Изобретение относится к области промыслово-геофизических исследований глубоких и сверхглубоких нефтегазовых скважин и предназначено для контроля технического состояния обсадных колонн в скважинах.
Известен способ исследования профиля внутренней поверхности обсадных колонн с буровым раствором в скважине прибором радиусного метода контроля зазоров между внутренней поверхностью колонны и наружной поверхностью защитного кожуха вращающегося датчика прибора с двумя присоединенными к измерительной схеме идентичными по параметрам основным и вспомогательным трансформаторными преобразователями с полюсными наконечниками, обращенными к стенке кожуха. Этот способ впервые использованный в профилографе ЭПОК-1 (Шоц М.Б. Электромагнитный профилограф обсадных колонн ЭПОК-1. Информационный листок (межотраслевая информация) №43-76, серия 08-12. ВНИИОЭНГ, 1976. Исследование и внедрение методов и средств повышения надежности и долговечности обсадных колонн, Андрианов И.И., Козырев Ю.С., Павлов А.И. и др. - В кн.: Бурение, испытание и освоение глубоких скважин на Северном Кавказе, в Дагестане и Грузии, 1976, с.63-68. Труды СевКавНИПИнефть) по авт.свид. СССР №261318 (опубл. 04.09.72) [патенты: США №3727126, Франции №2108800 и ФРГ №2046733], предназначенном преимущественно для определения профиля внутренней поверхности и желобного износа обсадных колонн, предусматривает в процессе контроля технического состояния обсаженных скважин шунтирование полюсных наконечников вспомогательного (или иначе компенсационного) трансформаторного преобразователя ферромагнитным телом в виде пластины, размещаемой внутри кожуха. Такая реализация способа не обеспечивает необходимой точности измерений в условиях глубоких и сверхглубоких скважин из-за невозможности учета влияния внешних дестабилизирующих факторов (температуры, давления, магнитной проницаемости бурового раствора и др.) на результаты исследований. Это снижает точность определения сминающих и критических внутренних давлений изношенных обсадных труб, а также приводит к недостоверным расчетам страгивающих нагрузок на изношенные муфтовые соединения.
Известен также способ исследования обсадных колонн в скважине по авт.свид. СССР №1286758 (заявл. 17.04.85), обеспечивающий выявление желобообразных выработок и степени износа обсадных труб бурильным инструментом путем использования вспомогательного трансформаторного преобразователя датчика в режиме второго измерительного преобразователя, аналогичного основному, при диаметрально противоположной их установке внутри кожуха. Этот способ также не позволяет получить высокую точность измерений из-за нестабильности параметров преобразователей при изменении температуры окружающей среды. Другим его недостатком является привнесение в результаты определения внутреннего диаметра обсадных колонн дополнительной погрешности при наличии у преобразователей погрешностей одного знака.
Основным общим недостатком указанных способов является зависимость результатов исследования технического состояния обсадных колонн от изменения магнитной проницаемости рабочей среды. Это вынуждает градуировку преобразователей осуществлять в буровом растворе, извлеченном из скважины на устье непосредственно перед проведением ее исследования. Однако такая операция не позволяет обеспечить необходимой точности определения геометрических характеристик внутренней поверхности обсадных колонн, так как магнитные свойства бурового раствора не являются неизменными как во времени, так и по глубине ствола скважины вследствие воздействия температуры, количества, состава и скорости осаждения примесей.
Наиболее близким к предлагаемому является способ исследования внутренней поверхности обсадных колонн, заключающийся в том, что в каждой профилографируемой точке исследуемого профиля производят измерение выходных напряжений основного преобразователя, вычитают из них выходные напряжения вспомогательного преобразователя с последующей регистрацией и обработкой получаемых текущих разностных напряжений (Абрамов А.А., Измайлов Л.Б., Климов В.В. Разработка устройства для определения износа обсадных колонн в процессе бурения скважин. Отчет о НИР. УДК 622.248.56.05, № 0284.0056650, 1984, с.55-64). Этот способ предусматривает размещение основного и вспомогательного преобразователей один над другим вдоль оси скважинного прибора с ориентацией полюсных наконечников в одну сторону и радиальным смещением их рабочих поверхностей относительно друг друга. При этом полюсные наконечники основного преобразователя служат для определения зазоров между ними и внутренней поверхностью обсадной колонны, находясь на наименьшем расстоянии от ее образующей по сравнению с полюсными наконечниками вспомогательного преобразователя. Благодаря этому при разностном выделении полезного сигнала расчетным путем устраняется не только влияние нестабильности характеристик преобразователей и элементов конструкции обсадных колонн при изменении температуры бурового раствора, но и исключается влияние изменения магнитной проницаемости последнего на результаты измерений. Однако при всех очевидных достоинствах этот способ имеет и ряд серьезных недостатков, существенно ограничивающих с метрологической точки зрения его применение в аппаратуре для исследования обсадных колонн в глубоких и сверхглубоких скважинах. С одной стороны это объясняется тем, что в реальных условиях образующая внутренней поверхности обсадной колонны, относительно которой в двух разнесенных по глубине точках производятся измерения зазоров чаще всего из-за плохого качества центрирования скважинного прибора не является строго параллельной плоскостям рабочих поверхностей полюсных наконечников основного и вспомогательного преобразователей. Наиболее значительно этот фактор проявляет себя на концах желобообразных выработок. По этим причинам в результаты измерений будет вноситься дополнительная погрешность, прямо пропорциональная расстоянию между нейтралями сердечников основного и вспомогательного преобразователей. Очевидно, что для минимизации указанной погрешности нейтрали сердечников преобразователей должны располагаться в единой поперечной плоскости скважинного прибора, а это противоречит техническим возможностям рассматриваемого способа. С другой стороны радиальное смещение полюсных наконечников преобразователей относительно друг друга уменьшает на величину этого смещения и без того малый диапазон работы датчика, обычно не превышающий 30÷35 мм, а также снижает чувствительность вспомогательного преобразователя, что в конечном итоге сказывается на качестве исследования технического состояния обсадных колонн. Другим недостатком рассматриваемого способа является необходимость одновременного измерения выходных напряжений преобразователей с заданным по периметру шагом сканирования внутренней поверхности обсадных колонн. Это приводит к вынужденному применению электронных схем для промежуточных преобразований сигналов в скважинном приборе, что ограничивает его использование в сложных термобарических условиях глубоких и сверхглубоких скважин. И, наконец, размещение преобразователей один над другим вдоль оси скважинного прибора увеличивает его осевой габарит, что нежелательно при концевом расположении датчика под нижним центратором, так как это на участках обсадных труб с установленными пластырями ухудшает проходимость прибора на спуске в случае эксцентриситета датчика при наличии угла наклона оси его кожуха по отношению к исследуемой внутренней поверхности колонны.
