Область техники
Настоящее изобретение относится к управлению оттоком в микрохирургических системах, точнее к управлению оттоком в системах для микрохирургии глаза.
Уровень техники, к которому относится изобретение
При небольших разрезах в хирургии, в частности при хирургии глаза, в область операции вводятся небольшие зонды для разрезания, удаления или иных манипуляций с тканью. Во время этих хирургических процедур в глаз обычно попадает жидкость и эту жидкость и ткани удаляют из области хирургического вмешательства. У этих зондов есть небольшие отверстия, которые легко засоряются тканью. Это засорение обычно называют «закупориванием», «закупориванием наконечника» или «закупориванием отверстия». Процесс прочищения таких закупориваний обычно называют «оттоком».
Традиционный метод оттока заключается в создании импульсов давления в жидкости, которая течет через контур удаления к наконечнику или отверстию зонда для удаления застрявшей ткани. Поскольку отдельный импульс жидкости обычно не прочищает закупоривание, хирург обычно должен использовать последовательность импульсов до тех пор, пока он не увидит в операционный микроскоп, что наконечник или отверстие зонда прочищены. Несмотря на существование этого метода прочищения закупориваний, продолжает существовать необходимость в улучшенных методах управления оттоком в микрохирургических системах.
Сущность изобретения
Настоящее изобретение является методом управления оттоком в микрохирургических системах. Насос предназначен для обеспечения промывающей жидкости с постоянной скоростью к закупоренному отверстию хирургического прибора. Давление оттока измеряется в течение времени поблизости от отверстия. Осуществляется мониторинг давления оттока как функции от времени для определения момента разрушения закупоривания.
Краткое описание чертежей
Для более полного понимания настоящего изобретения, его сущности и преимуществ приводится следующее описание, снабженное сопроводительными чертежами, на которых изображено:
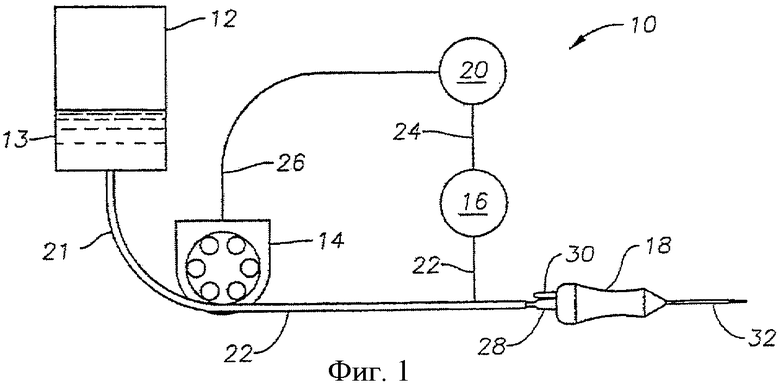
Фиг.1 - схематическая диаграмма, иллюстрирующая отдельные узлы контура ввода жидкости микрохирургической системы;
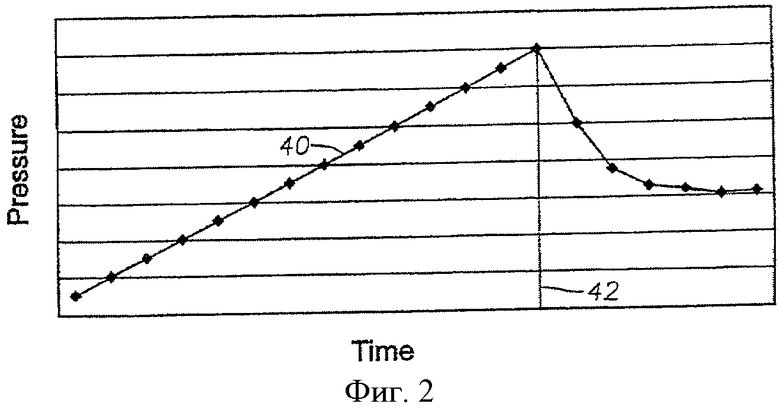
Фиг.2 схематически изображает давление оттока при постоянной скорости потока в контуре ввода жидкости на фиг.1.
Подробное описание предпочтительного варианта осуществления
Предпочтительный вариант осуществления настоящего изобретения и его преимущества можно лучше всего понять при обращении к фиг.1 и 2. Как показано на фиг.1, микрохирургическая система 10 включает резервуар вводимой жидкости 12, насос 14, измеритель давления 16, хирургический прибор 18 и компьютер или микропроцессор 20. Резервуар 12 содержит хирургическую промывающую жидкость 13, такую как BSS PLUS ® - внутриглазную промывающую жидкость, которую можно приобрести в фирме Alcon Laboratories, Inc. Линия 21 подачи жидкости гидравлически соединяет резервуар 12 и насос 14, а линия 22 подачи жидкости соединяет насос 14, измеритель давления 16 и хирургический прибор 18. Устройство 24 сопряжения электрически соединяет измеритель давления 16 и микропроцессор 20, устройство 26 сопряжения электрически соединяет микропроцессор 20 и насос 14.
Насосом 14 может быть любое подходящее устройство, создающее давление или вакуум, но предпочтительно использовать перистальтический, спиральный или лопастной насос. Измерителем 24 давления может быть любое подходящее устройство для прямого или опосредованного измерения давления или вакуума. Хирургическим прибором 18 может быть любой микрохирургический инструмент, зонд или часть инструмента, которую держат в руках, но предпочтительно использовать ультразвуковой зонд, факоэмульсификационный зонд, наконечник для гидроразрыва, аспирационный зонд или зонд для витрэктомии. Как показано на фиг.1, хирургическим устройством 18 является зонд для витрэктомии. У хирургического устройства 18 есть отверстие для ввода жидкости 28 для соединения с линией 22 подачи жидкости, аспирационное отверстие 30 для соединения с контуром аспирации (не показан) микрохирургической системы 10 и наконечник или отверстие 32. Микропроцессор 20 отвечает за осуществление управления с обратной связью и преимущественно для пропорционально-интегрально-дифференциального (ПИД) регулирования.
