Предполагаемое изобретение относится к области измерительной техники и интегральной электроники, а более конкретно - к интегральным измерительным элементам величины угловой скорости.
Известен интегральный микромеханический гироскоп [В.П.Тимошенков, С.П.Тимошенков, А.А.Миндеева, Разработка конструкции микрогироскопа на основе КНИ-технологии, Известия вузов, Электроника, №6, 1999, стр.49, рис.2], содержащий диэлектрическую подложку с напыленными на ней четырьмя электродами и инерционную массу, расположенную с зазором относительно диэлектрической подложки, выполненную в виде пластины из полупроводникового материала, образующую с парой напыленных на подложку электродов плоский конденсатор и связанную с внутренней колебательной системой с помощью упругих балок, выполненных из полупроводникового материала, которые одними концами жестко прикреплены к инерционной массе, а другими - к внутренней колебательной системе, выполненной из полупроводникового материала, образующей с другой парой напыленных на подложку электродов плоский конденсатор, используемый в качестве электростатического привода, причем колебательная система соединена с внешней рамкой с помощью упругих балок, выполненных из полупроводникового материала, которые одними концами прикреплены к внутренней колебательной системе, а другими - к внешней рамке, выполненной из полупроводникового материала и расположенной непосредственно на диэлектрической подложке.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
Недостатком конструкции гироскопа является невозможность измерения величин угловых скоростей вокруг двух взаимно перпендикулярных осей Х и Y, расположенных в плоскости подложки.
Функциональным аналогом заявляемого объекта является микромеханический вибрационный гироскоп [А.В.Корляков, В.В.Лучинин, П.П.Мальцев, Микромеханические структуры на основе композиции “карбид кремний - нитрид алюминия”, том 28, №3, 1999, стр.210, рис.9], содержащий диэлектрическую подложку с напыленными на ней электродами электростатического привода с гребенчатыми зубцами, электродами емкостного преобразователя перемещений и инерционную массу, расположенную с зазором относительно диэлектрической подложки и связанную с ней через симметричную систему упругих балок из полупроводникового материала, которые одними концами прикреплены к опоре, расположенной на диэлектрической подложке, а другими - к инерционной массе, выполненной из полупроводникового материала в форме кольца со сквозными отверстиями и с боковыми гребенчатыми зубцами электродов инерционной массы, с возможностью электростатического взаимодействия в плоскости инерционной массы через боковые зазоры и взаимопроникающие друг в друга гребенки электродов инерционной массы и электродов электростатического привода, и образующую с электродами емкостного преобразователя перемещений плоский конденсатор.
Данный гироскоп позволяет измерять величины угловых скоростей при вращении его вокруг двух взаимно перпендикулярных осей Х и Y, расположенных в плоскости подложки.
Недостатком конструкции данного гироскопа является невозможность измерения величины угловой скорости вокруг оси Z, направленной перпендикулярно плоскости подложки.
Из известных наиболее близким по технической сущности к заявляемому объекту является интегральный микромеханический гироскоп [В.Я.Распопов, Микромеханические приборы, Учебное пособие, Тул. гос. университет, Тула, 2002, стр.32, рис.1.26], содержащий диэлектрическую подложку с расположенными на ней металлическими электродами емкостных преобразователей перемещений, две инерционные массы, расположенные с зазором относительно диэлектрической подложки и выполненные в виде пластин из полупроводникового материала, образующие с расположенными на диэлектрической подложке электродами емкостных преобразователей перемещений плоские конденсаторы, и связанные с диэлектрической подложкой через систему упругих балок, которые одними концами соединены с инерционными массами, а другими - с опорами, выполненными из полупроводникового материала и расположенными на диэлектрической подложке, один электрод электростатического привода с гребенчатыми структурами по обеим его сторонам, выполненный из полупроводникового материала и расположенный на диэлектрической подложке между инерционными массами, с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенками электродов, два электрода электростатических приводов с гребенчатыми структурами, выполненные из полупроводникового материала и расположенные на диэлектрической подложке по внешним сторонам инерционных масс, с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенками электродов.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси X, расположенной в плоскости подложки (фиг.1).
Недостатком конструкции данного гироскопа является невозможность измерения величин угловых скоростей вокруг осей: Y, расположенной перпендикулярно оси Х в плоскости подложки гироскопа, и Z, направленной перпендикулярно плоскости подложки.
Задача предлагаемого изобретения - возможность измерения величины угловой скорости вокруг осей Х и Y, расположенных взаимно перпендикулярно в плоскости подложки, и Z, направленной перпендикулярно плоскости подложки гироскопа.
