Область техники, к которой относится изобретение
Настоящее изобретение относится к микрохирургическим системам и, в частности к регулированию внутриглазного давления в офтальмологической хирургии.
Предшествующий уровень
Во время хирургической операции с небольшим разрезом и, в частности во время офтальмологической хирургической операции, в операционное поле вводят небольшие зонды для разрезания, удаления или иной обработки ткани. Во время таких хирургических операций обычно осуществляют инфузию жидкости в глаз, и аспирацию инфузионной жидкости и ткани из операционного поля.
В настоящее время поддерживание оптимального внутриглазного давления во время офтальмологической операции является сложной задачей. Когда аспирацию не производят, давление в глазу становится равным давлению жидкости, подаваемой в глаз. Упомянутое давление обычно именуют «слепое давление». Однако, когда применяют аспирацию, внутриглазное давление резко снижается от слепого давления из-за потерь давления в аспирационном контуре, связанных с аспирационным потоком. Поэтому хирурги-офтальмологи в настоящее время допускают более высокое давление, чем требуемые давления, для компенсации в тех случаях, когда иначе аспирация снизила бы внутриглазное давление до состояний мягкого глаза. В клиническом отношении подобное превышение допустимого давления глаза не идеально.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание усовершенствованного способа регулирования внутриглазного давления в ходе офтальмологической операции.
Техническим результатом заявленного изобретения является повышение безопасности при проведении офтальмологических операций, исключение повреждения глаза, снижение травматичности во время операции.
В соответствии с одним аспектом настоящего изобретения предложен способ регулирования внутриглазного давления с использованием микрохирургической системы. Обеспечивают инфузионную камеру, содержащую жидкость для ирригации и выбирают требуемое внутриглазное давление. Повышают давление в инфузионной камере сжатым газом для подачи жидкости для ирригации в хирургическое устройство. Измеряют расход жидкости в линии для жидкости, гидравлически связанной с хирургическим устройством. Сигнал, соответствующий измеренному расходу, подают в компьютер. Вычисляют расчетное внутриглазное давление в компьютере в соответствии с измеренным сигналом. Регулируют уровень давления сжатого газа в ответ на второй сигнал из компьютера для поддержания расчетного внутриглазного давления приблизительно равным требуемому внутриглазному давлению.