Изобретением решается задача повышения точности исследования обсадных колонн в условиях глубоких и сверхглубоких нефтяных и газовых скважин.
Для достижения названного технического результата в предлагаемом способе исследования профиля внутренней поверхности обсадных колонн с буровым раствором в скважине прибором радиусного метода контроля зазоров между внутренней поверхностью колонны и наружной поверхностью защитного кожуха вращающегося датчика прибора с двумя присоединенными к измерительной схеме, идентичными по параметрам основным и вспомогательным трансформаторными преобразователями с полюсными наконечниками, обращенными к стенке кожуха, заключающемся в том, что в каждой профилографируемой точке исследуемого профиля производят измерение выходных напряжений основного преобразователя, вычитают из них выходные напряжения вспомогательного преобразователя с последующей регистрацией и обработкой получаемых текущих разностных напряжений, выходные напряжения вспомогательного преобразователя формируют пропорциональными магнитной проницаемости раствора путем шунтирования его полюсных наконечников ферромагнитным телом с зазором по отношению к наружной поверхности кожуха, обеспечивающим свободную циркуляцию раствора, при этом ферромагнитное тело размещают от наружной поверхности кожуха на расстоянии, не превышающем диапазона работы преобразователей, а сам вспомогательный преобразователь устанавливают на одном высотном уровне с основным.
Кроме того, в предлагаемом способе при проведении исследований осуществляют корректировку градуировочной зависимости датчика с учетом изменения магнитной проницаемости раствора, для чего производят кратковременное магнитное шунтирование полюсных наконечников основного преобразователя и формируют соответствующее нулевому зазору между внутренней поверхностью колонны и наружной поверхностью кожуха опорное разностное напряжение, а контролируемые зазоры, соответствующие каждой профилографируемой i-й точке исследуемого j-го профиля, определяют по формуле
где а - расстояние от полюсных наконечников преобразователей до наружной поверхности кожуха;
в - расстояние от наружной поверхности кожуха до встречной поверхности ферромагнитного тела, шунтирующего полюсные наконечники вспомогательного преобразователя;
 - опорное разностное напряжение, постоянное по величине, при данном составе бурового раствора на заданной глубине для j-го исследуемого профиля;
- опорное разностное напряжение, постоянное по величине, при данном составе бурового раствора на заданной глубине для j-го исследуемого профиля;
 - выходное напряжение основного преобразователя, соответствующее нулевому зазору между внутренней поверхностью колонны и наружной поверхностью кожуха, для j-го исследуемого профиля;
- выходное напряжение основного преобразователя, соответствующее нулевому зазору между внутренней поверхностью колонны и наружной поверхностью кожуха, для j-го исследуемого профиля;
 - выходное напряжение вспомогательного преобразователя для j-го исследуемого профиля;
- выходное напряжение вспомогательного преобразователя для j-го исследуемого профиля;
j=1, 2, 3, …, № - порядковый номер исследуемого профиля;
№ - количество исследуемых профилей;
 - текущее разностное напряжение для j-го исследуемого профиля в i-ой профилографируемой точке;
- текущее разностное напряжение для j-го исследуемого профиля в i-ой профилографируемой точке;
 - текущее выходное напряжение основного преобразователя для j-го исследуемого профиля в i-й профилографируемой точке;
- текущее выходное напряжение основного преобразователя для j-го исследуемого профиля в i-й профилографируемой точке;
i=1, 2, 3, …, k - порядковый номер профилографируемой точки исследуемого профиля;
k - количество профилографируемых точек исследуемого профиля.
Причем в предлагаемом способе магнитное шунтирование основного преобразователя может быть осуществлено путем прижима кожуха к неизношенной внутренней поверхности исследуемого участка колонны.
Кроме того, магнитное шунтирование основного преобразователя может быть осуществлено с помощью устанавливаемой на приборе ферромагнитной шторки.
Кроме того, формирование опорного разностного напряжения может быть осуществлено с помощью размещаемого в приборе дополнительного преобразователя, аналогичного по параметрам первым двум, который периодически подключают к измерительной схеме взамен основного преобразователя при полюсных наконечниках, шунтированных дополнительным ферромагнитным телом с фиксированным зазором, равным расстоянию от полюсных наконечников основного и вспомогательного преобразователей до наружной поверхности кожуха.
Причем целесообразно дополнительный преобразователь устанавливать внутри кожуха на одном высотном уровне с основным и вспомогательным преобразователями, а плоскость ориентации его полюсных наконечников располагать под углом 90-135° относительно плоскостей ориентации полюсных наконечников двух остальных преобразователей.
Кроме того, целесообразно выделение текущих и опорных разностных напряжений осуществлять из выходных напряжений преобразователей, получаемых путем их двухполупериодного выпрямления.
