Область техники
Изобретение относится к области ближней локации и может быть использовано в информационно-измерительных средствах и системах, работающих в режимах активного распознавания целей с блестящими точками на фоне широкополосных и распределенных в пространстве помех, а также в условиях работы ретрансляторов, имитирующих сигнал, отраженный от цели.
Уровень техники
Существующие в настоящее время автономные информационные системы (АИС) ближней локации (БЛ) с модуляцией по периодическому закону обладают существенным недостатком, выражающимся в пространственной периодичности функции чувствительности по дальности. Периодичность функции чувствительности приводит к тому, что постановка активных или пассивных помех с расстояний, превышающих рабочую дальность АИС, снижает отношение сигнал/шум на входе тракта принятия решения и может вызывать ложные срабатывания АИС. Также существует проблема неинвариантности работы существующих АИС БЛ по отношению к амплитуде принятого сигнала (см. В.К.Хохлов. Обнаружение, распознавание и пеленгация объектов в ближней локации. М., МГТУ им. Н.Э.Баумана, 2005 г., стр.291).
Наиболее близким по технической сущности к разрабатываемому устройству является система ближней радиолокации (СБРЛ) с частотной модуляцией (ЧМ) и спектральной обработкой (Коган И.М. Ближняя радиолокация (теоретические основы). - М., Советское радио, 1973. - 272 с., с.60), выбранная за прототип. АИС БЛ содержит передающую часть, состоящую из частотного модулятора, генератора, передающей антенны, и приемную часть АИС БЛ, состоящую из приемной антенны, малошумящего усилителя, смесителя, N каналов спектральной обработки и анализатора сигналов (АС), реализующего совместную обработку сигналов. Каждый канал спектральной обработки состоит из умножителя частоты, усилителя-фильтра гармоник, детектора-усилителя допплеровской частоты; частотный модулятор осуществляет модуляцию периодическим сигналом. АС определяет дальность до объекта, вычисляя соотношения амплитуд сигналов на выходах доплеровских каналов.
Недостатком данного устройства является периодичность функции чувствительности по дальности и, как следствие, низкая помехоустойчивость. Наиболее опасными являются активные помехи от мощных ретрансляционных станций, которые переизлучают принятый сигнал в направлении АИС, имитируя сигнал от цели. Также опасны пассивные помехи, находящиеся за пределами рабочей дальности при работе по слабоконтрастным целям с блестящими точками. Поэтому для обеспечения требуемой помехоустойчивости при работе по целям с блестящими точками необходимо формирование функции чувствительности, равной нулю за пределами рабочей дальности АИС.
Раскрытие изобретения
Сущностью изобретения является система ближней локации для обнаружения и распознавания объектов ближней локации с непрерывным излучением радиосигнала с ЧМ по периодическому и шумовому процессам и обработкой доплеровского сигнала по относительной ширине полосы энергетического спектра.
Техническим задачей, решаемой в предлагаемом изобретении, является повышение помехоустойчивости при работе по целям с блестящими точками за пределами рабочей дальности при наличии фона широкополосных и распределенных в пространстве помех, а также в условиях работы ретрансляторов, имитирующих сигнал, отраженный от цели. Также достигается инвариантность работы АИС по отношению к уровню сигнала.
Поставленная задача решается за счет активного распознавания целей с блестящими точками по относительной ширине полосы доплеровского сигнала.
Для ее реализации система ближней локации для обнаружения объектов, содержащая передающую часть, включающую частотный модулятор, генератор несущей частоты, передающую антенну, приемную часть, состоящую из соединенных последовательно приемной антенны, малошумящего усилителя и смесителя, многоканальную систему спектральной обработки, каждый из каналов которой содержит соединенные последовательно умножитель частоты, полосовой фильтр, фильтр-усилитель доплеровской частоты, блок обработки сигнала, соединенный с выходным устройством, дополнена в передающей части системы генератором шума, сумматором, усилителем и ответвителем, при этом выходы генератора шума и частотного модулятора соединяют с входом сумматора, выход которого связан с выход которого связан с входом генератора несущей частоты, выход последнего соединен через ответвитель со смесителем приемной части системы, второй выход ответвителя соединен с входом усилителя передающей части системы, каналы спектральной обработки приемной части дополнены в каждом канале смесителями и инерционными детекторами, причем полосовой фильтр, смеситель, фильтр-усилитель сигнала доплеровской частоты соединены последовательно, при этом выход умножителя частоты соединен со вторым входом смесителя, а выход фильтра-усилителя сигнала доплеровской частоты соединен с входом инерционного детектора и с входом блока обработки сигнала, выполненным в виде блока обработки по относительной ширине полосы энергетического спектра доплеровского сигнала, также в систему введены сумматор, пороговые устройства, схема ИЛИ и схема И, выход которой выведен к выходному устройству, причем выходы инерционных детекторов соединены с входами сумматора, выход которого через пороговое устройство соединен с одним из входов схемы И, выходы блоков обработки каждого канала многоканальной системы спектральной обработки соединены через пороговые устройства со схемой ИЛИ, выход которой соединен с другим входом системы И.