В соответствии с другим аспектом настоящего изобретения предложена инфузионная камера. Инфузионная камера содержит первую камеру для размещения жидкости для ирригации и вторую камеру для размещения жидкости для ирригации. Первая камера не связана гидравлически со второй камерой. Подают жидкость для ирригации из инфузионного источника в первую камеру и вторую камеру. Подают жидкость для ирригации в хирургическое устройство из первой камеры во время микрохирургической операции, и данный этап заканчивают, когда уровень жидкости для ирригации в первой камере достигает нижнего предела. После окончания этого этапа подают жидкость для ирригации в хирургическое устройство из второй камеры, а первую камеру повторно заполняют жидкостью для ирригации из инфузионного источника.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения и дополнительных целей и преимуществ настоящего изобретения ниже приведено описание со ссылками на прилагаемые чертежи, на которых:
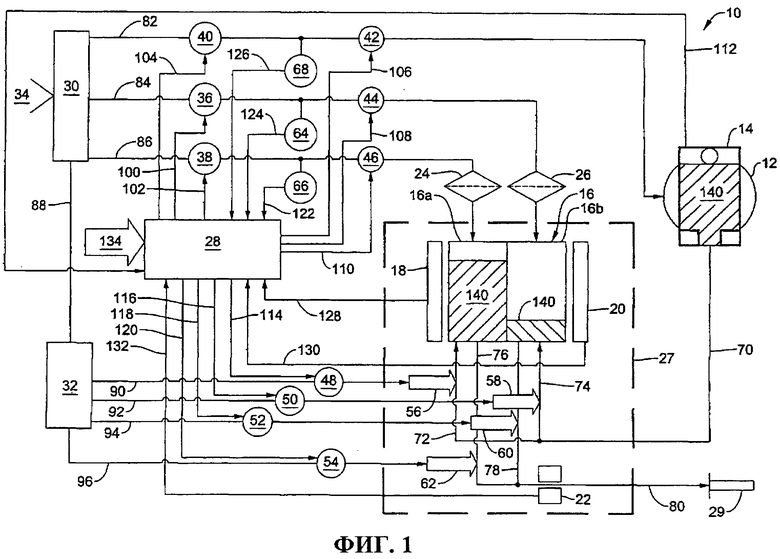
фиг. 1 изображает принципиальную схему, поясняющую управление инфузией в офтальмологической микрохирургической системе, согласно изобретению;
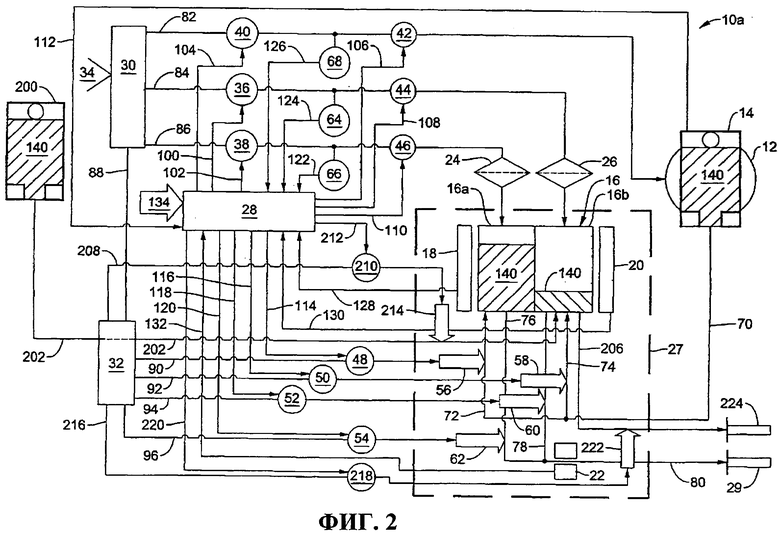
фиг. 2 - принципиальную схему, поясняющую управление инфузией и управление орошением в офтальмологической микрохирургической системе, согласно изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Офтальмологическая микрохирургическая система 10 (фиг. 1) содержит манжетку 12 давления, инфузионный источник 14, двойную инфузионную камеру 16, содержащую камеру 16а и камеру 16b, датчики 18 и 20 уровня жидкости, датчик 22 расходомера, фильтры 24 и 26, хирургическое устройство 29; компьютер или микропроцессор 28, газовые коллекторы 30 и 32, источник 34 сжатого газа, электромагнитные пропорциональные клапаны 36, 38 и 40, электромагнитные двухпозиционные клапаны 42, 44, 46, 48, 50, 52, 54, исполнительные элементы 56, 58, 60 и 62, и датчики 64, 66 и 68 давления. Двойная инфузионная камера 16, датчики 18 и 20 уровня жидкости, участки линий 70, 72, 74, 76, 78 и 80 для инфузионной жидкости и участки газовых линий 84 и 86 предпочтительно расположены в хирургической кассете 27. Инфузионный источник 14, двойная инфузионная камера 16, датчик 22 расходомера, фильтры 24 и 26; и хирургическое устройство 29 гидравлически связаны линиями 70-80 для инфузионной жидкости. Инфузионный источник 14, двойная инфузионная камера 16, газовые коллекторы 30 и 32, источник 34 сжатого газа, и исполнительные элементы 56, 58, 60 и 62 гидравлически связаны газовыми линиями 82, 84, 86, 88, 90, 92, 94 и 96. Инфузионный источник 14; датчики 18 и 20 уровня жидкости, датчик 22 расходомера; микропроцессор 28, электромагнитные пропорциональные клапаны 36-40; электромагнитные двухпозиционные клапаны 42-54; исполнительные элементы 56-62, и датчики 64 68 давления электрически связаны интерфейсами 100, 102, 104, 106, 108, 110, 112, 114, 116, 118, 120, 122, 124, 126, 128, 130 и 132.