Причем целесообразно двухполупериодное выпрямление выходных напряжений преобразователей осуществлять поочередно с помощью одного выпрямителя.
Отличительными признаками предлагаемого способа исследования внутренней поверхности обсадных колонн от указанного выше известного наиболее близкого к нему являются формирование выходных напряжений вспомогательного преобразователя, пропорциональных магнитной проницаемости бурового раствора путем шунтирования его полюсных наконечников ферромагнитным телом с зазором по отношению к наружной поверхности защитного кожуха, обеспечивающим свободную циркуляцию раствора, размещения ферромагнитного тела от наружной поверхности кожуха на расстоянии, не превышающем диапазона работы преобразователей и установке при этом вспомогательного преобразователя на одном высотном уровне с основным, а также осуществление в скважинных условиях корректировки градуировочной характеристики датчика с учетом изменения магнитной проницаемости раствора путем кратковременного магнитного шунтирования полюсных наконечников основного преобразователя и формирования при этом соответствующего нулевому зазору между внутренней поверхностью обсадной колонны и наружной поверхностью кожуха опорного разностного напряжения с последующим определением контролируемых зазоров по алгоритму (1). Другими отличительными признаками являются возможные варианты формирования опорного разностного напряжения, осуществляемые путем прижима кожуха к неизношенной внутренней поверхности исследуемого участка колонны либо с помощью устанавливаемой на скважинном приборе ферромагнитной шторки, либо с помощью размещаемого в приборе дополнительного преобразователя, аналогичного по параметрам первым двум, который периодически подключают к измерительной схеме взамен основного преобразователя при полюсных наконечниках шунтированных дополнительным ферромагнитным телом с фиксированным зазором, равным расстоянию от полюсных наконечников основного и вспомогательного преобразователей до наружной поверхности кожуха. Кроме того, отличительным признаком является обеспечение возможности установки дополнительного преобразователя внутри кожуха на одном высотном уровне с основным и вспомогательным преобразователями с ориентацией его полюсных наконечников относительно плоскостей ориентации полюсных наконечников двух последних под углом 90÷135°. Отличительными признаками, кроме того, являются выделение текущих и опорных разностных напряжений из выходных напряжений преобразователей, получаемых путем их двухполупериодного выпрямления, а также осуществление двухполупериодного выпрямления выходных напряжений преобразователей поочередно с помощью одного выпрямителя.
Предлагаемый способ поясняется чертежами, представленными на фиг.1-8.
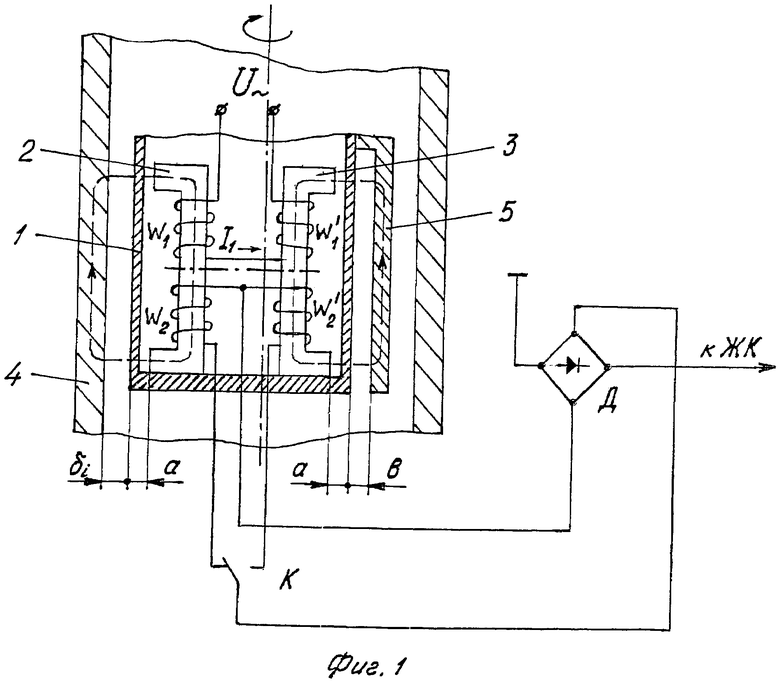
На фиг.1 показана электрокинематическая схема измерительной части скважинного профилографа для исследования внутренней поверхности обсадных колонн.
На фиг.2 - график зависимости показаний профилографа от величины контролируемых зазоров между внутренней поверхностью обсадной колонны и наружной поверхностью защитного кожуха датчика.