Технический результат, достигаемый при осуществлении предполагаемого изобретения, заключается в возможности измерения величины угловой скорости вокруг осей Х и Y, расположенных взаимно перпендикулярно в плоскости подложки, и Z, направленной перпендикулярно плоскости подложки гироскопа.
Технический результат достигается за счет введения двух дополнительных электродов емкостных преобразователей перемещений, расположенных на подложке, двух дополнительных инерционных масс, выполненных в виде пластин из полупроводникового материала, расположенных с зазором относительно подложки так, что они образуют с дополнительными электродами емкостных преобразователей перемещений плоские конденсаторы за счет их частичного перекрытия, четырех дополнительных пластин, выполненных из полупроводникового материала, и пяти дополнительных электродов электростатических приводов, выполненных из полупроводникового материала и расположенных на подложке по внешним сторонам инерционных масс с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры, причем электроды емкостных преобразователей перемещений, инерционные массы и электроды электростатических приводов размещены так, что образуют две пары чувствительных элементов, расположенные вдоль двух взаимно перпендикулярных осей в плоскости подложки, причем подложка и электроды емкостных преобразователей перемещений выполнены из полупроводникового материала.
Для достижения необходимого технического результата в интегральный микромеханический гироскоп, содержащий подложку с расположенными на ней электродами емкостных преобразователей перемещений, две инерционные массы, расположенные с зазором относительно подложки и выполненные в виде пластин из полупроводникового материала, образующие с электродами емкостных преобразователей перемещений плоские конденсаторы, и электроды электростатических приводов, выполненные из полупроводникового материала и расположенные на подложке по внешним сторонам инерционных масс с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры, введены два дополнительных электрода емкостных преобразователей перемещений, расположенных на подложке, две дополнительные инерционные массы, выполненные в виде пластин из полупроводникового материала и расположенные с зазором относительно подложки так, что они образуют с дополнительными электродами емкостных преобразователей перемещений плоские конденсаторы за счет их частичного перекрытия, четыре дополнительные пластины, выполненные из полупроводникового материала, пять дополнительных электродов