Изобретение относится к области автоматического управления электроприводами при возникновении дефектов в их датчиках положения.
Известен самонастраивающийся электропривод, содержащий последовательно соединенные измеритель рассогласования, регулятор, усилитель, электродвигатель с редуктором, выходной вал которого соединен с датчиком скорости и датчиком положения, выход которого подключен к первому входу измерителя рассогласования, второй вход которого соединен с входом электропривода, последовательно соединенные первый релейный элемент, первый сумматор, второй вход которого соединен с выходом датчика скорости и входом первого релейного элемента, а его третий вход с выходом датчика тока якорной обмотки электродвигателя, первый интегратор, первый выпрямитель, блок деления, второй вход которого через второй выпрямитель подключен к выходу датчика скорости, элемент выборки-хранения, второй вход которого через второй релейный элемент соединен с выходом датчика скорости, а его выход с вторым входом регулятора, последовательно соединенные второй и третий сумматоры, второй интегратор, четвертый сумматор, второй вход которого подключен к выходу датчика тока, первый блок умножения, третий интегратор и второй блок умножения, второй вход которого подключен к второму входу регулятора, а его выход к третьему входу этого регулятора, последовательно соединенные третий блок умножения, первый вход которого соединен с выходом второго сумматора, а его второй вход с вторым входом первого блока умножения и через функциональный преобразователь с выходом второго интегратора, пятый сумматор, второй вход которого подключен к выходу источника постоянного напряжения, и четвертый блок умножения, второй вход которого соединен с выходом четвертого сумматора, а его выход с вторым входом третьего сумматора, третий вход которого подключен к выходу пятого блока умножения, соединенного первым входом с выходом второго интегратора, а вторым входом с выходом третьего интегратора, причем первый и второй входы второго сумматора подключены соответственно к выходам датчика скорости и усилителя (см. патент РФ № 2060530, МПК G05В13/02, 1996 г.).
Недостатком данного устройства является то, что оно позволяет улучшить точность и качество процесса управления, когда значительно изменяются инерционность объекта управления и активное сопротивление якорной обмотки электродвигателя, но при этом не обеспечивается аккомодация к дефектам в датчике положения привода.
Известен также самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, инерционное дифференцирующее звено, блок умножения, второй сумматор, второй вход которого через апериодическое звено подключен к выходу первого сумматора, усилитель, электродвигатель, редуктор, на выходном валу которого установлен датчик положения, выход которого подключен ко второму входу первого сумматора, первый вход которого соединен со входом электропривода, а также датчик скорости, установленный на выходном валу электродвигателя, последовательно соединенные датчик тока электродвигателя, третий сумматор и интегратор, а также блок деления, второй вход третьего сумматора через первый релейный элемент подключен к выходу датчика скорости, а также к входам первого выпрямителя и второго релейного элемента, первый вход блока деления через второй выпрямитель соединен с выходом интегратора, его второй вход подключен к выходу первого выпрямителя, а выход - к первому входу элемента выборки-хранения, второй вход которого соединен с выходом второго релейного элемента, а выход через функциональный преобразователь, реализующий кусочно-линейную аппроксимацию нелинейной функции, обратной частоте среза амплитудно-частотной характеристики электропривода и зависящей от изменяющегося суммарного приведенного момента инерции ротора электродвигателя и вращающихся частей редуктора с объектом управления - со вторым входом блока умножения (см. патент РФ № 2397529, МПК G05В13/00, 2010 г.).
Указанное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению. Но его недостатком является то, что оно, обеспечивая высокое качество управления при любом значении его суммарного момента инерции, не позволяет сохранить высокую динамическую точность при появлении ошибок в работе датчика положения выходного вала редуктора.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение неизменно точной работы электропривода при возникновении дефектов в датчике положения.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в обеспечении нечувствительности работы электропривода к появляющимся дефектам в датчике положения за счет формирования дополнительного управляющего воздействия, подаваемого на его вход. Это сохраняет работоспособность электропривода в процессе его эксплуатации.
Поставленная задача решается тем, что в самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, электродвигатель, связанный с датчиком скорости непосредственно и через редуктор - с датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с входом устройства, дополнительно вводятся последовательно соединенные второй сумматор, первый вход которого соединен с выходом датчика скорости, первый интегратор, третий сумматор, второй вход которого подключен к выходу датчика положения, а выход - ко второму входу второго сумматора и входу второго интегратора, выход которого соединен с третьим входом первого сумматора.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения обеспечивают инвариантность электропривода к ошибкам в работе его датчика положения, что обеспечивает неизменное качество в процессе его эксплуатации.
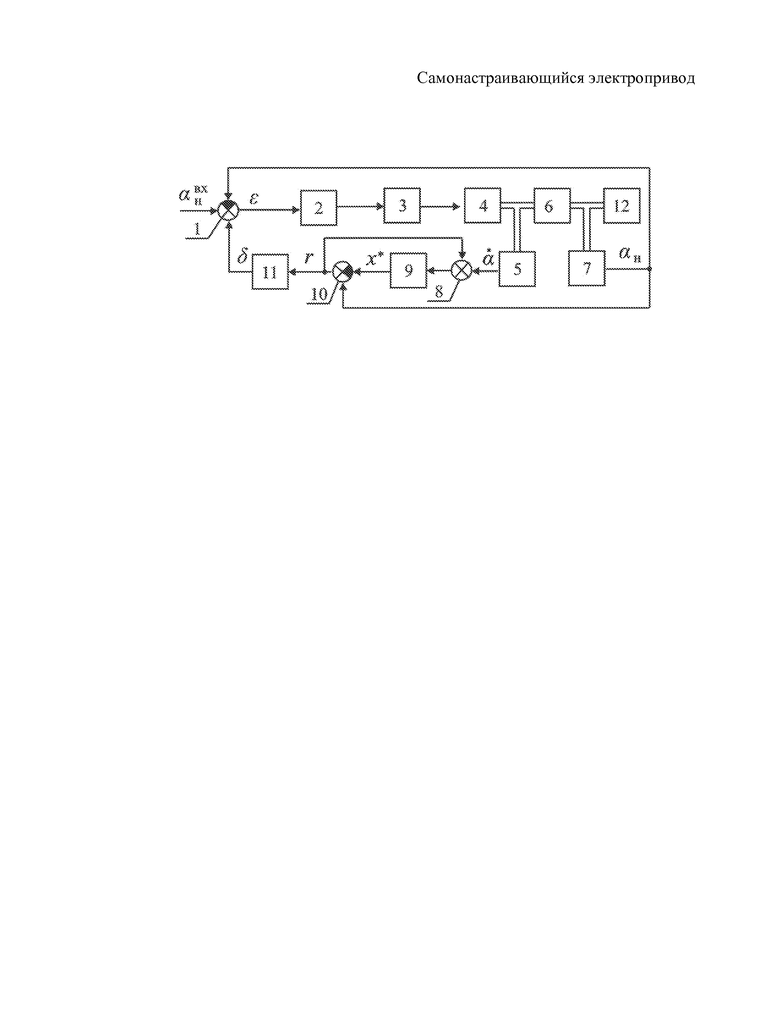
Изобретение поясняется чертежом, на котором представлена структурная схема самонастраивающегося электропривода и введены следующие обозначения: 