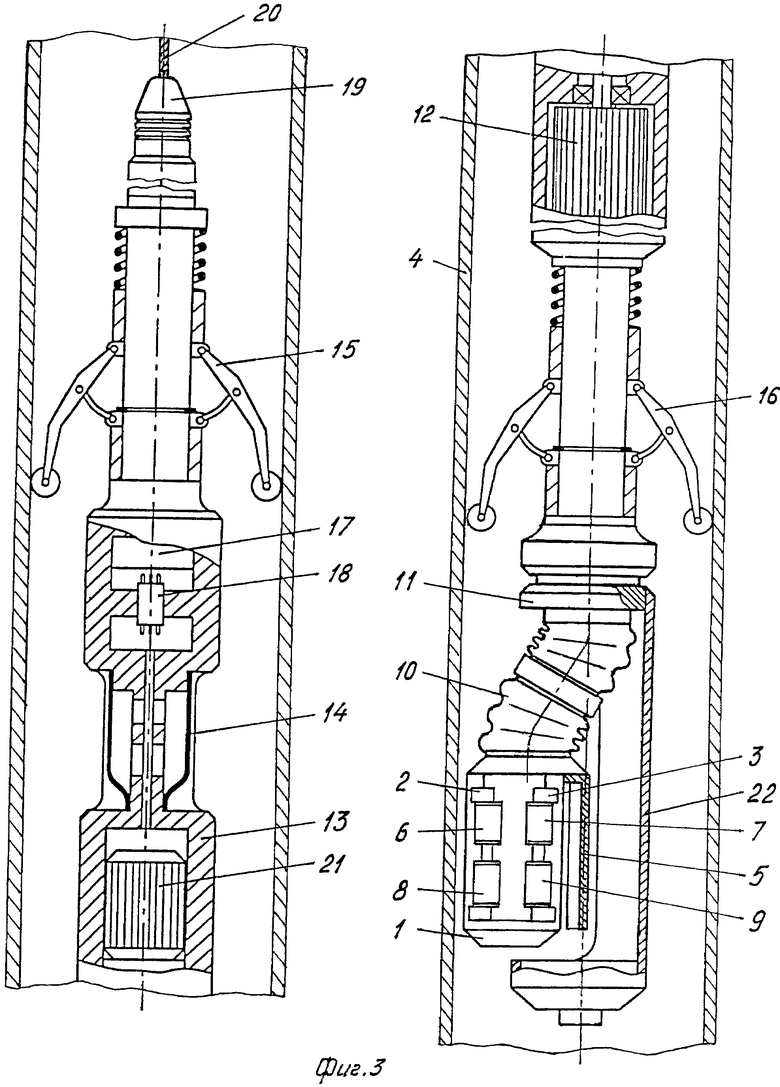
На фиг.3 представлен один из вариантов исполнения скважинного профилографа, общий вид с частичным продольным разрезом.
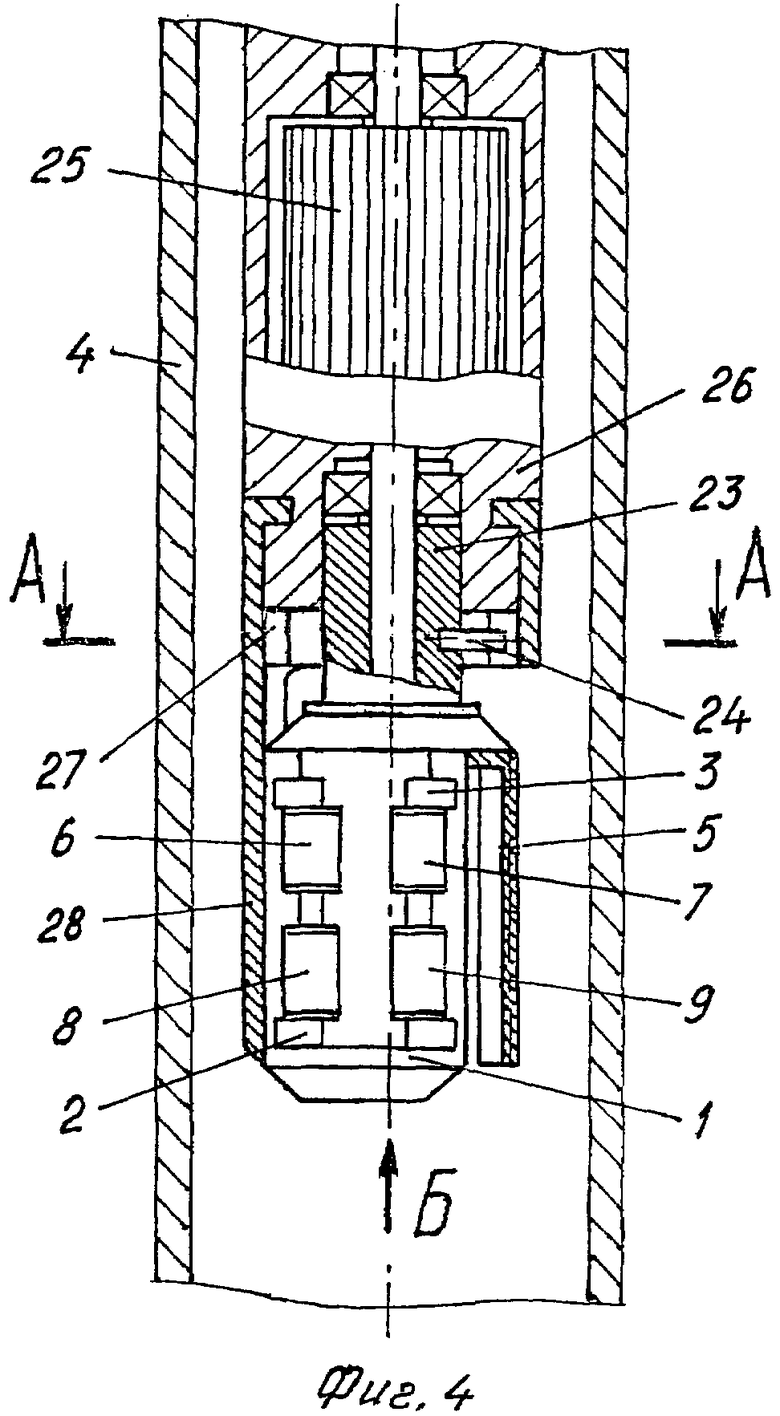
На фиг.4 - второй возможный вариант исполнения скважинного профилографа, фрагмент общего вида с частичным продольным разрезом.