Инфузионный источник 14 является предпочтительно гибким инфузионным источником. Датчики 18 и 20 уровня жидкости могут быть любым подходящим устройством для измерения уровня жидкости, соответственно, в инфузионных камерах 16а и 16b. Датчики 18 и 20 уровня жидкости могут предпочтительно непрерывно измерять уровень жидкости в инфузионных камерах 16а и 16b. Датчик 22 расходомера может быть любым подходящим устройством для измерения расхода жидкости в линии 80 для жидкости. Датчик 22 расходомера является предпочтительно неинвазивным датчиком расходомера. Фильтры 24 и 26 являются гидрофобными микробактериальными фильтрами. Предпочтительным фильтром является мембранный фильтр Versapor® (0,8-микрометровый), выпускаемый компанией Pall Corporation, East Hills, New York. Микропроцессор 28 способен осуществлять управление с обратной связью и, предпочтительно, PID (пропорционально-интегрально-дифференциальное) управление. Хирургическое устройство 29 может быть любым подходящим устройством для подачи хирургической жидкости для ирригации в глаз, но предпочтительно является инфузионной канюлей, наконечником для ирригации или ирригационно/аспирационным наконечником.
В процессе работы линии 70, 72 и 74 для жидкости, камеры 16а и 16b, линии 76, 78 и 80 для жидкости, и хирургическое устройство 29 первично заполняются хирургической жидкостью 140 для ирригации путем создания давления в инфузионном источнике 14. Хирургическая жидкость 140 для ирригации может быть любой хирургической жидкостью для ирригации, подходящей для офтальмологического применения, например, внутриглазным оросительным раствором BSS PLUS®, выпускаемым компанией Alcon Laboratories, Inc.
Повышение давления в инфузионном источнике 14 предпочтительно выполняется манжеткой 12 давления. В частности, микропроцессор 28 передает управляющий сигнал на открывание электромагнитного клапана 42 через интерфейс 106 и на закрывание электромагнитных клапанов 44 и 46 через, соответственно, интерфейсы 108 и 110. Микропроцессор 28 передает также управляющий сигнал на открывание электромагнитного пропорционального клапана 40 через интерфейс 104, так что в коллектор 30 подается соответствующее количество сжатого воздуха, чтобы привести в действие манжетку 12 давления. Датчик 68 давления воспринимает давление в газовой линии 82 и выдает соответствующий сигнал в микропроцессор 28 через интерфейс 126. Электромагнитные клапаны 48-54 сначала открыты так, что коллектор 32 подает сжатый воздух, чтобы привести в действие исполнительные элементы 56-62 для закрывания линий 72-78 для жидкости. Микропроцессор 28 передает управляющие сигналы на закрывание электромагнитных клапанов 48-54 через интерфейсы 114-120. Закрывание электромагнитных клапанов 48-54 приводит в действие исполнительные элементы 56-62 для открывания линий 72-78 для жидкости. После того, как все камеры и линии для жидкости первично заполнены, микропроцессор 28 закрывает исполнительные элементы 56-62 и, следовательно, линии 72-78 для жидкости. В альтернативном варианте, повышение давления в инфузионном источнике 14 может выполняться только под действием силы тяжести.
После первичного заполнения, пользователь вводит величину требуемого внутриглазного давления в микропроцессор 28 посредством устройства 134 ввода. Устройство 134 ввода может быть любым подходящим устройством, но, предпочтительно, является дисплеем с сенсорным экраном или физической ручкой управления. В предпочтительном варианте, сначала активной инфузионной камерой является камера 16b. Микропроцессор 28 передает соответствующие управляющие сигналы на открывание электромагнитного клапана 44 и на открывание электромагнитного пропорционального клапана 36 (через интерфейс 100), чтобы обеспечить соответствующий уровень давления воздуха в камере 16b. Датчик 64 давления воспринимает давление в газовой линии 84 и подает соответствующий сигнал в микропроцессор 28 через интерфейс 124. Микропроцессор 28 также передает соответствующий управляющий сигнал на открывание исполнительного элемента 60 и, следовательно, линии 78 для жидкости. Камера 16b подает жидкость 140 под давлением в глаз по линиям 78 и 80 для жидкости и через хирургическое устройство 29. Датчик 22 расходомера измеряет расход жидкости 140 и подает соответствующий сигнал в микропроцессор 28 через интерфейс 132. Микропроцессор 28 вычисляет расчетное внутриглазное давление с использованием сигнала из датчика 22 расходомера и эмпирически найденной информации об импедансе микрохирургической системы 10. Затем микропроцессор 28 передает соответствующий управляющий сигнал цепи обратной связи в электромагнитный пропорциональный клапан 36 для выдерживания расчетного внутриглазного давления на уровне или приблизительно равным требуемому внутриглазному давлению в течение всех фаз операции.
