Изобретение относится к автоматическому управлению и может быть использовано при создании электроприводов роботов.
Известен самонастраивающийся электропривод, содержащий измеритель рассогласования, усилитель, нелинейный элемент, сумматор, интегратор, делитель и регулятор, сигнальный выход которого соединен с входом объекта управления, с которым связаны датчик тока, датчик скорости и датчик положения, являющиеся выходами объекта управления, причем выход датчика положения подключен к первому входу измерителя рассогласования, второй вход которого соединен с входом системы, а выход измерителя рассогласования подключен к сигнальному входу регулятора, выход датчика тока подключен к первому входу сумматора, второй вход которого соединен с выходом усилителя, подключенного входом к выходу датчика скорости и к входу нелинейного элемента, выход которого соединен с третьим входом сумматора, подключенного выходом к входу интегратора, а также первый и второй выпрямители, релейный элемент, элемент выборки-хранения, сигнальный вход которого соединен с выходом делителя, первый вход которого соединен с выходом первого выпрямителя, подключенного входом к выходу интегратора, выход датчика скорости соединен с входом второго выпрямителя, подключенного выходом к второму входу блока деления, управляющий вход регулятора соединен с выходом элемента выборки-хранения, управляющий вход которого соединен с выходом релейного элемента, подключенного входом к выходу датчика скорости (см. А.с. СССР №1352454, БИ №42, 1987 г.).
Недостатком этого устройства является то, что оно обеспечивает только инвариантность электропривода к изменению его суммарного момента инерции. Однако при этом качество движения и устойчивость могут не удовлетворять требуемым показателям.
Известно также устройство для управления приводом робота, содержащее блок умножения, последовательно соединенные усилитель, электродвигатель, датчик тока, первый сумматор, второй выход электродвигателя соединен с исполнительным механизмом, датчиком положения и датчиком скорости, выходы датчика положения и датчика скорости соединены соответственно с вторыми входами второго сумматора и блока деления, второй вход первого сумматора соединен с выходом измерителя внешнего момента, а также третий сумматор, интегратор, апериодическое звено и инерционное дифференцирующее звено, причем выход второго сумматора соединен с входами апериодического звена и инерционного дифференцирующего звена, выход которого соединен с первым входом блока умножения, второй вход которого соединен с выходом блока деления, первый вход которого соединен с выходом интегратора, вход которого соединен с выходом первого сумматора, выход блока умножения соединен с первым входом третьего сумматора, второй вход которого соединен с выходом апериодического звена, а выход - с входом усилителя (см. А.с. СССР №1142810, БИ №8, 1985 г.).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению. Однако его недостатком также является то, что оно обеспечивает только инвариантность электропривода к изменению его суммарного момента инерции, но при этом качество движения и устойчивость могут не удовлетворять требуемым показателям.
Задачей, на решение которой направлено заявляемое техническое устройство, является повышение качества переходного процесса и устойчивости движения электропривода при изменении его суммарного приведенного момента инерции.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает получение дополнительных входных воздействий на этот электропривод, обеспечивающий стабильно высокие показатели качества переходных процессов и необходимые запасы устойчивости при изменениях суммарного приведенного момента инерции на его выходном валу.
Поставленная задача решается тем, что в самонастраивающемся электроприводе, содержащем последовательно соединенные первый сумматор, инерционное дифференцирующее звено, блок умножения, второй сумматор, второй вход которого через апериодическое звено подключен к выходу первого сумматора, усилитель, электродвигатель, редуктор, на выходном валу которого установлен датчик положения, выход которого подключен ко второму входу первого сумматора, первый вход которого соединен со входом электропривода, а также датчик скорости, установленный на выходном валу электродвигателя, последовательно соединенные датчик тока электродвигателя, третий сумматор и интегратор, а также блок деления, второй вход третьего сумматора через первый релейный элемент подключен к выходу датчика скорости, а также к входам первого выпрямителя и второго релейного элемента, первый вход блока деления через второй выпрямитель соединен с выходом интегратора, его второй вход подключен к выходу первого выпрямителя, а выход - к первому входу элемента выборки-хранения, второй вход которого соединен с выходом второго релейного элемента, а выход через функциональный преобразователь - со вторым входом блока умножения.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения обеспечивают требуемое качество переходных процессов и требуемый запас устойчивости движения электропривода при изменениях его суммарного момента инерции.
