Изобретение относится к области микросистемной техники, в частности к приборам для измерения величины угловой скорости.
Известен интегральный микромеханический гироскоп [S.Е.Alper, Т.Akin, A Planar Gyroscope Using a Standard Surface Micromachining Process, The 14th European Conference on Solid-State Transducers (EUROSENSORS XIV), 2000, p.387, fig.1], содержащий подложку с расположенными на ней шестью электродами, инерционную массу, расположенную с зазором относительно подложки, образующую с парой расположенных на подложке электродов плоский конденсатор и связанную с внешним подвесом с помощью упругих балок, которые одними концами прикреплены к инерционной массе, а другими - к внешнему подвесу, образующему с двумя другими парами расположенных на подложке электродов плоские конденсаторы, используемые в качестве электростатических приводов, причем внешний подвес расположен с зазором относительно подложки с помощью системы упругих балок и опорных элементов.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
Недостатком конструкции гироскопа является невозможность измерения величины угловой скорости вокруг оси X, расположенной в плоскости подложки.
Функциональным аналогом заявляемого объекта является интегральный микромеханический гироскоп [В.Я.Распопов, Микромеханические приборы. Учебное пособие. Москва: Машиностроение, 2007, стр.59, рис.1.44], содержащий подложку с расположенными на ней электродами емкостных преобразователей перемещений, две инерционные массы, расположенные с зазором относительно подложки с помощью системы упругих балок и опорных элементов и образующие с расположенными на подложке электродами емкостных преобразователей перемещений плоские конденсаторы, один неподвижный электрод электростатического привода с гребенчатыми структурами по обеим его сторонам, расположенный на подложке между инерционными массами, с возможностью взаимопроникновения и электростатического взаимодействия с инерционными массами, два неподвижных электрода электростатических приводов с гребенчатыми структурами, расположенные на подложке по внешним сторонам инерционных масс, с возможностью взаимопроникновения и электростатического взаимодействия с инерционными массами.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Y, расположенной в плоскости подложки.
Недостатком конструкции гироскопа является невозможность измерения величины угловой скорости вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа, а также сложность конструкции, обусловленная использованием двух инерционных масс.
Наиболее близким по технической сущности к заявляемому объекту является интегральный микромеханический гироскоп [В.Я.Распопов, Микромеханические приборы. Учебное пособие, Москва: Машиностроение, 2007, стр.53, рис.1.36], содержащий подложку, инерционную массу, которая расположена с зазором относительно подложки с помощью системы упругих балок и опорных элементов, два гребенчатых электрода емкостных преобразователей перемещений расположенные на подложке с возможностью взаимопроникновения и электростатического взаимодействия с инерционной массой, два гребенчатых электрода электростатических приводов, расположенные на подложке с возможностью взаимопроникновения и электростатического взаимодействия с инерционной массой.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
Недостатком конструкции данного гироскопа является невозможность измерения величины угловой скорости вокруг оси Y, расположенной в плоскости подложки.
Задача предлагаемого изобретения состоит в создании интегрального микромеханического гироскопа, который позволил бы измерять величину угловой скорости вокруг оси Y, расположенной в плоскости подложки и вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа, а также в повышении точности измерения угловой скорости.
Для решения поставленной задачи в интегральный микромеханический гироскоп, содержащий подложку и инерционную массу, расположенные с зазором относительно друг друга, и два гребенчатых электрода электростатических приводов, размещенные на подложке с возможностью взаимопроникновения и электростатического взаимодействия с инерционной массой, согласно изобретению, дополнительно введены три пары электродов, образующих туннельные контакты, при этом один электрод каждой пары расположен на инерционной массе, а другой - на подложке, и четыре вспомогательных электрода, расположенных на подложке с возможностью электростатического взаимодействия с инерционной массой.