электростатических приводов, выполненные из полупроводникового материала и расположенные на подложке по внешним сторонам инерционных масс с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры, причем электроды емкостных преобразователей перемещений, инерционные массы и электроды электростатических приводов размещены так, что образуют две пары чувствительных элементов, расположенные вдоль двух взаимно перпендикулярных осей в плоскости подложки, причем подложка и электроды емкостных преобразователей перемещений выполнены из полупроводникового материала.
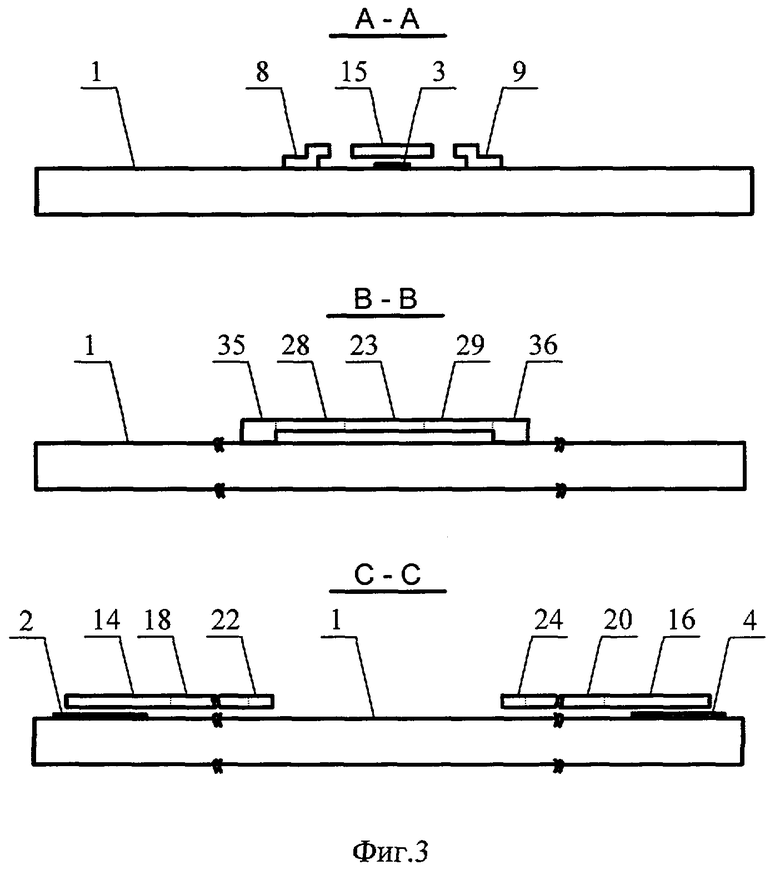
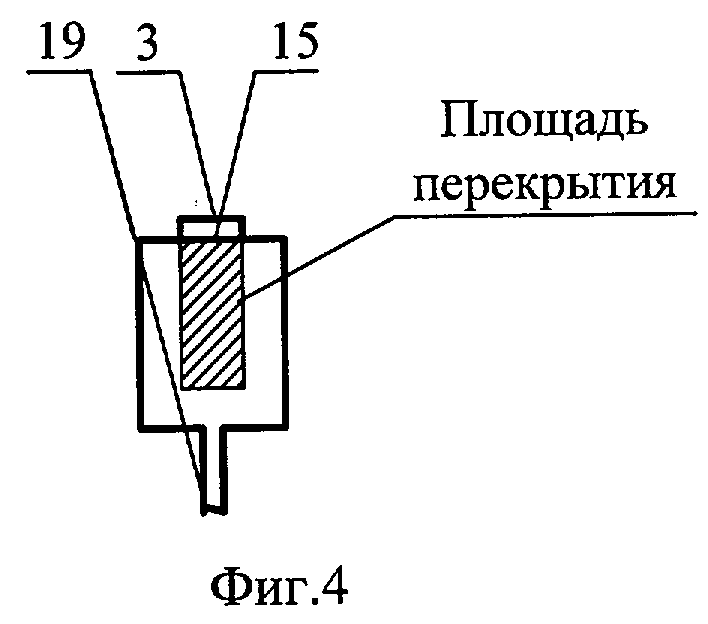
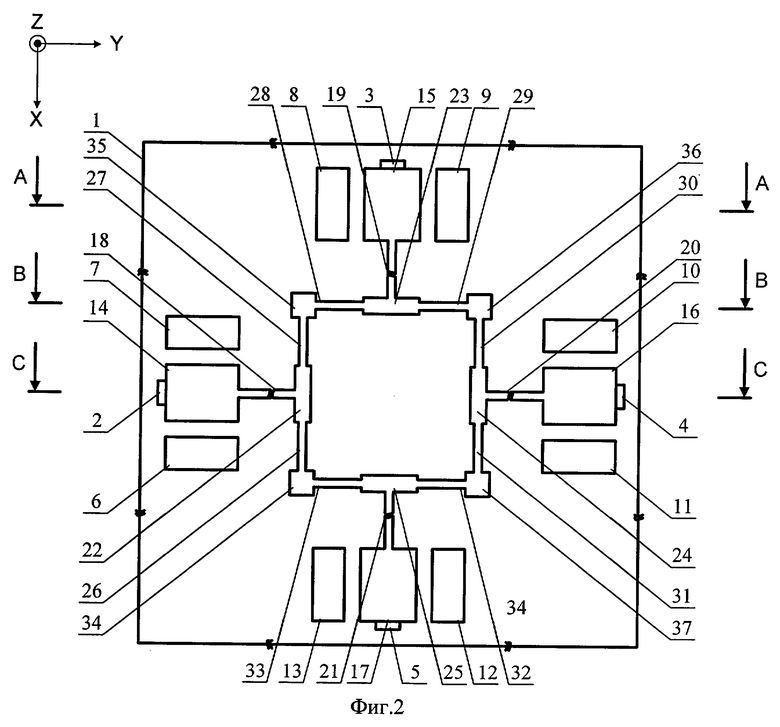
На фиг.1 приведена топология прототипа интегрального микромеханического гироскопа. На фиг.2 приведена топология предлагаемого интегрального микромеханического гироскопа и показаны сечения. На фиг.3 приведена структура интегрального микромеханического гироскопа. На фиг.4 показано перекрытие инерционной массы и электрода емкостного преобразователя перемещений.
Интегральный микромеханический гироскоп содержит полупроводниковую подложку 1 с расположенными на ней четырьмя электродами емкостных преобразователей перемещений 2, 3, 4, 5, выполненных из полупроводникового материала, восемь электродов электростатических приводов 6, 7, 8, 9, 10, 11, 12, 13, выполненных из полупроводникового материала и расположенных на полупроводниковой подложке 1, четыре инерционные массы 14, 15, 16, 17, выполненные в виде пластин из полупроводникового материала, расположенные с зазором относительно полупроводниковой подложки 1, образующие с расположенными на полупроводниковой подложке 1 электродами емкостных преобразователей перемещений 2, 3, 4, 5 плоские конденсаторы за счет их частичного перекрытия, и образующие электростатическое взаимодействие с электродами электростатических приводов 6, 7, 8, 9, 10, 11, 12, 13 в плоскости их пластин через боковые зазоры, и связанных с полупроводниковой подложкой 1 через систему упругих подвесов, в которой балки 18, 19, 20, 21, выполненные из полупроводникового материала, одними концами соединены с инерционными массами 14, 15, 16, 17, а другими - с пластинами 22, 23, 24, 25, выполненными из полупроводникового материала, и балки 26, 27, 28, 29, 30, 31, 32, 33, выполненные из полупроводникового материала, соединенные одними концами с пластинами 22, 23, 24, 25, а другими - с опорами 34, 35, 36, 37, выполненными из полупроводникового материала и расположенными на полупроводниковой подложке 1.