Блок обработки сигналов по относительной ширине полосы энергетического сигнала доплеровского сигнала может быть выполнен в виде двух идентичных каналов для обработки положительных и отрицательных полупериодов, подключенных параллельно, каждый из которых содержит компаратор, первый и второй блоки управления, формирователь импульсов, реверсивный накопитель, общий генератор, выходы которого соединены со входами реверсивных накопителей каждого канала, нуль-орган, сумматор ошибки, сумматор, вычитающее устройство, накопитель, выход которого соединен со входом каждого порогового устройства многоканальной системы спектральной обработки, при этом выход компаратора соединен с первыми входами блоков управления, и формирователя импульсов, второй вход первого блока управления соединен с выходом нуль-органа, первый выход первого блока управления связан со вторым входом второго блока управления, выход последнего связан с положительным входом реверсивного накопителя, выход которого через нуль-орган соединен с первым входом сумматора ошибки, второй выход первого блока управления связан со вторым входом формирования импульсов, и с отрицательным входом реверсивного накопителя, а выход формирователя импульсов соединен со вторым входом сумматора ошибки, при этом выходы компараторов обоих каналов соединены со вторым входом сумматора, выходы общего генератора соединены с третьим входом реверсивного накопителя, выходы сумматора ошибки и сумматора соединены со входами вычитающего устройства, выход которого соединен со входом накопителя. Изобретение поясняется чертежами, где на
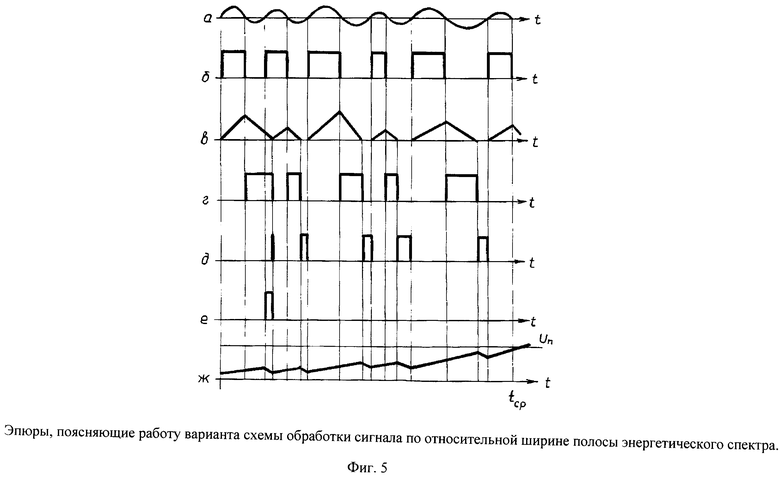
фиг.1 - структурная схема системы ближней локации для обнаружения объектов;
фиг.2 - график зависимости относительной ширины полосы энергетического спектра доплеровского сигнала от задержки прихода зондирующего сигнала при комбинированной ЧМ;
фиг.3 - график зависимости коэффициента начальной регрессии интервалов между нулями доплеровского сигнала от относительной ширины его полосы; для сигнала с гауссовым спектром и для сигнала с прямоугольным спектром;
фиг.4 - выполнение схемы обработки сигнала по относительной ширине полосы энергетического спектра;
фиг.5 - эпюры, поясняющие работу схемы обработки сигнала по относительной ширине полосы энергетического спектра.