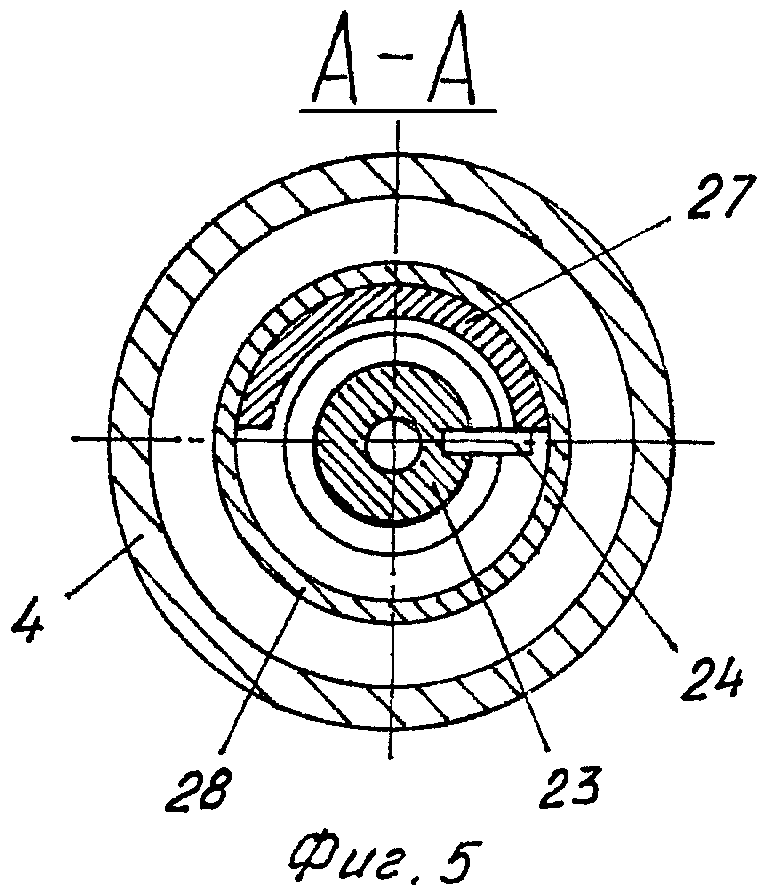
На фиг.5 - разрез А-А на фиг.4.
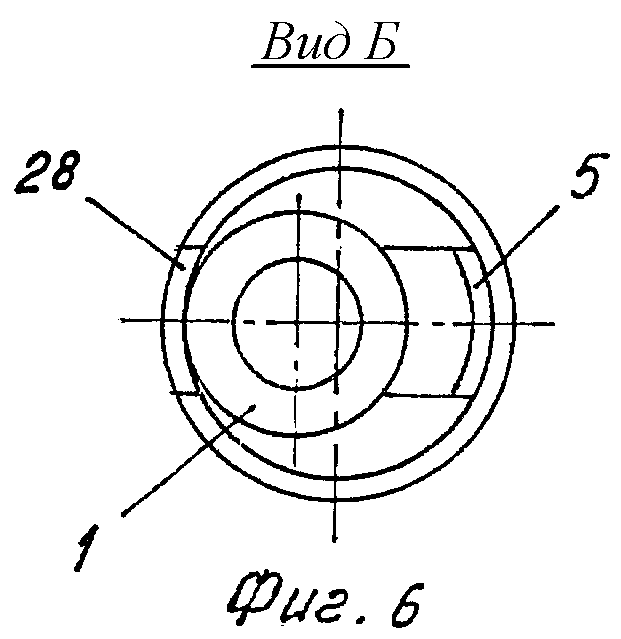
На фиг.6 - вид Б на фиг.4.
На фиг.7 - электрокинематическая схема третьего возможного варианта исполнения скважинного профилографа.
На фиг.8 изображена возможная схема установки преобразователей датчика для третьего варианта исполнения скважинного профилографа.
Сущность способа заключается в следующем.
Перед проведением исследования обсаженной скважины профилограф, выполненный в соответствии с электрокинематической схемой на фиг.1, с помощью унифицированного кабельного наконечника подсоединяют через трехжильный геофизический бронированный кабель к типовой компьютеризированной каротажной станции. После чего в наземных условиях осуществляют проверку работоспособности прибора, снятие градуировочной зависимости и ввод полученных данных в компьютер станции. При этом профилограф, как обычно, содержит компенсированный охранный корпус, центраторы, элементы управления и контроля, измерительную схему, бесконтактный датчик взаимоиндуктивного (трансформаторного) типа, заключенный в тонкостенный магнитопрозрачный защитный кожух с приводом вращения. Причем в рассматриваемом способе датчик представляет собой чувствительный модуль, составленный из двух жестко соединенных с кожухом 1 (см. фиг.1), идентичных по параметрам и электрически связанных между собой трансформаторных преобразователей, один из которых по назначению является основным 2, а другой - вспомогательным 3. Преобразователи 2 и 3 содержат П-образные сердечники из шихтованной электротехнической стали с малыми потерями на гистерезис и установлены в кожухе 1 вдоль его образующих на одном высотном уровне, т.е. при размещении нейтралей упомянутых сердечников в одной поперечной плоскости. Полюсные наконечники сердечников преобразователей 2 и 3 обращены в разные стороны и расположены от наружной поверхности кожуха 1 на одинаковых расстояниях, обычно не превышающих a=2÷3,5 мм, и образуют, таким образом, разомкнутые магнитные цепи, т.е. содержащие условно воздушные начальные зазоры a=const, обладающие, как правило, большим магнитным сопротивлением по сравнению с остальными частями цепей. С целью устранения влияния дестабилизирующих факторов на работу преобразователей 2 и 3 их обмотки возбуждения имеют одинаковое количество витков W1=W'1 и последовательно подключены к источнику U стабилизированного переменного тока I1 питания со стабилизированной частотой. Вторичные (или иначе сигнальные) обмотки преобразователей 2 и 3 также имеют равное количество витков W2=W'2 и подключены к измерительной схеме, обеспечивающей поочередную передачу их выходных напряжений, например, по одной из жил (ЖК) и оплетке (броне) геофизического кабеля на вход каротажной станции с последующим измерением, регистрацией и первичной обработкой получаемой информации, заключающейся в выделении разностных напряжений путем вычитания выходных напряжений вспомогательного преобразователя 3 из выходных напряжений основного преобразователя 2. Для осуществления этого процесса измерительная схема содержит двухпозиционный коммутатор К. Во избежание фазовых искажений и исключения помех, связанных с влиянием изменения электрических характеристик геофизического кабеля, выделение разностных напряжений целесообразно проводить на постоянном токе. Для чего в измерительную схему профилографа введен двухполупериодный диодный выпрямитель Д. При этом основной преобразователь 2 служит для определения зазоров δi между внутренней поверхностью обсадной колонны 4 (при образовании с ней замкнутой магнитной цепи) и наружной поверхностью кожуха 1. Вспомогательный преобразователь 3 зашунтирован ферромагнитным телом в виде пластинчатого экрана 5 из магнитомягкой стали с зазором в=const относительно наружной поверхности кожуха 1 и предназначен для получения выходного напряжения, пропорционального магнитной проницаемости рабочей среды в упомянутом зазоре, который по понятным соображениям не может превышать диапазона работы преобразователей 2 и 3, а с конструктивно-технологической точки зрения его выбор предпочтителен в диапазоне в=7÷15 мм. Причем сердечники преобразователей 2 и 3 имеют синфазное (однонаправленное) течение магнитных потоков, что обеспечивает взаимное отталкивание их магнитных полей друг от друга соответственно в сторону внутренней поверхности колонны 4 и экрана 5. Это позволяет установить преобразователи 2 и 3 на достаточно близком расстоянии друг от друга без экранирования и улучшить диаграмму направленности датчика при его вращении.