Работает устройство следующим образом.
При подаче на электроды электростатических приводов 6, 8, 10, 12 и 7, 9, 11, 13 переменных напряжений, сдвинутых относительно друг друга по фазе на 180°, относительно инерционных масс 14, 15, 16, 17, между ними возникает электростатическое взаимодействие, что приводит к возникновению колебаний инерционных масс 14, 15, 16, 17 в плоскости полупроводниковой подложки 1 относительно пластин 22, 23, 24, 25, связанных с инерционными массами балками 18, 19, 20, 21. Пластины 22, 23, 24, 25 снижают (демпфируют) воздействие колебаний инерционных масс 14, 15, 16, 17 на балки 26, 27, 28, 29, 30, 31, 32, 33, соединяющие пластины 22, 23, 24, 25 с опорами 34, 35, 36, 37. Зазор между электродами емкостных преобразователей перемещений 2, 3, 4, 5 и инерционными массами 14, 15, 16, 17 соответственно, а также площадь их взаимного перекрытия не изменяются. Напряжения, генерируемые на емкостных преобразователях перемещений, образованных электродами 2, 3, 4, 5 и инерционными массами 14, 15, 16, 17 соответственно одинаковы.
При возникновении вращения полупроводниковой подложки 1 (угловой скорости) вокруг одной из двух взаимно перпендикулярных осей (ось X), расположенных в плоскости полупроводниковой подложки 1, инерционные массы 15, 17, образующие одну пару чувствительных элементов и расположенные вдоль данной оси, под действием силы Кориолиса начинают совершать колебания перпендикулярно плоскости полупроводниковой подложки 1 в противофазе друг к другу. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных электродами 3, 5 и инерционными массами 15, 17 соответственно за счет изменения величины зазора между ними, характеризует величину угловой скорости.
При возникновении вращения полупроводниковой подложки 1 (угловой скорости) вокруг другой оси, расположенной в плоскости полупроводниковой подложки 1 (ось Y), инерционные массы 14, 16, образующие вторую пару чувствительных элементов и расположенные вдоль данной оси, под действием силы Кориолиса начинают совершать колебания перпендикулярно плоскости полупроводниковой подложки 1 в противофазе друг другу. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных электродами 2, 4 и инерционными массами 14, 16 соответственно за счет изменения величины зазора между ними, характеризует величину угловой скорости.
При возникновении вращения полупроводниковой подложки 1 (угловой скорости) вокруг оси, направленной перпендикулярно плоскости полупроводниковой подложки 1 (ось Z), инерционные массы 14, 16 и 15, 17, образующие две пары чувствительных элементов, расположенные вдоль двух взаимно перпендикулярных осей в плоскости полупроводниковой подложки 1 и перпендикулярно данной оси, под действием силы Кориолиса начинают совершать колебания в плоскости полупроводниковой подложки 1, направленные вдоль осей Y и X соответственно в противофазе друг к другу в парах. Колебания инерционных масс 14, 16 и 15, 17 через балки 18, 20 и 19, 21 передаются пластинам 22, 24 и 23, 25 соответственно, которые начинают совершать колебания в плоскости полупроводниковой подложки 1 относительно опор 34, 35, 36, 37 за счет упругой связи с ними, образованной балками 26, 27 и 28, 29 и 30, 31 и 32, 33 соответственно. Разность напряжений в парах, генерируемых на емкостных преобразователях перемещений, образованных электродами 2, 3, 4, 5 и инерционными массами 14, 15, 16, 17 соответственно за счет изменения их площади взаимного перекрытия, характеризует величину угловой скорости.
Таким образом, предлагаемое устройство представляет собой интегральный микромеханический гироскоп, позволяющий измерять величину угловой скорости вокруг осей Х и Y, расположенных взаимно перпендикулярно в плоскости подложки, и Z, направленной перпендикулярно плоскости подложки гироскопа.