Осуществление изобретения
Система ближней локации обнаружения объектов содержит частотный модулятор в виде генератора 1 периодического закона частотной модуляции (ЧМ), генератор 2 шума, генератор 3 частоты повторения модуляции, сумматор 4, управляемый генератор несущей частоты 5; направленный ответвитель 6, усилитель 7 мощности, передающую антенну 8, приемную антенну 9, малошумящий усилитель 10, смеситель 11, многоканальную систему спектральной обработки, каждый канал которой содержит умножитель частоты 12 (позиции 12.1…12.N), полосовой фильтр 13 (позиции 13.1…13.М), смеситель 14 (позиции 14.1…14.N) и фильтр-усилитель 15 сигнала доплеровской частоты (позиции 15.1…15.N), инерционный детектор 16 (позиции 16.1…16.N), схему обработки 17 по относительной ширине полосы энергетического спектра доплеровского сигнала (позиции 17.1…17.N), пороговое устройство 18 (позиции 18.1…18.N), схему ИЛИ 19, сумматор 20, пороговое устройство 21 и схему И 22.
Количество каналов в устройстве определяется диапазоном фиксируемых дальностей и разрешающей способностью устройства по дальности. Как известно, разрешающая способность по дальности устройств с пилообразной ЧМ зависит от девиации частоты:

где R - разрешающая способность по дальности; с - скорость света; Δf - девиация частоты.
Например, для того чтобы производить фиксацию дальностей 3, 6 и 9 метров с точностью в 1 м требуется трехканальная система с девиацией частоты пилообразной ЧМ в 150 МГц, с каналами, настроенными соответственно на 3, 6 и 9 гармоники сигнала разностной частоты, получаемого со смесителя 11.
Сигнал на выходе смесителя 11 представляет собой набор гармоник с частотами, кратными частоте повторения пилообразной ЧМ и сдвинутыми за счет доплеровской добавки. В каждом канале частоты Доплера из этого сигнала при помощи фильтра 13 выделяется соответствующая номеру канала гармоника, и полученный сигнал претерпевает второе преобразование частоты на смесителе 14, а фильтрами-усилителями 15 частоты Доплера из него выделяется сигнал доплеровской частоты.
Результаты экспериментальных исследований показали, что в ближней локации при наличии у цели блестящих точек и использовании узких диаграмм направленности относительная полоса энергетического спектра доплеровского сигнала αц<0,3; для помехи: αп>1.
Рассмотрим вопрос влияния девиации частоты шумовой ЧМ на относительную ширину полосы энергетического спектра доплеровского сигнала. Пусть шумовая доля модуляции описывается случайным процессом ξ(t). Тогда, при условии

где ωmax - максимальная частота спектра модулирующей функции ξ(t); Δωξ - девиация частоты шумового процесса; шумовая ЧМ является широкополосной, и спектр Sξ(ω) модулированного колебания описывается функцией Гаусса:

где ω0 - несущая частота.
Рассмотрим ложный сигнал, принятый от ретранслятора, работающего за пределами рабочей дальности. Частота Доплера ωд в таком сигнале определяется выражением:

где  - время задержки принимаемого сигнала; R0 - расстояние до ретранслятора; ΔR - изменение расстояния до ретранслятора за время τ.
- время задержки принимаемого сигнала; R0 - расстояние до ретранслятора; ΔR - изменение расстояния до ретранслятора за время τ.
Относительная ширина полосы энергетического спектра доплеровского сигнала, определяемая как  (где Δωд - эффективная ширина полосы спектра доплеровского сигнала), определяется выражением:
(где Δωд - эффективная ширина полосы спектра доплеровского сигнала), определяется выражением:

Bд(0) - значение корреляционной функции сигнала Доплера при нулевом аргументе, максимальное значение спектра сигнала Доплера, Sд - спектр сигнала Доплера, ωmin, ωmax - соответственно минимальная и максимальная частоты спектра сигнала Доплера.