На фиг.1 представлена структурная схема устройства и введены следующие обозначения: αp - угол поворота выходного вала редуктора;αж - сигнал желаемого значения угла αр;  - угловая скорость вращения ротора электродвигателя; U*, U - усиливаемый сигнал и сигнал управления электродвигателем 7 соответственно; ε=αж-αр - ошибка электропривода.
- угловая скорость вращения ротора электродвигателя; U*, U - усиливаемый сигнал и сигнал управления электродвигателем 7 соответственно; ε=αж-αр - ошибка электропривода.
Самонастраивающийся электропривод содержит последовательно соединенные первый сумматор 1, инерционное дифференцирующее звено 2, блок 3 умножения, второй сумматор 4, второй вход которого через апериодическое звено 5 подключен к выходу первого сумматора 1, усилитель 6, электродвигатель 7, редуктор 8, на выходном валу которого установлен датчик 9 положения, выход которого подключен ко второму входу первого сумматора 1, первый вход которого соединен со входом электропривода, а также датчик 10 скорости, установленный на выходном валу электродвигателя 7, последовательно соединенные датчик 11 тока электродвигателя 7, третий сумматор 12 и интегратор 13, а также блок 14 деления, второй вход третьего сумматора 12 через первый релейный элемент 15 подключен к выходу датчика 10 скорости, а также к входам первого выпрямителя 16 и второго релейного элемента 17, первый вход блока 14 деления через второй выпрямитель 18 соединен с выходом интегратора 13, его второй вход подключен к выходу первого выпрямителя 16, а выход - к первому входу элемента 19 выборки-хранения, второй вход которого соединен с выходом второго релейного элемента 17, а выход через функциональный преобразователь 20 - со вторым входом блока 3 умножения. Объект управления 21.
Электропривод работает следующим образом. Сигнал ошибки 8 на выходе сумматора 1 после коррекции в блоках 2-5, усиливаясь, поступает на вход электродвигателя 7, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от поступающего сигнала U. Суммарный момент инерции ротора электропривода при работе с различными объектами управления имеет различную величину. Поэтому качественные показатели работы этого электропривода и его устойчивость при использовании традиционных корректирующих устройств с постоянными параметрами могут недопустимо ухудшаться. В результате возникает задача создания таких корректирующих устройств, которые могут изменять свои параметры, постоянно подстраиваясь под изменяющиеся значения суммарного момента инерции и тем самым обеспечивая сохранение устойчивости и высоких показателей качества работы рассматриваемого электропривода.
В работе Основы проектирования следящих систем /Под ред. Н.А.Лакоты. М.: Машиностроение, 1978. стр.171-173 показано, что при уменьшении суммарного момента инерции электропривода, который описывается передаточной функцией вида

(Rя, Lя - соответственно, активное и индуктивное сопротивления якорной обмотки электродвигателя; Ку - коэффициент усиления усилителя 6; Кэм - конструктивный коэффициент электродвигателя; J - суммарный приведенный момент инерции ротора электродвигателя и вращающихся частей редуктора с объектом управления) происходит снижение запасов устойчивости по амплитуде, и он вообще может стать неустойчивым, а при увеличении - происходит снижение запасов устойчивости по фазе. В последнем случае это приводит к значительному ухудшению качественных показателей работы электропривода. При этом он имеет медленно затухающие переходные процессы с большой величиной перерегулирования. Использование в указанной ситуации традиционных корректирующих устройств со стационарными параметрами, как это было показано в отмеченной выше монографии, во многих случаях не позволяет обеспечить работу электроприводов с заданными показателями качества. Однако, если параметры этих корректирующих устройств менять, то качественные показатели работы этого электропривода можно сохранить даже при значительных изменениях величины J.
В указанной выше монографии для целей коррекции электропривода (1) предлагалось использовать устройство, имеющее передаточную функцию вида

где T1>>T2=const, T1=1/ωcp=const, ωcp - частота среза амплитудно-частотной характеристики электропривода. Причем величина ωcp определяется при номинальных значениях параметров этого электропривода.
