Изобретение относится к области оптического приборостроения, точнее - к лазерным изображающим системам, способным формировать изображение удаленных объектов как ночью, так и днем. Объект наблюдения подсвечивается лазерным излучением, а при отражении от него излучение регистрируется оптико-электронным устройством на основе многоэлементного приемника. Кроме формирования изображения объекта устройство определяет его угловые координаты (φх, φy) и измеряет дальность.
Особый класс объектов локации составляют т.н. световозвращающие объекты - уголковые отражатели, стеклосферы, оптико-электронные приборы с коллимационной схемой и др. При лазерной локации таких объектов зондирующее излучение отражается в направлении источника излучения в широких углах подсвета.
По патенту РФ №2269804 (2006, МПК G02B 23/12, G01S 17/88) известно лазерное локационное устройство для наблюдения удаленного, в том числе и световозвращающего объекта, являющееся ближайшим аналогом и содержащее два приемных канала и один передающий канал.
Данное устройство имеет следующие недостатки:
1. Наличие отдельного канала измерения дальности, ведущее к существенному увеличению сложности и габаритов приемного канала устройства (введению еще одной приемной оптической системы).
2. Малое поле зрения канала измерения дальности (2…4 угл. мин), которое приводит к необходимости высокоточного наведения на световозвращатель канала измерения дальности, требующее дополнительных механизмов выбора цели, визирования и юстировки дальномерного канала.
3. Двухканальная система требует сложной конструкции для устранения параллакса канала измерения дальности и канала измерения угловых координат на основе ФПЗС-матрицы.
4. Требуется дополнительное время для переключения внимания оператора между каналами измерения дальности и положения объекта или в случае электронного механизма наведения - выбора цели.
Задачей настоящего изобретения является создание одноканального устройства для обнаружения световозвращающих оптических систем и определения дальности до них, в котором угловые координаты положения световозвращающего объекта и дальность до него определяются с использованием единственного приемного канала на основе ФПЗС-матрицы за счет фазовой манипуляции импульсами подсвета и обработки амплитуды отраженного от цели сигнала и без требования высокоточного наведения на световозвращатель.
Технический результат, достигаемый при реализации предлагаемого устройства:
- возможность определения дальности до всех объектов, попадающих в поле зрения ФПЗС-матрицы без дополнительных устройств и средств наведения,
- упрощение конструкции,
- уменьшение требований к точности наведения на цель,
- единственную приемную оптическую систему,
- уменьшение количества согласующих электронных устройств.
Технический результат достигается за счет того, что в устройстве для обнаружения световозвращающих оптических систем и определения дальности до них, содержащем приемный и передающий каналы, причем передающий канал содержит полупроводниковый лазер, вход которого соединен с выходом драйвера лазера, и передающую оптическую систему, а в приемном канале установлен приемный объектив, в фокальной плоскости которого находится ФПЗС-матрица, первый выход которой соединен со входом аналогово-цифрового преобразователя (АЦП), и монитор, дополнительно введены буфер кадра, счетчик кадров, блок памяти кадра, инвертор, сумматор, измеритель угловых координат, пороговое устройство, блок расчета дальности, блок формирования времени упреждения Туп, причем выход АЦП соединен со входом буфера кадра, первый выход которого соединен с первым входом монитора, второй выход - со входом счетчика кадров, третий выход - со входом инвертора, а четвертый выход - со входа блока памяти кадра, выходы блока памяти кадра и инвертора соединены соответственно с первым и вторым входами сумматора, выход которого соединен со входом порогового устройства, выход счетчика кадров соединен с первым входом блока расчета дальности, второй вход которого соединен с первым выходом порогового устройства, первый выход блока расчета дальности соединен с третьим входом монитора, а второй - с первым входом блока формирования времени упреждения Туп, второй вход которого соединен со вторым выходом ФПЗС-матрицы, второй выход порогового устройства соединен с измерителем угловых координат, выход которого соединен со вторым входом монитора, выход блока формирования времени упреждения Туп соединен со входом драйвера лазера, при этом блок расчета дальности выполнен с возможностью вычисления дальности по формуле:
Lоб=[Ty0-ΔTy(n*-1)]c/2,
где c - скорость света;
Ty0=2Lmax/c;
Lmax - максимальная дальность, измеряемая устройством;
ΔTy=ΔL/c;
ΔL - погрешность измерения расстояния до световозвращающего объекта;
n* - номер кадра, в котором появился отраженный сигнал.