Исходя из разностного метода выделения полезного сигнала характеристика рассматриваемого датчика профилографа может быть представлена в следующем общем виде:

где  - коэффициент пропорциональности;
- коэффициент пропорциональности;
ω=2πf - круговая частота тока питания;
f - частота тока;
I1 - величина тока в обмотках возбуждения преобразователей;
W1 - число витков в обмотках возбуждения преобразователей;
W2 - число витков в сигнальных обмотках преобразователей;
µo - магнитная проницаемость воздуха;
µp - магнитная проницаемость рабочей среды (бурового раствора);
SB - площадь поперечного сечения воздушного зазора у полюсных наконечников преобразователей.
Характеристика (2) представляет собой зависимость  , получаемую в процессе градуировки профилографа на устье скважины в изъятом из нее буровом растворе (фиг.2). Для получения этой зависимости используют градуировочное приспособление, например, в виде имитирующей участок колонны ферромагнитной желобообразной пластины, оснащаемой электронным штангенциркулем и устанавливаемой на корпусе прибора с возможностью радиального перемещения относительно полюсных наконечников основного преобразователя 2 от точки соприкосновения с поверхностью кожуха 1 на расстояние, не превышающее диапазона его работы. Результаты градуировки заносятся в память компьютера каротажной станции и в дальнейшем используются при исследовании внутренней поверхности обсадной колонны. Причем в условиях нормальной среды (на воздухе) с µр=µо характеристика (2) примет вид:
, получаемую в процессе градуировки профилографа на устье скважины в изъятом из нее буровом растворе (фиг.2). Для получения этой зависимости используют градуировочное приспособление, например, в виде имитирующей участок колонны ферромагнитной желобообразной пластины, оснащаемой электронным штангенциркулем и устанавливаемой на корпусе прибора с возможностью радиального перемещения относительно полюсных наконечников основного преобразователя 2 от точки соприкосновения с поверхностью кожуха 1 на расстояние, не превышающее диапазона его работы. Результаты градуировки заносятся в память компьютера каротажной станции и в дальнейшем используются при исследовании внутренней поверхности обсадной колонны. Причем в условиях нормальной среды (на воздухе) с µр=µо характеристика (2) примет вид:

где .
При этом кривая (на чертеже показана пунктиром), зависимости  , отражающая характеристику (3), будет являться исходной и по форме совпадать с рабочей кривой, представленной на фиг.2, а также пересекать ось абсцисс в прежней точке, т.е. на расстоянии в от начала координат, обеспечивая при этом получение
, отражающая характеристику (3), будет являться исходной и по форме совпадать с рабочей кривой, представленной на фиг.2, а также пересекать ось абсцисс в прежней точке, т.е. на расстоянии в от начала координат, обеспечивая при этом получение  и переход к его отрицательным значениям при δi>в. Опорная точка исходной кривой, находящаяся на оси ординат при δi=0, будет располагаться ниже опорной точки рабочей кривой, а нижняя ветвь исходной кривой в области отрицательных значений
и переход к его отрицательным значениям при δi>в. Опорная точка исходной кривой, находящаяся на оси ординат при δi=0, будет располагаться ниже опорной точки рабочей кривой, а нижняя ветвь исходной кривой в области отрицательных значений  займет верхнее положение по отношению к нижней ветви рабочей кривой. Отсюда следует, что по показаниям профилографа, полученным в процессе его градуировки в рабочей среде с отличающейся магнитной проницаемостью можно построить семейство кривых, пересекающихся в одной точке на оси абсцисс и характеризующихся разным местоположением опорных точек на оси ординат с соответствующими им опорными разностными напряжениями. Очевидно, что определение этих напряжений в скважинных условиях позволит, как это показано ниже, переходить вследствие изменения магнитной проницаемости рабочей среды от одной градуировочной зависимости к другой.
займет верхнее положение по отношению к нижней ветви рабочей кривой. Отсюда следует, что по показаниям профилографа, полученным в процессе его градуировки в рабочей среде с отличающейся магнитной проницаемостью можно построить семейство кривых, пересекающихся в одной точке на оси абсцисс и характеризующихся разным местоположением опорных точек на оси ординат с соответствующими им опорными разностными напряжениями. Очевидно, что определение этих напряжений в скважинных условиях позволит, как это показано ниже, переходить вследствие изменения магнитной проницаемости рабочей среды от одной градуировочной зависимости к другой.