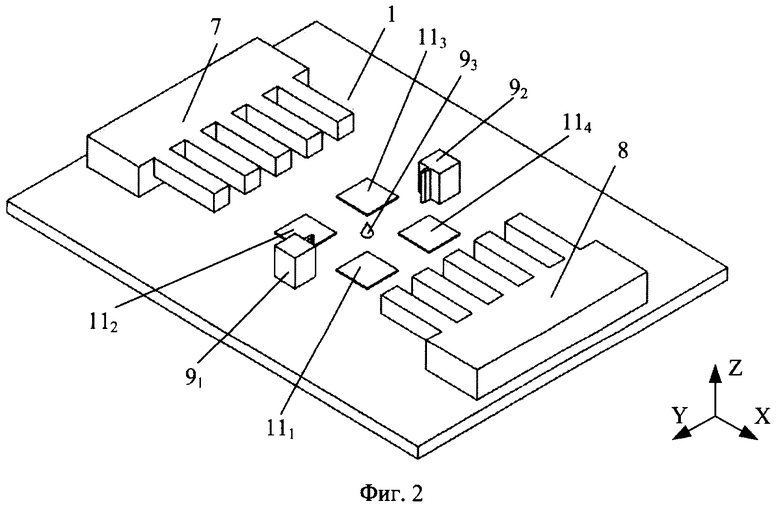
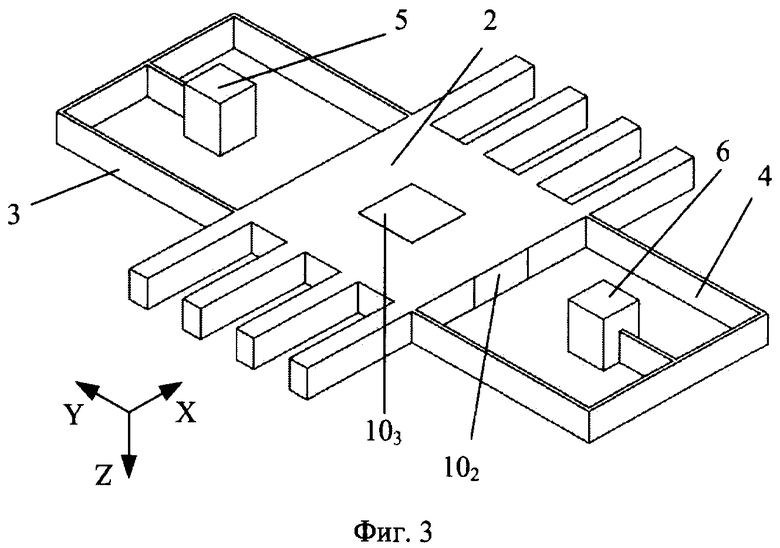
На фиг.1 представлен общий вид интегрального микромеханического гироскопа, на фиг.2 представлен общий вид интегрального микромеханического гироскопа со снятой инерционной массой, на фиг.3 представлен вид снизу на инерционную массу интегрального микромеханического гироскопа.
Интегральный микромеханический гироскоп (фиг.1) содержит подложку 1, инерционную массу 2, которая расположена с зазором относительно подложки 1 с помощью системы упругих балок 3, 4 и опорных элементов 5, 6. Два гребенчатых электрода 7, 8 электростатических приводов расположены на подложке 1 с возможностью взаимопроникновения и электростатического взаимодействия с инерционной массой 2. Интегральный микромеханический гироскоп также содержит три пары электродов, 91 и 101, 92 и 102, 93 и 103, образующих туннельные контакты. При этом один электрод каждой пары расположен на инерционной массе 2, а другой - на подложке 1. Кроме того, на подложке 1 расположены вспомогательные электроды 111, 112, 113, 114, с возможностью электростатического взаимодействия с инерционной массой 2.