Более подробное предлагаемое изобретение поясняется следующими чертежами.
Фиг.1 - блок-схема предлагаемого одноканального устройства для обнаружения световозвращающих оптических систем и определения дальности до них.
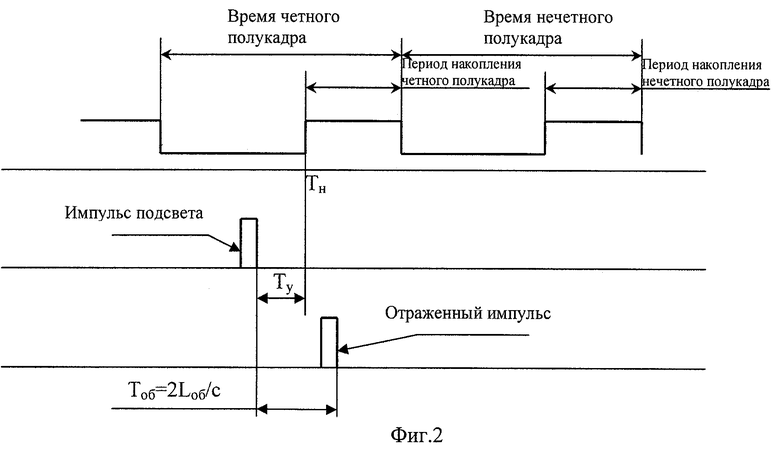
Фиг.2 - временная диаграмма работы устройства.
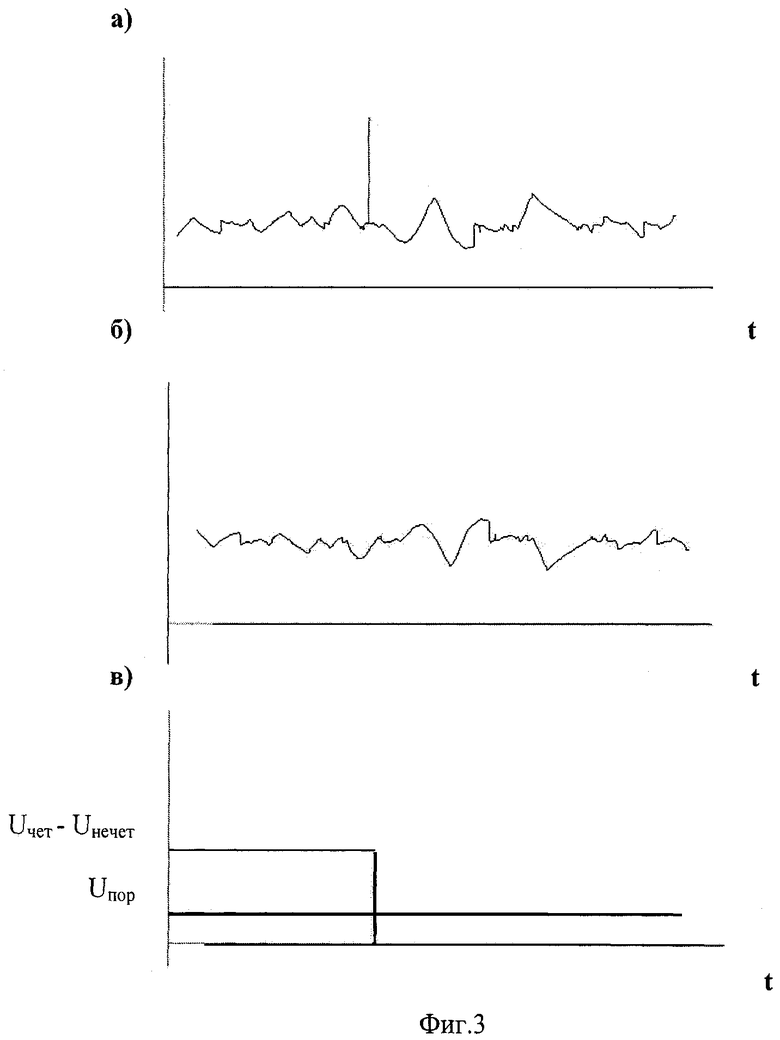
Фиг.3a-3в поясняют выделение сигнала, отраженного от световозвращающей системы.