Зависимость относительной ширины полосы энергетического спектра α доплеровского сигнала от девиации частоты шумовой ЧМ  и времени задержки τ0 приведена на фиг.2. Расчеты проводились для диапазона доплеровских частот Δfд=5…100 кГц. Анализ графиков показывает резкое увеличение значений относительной ширины полосы α при постоянной девиации шумовой ЧМ Δfξ и изменении дальности до ретранслятора R0, начиная со значений
и времени задержки τ0 приведена на фиг.2. Расчеты проводились для диапазона доплеровских частот Δfд=5…100 кГц. Анализ графиков показывает резкое увеличение значений относительной ширины полосы α при постоянной девиации шумовой ЧМ Δfξ и изменении дальности до ретранслятора R0, начиная со значений

Следовательно, при выборе полосы шумового процесса в соответствии с (6) существует возможность формирования функции чувствительности, обеспечивающей селекцию помехи по относительной ширине полосы энергетического спектра. Выполнение схемы обработки сигнала энергетического спектра в виде регрессионного или нейросетевого трактов распознавания сигналов доплеровского сигнала по относительной ширине полосы энергетического спектра входной реализации позволяет обнаруживать узкополосный (αц<0,3) доплеровский сигнал на фоне широкополосной помехи  до отношений сигнал/помеха в полосе Доплера, равных единице. Регрессионные системы обеспечивают инвариантность рабочих характеристик к средней частоте энергетического спектра и дисперсии процессов на входе, не требуют времени на адаптацию (на слежение за задержкой сигнала), позволяют сократить время на обработку и обрабатывать нестационарные случайные процессы. Помеха на частоте Доплера произвольной мощности при относительной ширине полосы α≥1 не вызывает ложных срабатываний в системе при обработке не менее 20 интервалов между нулями входной реализации.
до отношений сигнал/помеха в полосе Доплера, равных единице. Регрессионные системы обеспечивают инвариантность рабочих характеристик к средней частоте энергетического спектра и дисперсии процессов на входе, не требуют времени на адаптацию (на слежение за задержкой сигнала), позволяют сократить время на обработку и обрабатывать нестационарные случайные процессы. Помеха на частоте Доплера произвольной мощности при относительной ширине полосы α≥1 не вызывает ложных срабатываний в системе при обработке не менее 20 интервалов между нулями входной реализации.
Задаваясь пороговым значением по относительной полосе αn=0,3, на основании требований обеспечения помехоустойчивости АИС в пределах рабочих дальностей, при работе на фоне распределенных пространственных и ретрансляционных помех, из (6) и фиг.2 может быть определено значение девиации частоты шумовой ЧМ. Преимуществом предлагаемого способа формирования функции селекции (ФС) является малая девиация шумовой ЧМ (для рабочих дальностей от 0 до 15 метров Δfξ=5 мГц), что не вызывает дополнительного возрастания сигналов паразитной амплитудной модуляции.
Дальнейшая обработка в каналах сигнала Доплера происходит следующим образом. Доплеровский сигнал поступает на вход схемы 17 обработки по относительной ширине полосы, производящей оценку коэффициента начальной регрессии интервалов между нулями входного сигнала; пороговое устройство 18 сравнивает величину коэффициента начальной регрессии интервалов между нулями с заданным порогом; при превышении порогового уровня пороговое устройство 18 выдает положительный уровень на вход схемы ИЛИ 19, с выхода которой положительный сигнал пройдет на выходное устройство только в случае превышения сигналом порогового уровня на входе устройства 21. Принятие решения о достаточности энергии сигнала производится при помощи инерционных детекторов 16, вычисляющих величину сигнала в каждом канале сигнала Доплера и передающих ее на входы сумматора 20. Выход последнего сравнивается с порогом в устройстве 21, выход которого запрещает или разрешает прохождения сигнала обнаружения с выхода схемы И 22 на выходное устройство.
Таким образом, как только на входе какого-либо (n-го) канала анализатора появится доплеровский сигнал, относительная ширина полосы которого такова, что коэффициент регрессии интервалов между нулями будет достаточно велик, то пороговое устройство n-го канала даст на своем выходе единичный логический уровень. Полученный логический уровень может поступить на выходное устройство только в случае срабатывания энергетического канала (16, 20, 21).
В качестве информации об относительной ширине полосы энергетического спектра можно использовать величину коэффициента начальной регрессии интервалов между нулями сигнала Доплера [1]. На фиг.3 изображены графики зависимости величины коэффициента начальной регрессии интервалов между нулями и относительной шириной полосы энергетического спектра для гауссова и прямоугольного спектров. Видно, что с ростом относительной ширины полосы коэффициент начальной регрессии уменьшается по закону, близкому к линейному.