Датчик 20 уровня жидкости непрерывно контролирует снижение уровня жидкости 140 в камере 16b во время операции и обеспечивает соответствующий сигнал в микропроцессор 28 через интерфейс 130. Микропроцессор 28 выполняет регулировку давления воздуха, подводимого в камеру 16b, с учетом разности высоты напора жидкости, когда уровень жидкости 140 снижается. Когда уровень жидкости 140 в камере 16b достигает нижнего предела, микропроцессор 28 закрывает электромагнитный клапан 44 и исполнительный элемент 60 и открывает электромагнитный клапан 46 и исполнительные элементы 58 и 62. После этого активной инфузионной камерой является камера 16а. Микропроцессор 28 передает соответствующий управляющий сигнал в электромагнитный пропорциональный клапан 38 через интерфейс 102 для подачи сигнала соответствующего уровня давления воздуха в камеру 16а. Датчик 66 давления воспринимает давление в газовой линии 86 и подает соответствующий сигнал в микропроцессор 28 через интерфейс 122. Из камеры 16а жидкость 140 подается под давлением в глаз по линиям 76 и 80 для жидкости и через хирургическое устройство 29. Датчик 22 расходомера измеряет расход жидкости 140 и подает соответствующий сигнал в микропроцессор 28 через интерфейс 132. Микропроцессор 28 вычисляет расчетное внутриглазное давление в описанном выше порядке и передает соответствующий сигнал обратной связи в электромагнитный пропорциональный клапан 38 для выдерживания расчетного внутриглазного давления на уровне или приблизительно равным требуемому внутриглазному давлению в течение всех фаз операции. Микропроцессор 28 закрывает исполнительный элемент 58 и линию 74 для жидкости после того, как камера 16b снова заполнена жидкостью 140.
Датчик 18 уровня жидкости непрерывно контролирует снижение уровня жидкости 140 в камере 16а во время операции и обеспечивает соответствующий сигнал в микропроцессор 28 через интерфейс 128. Микропроцессор 28 выполняет регулировку давления воздуха, подводимого в камеру 16а, с учетом разности высоты напора жидкости, когда уровень жидкости 140 снижается. Когда уровень жидкости 140 в камере 16а достигает нижнего предела, микропроцессор 28 выполняет переключение камеры 16b в активное состояние инфузии и камеры 16а в пассивное состояние и вновь заполняет камеру 16а жидкостью 140 по линии 72 для жидкости. Такое циклическое переключение между камерами 16b и 16а продолжается в течение всей операции.
Инфузионный источник 14 предпочтительно контролируется датчиком уровня жидкости (не показан), способным подавать сигнал в микропроцессор 28 через интерфейс 112, когда источник 14 почти достигает предела опорожнения. Каждая из камер 16а и 16b также предпочтительно имеет объем, который дает возможность заменять инфузионный источник 14 при приближении к опорожнению, без перерыва хирургической процедуры. В частности, каждая из камер 16а и 16b предпочтительно имеет объем около 30 куб. см. Подобный объем оставляет около двух минут почти порожнему инфузионному источнику 14 на замену в режиме максимального расхода (например, при виктрэктомии с удалением хрусталика). Кроме того, после того, как инфузионный источник 14 заменен, все воздушные пузырьки в линиях 70, 72 и 74 для жидкостей будут автоматически «вымываться», когда происходит повторное заполнение неактивной камеры 16а или 16b, без потребности в повторном первичном заполнении.
В случае отказа любой из камер 16а или 16b микропроцессор 28 предпочтительно может продолжать хирургическую операцию только с одной активной камерой. В случае отказа обеих камер 16а и 16b, микропроцессор 28 предпочтительно может продолжать хирургическую операцию с использованием только инфузионного источника 14.