Работа интегрального микромеханического гироскопа основана на преобразовании энергии первичных (вынужденных) колебаний в энергию вторичных колебаний при появлении переносной угловой скорости. Эти вторичные колебания содержат информацию об измеряемой угловой скорости. Таким образом, измерение амплитуды вторичных колебаний с помощью пар электродов 91 и 101, 92 и 102, 93 и 103, образующих туннельные контакты позволяет определить величину угловой скорости. Следует отметить, что первичные колебания называют также режимом движения, а вторичные - режимом чувствительности.
В режиме движения на гребенчатые электроды 7, 8 электростатических приводов относительно инерционной массы 2 подаются переменные напряжения, сдвинутые относительно друг друга по фазе на 180°. В результате между гребенчатыми электродами 7, 8 электростатических приводов и инерционной массой 2 возникает электростатическое взаимодействие, и инерционная масса 2 начинает совершать колебания вдоль оси X. При этом зазоры между электродами 91 и 101, 92 и 102, а также между электродами 93 и 103 не изменяются. При подаче напряжения питания между электродами 91 и 101, 92 и 102, а также между электродами 93 и 103 электроны, имеющие достаточную вероятность прохождения сквозь потенциальные барьеры, образованные зазорами в каждой паре, туннелируют из электродов 91, 92, 93 в электроды 101, 102, 103 соответственно и тем самым создают туннельные токи, которые являются выходными сигналами заявляемого устройства.
Установка начальных значений туннельных токов осуществляется с помощью вспомогательных электродов 111, 112, 113, 114. При подаче управляющих напряжений на вспомогательные электроды 111, 112, 113, 114 относительно инерционной массы 2 между вспомогательными электродами 111, 112, 113, 114 и инерционной массой 2 возникают силы электростатического взаимодействия. В результате упругие балки 3, 4 деформируются, что приводит к изменению ориентации инерционной массы 2 в пространстве, а следовательно, и к изменению величины туннельных токов. При этом устраняется влияние возможного первоначального крена инерционной массы, обусловленного технологическими погрешностями.
При появлении угловой скорости вокруг оси Y возникает сила инерции Кориолиса, вызывающая колебания инерционной массы 2 в направлении оси Z. Перемещение инерционной массы 2 вдоль оси Z измеряется с помощью электродов 93 и 103. Туннельный ток, протекающий между электродами 93 и 103, изменяется за счет изменения зазора между ними, характеризуя величину угловой скорости. При этом зазоры между электродами 91 и 101, 92 и 102, а следовательно и соответствующие туннельные токи между ними не изменяются.
При появлении угловой скорости вокруг оси Z возникает сила инерции Кориолиса, вызывающая колебания инерционной массы 2 в направлении оси Y. Перемещение инерционной массы 2 вдоль оси Y измеряется с помощью электродов 91 и 101, 92 и 102. Туннельные токи, протекающие между электродами 91 и 101, 92 и 102 изменяются за счет изменения зазоров между ними, характеризуя величину угловой скорости. При этом зазор между электродами 93 и 103, а следовательно и соответствующий туннельный ток между ними не изменяется.
При работе в компенсационном режиме сила, воздействующая на инерционную массу, вызванная измеряемой угловой скоростью, уравновешивается с помощью напряжений обратной связи, прикладываемых между вспомогательными электродами 111, 112, 113, 114 и инерционной массой 2. В результате туннельные токи, протекающие между электродами 91 и 101, 92 и 102, 93 и 103 поддерживаются постоянными. Выходными сигналами при работе в режиме компенсационного измерения являются величины напряжений обратной связи между вспомогательными электродами и инерционной массой.