На фиг.1 показана блок-схема предлагаемого одноканального устройства для обнаружения световозвращающих оптических систем и определения дальности до них. Устройство содержит один приемный и один передающий каналы. Передающий канал содержит полупроводниковый лазер 1, вход которого соединен с выходом драйвера лазера 17, и передающую оптическую систему 2. В приемном канале установлен приемный объектив 3, в фокальной плоскости которого находится ФПЗС-матрица 4, первый выход которой соединен со входом аналогово-цифрового преобразователя (АЦП) 5, выход которого соединен со входом буфера кадра 6, первый выход которого соединен с первым входом монитора 8, второй выход - со входом счетчика кадров 9, третий выход - со входом инвертора 11, а четвертый выход - со входом блока памяти кадра 10. Выходы блока памяти кадра 10 и инвертора 11 соединены соответственно с первым и вторым входами сумматора 12, выход которого соединен со входом порогового устройства 13. Выход счетчика кадров 9 соединен с первым входом блока расчета дальности 15, второй вход которого соединен с первым выходом порогового устройства 13. Первый выход блока расчета дальности 15 соединен с третьим входом монитора 8, а второй - с первым входом блока формирования времени упреждения Tуп 16, второй вход которого соединен со вторым выходом ФПЗС-матрицы. Второй выход порогового устройства 13 соединен с измерителем угловых координат 14, выход которого соединен со вторым входом монитора 8. Выход блока формирования времени упреждения Туп 16 соединен со входом драйвера лазера 17. Блок расчета дальности выполнен с возможностью вычисления дальности по формуле:
Lоб=[Ty0-ΔTy(n*-1)]c/2,
где c - скорость света;
Ty0=2Lmax/c;
Lmax - максимальная дальность, измеряемая устройством;
ΔTy=ΔL/c;
ΔL - погрешность измерения расстояния до световозвращающего объекта;
n* - номер кадра, в котором появился отраженный сигнал.
Обнаружение световозвращающих оптических систем и определения дальности в предлагаемом одноканальном устройстве для обнаружения световозвращающих оптических систем и определения дальности до них обеспечивается за счет последовательного изменения времени упреждения лазерного импульса относительно начала времени накопления четного полукадра ФПЗС-матрицы и применения обработки сигнала, позволяющей вычислить дальность до объекта. Для этого в устройстве во время четных полукадров формируют последовательность импульсов подсвета, для которых время упреждения определяется по формуле:
Tyn=Ty0-ΔTy(n-1),
где n=1, 2, 3… - номер кадра, формируемого ФПЗС-матрицей;
Ty0=2Lmax/c - время упреждения для максимальной дальности, которую может измерить устройство;
Lmax - максимальная дальности, которую может измерить устройство;
c - скорость света;
ΔTy=ΔL/c,
где ΔL - точность измерения расстояния до объекта.
При п*=[(Ty0 - 2Lоб/c)/ΔTy+1],
где n* - номер кадра, в котором появился отраженный сигнал;
Lоб - дальность (расстояние) до объекта;
отраженный от объекта сигнал попадет в период накопления четного полукадра ФПЗС-матрицы (см. фиг.2).
Отраженный от световозвращающего объекта сигнал в период накопления четного полукадра будет заметен на устройстве отображения (мониторе). При n<n* отраженный от световозвращающего объекта сигнал не попадает во время накопления четного полукадра кадра и, следовательно, не регистрируется ФПЗС-матрицей. Таким образом, последовательно меняя n, а значит и время упреждения Tyn, возможно определить значение n* по факту появления сигнала от световозвращателя на ФПЗС-матрице, а затем определить дальность до световозвращающего объекта по выражению:
Lоб=[Ty0-ΔTy(n*-1)]c/2.
Устройство работает следующим образом.
Работа системы начинается с того, что для формирования импульса лазера в блоке расчета дальности 15 формируется импульс длительностью Ty0-ΔTy(n-1), при этом величина n (номер кадра) поступает на первый вход блока расчета дальности с выхода счетчика кадров 9. Таким образом при n=1 время упреждения Tyn=Ty0=2Lmax/c. Импульс длительностью 2Lmax/c со второго выхода блока расчета дальности 15 передается на первый вход блока формирования времени упреждения Туп, на второй вход которого на основе строба начала периода накопления поступает информация о начале периода накопления Тн со второго выхода ФПЗС-матрицы 4 (см. фиг.2). Зная Тн и 2Lmax/c, блок формирования времени упреждения Туп 16 формирует импульс длительностью Тн-2Lmax/с относительно начала времени накопления Тн четного полукадра ФПЗС-матрицы 4. С выхода блока формирования времени упреждения Туп 16 сигнал упреждения поступает на вход драйвера лазера 17, который и включает полупроводниковый лазер.