Во время операции удаляемые жидкости и ткани подаются к контуру аспирации микрохирургической системы 10 через аспирационное отверстие 30. Закупоривание отверстия 32 хирург может определить при помощи операционного микроскопа или автоматически посредством микропроцессора 20. После того, как закупоривание установлено, микропроцессор 20 посылает соответствующий сигнал к насосу 14 через устройство 26 сопряжения, чтобы он начал качать с постоянной скоростью для обеспечения промывающей жидкости 13 с постоянной скоростью к отверстию 32. Датчик давления 16 периодически измеряет давление оттока в линии 22 подачи жидкости (и таким образом и в отверстии 32) в режиме реального времени и обеспечивает соответствующий сигнал на микропроцессор 20 через устройство 24 сопряжения. Как показано на фиг.2, пока отверстие 32 остается закупоренным, у кривой или функции 40, показывающей зависимость давления оттока от времени, созданной датчиком давления 16 и микропроцессором 20, наклон будет положительным. В момент разрушения закупоривания 42 (когда отверстие 32 прочищается) наклон кривой 40 станет или нулевым или отрицательным. Микропроцессор 20 отображает кривую 40 для определения разрушения закупоривания 42. После появления разрушения закупоривания 42, микропроцессор 20 передает сигнал на насос 14 для прекращения подачи давления оттока.
Из вышесказанного можно понять, что настоящее изобретение представляет усовершенствованный метод управления оттоком в микрохирургических системах. По сравнению с обычным оттоком, для прочищения отверстия 32 необходим только один цикл оттока, и насосом 14 обеспечивается только определенное давление и объем промывающей жидкости 13, необходимое для прочищения отверстия 32. Таким образом закупоривание прочищается быстрее и отток более безопасен для пациента.
Настоящее изобретение проиллюстрировано здесь на примере, и человек с обычными навыками в этой области может внести различные изменения. К примеру, настоящее изобретение, описанное выше, относится к управлению оттоком в системах для микрохирургии глаза, но его также можно применять и в других микрохирургических системах.
Мы полагаем, что работа и конструкция настоящего изобретения ясно видна из предшествующего описания. В то время как прибор и способы, показанные или описанные выше, охарактеризованы как предпочтительные, могут быть внесены различные изменения и модификации, не изменяющие сильно сущность и объем изобретения, определенного нижеследующей формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАПРАВКА МИКРОХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2006 |
|
RU2459635C1 |
| ЗАПРАВКА МИКРОХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2006 |
|
RU2413541C2 |
| РЕГУЛИРОВАНИЕ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2006 |
|
RU2555125C2 |
| РЕГУЛИРОВАНИЕ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2006 |
|
RU2411022C2 |
| ХИРУРГИЧЕСКАЯ КАССЕТА ДЛЯ РЕГУЛИРОВАНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2006 |
|
RU2421196C2 |
| ХИРУРГИЧЕСКАЯ КАССЕТА С МНОГОЗОННОЙ ЖИДКОСТНОЙ КАМЕРОЙ | 2007 |
|
RU2434611C2 |
| МИКРОХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2432929C2 |
| СИСТЕМЫ И СПОСОБЫ АСПИРАЦИИ С ТРУБКАМИ МАЛОГО ДИАМЕТРА | 2011 |
|
RU2586738C2 |
| ЗОНД ДЛЯ ВИТРЭКТОМИИ | 2006 |
|
RU2416383C2 |
| УСТРОЙСТВА И СПОСОБЫ ЛИПОСАКЦИИ И ОКРУЖАЮЩИЕ ЭЛЕМЕНТЫ АСПИРАЦИОННОЙ СИСТЕМЫ И СПОСОБЫ | 2002 |
|
RU2300393C2 |
Изобретение относится к области медицины, а более конкретно к офтальмохирургии. Способ управления оттоком в микрохирургических системах включает следующий этапы: работа насоса для подачи промывающей жидкости с постоянной скоростью к закупоренному отверстию хирургического устройства; измерение давления оттока в течение времени в линии подачи жидкости, гидравлически соединенной с упомянутым отверстием, с использованием компьютера; мониторинг упомянутого давления как функции от времени для определения разрушения закупоривания, и прекращение указанного этапа работы, если указанный компьютер обнаруживает изменение знака наклона функции давления оттока от времени. 3 з.п. ф-лы, 2 ил.
1. Способ управления оттоком в микрохирургических системах, включающий следующие этапы:
работа насоса для подачи промывающей жидкости с постоянной скоростью к закупоренному отверстию хирургического устройства;
измерение давления оттока в течение времени в линии подачи жидкости, гидравлически соединенной с упомянутым отверстием, с использованием компьютера;
мониторинг упомянутого давления как функции от времени для определения разрушения закупоривания и
прекращение указанного этапа работы, если указанный компьютер обнаруживает изменение знака наклона функции давления оттока от времени.
2. Способ по п.1, в котором упомянутый наклон изменяет знак с положительного на отрицательный.
3. Способ по п.1, в котором упомянутый наклон изменяет знак с положительного на нулевой.
4. Способ по п.1, в котором упомянутый этап работы начинается при определении закупоривания упомянутого отверстия.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| US 5647853, A, 15.07.1997 | |||
| US 4865584, A, 12.09.1989 | |||
| СПОСОБ ФОРМИРОВАНИЯ СЛЕЗНОЙ ТОЧКИ | 2002 |
|
RU2236195C2 |