Следует отметить, что корректирующее устройство (2) на частоте ωcp=const позволяет уменьшить наклон логарифмической амплитудо-частотной характеристики электропривода с минус второго до минус первого. В результате его устойчивость и качественные показатели переходных процессов при ωcp=const являются хорошими. Однако при изменениях J коррекция с передаточной функцией (2) уже не может обеспечить электроприводу сохранение устойчивости и требуемых показателей качества работы при постоянстве параметров этого корректирующего устройства, поскольку величина ωcp изменяется, являясь функцией J. В результате возникает задача изменения величины T1 при изменении J, а следовательно, и ωср таким образом, чтобы всегда имело место равенство Т1=1/ωср=var при любом значении J.
Поскольку для типовых электродвигателей постоянного тока справедливо равенство  (
( - величина момента сухого трения, i - ток в якорной обмотке электродвигателя), то несложно показать, что
- величина момента сухого трения, i - ток в якорной обмотке электродвигателя), то несложно показать, что
Выходной сигнал релейного элемента 15 равен 
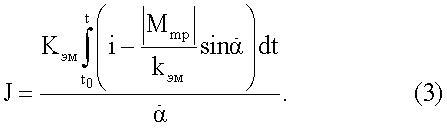
Следовательно, учитывая выражение (3), на выходе блока 14 деления можно сформировать сигнал J, но для этого необходимо исключить ситуацию, когда осуществляется деление на ноль при  . Более того, для обеспечения качественной работы этого блока деления, учитывая, что J всегда положителен, можно вообще исключить изменение знаков делимого и делителя в выражении (3). Для решения этой задачи используются элементы 16-19 (см. фиг.1).
. Более того, для обеспечения качественной работы этого блока деления, учитывая, что J всегда положителен, можно вообще исключить изменение знаков делимого и делителя в выражении (3). Для решения этой задачи используются элементы 16-19 (см. фиг.1).
Поскольку первый положительный и второй отрицательный входы сумматора 12 имеют единичные коэффициенты усиления, а интегратор 13 имеет коэффициент усиления Кэм, то на выходе выпрямителя 18 формируется сигнал  Выпрямитель 16 и релейный элемент 17 имеют следующие выходные характеристики:
Выпрямитель 16 и релейный элемент 17 имеют следующие выходные характеристики:




Если Uвых17=Δ2, то на выходе элемента 19 формируется сигнал
получаемый на выходе блока 14 деления. Если  - становится меньше значения Δ1 (Δ1 - некоторая малая величина), то Uвыхl7=0 и элемент 17 переводит элемент выборки-хранения 19 в режим запоминания. При этом на выходе элемента 19 запоминается и сохраняется то значение сигнала J, которое было определено на выходе блока 14 деления в момент обнуления выходного сигнала элемента 17, т.е. в момент начала действия условия
- становится меньше значения Δ1 (Δ1 - некоторая малая величина), то Uвыхl7=0 и элемент 17 переводит элемент выборки-хранения 19 в режим запоминания. При этом на выходе элемента 19 запоминается и сохраняется то значение сигнала J, которое было определено на выходе блока 14 деления в момент обнуления выходного сигнала элемента 17, т.е. в момент начала действия условия  Если в некоторый момент времени опять начинает выполняться условие
Если в некоторый момент времени опять начинает выполняться условие  то вновь срабатывает релейный элемент 17. При этом элемент 19 опять переводится в режим выборки и начинает воспроизводить на своем выходе текущее значение J.
то вновь срабатывает релейный элемент 17. При этом элемент 19 опять переводится в режим выборки и начинает воспроизводить на своем выходе текущее значение J.
Конечно, во время отключения входа элемента 19 от выхода блока 14, когда  может произойти изменение J на некоторую величину. Это может привести к снижению качества работы электропривода. Однако величина Δ1 является малой и рабочие скорости электропривода значительно ее превосходят. Причем уменьшение
может произойти изменение J на некоторую величину. Это может привести к снижению качества работы электропривода. Однако величина Δ1 является малой и рабочие скорости электропривода значительно ее превосходят. Причем уменьшение  до величины Δ1 возможно только перед остановкой или реверсом электропривода. В случае резкого изменения величины J в режиме остановки электропривода по истечении малого промежутка времени качественные показатели его работы полностью восстанавливаются.