В том случае, если световозвращающий объект 7 находится на расстоянии Lmax, т.е. Lоб=Lmax, он подсвечивается и отраженный от него импульс попадает во время периода накопления четного полукадра ФПЗС-матрицы. В этом случае на ФПЗС-матрице будет регистрироваться сигнал от объекта 7. Если Lоб<Lmax, то отраженный сигнал придет на приемную оптическую систему раньше, чем начнется период накопления заряда ФПЗС-матрицы 4 и не будет регистрироваться матрицей.
Следовательно, для регистрации объекта 7 ФПЗС-матрицей необходимо установить время упреждения Туп=2Lоб/c. Для этого в предлагаемом устройстве одновременно с увеличением номера кадра n осуществляется последовательное уменьшение времени упреждения Tyn до величины 2Lоб/c, в результате чего получают регистрацию отраженного от объекта сигнала на ФПЗС-матрице. Уменьшать величину Туп наиболее целесообразно с шагом ΔТу, тогда погрешность измерения расстояния не превысит ΔL=ΔТус/2.
Таким образом, при формировании во время только четного полукадра каждого импульса лазера 1 зондирующее излучение, пройдя формирующую передающую оптическую систему 2, попадает на световозвращающий объект 7. Часть отраженного от объекта излучения попадает во входной зрачок приемного объектива 3 и далее на ФПЗС-матрицу 4. При этом на чувствительной поверхности ФПЗС-матрицы приемный объектив 3 формирует оптическое изображение наблюдаемого пространства, в том числе и световозвращающего объекта 7, если он расположен на соответствующей дальности. С первого выхода ФПЗС-матрицы 4 электрический видеосигнал поступает на вход АЦП 5, выход которого соединен со входом буфера кадра 6, с первого выхода которого сигнал изображения полукадра поступает на первый вход монитора с сумматором (далее - монитор) 8, со второго выхода буфера кадра 6 сигнал, содержащий информацию о номере кадра, поступает на вход счетчика кадров 9, с третьего выхода буфера кадра 6 сигнал, содержащий информацию о нечетном полукадре, поступает на вход инвертора 11, а с четвертого выхода сигнал, содержащий информацию о четном полукадре, поступает на вход блока памяти кадра 10.
В блоке памяти кадра размещается информация о текущем четном полукадре Uчет (фиг.3а), в инверторе 11 обрабатывается нечетный полукадр (Uнечет), т.е. происходит инвертирование амплитуды сигнала (см. фиг.3б). Затем информация с выходов блока памяти кадра и инвертора поступает соответственно на первый и второй входы сумматора 12, на выходе которого, при наличии отраженного сигнала, получается сигнал в виде короткого импульса (см. фиг.3в), равный разности четного и нечетного полукадров. Этот сигнал представляет собой блик от световозвращающего объекта, а изображение подстилающей поверхности отсутствует после вычитания полукадров. При этом следует отметить, что при чересстрочной развертке вычитание полукадров приводит к небольшой погрешности, равной угловому размеру строки - минимальный размер объекта должен быть равен угловому размеру двух строк ФПЗС-матрицы при пересчете через ее оптическую систему, что, как правило, выполняется для большинства световозвращающих объектов.
Далее сигнал с выхода сумматора 12 поступает на вход порогового устройства 13, которое определяет наличие сигнала от объекта (появление импульса, превышающего порог) и передает его (сигнал) через второй выход на вход измерителя угловых координат 14, где формируется метка для отображения на мониторе 8, которая с выхода измерителя угловых координат 14 поступает на второй вход монитора 8. Первый выход порогового устройства 13 соединен со вторым входом блока расчета дальности 15. В случае отсутствия сигнала от световозвращающего объекта пороговое устройство 13 передает информацию об этом через первый выход на второй вход блока расчета дальности 15, где в этом случае не рассчитывается дальность L, а формируется импульс длительностью Ту0-ΔTy(n-l), при этом величина n поступает на первый вход блока расчета дальности с выхода счетчика кадров 9. Импульс длительностью Ту0-ΔTy(n-1) со второго выхода блока расчета дальности 15 передается на первый вход блока формирования времени упреждения Туп, на второй вход которого поступает информация о начале периода накопления Тн со второго выхода ФПЗС-матрицы 4. Зная Тн и Туп, блок формирования времени упреждения Туп 16 формирует импульс длительностью Тн-[Ту0-ΔTy(n-1)] относительно начала времени накопления Тн ФПЗС-матрицы 4. С выхода блока формирования времени упреждения Туп 16 сигнал упреждения поступает на вход драйвера лазера 17, выход которого соединен с лазером, что обеспечивает управление включением лазера с необходимым упреждением Тн-[Ту0-ΔTy(n-1)] в момент четного полукадра. Драйвер лазера 17, получив этот управляющий импульс, осуществляет запуск полупроводникового лазера 1 для подсвета лоцируемого световозвращающего объекта 7.