На фиг. 2 представлена видоизмененная офтальмологическая микрохирургическая система 10а. Микрохирургическая система 10а аналогична микрохирургической системе 10, за исключением наличия в ней ирригационной системы в дополнение к инфузионной системе, описанной выше для системы 10. В частности, система 10а идентична системе 10, за исключением того, что система 10а содержит также ирригационный источник 200, линии 202 и 206 для жидкости, газовые линии 208 и 216, электромагнитные клапаны 210 и 218, исполнительные элементы 214 и 222, электрические интерфейсы 212 и 220, и хирургическое устройство 224. Давление в ирригационном источнике 200 создается исключительно под действием силы тяжести. Для специалиста в данной области техники очевидно, что микрохирургическая система 10а допускает подачу хирургической жидкости 14 0 для ирригации в хирургическое устройство 29 по (инфузионной) линии 80 для жидкости и, независимо, подачу хирургической жидкости 140 для ирригации в хирургическое устройство 224 по линии 206 для жидкости. Микропроцессор 28 может вычислять информацию о расходе жидкости 140 в линии 206 для жидкости благодаря непрерывному контролю изменения объема жидкости внутри камеры 16b, как указано, датчиком 20 жидкости.
Из вышеизложенного можно понять, что настоящее изобретение предлагает усовершенствованный способ регулирования внутриглазного давления микрохирургической системой. Настоящее изобретение поясняется на примере, и специалистом в данной области техники могут быть предложены различные модификации. Например, хотя выше настоящее изобретение описано применительно к регулированию внутриглазного давления в офтальмологической микрохирургической системе, изобретение применимо также к регулированию давления внутри оперируемой ткани во время микрохирургических операций других типов.
Ниже приведены данные, полученные в результате проведения экспериментов, принятых в данной области техники.
Приведенные данные свидетельствуют о влиянии способа на глаз человека. Подтверждается, что заявленный способ позволяет снизить травматичность при проведении офтальмологических операций, в частности, путем регулирования внутриглазного давления.
Известно, что при проведении офтальмологических операций, в частности, витреоретинальной хирургии, требуется сложное комбинированное вмешательство, которое проводится на заднем отрезке глаза, например на сетчатке и стекловидном теле.
Гипотония во время витреоретинальной хирургии связана с отделением сосудистой оболочки и супрахориоидальным кровоизлиянием. Регулирование внутриглазного давления во время операции (ВГД) может быть неточным, потому что приложенное давление вливаемой жидкости обычно не равно результирующему ВГД из-за падения давления в инфузионной линии, вариаций уровней аспирации, снижения расхода и т.д.
ВГД при витрэктомии является функцией скорости аспирации, скорости инфузии потока и утечки жидкости. Расход аспирации не всегда следует из аппаратурных настроек параметров, и этот расход нелегко предсказать из-за многочисленных сопутствующих факторов, которые включают рабочий цикл, давление вакуума, вязкость аспирационной жидкости, и размера разреза витрэктомии.
Более точный контроль ВГД желателен для хирургов. Функция управления для ВГД в предложенном устройстве Vision System может снизить риск гипотонии во время витрэктомии.
В известных системах во время офтальмологической операции, например, для разрушения и аспирации хрусталика через микроскопические разрезы шириной 1,5 мм, используется хирургическое устройство, совмещенное с каналом для ирригации, и наконечник, обеспечивающий функцию аспирации. Задание параметров операции регулируется центральным блоком управления, включающим систему регулирования параметров вакуума (набор вакуума в зависимости от окклюзии), регулирования ирригации, а также компьютер, регулирующий и обеспечивающий сбалансированную работу всех вышеперечисленных систем устройства.