Самонастраивающийся электропривод содержит последовательно соединенные первый сумматор 1, корректирующее устройство 2, усилитель 3, электродвигатель 4, связанный с датчиком скорости 5 непосредственно и через редуктор 6 - с датчиком положения 7, выход которого подключен к первому входу первого сумматора 1, второй вход которого соединен с входом устройства, последовательно соединенные второй сумматор 8, первый вход которого соединен с выходом датчика скорости 5, первый интегратор 9, третий сумматор 10, второй вход которого подключен к выходу датчика положения 7, а выход - ко второму входу второго сумматора 8 и входу второго интегратора 11, выход которого соединен с третьим входом первого сумматора 1, объект управления 12.
Электропривод работает следующим образом. На его вход подается управляющее воздействие 

При возникновении дефекта в датчике положения 7 его выходной сигнал будет содержать ошибку 
Первый положительный вход второго сумматора 8 (со стороны датчика скорости 5) имеет коэффициент усиления 


а на выходе первого интегратора 9, имеющего единичный коэффициент усиления, - сигнал 
- выходной сигнал третьего сумматора 10, имеющего первый отрицательный (со стороны первого интегратора 9) и второй положительный входы с единичными коэффициентами усиления.
Взяв производные от левой и правой частей выражения (2), с учетом выражения (1), а также того, что при отсутствии дефектов в датчике положения 7 имеет место выражение 

где 

Решение уравнения (3) имеет вид: 


| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2014 |
|
RU2568787C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2014 |
|
RU2568789C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522858C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522857C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2450300C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2542904C2 |
Изобретение относится к самонастраивающейся системе управления электроприводом. Самонастраивающийся электропривод содержит последовательно соединенные первый сумматор, корректирующее устройство, усилитель, электродвигатель, связанный непосредственно с датчиком скорости и через редуктор - с датчиком положения. Выход датчика положения подключен к первому входу первого сумматора. Второй вход сумматора соединен с входом устройства. Второй сумматор, первый интегратор, третий сумматор и второй интегратор последовательно соединены. При этом первый вход второго сумматора соединен с выходом датчика скорости. Второй вход третьего сумматора подключен к выходу датчика положения, а выход - ко второму входу второго сумматора и входу второго интегратора. Выход второго интегратора соединен с третьим входом первого сумматора. Технический результат заключатся в обеспечении работоспособности электропривода при дефектах датчика положения. 1 ил.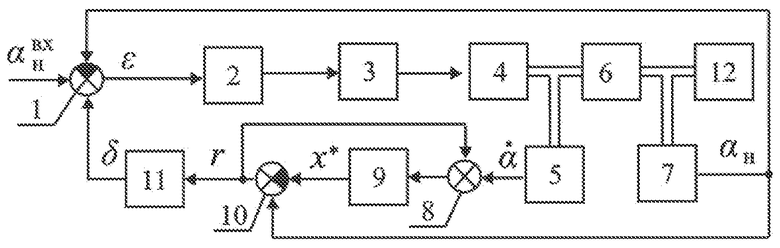
Самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, электродвигатель, связанный с датчиком скорости непосредственно и через редуктор - с датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с входом устройства, отличающийся тем, что в него дополнительно введены последовательно соединенные второй сумматор, первый вход которого соединен с выходом датчика скорости, первый интегратор, третий сумматор, второй вход которого подключен к выходу датчика положения, а выход - ко второму входу второго сумматора и входу второго интегратора, выход которого соединен с третьим входом первого сумматора.
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| Система управления электроприводом | 1987 |
|
SU1589255A1 |
| US 6515442 B1, 04.02.2003. | |||