При наличии отраженного сигнала от световозвращающего объекта 7 (см. фиг.3a) на вход порогового устройства 13 с выхода сумматора 12 приходит импульс вида, показанного на фиг.3в.
В случае определения сигнала пороговым устройством 13 (если его величина превышает порог) в некотором кадре n=n* в блоке расчета дальности 15 формируется импульс длительностью Ту0-ΔTy(n*-1), и все последующие кадры подсвечиваются с упреждением, определенным для n*-го кадра. Далее в блоке 15 рассчитывается дальность по формуле:
Lоб=[Ty0-ΔTy(n*-1)]c/2,
где c - скорость света;
Ty0=2Lmax/c;
Lmax - максимальная дальность, измеряемая устройством;
ΔTy=ΔL/c;
ΔL - погрешность измерения расстояния до световозвращающего объекта;
n* - номер кадра, в котором появился отраженный сигнал.
Информация о дальности Lоб до световозвращающего объекта 7 с первого выхода блока расчета дальности 15 передается для отображения на третий вход монитора 8.
Следует отметить, что для реализации описанного метода обычные видеокамеры не подходят, т.к. не позволяют точно определять начало периода накопления Тн, поэтому для решения описанной задачи требуется ФПЗС-камера, у которой выводится строб начала периода накопления Тн.
Таким образом, при условии достаточного количества итераций погрешность определения расстояния ΔL будет ограничена шириной импульса подсвета tи:
 ,
,
поскольку ΔТу формально можно уменьшать до величины Lmax/m, где
Lmax - максимальная дальность, измеряемая устройством;
m - количество итераций, равное количеству кадров n.
Современные лазеры способны обеспечить tи порядка 50 нс, что дает разрешение по дальности 7,5 метров.
Таким образом, предлагаемое одноканальное устройство для обнаружения световозвращающих оптических систем и определения дальности до них обеспечивает определение угловых координат положения световозвращающего объекта и дальности до него с использованием единственного приемного канала на основе ФПЗС-матрицы за счет фазовой манипуляции импульсами подсвета и обработки амплитуды отраженного от цели сигнала и без требования высокоточного наведения на световозвращатель. При этом обеспечивается возможность определения дальности до всех объектов, попадающих в поле зрения ФПЗС-матрицы без дополнительных устройств и средств наведения, упрощение конструкции, уменьшение требований к точности наведения на цель и уменьшение количества согласующих электронных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НОЧНОГО И/ИЛИ ДНЕВНОГО НАБЛЮДЕНИЯ УДАЛЕННОГО ОБЪЕКТА С СИНХРОННОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ ЛАЗЕРНЫМИ ИМПУЛЬСАМИ ПОДСВЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2269804C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ СВЕТОВОЗВРАЩАЮЩИХ СИСТЕМ | 2003 |
|
RU2230346C1 |
| Система лазерной засветки | 2023 |
|
RU2805780C1 |
| Система машинного зрения с электромагнитным отклонением луча | 2019 |
|
RU2719424C1 |
| Система машинного зрения с механическим отклонением луча | 2019 |
|
RU2720441C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СИСТЕМ СКРЫТОГО ВИДЕОНАБЛЮДЕНИЯ | 2006 |
|
RU2308746C1 |
| ЛАЗЕРНЫЙ ПРИБОР РАЗВЕДКИ | 2020 |
|
RU2755587C1 |
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
| АКТИВНО-ИМПУЛЬСНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА | 2008 |
|
RU2406100C2 |
| СТРОБИРУЕМАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА С ИМПУЛЬСНЫМ ИСТОЧНИКОМ ПОДСВЕТА | 2014 |
|
RU2597889C2 |
