) с определением t0 по реализации, обеспечивающей наиболее точное соответствие между указанными сигналами;
в) исключить необходимость дополнительной фильтрации,
что в свою очередь позволяет устранить техническое противоречие между точностью и помехозащищенностью (исключением возможности ложной фиксации либо пропуска КТ) при определении t0 и повысить точность определения t0 и соответственно точность измерения уровня диэлектрического вещества в условиях помех.
Определение моментов времени t0 для других ДД производят аналогично.
Об уровне диэлектрического вещества судят по моментам времени t0 прохождения верхних границ соответствующих ДД.
По сравнению с прототипом предлагаемый способ позволяет повысить точность определения моментов прохождения уровнями жидкости заданных значений, расширить функциональные возможности и сферу применения и упростить аппаратную реализацию способа. Уменьшение гарантийных запасов топлива за счет повышения точности и надежности (достоверности) определения моментов прохождения уровнями жидкости заданных значений и улучшение объемно-массовых характеристик устройства, реализующего предлагаемый способ, за счет его упрощения, позволяют улучшить отношение массы полезной нагрузки к стартовой массе изделия.
В настоящее время заявленный способ использован при разработке конструкторской документации одного из изделий РКТ. Проведены математическое моделирование и экспериментальная отработка основных технических решений.
Источники информации
1. Патент РФ №2025666, кл. G01F 23/26. Многоточечный сигнализатор уровня (его варианты).
2. Балакин С.В. Дывак А.Н. Филин В.М. Фазовый способ измерения уровня топлива жидкостных ракет. Ракетно-космическая корпорация «Энергия» им. С.П.Королева. Труды. Серия XII. Выпуск 2. Расчет, проектирование, конструирование и испытания космических систем. Королев, 2008, с.58…68.
3. Андриенко А.Я., Балакин С.В., Ломтев С.М., Портнов-Соколов Ю.П. Проблема измерения уровня топлива на борту жидкостных ракет. Ракетно-космическая корпорация «Энергия» им. С.П.Королева. Труды. Серия XII. Выпуск 2. Расчет, проектирование, конструирование и испытания космических систем. Королев, 2008, с.5…28.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ДИЭЛЕКТРИЧЕСКОГО ВЕЩЕСТВА | 2009 |
|
RU2397454C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ДИЭЛЕКТРИЧЕСКОГО ВЕЩЕСТВА | 2010 |
|
RU2445584C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ДИЭЛЕКТРИЧЕСКОГО ВЕЩЕСТВА | 2003 |
|
RU2262669C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ | 2015 |
|
RU2608842C1 |
| ДАТЧИК И СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2003 |
|
RU2267757C2 |
| БОРТОВАЯ ТОПЛИВОМЕРНАЯ СИСТЕМА С КОМПЕНСАЦИЕЙ ПО ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2013 |
|
RU2532965C2 |
| БОРТОВАЯ СИСТЕМА КОНТРОЛЯ ТОПЛИВА С КОМПЕНСАЦИЕЙ ПО ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2013 |
|
RU2532968C2 |
| БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ И ИЗМЕРЕНИЯ ТОПЛИВА С КОМПЕНСАЦИЕЙ ПО ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2013 |
|
RU2532964C2 |
| БОРТОВАЯ СИСТЕМА КОНТРОЛЯ И ИЗМЕРЕНИЯ ТОПЛИВА С КОМПЕНСАЦИЕЙ ПО ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2013 |
|
RU2532963C2 |
| БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ ТОПЛИВОМ С КОМПЕНСАЦИЕЙ ПО ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2013 |
|
RU2532967C2 |
Изобретение относится к области электроизмерительной техники, более конкретно - к мостовым методам измерения на переменном токе параметров датчиков, и может быть использовано для измерения уровня диэлектрического вещества, в частности в системах управления расходованием топлива изделий ракетно-космической техники. Сущность: способ выполнен на основе мостовой схемы, смежные плечи которой образованы двумя группами емкостных датчиков уровня. Формируют сигнал постоянной частоты для питания мостовой схемы. Формируют на выходе мостовой схемы сигнал разбаланса. Сигнал разбаланса суммируют с сигналом постоянной частоты с заранее выбранными весовыми коэффициентами и дополнительно суммируют с сигналом постоянной частоты со вторыми заранее выбранными весовыми коэффициентами, отличающимися от первых. Производят детектирование и фильтрацию первого и второго просуммированных сигналов. Текущее значение полярности каждого из сигналов, формируемых в процессе детектирования, определяют в зависимости от совпадения фаз соответствующего просуммированного сигнала и сигнала постоянной частоты. Первый и второй отфильтрованные сигналы фиксируют и используют для измерения уровня диэлектрического вещества. Технический результат: повышение точности измерения, упрощение, расширение функциональных возможностей за счет формирования признака достоверности выходного сигнала. 5 з.п. ф-лы, 3 ил.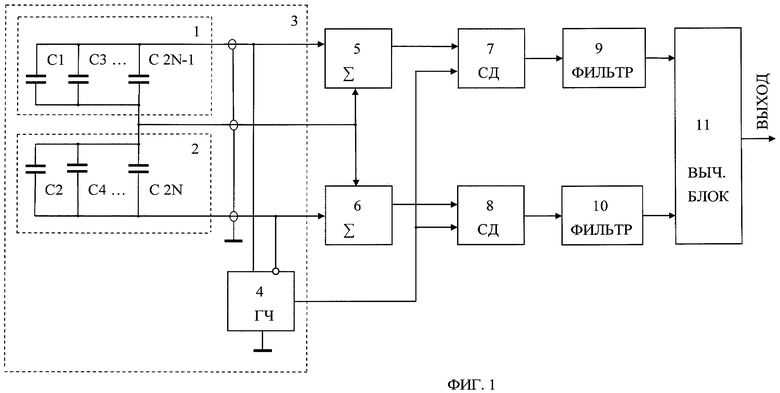