В качестве варианта реализации схемы 17 обработки по относительной ширине полосы энергетического спектра доплеровского сигнала предлагается схема, в функциональном виде изображенная на фиг.4. Эпюры, поясняющие ее работу, изображены на фиг.5.
Схема 17 обработки сигнала по относительной ширине полосы энергетического спектра доплеровского сигнала состоит из двух одинаковых каналов, работающих поочередно для обработки положительных и отрицательных полупериодов. Каждый канал содержит компаратор 23, (позиции 23.1 и 23.2) блоки управления 24 (позиции 24.1 и 24.2) 25 (позиции 25.1 и 25.2), формирователь импульсов 26 (позиции 26.1 и 26.2), общий генератор 27, выходы которого соединены с входами реверсивных накопителей 28 (позиции 28.1 и 28.2) каждого канала, нуль-орган 29 (позиции 29.1 и 29.2), сумматор ошибки 30, сумматор 31, вычитающее устройство 32, накопитель 33, выход которого соединен со входом порогового устройства 18.
На выходе компаратора 23 происходит функциональное преобразование вида:
где x(t) - входной сигнал компаратора; U0 - амплитуда сигнала на выходе компаратора; UП0 - порог срабатывания компаратора (фиг.5, б).
При 



Второй канал схемы работает аналогично, но по отрицательным полупериодам входного сигнала.
С выходов компараторов 23.1, и 23.2 через сумматор 31 на вход вычитающего устройства 32 поступает единичный сигнал 1(t).
Сигналы последовательно поступают на накопитель 33, который соединен со входом порогового устройства 18, выдает результирующий положительный уровень на вход схемы ИЛИ 19.
Таким образом повышена защита АИС от ложных срабатываний по искусственным и естественным широкополосным и распределенным в пространстве помехам.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2230338C2 |
| РАДИОЛОКАЦИОННЫЙ ФИКСАТОР ДАЛЬНОСТИ С КОМБИНИРОВАННОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ И ПРЕДЕЛЬНОЙ РЕГРЕССИОННОЙ ОБРАБОТКОЙ | 2012 |
|
RU2508557C1 |
| НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ | 2013 |
|
RU2513719C1 |
| РАДИОЛОКАЦИОННЫЙ ДАТЧИК СКОРОСТИ СБЛИЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА С ПРЕПЯТСТВИЕМ | 2013 |
|
RU2543493C1 |
| РАДИОЛОКАЦИОННЫЙ ПЕЛЕНГАТОР ЛОКАЛИЗОВАННЫХ ОБЪЕКТОВ | 2014 |
|
RU2580830C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ КРЫЛАТЫХ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2009 |
|
RU2422852C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
Изобретение относится к области ближней локации и может быть использовано в информационно-измерительных средствах и системах, работающих в режимах активного распознавания слабоконтрастных целей с блестящими точками на фоне широкополосных и распределенных в пространстве помех, а также в условиях работы ретрансляторов, имитирующих сигнал, отраженный от цели. Достигаемый технический результат - повышение помехоустойчивости. Указанный результат достигается наличием в предложенном устройстве - радиолокационном обнаружителе - генератора шума, сигнал которого складывается с пилообразным модулирующим сигналом, и устройства обработки по относительной ширине полосы энергетического спектра доплеровского сигнала в качестве анализатора, которое обеспечивает распознавание цели с блестящими точками от распределенной в пространстве помехи, а также обеспечивает резкую отсечку функции чувствительности за пределами рабочей дальности и инвариантность работы автономной информационной системы по отношению к амплитуде принимаемого сигнала в пределах рабочей дальности. 1 з.п. ф-лы, 5 ил.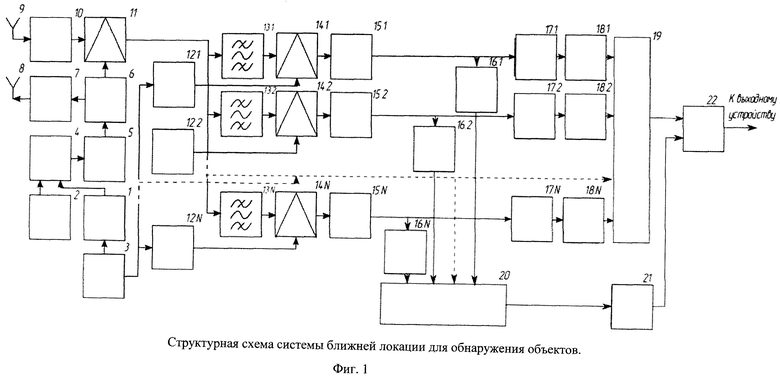