Изобретение относится к области оптического приборостроения, в частности к лазерным системам, способным формировать изображение удаленных объектов как ночью, так и днем. Объект наблюдения подсвечивается лазерным излучением, а при отражении от него излучение регистрируется оптико-электронным устройством на основе многоэлементного приемника. Кроме формирования изображения объекта устройство определяет его угловые координаты и измеряет дальность. Задачей настоящего изобретения является создание одноканального по приему лазерного локационного изображающего устройства для обнаружения световозвращающих оптических систем и определения дальности до них, в котором угловые координаты положения световозвращающего объекта и дальность до него определяют с использованием единственного приемного канала на основе ФПЗС-матрицы за счет фазовой манипуляции импульсами подсвета с определенными алгоритмами обработки амплитуды отраженного от цели сигнала и без требования высокоточного наведения на световозвращатель. 3 ил.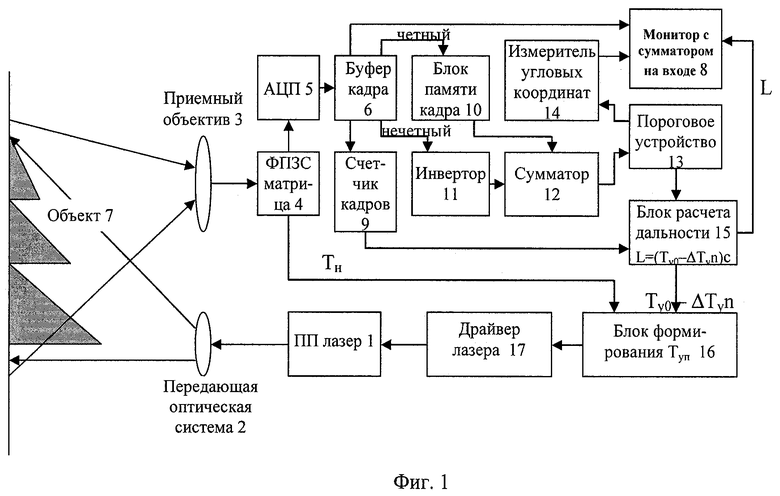
Одноканальное устройство для обнаружения световозвращающих оптических систем и определения дальности до них, содержащее приемный и передающий каналы, причем передающий канал содержит полупроводниковый лазер, вход которого соединен с выходом драйвера лазера, и передающую оптическую систему, а в приемном канале установлен приемный объектив, в фокальной плоскости которого находится ФПЗС-матрица, первый выход которой соединен со входом аналогово-цифрового преобразователя (АЦП), и монитор, отличающееся тем, что в устройство дополнительно введены буфер кадра, счетчик кадров, блок памяти кадра, инвертор, сумматор, измеритель угловых координат, пороговое устройство, блок расчета дальности, блок формирования времени упреждения Туп, причем выход АЦП соединен со входом буфера кадра, первый выход которого соединен с первым входом монитора, второй выход - со входом счетчика кадров, третий выход - со входом инвертора, а четвертый выход - со входом блока памяти кадра, выходы блока памяти кадра и инвертора соединены, соответственно, с первым и вторым входами сумматора, выход которого соединен со входом порогового устройства, выход счетчика кадров соединен с первым входом блока расчета дальности, второй вход которого соединен с первым выходом порогового устройства, первый выход блока расчета дальности соединен с третьим входом монитора, а второй - с первым входом блока формирования времени упреждения Туп, второй вход которого соединен со вторым выходом ФПЗС-матрицы, второй выход порогового устройства соединен с измерителем угловых координат, выход которого соединен со вторым входом монитора, выход блока формирования времени упреждения Туп соединен со входом драйвера лазера, при этом блок расчета дальности выполнен с возможностью вычисления дальности по формуле:
Loб=[Ty0-ΔTy(n*-1)]c/2,
где с - скорость света;
Ty0=2Lmax/с;
Lmax - максимальная дальность, измеряемая устройством;
ΔTy=ΔL/c;
ΔL - погрешность измерения расстояния до световозвращающего объекта;
n* - номер кадра, в котором появился отраженный сигнал.
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СИСТЕМ СКРЫТОГО ВИДЕОНАБЛЮДЕНИЯ | 2002 |
|
RU2191417C1 |
| и др.), 20.10.2002 | |||
| JP 2002214361 A (KOITO KOGYO КК), 31.07.2002 | |||
| WO 2008071866 A1 (CIE IND DES LASERS CILAS и др.), 19.06.2008 | |||
| DE 102005028570 A1 (DIEHL BGT DEFENCE GMBH & CO KG), 28.16.2006 | |||
| DE 10018948 A1 (LEUZE ELECTRONIC GMBH & CO), 30.11.2000. | |||