1. Способ измерения уровня диэлектрического вещества на основе мостовой схемы, смежные плечи которой образованы двумя группами емкостных датчиков уровня, с использованием операций формирования сигнала постоянной частоты для питания мостовой схемы, формирования на выходе мостовой схемы сигнала разбаланса, детектирования и фильтрации указанного сигнала разбаланса, отличающийся тем, что сигнал разбаланса предварительно суммируют с сигналом постоянной частоты с заранее выбранными весовыми коэффициентами и дополнительно суммируют с сигналом постоянной частоты со вторыми заранее выбранными весовыми коэффициентами, отличающимися от первых, после чего производят детектирование и фильтрацию первого и второго просуммированных сигналов, причем текущее значение полярности каждого из сигналов, формируемых в процессе детектирования, определяют в зависимости от совпадения фаз соответствующего просуммированного сигнала и сигнала постоянной частоты, а полученные таким образом первый и второй отфильтрованные сигналы фиксируют и используют для измерения уровня диэлектрического вещества.
2. Способ по п.1, отличающийся тем, что дополнительно формируют и фиксируют третий сигнал, соответствующий разности первого и второго фиксированных сигналов с третьими заранее выбранными весовыми коэффициентами, который сравнивают с заранее выбранными допусками, а результат сравнения используют для определения признака достоверности текущей информации об уровне диэлектрического вещества.
3. Способ по п.2, отличающийся тем, что дополнительно периодически формируют, фиксируют и используют для измерения уровня диэлектрического вещества сигнал относительной разности плечевых сопротивлений мостовой схемы Kp(tn), соответствующий отношению суммы первого и второго фиксированных сигналов с четвертыми заранее выбранными весовыми коэффициентами к разности первого и второго фиксированных сигналов с пятыми заранее выбранными весовыми коэффициентами.
4. Способ по п.3, отличающийся тем, что при отсутствии признака достоверности текущей информации текущему значению сигнала Kp(tn) присваивают ближайшее его предыдущее достоверное значение.
5. Способ по п.4, отличающийся тем, что дополнительно производят запоминание k текущих значений сигнала Kp(tn) и в каждом n-м периоде времени формируют приращение ΔKp(tn) указанного сигнала в соответствии с выражением
 ,
,
где n - номер текущего периода времени, k - количество периодов времени, через которое определяется приращение, после чего значение сигнала ΔKp(tn) сравнивают с заранее выбранными пороговыми значениями, a q текущих результатов сравнения запоминают и используют для определения признака ПKp(tn) достижения уровнем диэлектрического вещества соответствующего емкостного датчика, при этом указанный признак используют для измерения уровня диэлектрического вещества.
6. Способ по п.5, отличающийся тем, что дополнительно производят запоминание m текущих значений сигнала Kp(tn), при этом в случае фиксации признака ПКp(tn) в момент фиксации tn* производят формирование и запоминание m значений эталонного сигнала Si(tn), соответствующего известной модели изменения сигнала Kp(tn) при условии достижения уровнем диэлектрического вещества верхней границы емкостного датчика в момент времени tn*-i, производят сравнение m запомненных значений сигналов Kp(tn) и Si(tn) при значениях 1, соответствующих условию
0≤i<m-1,
причем по результатам сравнения указанных сигналов определяют момент времени достижения уровнем диэлектрического вещества верхней границы соответствующего емкостного датчика, который в свою очередь используют для измерения уровня диэлектрического вещества, при этом сигнал Si(tn) формируют с использованием кусочно-непрерывной функции, задаваемой разными аналитическими выражениями в интервалах времени до и после момента tn*-i.
| МНОГОТОЧЕЧНЫЙ СИГНАЛИЗАТОР УРОВНЯ (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2025666C1 |
| Многоточечный сигнализатор уровня жидкости | 1985 |
|
SU1303834A1 |
| Многоточечный сигнализатор уровня | 1982 |
|
SU1114889A1 |
| Дискретный емкостной уровнемер | 1978 |
|
SU1002842A1 |
| US 3911744 A, 14.10.1975 | |||
| US 3443438 A, 13.05.1969. | |||