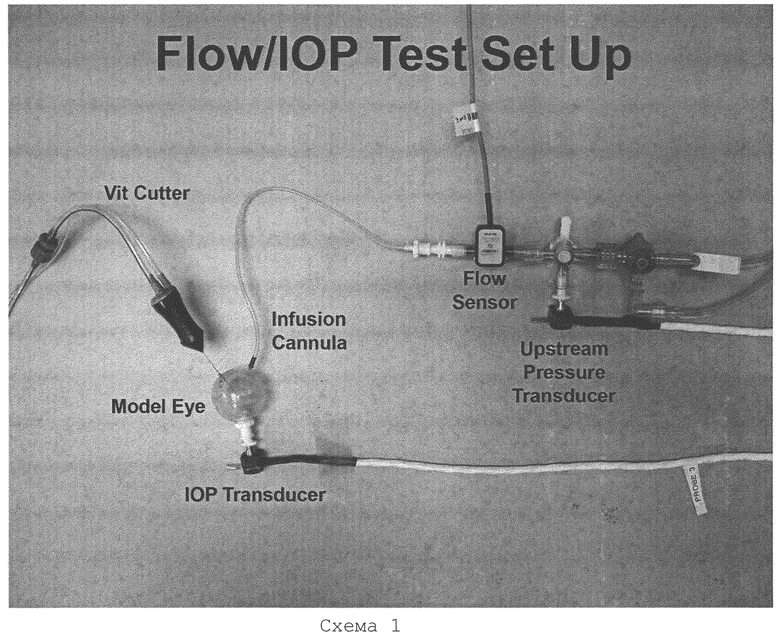
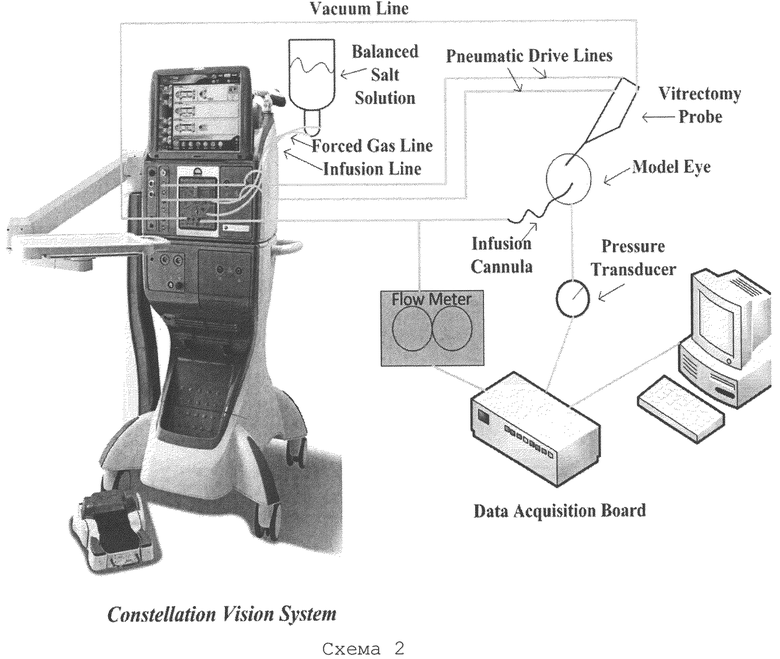
Изолированная система была собрана с помощью жесткой модели глаза (не человеческие глаза), выполненной из акриловых куполов и датчиков для измерения ВГД (см. схемы 1 и 2). Одна модель глаза была собрана для каждого датчика зонда тестирования. Сбалансированный солевой раствор (BSS, не стекловидного тела) вводили при давлении 30 мм рт.ст. для всех условий тестирования.
Проводилось тестирование, чтобы оптимизировать гидродинамические процессы в передней камере глаза в ходе операции; разделить ирригационный и аспирационный потоки сбалансированного солевого раствора в передней камере глаза и создать линейный безвихревой поток; сократить объем сбалансированного солевого раствора, проходящего через глаз в процессе операции.
В процессе тестирования были использованы 6 зондов, имеющих диаметр 20, 23, 25 и 25+™, хирургическая система, стандартные трубки для подачи ирригационного раствора, фиттинги луера и канюли для ирригации, как поставлялось производителем. Системы были установлены и были проведены операции согласно инструкциям производителя.
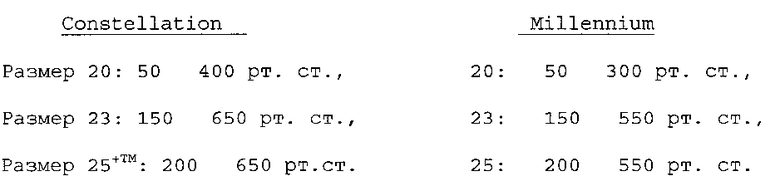
Экспериментальные условия включали: изменение величины вакуума и изменение скорости расхода. Системы Constellation Vision System и Bausch & Lomb Millennium Vitrectomy Enhancer тестировали в трех режимах с использованием и без использования компенсации ВГД.