Таким образом, предлагаемое изобретение представляет интегральный микромеханический гироскоп, позволяющий измерять величину угловой скорости вокруг оси Y, расположенной в плоскости подложки, и вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
По сравнению с известными устройствами, предлагаемый интегральный микромеханический гироскоп позволяет уменьшить площадь подложки, используемую для размещения измерительных элементов, так как для измерения величины угловой скорости вокруг оси Y, расположенной в плоскости подложки, и вокруг оси Z, направленной перпендикулярно плоскости подложки, используется только один интегральный микромеханический гироскоп. Кроме того, предлагаемый интегральный микромеханический гироскоп позволяет повысить точность измерения угловой скорости за счет использования туннельных контактов в качестве преобразователей перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегральный микромеханический гироскоп-акселерометр | 2018 |
|
RU2683810C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2266521C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2490593C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2300773C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2503924C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2353903C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2006 |
|
RU2304273C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2251077C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2011 |
|
RU2477863C1 |
Изобретение относится к области микросистемной техники, в частности к приборам для измерения величины угловой скорости. Гироскоп содержит подложку и инерционную массу, расположенные с зазором относительно друг друга, два гребенчатых электрода электростатических приводов, а также три пары электродов, образующих туннельные контакты, используемые в качестве преобразователей перемещений, при этом один электрод каждой пары расположен на инерционной массе, а другой - на подложке, и четыре вспомогательных электрода, расположенных на подложке с возможностью электростатического взаимодействия с инерционной массой. Изобретение позволяет измерять величины угловой скорости вокруг оси Y, расположенной в плоскости подложки, и вокруг оси Z, направленной перпендикулярно плоскости подложки интегрального микромеханического гироскопа, а также повысить точность измерения угловой скорости. 3 ил.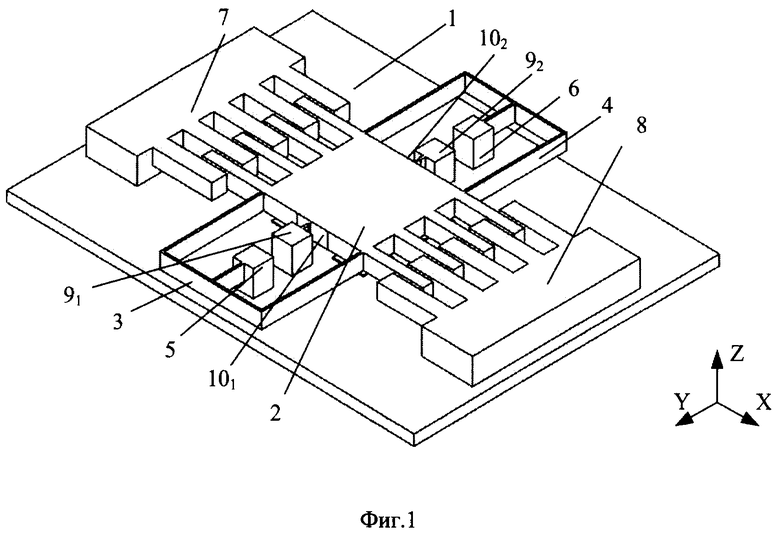
Интегральный микромеханический гироскоп, содержащий подложку и инерционную массу, расположенные с зазором относительно друг друга, и два гребенчатых электрода электростатических приводов, размещенные на подложке с возможностью взаимопроникновения и электростатического взаимодействия с инерционной массой, отличающийся тем, что он дополнительно содержит три пары электродов, образующих туннельные контакты, при этом один электрод каждой пары расположен на инерционной массе, а другой - на подложке, и четыре вспомогательных электрода, расположенных на подложке с возможностью электростатического взаимодействия с инерционной массой.
| РАСПОПОВ В.Я | |||
| Микромеханические приборы | |||
| Учебное пособие | |||
| - М.: Машиностроение, 2007, с.53, 59 | |||
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2300773C1 |
| JP 3041367 А, 21.02.1991 | |||
| US 5679888 А, 21.10.1997 | |||
| ALPER S.E | |||
| et al | |||
| A Planar Gyroscope Using a Standard Surface Micromachining Process, The 14 European Conference on Solid-State Transducers (EUROSENSORS XIV), 2000, p.387. | |||