Несомненно, реализация предлагаемого способа с предварительным осуществлением градуировки профилографа на устье скважины в рабочей среде благодаря разностному выделению полезных сигналов и наличию при этом раствора в рабочих зазорах преобразователей 2 и 3 обеспечивает достаточно высокую точность исследования внутренней поверхности обсадных колонн с нахождением в них растворов, содержащих барит, сидерит, гематит. Однако для исследования обсаженных скважин с утяжеленными буровыми растворами, содержащими добавки магнетита и иные ферромагнитные включения, подобное использование способа является нерациональным из-за осаждения ферромагнитных частиц и различной их концентрации в растворе на разных глубинах. Кроме того, градуировка профилографа в буровом растворе на устье перед спуском в скважину снижает удобство пользования и производительность исследований.
Очевидно, что наиболее предпочтительной как с метрологической, так и с эксплутационной точек зрения является такая форма реализации предлагаемого способа, которая предусматривает возможность градуировки профилографа на заданных глубинах в обсаженной скважине непосредственно перед проведением измерений. Такая возможность возникает при нахождении алгоритма определения δij, позволяющего исключить из результатов измерений коэффициент пропорциональности А. Для этого достаточно произвести кратковременное магнитное шунтирование полюсных наконечников основного преобразователя 2 и получить соответствующее нулевому зазору (δi=0) между внутренней поверхностью колонны 4 и наружной поверхностью кожуха 1 опорное разностное напряжение в виде:

Учитывая, что для профилографа хотя бы незначительное время находящегося в неизменной рабочей среде коэффициент пропорциональности А в пределах этого времени является величиной постоянной, из выражений (2) и (4) будем иметь

Отсюда после преобразований получим предназначенный для вторичной компьютерной обработки передаваемой из обсаженной скважины полезной информации искомый алгоритм (1) определения контролируемых зазоров δij, соответствующих каждой профилографируемой i-ой точке исследуемого j-го профиля внутренней поверхности обсадной колонны.
Как следует из выражения (1), оно приемлемо для осуществления предлагаемого способа в любой реально существующей скважинной среде, так как общеизвестно, что магнитная проницаемость твердого тела (колонны, сердечников преобразователей) всегда меньше проницаемости вещества (бурового раствора). Таким образом, предлагаемый способ по определению становится универсальным и в зависимости от способа магнитного шунтирования основного преобразователя при δi=0 может быть реализован в трех вариантах исполнения.
Вариант 1. Для осуществления предлагаемого способа может быть применен профилограф, использующий принципы построения известных устройств для контроля технического состояния обсаженных скважин, обеспечивающих возможность радиального перемещения датчика в скважине [см., например, авт.свид. СССР №787627 (опубл. 15.12.80) и авт.свид. СССР №863849 (опубл. 15.09.81)]. Такой профилограф (фиг.3) включает в себя измерительную часть, выполненную в соответствии с электрокинематической схемой, представленной на фиг.1, и содержит датчик, жестко связанный с защитным кожухом 1 и состоящий из идентичных по параметрам основного и вспомогательного трансформаторных преобразователей 2 и 3, первый из которых предназначен для взаимодействия с внутренней поверхностью исследуемой обсадной колонны 4, а второй - для взаимодействия с желобообразным ферромагнитным экраном 5, жестко связанным с кожухом 1 и установленным с фиксированным зазором в по отношению к его наружной поверхности. П-образные сердечники преобразователей 2 и 3 несут на себе соответственно обмотки возбуждения 6 и 7, питаемые стабилизированным переменным током со стабилизированной частотой, а также - сигнальные обмотки 8 и 9. Причем полюсные наконечники преобразователей 2 и 3 расположены на одинаковых расстояниях от наружной поверхности кожуха 1, равных величине а. При этом кожух 1 выполнен из термостойкого твердого диэлектрика либо из немагнитного металла с высоким удельным электрическим сопротивлением (манганин, сталь, титан) и совместно с экраном 5 жестко присоединен к параллелограммному механизму, закрытому на чертеже гибким рукавом 10 и смонтированному на торце ротора 11 с возможностью радиального перемещения датчика под действием привода 12, установленного внутри ротора 11. Другими типовыми элементами конструкции профилографа, обеспечивающими осуществление предлагаемого способа, являются корпус 13, заполненный диэлектрической жидкостью, компенсатор давления 14, верхний и нижний центраторы 15 и 16, электрический блок 17, расположенный в баростойкой камере с электровводом 18 и связанный через унифицированный кабельный наконечник 19 с трехжильным геофизическим бронированным кабелем 20, подключенным ко входу компьютеризированной каротажной станции (не показана), привод 21 вращения ротора 11, несущего измерительную часть, и защитный кожух 22 этой части прибора.
Перед спуском рассмотренного профилографа в обсаженную скважину производят в нормальных условиях с использованием градуировочного приспособления снятие градуировочной зависимости в соответствии с характеристикой прибора (3). При зазоре δi=0 получают опорное напряжение в виде:
Величину этого напряжения заносят в память компьютера каротажной станции и с применением алгоритма (1) осуществляют тестирование профилографа с целью определения его точностных характеристик и готовности к проведению исследования технического состояния обсадных колонн в скважинах. Причем эту подготовительную операцию целесообразно проводить на базе перед выездом на скважину.