Введение двух дополнительных электродов емкостных преобразователей перемещений, расположенных на подложке, двух дополнительных инерционных масс, выполненных в виде пластин из полупроводникового материала, расположенных с зазором относительно подложки так, что они образуют с дополнительными электродами емкостных преобразователей перемещений плоские конденсаторы за счет их частичного перекрытия, четырех дополнительных пластин, выполненных из полупроводникового материала, и пяти дополнительных электродов электростатических приводов, выполненных из полупроводникового материала и расположенных на подложке по внешним сторонам инерционных масс с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры, причем электроды емкостных преобразователей перемещений, инерционные массы и электроды электростатических приводов размещены так, что образуют две пары чувствительных элементов, расположенных вдоль двух взаимно перпендикулярных осей в плоскости подложки, причем подложка и электроды емкостных преобразователей перемещений выполнены из полупроводникового материала, позволяет измерять величину угловой скорости вокруг осей Х и Y, расположенных взаимно перпендикулярно в плоскости подложки, и Z, направленной перпендикулярно плоскости подложки гироскопа, что позволяет использовать предлагаемое изобретение в качестве интегрального измерительного элемента величины угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2353903C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2005 |
|
RU2293337C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2266521C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2007 |
|
RU2334237C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2300773C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351897C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2006 |
|
RU2304273C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2011 |
|
RU2455652C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2016 |
|
RU2649249C1 |

Изобретение относится к области измерительной техники и интегральной электроники, а более конкретно - к интегральным измерительным элементам величины угловой скорости. Интегральный механический гироскоп содержит полупроводниковую подложку с расположенными на ней электродами емкостных преобразователей перемещений и электродами электростатических приводов, выполненных из полупроводникового материала, и четыре инерционные массы, выполненные в виде пластин из полупроводникового материала, расположенные с зазором относительно подложки и образующие с электродами емкостных преобразователей перемещений плоские конденсаторы за счет их частичного перекрытия и электростатического взаимодействия с электродами электростатических приводов в плоскости их пластин через боковые зазоры. Инерционные массы и электроды размещены так, что образуют две пары чувствительных элементов, расположенные вдоль двух взаимно перпендикулярных осей в плоскости подложки. Техническим результатом является возможность измерения величины угловой скорости вокруг осей Х и Y, расположенных взаимно перпендикулярно в плоскости подложки, и оси Z, направленной перпендикулярно плоскости подложки гироскопа. 4 ил.
Интегральный микромеханический гироскоп, содержащий подложку с расположенными на ней электродами емкостных преобразователей перемещений, две инерционные массы, расположенные с зазором относительно подложки и выполненные в виде пластин из полупроводникового материала, образующие с электродами емкостных преобразователей перемещений плоские конденсаторы, и электроды электростатических приводов, выполненные из полупроводникового материала и расположенные на подложке по внешним сторонам инерционных масс с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры, отличающийся тем, что в него введены два дополнительных электрода емкостных преобразователей перемещений, расположенных на подложке, две дополнительные инерционные массы, выполненные в виде пластин из полупроводникового материала и расположенные с зазором относительно подложки так, что они образуют с дополнительными электродами емкостных преобразователей перемещений плоские конденсаторы за счет их частичного перекрытия, четыре дополнительные пластины, выполненные из полупроводникового материала, пять дополнительных электродов электростатических приводов, выполненных из полупроводникового материала и расположенных на подложке по внешним сторонам инерционных масс с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры, причем электроды емкостных преобразователей перемещений, инерционные массы и электроды электростатических приводов размещены так, что образуют две пары чувствительных элементов, расположенные вдоль двух взаимно перпендикулярных осей в плоскости подложки, причем подложка и электроды емкостных преобразователей перемещений выполнены из полупроводникового материала.
| РАСПОПОВ В.Я | |||
| Микромеханические приборы | |||
| Учебное пособие | |||
| Тульский госуниверситет | |||
| Тула, 2002, с.32 | |||
| ГАЙ Э | |||
| Наводящиеся снаряды с инерциальной навигационной системой на микромеханических датчиках, интегрированной с GPS | |||
| Гироскопия и навигация | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| RU 92012459 A, 27.08.1995 | |||
| УСТРОЙСТВО ДЛЯ КОНДЕНСАЦИИ ПАРА И ПОДОГРЕВА КОНДЕНСИРУЕМЫМ ПАРОМ ТОПОЧНОГО ВОЗДУХА В ПАРОВОЗАХ-КОМПАУНД | 1929 |
|
SU28916A1 |
| US 5952572 A, 14.09.1999 | |||
| US 6393913 B1, 28.05.2002. | |||