Вследствие того, что ВГД и расходы являются кратковременными при первоначальном применении вакуума для аспирации, все тестовые данные были собраны после того как было достигнуто жидкостное равновесие.
При диаметре 25+™,23 и 20 зондов измеренное ВГД согласовывалось с заданными параметрами ВГД.
РЕЗУЛЬТАТЫ
Для Constellation с управлением ВГД
Для размера 25+™, 23 и 20, измеренная ВГД совпадала с заданной величиной ВГД.
Значения ВГД находились в пределах 10% от установленного значения давления в 90% случаев и более;
Значения ВГД находились в пределах 20% от установленного значения давления во всех случаях.
Для Constellation с заблокированным управлением ВГД Значения ВГД не согласовывались с установленными значениями. Отрицательные значения ВГД не возникали во время условий больших скоростей потока.
Для Bausch & Lomb Millennium Vitrectomy Enhancer
Значения ВГД не согласовывались с регулировочными значениями.
Значения ВГД были при установленном значении только при наименьшем расходе и наименьшем вакууме.
Отрицательные значения ВГД возникали при высоких расходах ВЫВОДЫ
Отрицательные значения ВГД могут привести к разрушению глаза во время офтальмологической операции. Осложнения, вызванные гипотонией (понижение давления), могут включать: отделение сосудистой оболочки глаза, супрахориоидальное (расположенный на наружной поверхности сосудистой оболочки глаза) кровотечение, потерю хирургической визуализации, ятрогенную катаракту, смещение внутриглазного хрусталика и др.
Использование признака регулирование ВГД, чтобы предотвратить интраоперационную (происходящую во время операции) гипотонию, может уменьшить частоту возникновения гипотонии и другие нежелательные явления.
Тестирование показало, в случаях для Bausch & Lomb Millennium Vitrectomy Enhancer, когда активный вакуум, сформированный быстрее оттока через зонд, чем вливание, может обеспечить приток, что приведет к отрицательному ВГД.
Система Constellation (с регулировкой ВГД) обеспечивает значения ВГД, которые согласуются с заданными ВГД по всему спектру сниженных значений, размеров датчиков, и вакуума при аспирации. ВГД никогда не был отрицательным.
Ограничения включают в себя: 1) лабораторные испытания с использованием модели глаза, 2) аспирацию только при низкой BSS вязкости, которая не отражает точно стекловидные жидкости или стекловидные смеси основного соляного раствора.
ЗАКЛЮЧЕНИЕ
Таким образом, функция компенсации ВГД обеспечивает превосходное регулирование ВГД по сравнению с системами без компенсации ВГД. Моделирование витрэктомии на модели глаза позволяет сделать заключение, что функция компенсации ВГД может повысить безопасность хирургии слоя прозрачных корнеагенных клеток глаза (стекловидного тела), путем уменьшения потенциала интраоперационной гипотонии и вторичных осложнений.