до величины Δ1 возможно только перед остановкой или реверсом электропривода. В случае резкого изменения величины J в режиме остановки электропривода по истечении малого промежутка времени качественные показатели его работы полностью восстанавливаются.
Функциональный преобразователь 20 строится на основе частотной характеристики W(jω), получаемой из передаточной функции электропривода (1). Он реализует нелинейную зависимость Т1=1/ωср=f(J), получаемую при выполнении условия A(ω,J)=1, где А(ω,J) - амплитудо-частотная характеристика электропривода с передаточной функцией (1). Этот преобразователь может быть построен в виде кусочно-линейной аппроксимации полученной зависимости Т1=1/ωср=f(J).
Передаточная функция инерционного дифференцирующего звена 2 имеет вид W2(s)-=s/(T2s+1), а апериодического звена 5 - вид W5(s)=1/(T2s+1). В результате на выходе блока 3 будет сформирован сигнал (T1s/(T2s+1))ε, a передаточная функция W(s)=П(s)=U*(s)/ε(s) части прямой цепи электропривода между сумматором 1 и усилителем 6 будет определяться выражением (2), у которого величина T1 непрерывно изменяется при изменении J, настраиваясь на изменяющуюся величину ωср амплитудо-частотной характеристики электропривода. При этом устойчивость и высокие показатели качества работы рассматриваемого электропривода за счет его самонастройки к изменяющимся значениям J сохраняются при любой величине J.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522858C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2592036C1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2014 |
|
RU2568787C1 |
| Самонастраивающийся электропривод | 1986 |
|
SU1352454A1 |
Изобретение относится к автоматическому управлению и может быть использовано при создании электроприводов роботов. Технический результат - неизменное обеспечение устойчивости и высокого качества управления электроприводом при любом значении его суммарного момента инерции. В устройство введена последовательная коррекция, параметры которой изменяются при изменении момента инерции рассматриваемого электропривода таким образом, чтобы на частоте среза логарифмическая амплитудно-частотная характеристика этого привода всегда изменяла бы свой наклон с (-2) на (-1) при любом значении суммарного момента инерции, обеспечивая указанному электроприводу необходимые запасы устойчивости и высокое качество процессов управления. 1 ил.
Самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, инерционное дифференцирующее звено, блок умножения, второй сумматор, второй вход которого через апериодическое звено подключен к выходу первого сумматора, усилитель, электродвигатель, редуктор, на выходном валу которого установлен датчик положения, выход которого подключен ко второму входу первого сумматора, первый вход которого соединен со входом электропривода, а также датчик скорости, установленный на выходном валу электродвигателя, последовательно соединенные датчик тока электродвигателя, третий сумматор и интегратор, а также блок деления, отличающийся тем, что второй вход третьего сумматора через первый релейный элемент подключен к выходу датчика скорости, а также к входам первого выпрямителя и второго релейного элемента, первый вход блока деления через второй выпрямитель соединен с выходом интегратора, его второй вход подключен к выходу первого выпрямителя, а выход - к первому входу элемента выборки-хранения, второй вход которого соединен с выходом второго релейного элемента, а выход через функциональный преобразователь, реализующий кусочно-линейную аппроксимацию нелинейной функции, обратной частоте среза амплитудно-частотной характеристики электропривода и зависящей от изменяющегося суммарного приведенного момента инерции ротора электродвигателя и вращающихся частей редуктора с объектом управления - со вторым входом блока умножения.
| Устройство для управления приводом робота | 1983 |
|
SU1142810A1 |
| Самонастраивающийся электропривод | 1986 |
|
SU1352454A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1798179A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2002 |
|
RU2208241C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2005 |
|
RU2309444C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2004 |
|
RU2277258C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2000 |
|
RU2187426C2 |
| US 4587618 A, 06.05.1986 | |||
| US 5103404 A, 07.04.1992. | |||