1. Система ближней локации для обнаружения объектов, содержащая передающую часть, включающую частотный модулятор, генератор несущей частоты, передающую антенну, приемную часть, состоящую из соединенных последовательно приемной антенны, малошумящего усилителя и смесителя, многоканальную систему спектральной обработки, каждый из каналов которой содержит умножитель частоты, полосовой фильтр, фильтр-усилитель сигнала доплеровской частоты, блок обработки сигнала, отличающаяся тем, что в передающую часть системы введены генератор шума, сумматор, усилитель и ответвитель, при этом выходы генератора шума и частотного модулятора соединены с входом сумматора, выход которого связан с входом генератора несущей частоты, выход последнего соединен через ответвитель со смесителем приемной части системы, второй выход ответвителя соединен с входом усилителя передающей части системы, каналы спектральной обработки приемной части дополнены в каждом канале смесителями и инерционными детекторами, причем полосовой фильтр, смеситель, фильтр-усилитель сигнала доплеровской частоты соединены последовательно, при этом выход умножителя частоты соединен со вторым входом смесителя, а выход фильтра-усилителя сигнала доплеровской частоты соединен с входом инерционного детектора и с входом блока обработки сигнала, выполненным в виде блока обработки по относительной ширине полосы энергетического спектра доплеровского сигнала, также в систему введены сумматор, пороговые устройства, схема ИЛИ и схема И, выход которой выведен к выходному устройству, причем выходы инерционных детекторов соединены с входами сумматора, выход которого через пороговое устройство соединен с одним из входов схемы И, выходы блоков обработки каждого канала многоканальной системы спектральной обработки соединены через пороговые устройства со схемой ИЛИ, выход которой соединен с другим входом системы И.
2. Система ближней локации для обнаружения объектов по п.1, отличающаяся тем, что блок обработки сигналов по относительной ширине полосы энергетического спектра доплеровского сигнала выполнен в виде двух идентичных каналов для обработки положительных и отрицательных полупериодов входного сигнала, подключенных параллельно, каждый из которых содержит компаратор, первый и второй блоки управления, формирователь импульсов, реверсивный накопитель и нуль-орган, блок обработки содержит также генератор, выходы которого соединены с входами реверсивных накопителей каждого канала, сумматор ошибки, сумматор, вычитающее устройство, накопитель, выход которого соединен с входом порогового устройства многоканальной системы спектральной обработки, при этом выход компаратора соединен с первыми входами первого и второго блоков управления, и формирователя импульсов, второй вход первого блока управления соединен с выходом нуль-органа, первый выход первого блока управления связан со вторым входом второго блока управления, выход последнего связан с положительным входом реверсивного накопителя, выход которого через нуль-орган соединен с первым входом сумматора ошибки, второй выход первого блока управления связан со вторым входом формирователя импульсов, и с отрицательным входом реверсивного накопителя, а выход формирователя импульсов соединен с вторым входом сумматора ошибки, при этом выходы компараторов обоих каналов соединены со вторым входом сумматора, выходы генератора соединены с третьим входом реверсивного накопителя, выходы сумматора ошибки и сумматора соединены с входами вычитающего устройства, выход которого соединен со входом накопителя.
| КОГАН И.М.Ближняя радиолокация (теоретические основы) | |||
| Москва, Советское радио, 1973,с.60 | |||
| УСТАНОВКА ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ РАБОТЫ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2009 |
|
RU2429545C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| US 5999119 A, 07.12.1999 | |||
| US 7786927 B2, 31.08.2010 | |||
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА ХИМИКО-ТЕРМИЧЕСКОЙ ОБРАБОТКИ СТАЛЕЙ И СПЛАВОВ В ТЛЕЮЩЕМ РАЗРЯДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1995 |
|
RU2084555C1 |
| US 6587074 B1, 01.07.2003 | |||