Предполагается, что порядок работы и конструкция настоящего изобретения очевидны из вышеприведенного описания. Хотя показанные и описанные выше устройства и способы характеризуются как предпочтительные, однако в них можно внести различные изменения и модификации, не выходящие за пределы существа и объема изобретения, определяемых нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРОВАНИЕ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2006 |
|
RU2411022C2 |
| ХИРУРГИЧЕСКАЯ КАССЕТА ДЛЯ РЕГУЛИРОВАНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2006 |
|
RU2421196C2 |
| ЗАПРАВКА МИКРОХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2006 |
|
RU2459635C1 |
| ЗАПРАВКА МИКРОХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2006 |
|
RU2413541C2 |
| Системы ирригации и аспирации офтальмологического аппарата для катарактальной и витреальной хирургии | 2019 |
|
RU2720821C1 |
| ЧУВСТВИТЕЛЬНЫЕ К ДАВЛЕНИЮ ХИРУРГИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ ДЛЯ ВИТРЭКТОМИИ | 2014 |
|
RU2651086C2 |
| ИРРИГАЦИОННАЯ СДАВЛИВАЮЩАЯ ЛЕНТА ПОД ДАВЛЕНИЕМ | 2010 |
|
RU2527354C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ИНФУЗИЕЙ ВО ВРЕМЯ ФАКОЭМУЛЬСИФИКАЦИИ | 2022 |
|
RU2788289C1 |
| ХИРУРГИЧЕСКАЯ КАССЕТА С МНОГОЗОННОЙ ЖИДКОСТНОЙ КАМЕРОЙ | 2007 |
|
RU2434611C2 |
| ПРИМЕНЕНИЕ ИРРИГАЦИОННОЙ ЖИДКОСТИ В ОФТАЛЬМОХИРУРГИИ | 2010 |
|
RU2432141C1 |
Изобретение относится к медицине, в частности к офтальмологической хирургии, и касается регулирования внутриглазного давления (ВГД) в процессе операции. Для этого используют микрохирургическую систему, содержащую хирургическую кассету, хирургическое устройство и компьютер. Кассета содержит инфузионную камеру, содержащую жидкость для ирригации. Создают и поддерживают давление в микрохирургической системе посредством устройства для поддержания давления, гидравлически связанного с указанной хирургической кассетой и содержащего источник сжатого газа. Устройство содержит также электромагнитный пропорциональный клапан и газовую линию, гидравлически соединяющую источник сжатого газа, пропорциональный клапан и хирургическую кассету. Гидравлически связывают хирургическое устройство с хирургической кассетой посредством линии для инфузионной жидкости. Выбирают требуемое ВГД. Поддерживают давление в указанной инфузионной камере посредством газа, подаваемого под давлением из указанного источника сжатого газа в хирургическую кассету. Подачу ирригационной жидкости осуществляют в хирургическое устройство по линии для инфузионной жидкости. Измеряют расход ирригационной жидкости в линии для жидкости, подают сигнал, соответствующий измеренному расходу ирригационной жидкости в компьютер. Вычисляют расчетное ВГД в компьютере в ответ на полученный сигнал. Используют компьютер для регулирования уровня давления сжатого газа путем подачи второго сигнала из компьютера на указанный пропорциональный клапан, чтобы поддерживать расчетное ВГД равным требуемому ВГД. Способ обеспечивает регулирование ВГД, в т.ч. функцию его компенсации, что уменьшает потенциал интраоперационной гипотонии и вторичных осложнений.1 з.п. ф-лы, 4 ил.
1. Способ регулирования внутриглазного давления с использованием микрохирургической системы, содержащей хирургическую кассету, хирургическое устройство и компьютер, заключающийся в том, что
размещают хирургическую кассету в микрохирургической системе, причем хирургическая кассета содержит инфузионную камеру, содержащую жидкость для ирригации;
создают и поддерживают давление в микрохирургической системе посредством устройства для поддержания давления, гидравлически связанного с указанной хирургической кассетой и содержащего источник сжатого газа, электромагнитный пропорциональный клапан и газовую линию, гидравлически соединяющую источник сжатого газа, пропорциональный клапан и хирургическую кассету,
гидравлически связывают хирургическое устройство с хирургической кассетой посредством линии для инфузионной жидкости,
выбирают требуемое внутриглазное давление,
поддерживают давление в указанной инфузионной камере посредством газа, подаваемого под давлением из указанного источника сжатого газа в хирургическую кассету по газовой линии, чтобы обеспечить подачу ирригационной жидкости в хирургическое устройство по линии для инфузионной жидкости,
измеряют расход ирригационной жидкости в линии для жидкости, подают сигнал, соответствующий измеренному расходу ирригационной жидкости в компьютер,
вычисляют расчетное внутриглазное давление в компьютере в ответ на полученный сигнал,
используют компьютер для регулирования уровня давления сжатого газа путем подачи второго сигнала из компьютера на указанный пропорциональный клапан, чтобы поддерживать расчетное внутриглазное давление равным требуемому внутриглазному давлению.
2. Способ по п. 1, в котором измерение расхода ирригационной жидкости осуществляют с использованием неинвазивного датчика расхода.