После ввода профилографа в исследуемую колонну 4 с буровым раствором его останавливают. С помощью привода 12 измерительную часть прибора радиально перемещают в направлении зоны чувствительности основного преобразователя 2 до обеспечения рабочего зазора порядка δр=6÷10 мм, определяемого величиной разности между номинальным радиусом внутренней поверхности исследуемой колонны 4 и расстоянием от центра вращения датчика до максимально удаленной от него образующей наружной поверхности кожуха 1. После чего, с помощью привода 21 осуществляют сканирование датчиком внутренней поверхности колонны 4, определяют по показаниям профилографа неизношенный участок этой поверхности, останавливают напротив него датчик, а затем с помощью привода 12 вводят в соприкосновение с этой поверхностью наружную поверхность кожуха 1 и измеряют в случае µp≠µо опорное разностное напряжение в виде (4). Величину этого напряжения заносят в память компьютера каротажной станции для обеспечения последующего измерения зазоров δij в каждой профилографируемой i-ой точке исследуемого j-го профиля колонны 4. Выполняемая, таким образом, контрольная метрологическая операция позволяет в случае изменения магнитной проницаемости рабочей среды автоматически осуществлять корректировку градуировочной зависимости прибора и с высокой точностью по алгоритму (1) определять текущие значения зазоров δij. После отвода кожуха 1 с датчиком от внутренней поверхности колонны 4 на расстояние δр включают привод 21 вращения датчика и начинают спуск профилографа до заданной глубины со скоростью, обеспечивающей величину шага (обычно hc=0,2÷0,3 м) винтового сканирования, исключающего потерю информации о наличии дефектов на внутренней поверхности исследуемой колонны 4. Основной задачей, решаемой при этом, является выявление зон желобообразного износа и их протяженности на внутренней поверхности исследуемой колонны 4.
При завершении осуществляемого, таким образом, зондирования ствола обсаженной скважины профилограф останавливают на заданной глубине, затем приподнимают до выявленной зоны износа внутренней поверхности колонны и в соответствии с описанной выше методикой производят очередную контрольную метрологическую операцию для уточнения величины ранее измеренного опорного разностного напряжения  . После чего с шагом hc при остановках прибора для получения более качественной (детальной) информации в интересующих оператора интервалах желобного износа выполняют профилографирование поперечных профилей внутренней поверхности исследуемой колонны. Эту операцию повторяют по мере протяженности и количества зон износа, а получаемую в ходе исследования информацию используют в дальнейшем для определения расчетным путем фактических прочностных характеристик исследованной обсадной колонны.
. После чего с шагом hc при остановках прибора для получения более качественной (детальной) информации в интересующих оператора интервалах желобного износа выполняют профилографирование поперечных профилей внутренней поверхности исследуемой колонны. Эту операцию повторяют по мере протяженности и количества зон износа, а получаемую в ходе исследования информацию используют в дальнейшем для определения расчетным путем фактических прочностных характеристик исследованной обсадной колонны.
Вариант 2. Для осуществления предлагаемого способа без радиального перемещения датчика может применен профилограф, который также как и в первом варианте включает в себя измерительную часть, выполненную в соответствии с электрокинематической схемой, представленной на фиг.1, и содержит (фиг.4) аналогичные элементы конструкции: защитный кожух 1 датчика, основной и вспомогательный трансформаторные преобразователи 2 и 3, первый из которых предназначен для взаимодействия с внутренней поверхностью исследуемой обсадной колонны 4, а второй - для взаимодействия с желобообразным ферромагнитным экраном 5, обмотки возбуждения 6 и 7 и сигнальные обмотки 8 и 9, размещенные на П-образных сердечниках преобразователей 2 и 3, а также неизображенные на чертеже центраторы, компенсатор давления и другие вспомогательные элементы, характерные для аппаратуры данного типа. Новыми и конструктивно отличающимися элементами являются: ротор 23, жестко связанный с кожухом 1 и экраном 5, несущий неподвижно закрепленный в нем палец 24, реверсивный привод 25 вращения ротора 23, размещенный в корпусе 26, а также упор 27 в виде кольцевого сектора (фиг.5), жестко смонтированный на шторке 28, которая соосно установлена на корпусе 26 с возможностью вращения относительно его поверхности. При этом шторка 28 имеет верхнее окончание, выполненное в виде цилиндрического стакана с доньевым отверстием, охватывающим кольцевую канавку, предусмотренную на поверхности нижней части корпуса 26 и исключающую, например, за счет сил фрикционного взаимодействия самопроизвольное вращение шторки 28 на теле корпуса 26. Причем внутренняя поверхность нижней части шторки 28 имеет возможность беззазорного (для обеспечения δi=0) вхождения в соприкосновение с наружной поверхностью кожуха 1 в зоне действия основного преобразователя 2.
Осуществление предлагаемого способа с применением профилографа описанной конструкции предусматривает выполнение аналогичных операций в той же последовательности, что и в первом варианте его реализации. Однако в отличие от профилографа с радиальным перемещением датчика в приборе, изображенном на фиг.4 в исходном состоянии, получение опорного разностного напряжения обеспечивают с помощью шторки 28, шунтирующей полюсные наконечники основного преобразователя 2. Причем измерение этого напряжения может производиться при вращении ротора 23 с датчиком, например, против направления вращения часовой стрелки (см. фиг.5). В этом случае палец 24, находясь в контакте с правым концом упора 27, будет обеспечивать принудительное вращение шторки с сохранением исходного положения относительно полюсных наконечников основного преобразователя 2, необходимого для проведения контрольной метрологической операции. После завершения этой операции с помощью реверсивного привода 25 изменяют направление вращения ротора 23 на противоположное. В этом случае палец 24, выходя из соприкосновения с правым концом упора 27, совершает свободное перемещение на 180° до вхождения в контакт с его левым концом. После чего, шторка 28 захватывается этим пальцем 24 и вращается совместно с ротором 23 по направлению вращения часовой стрелки. При этом нижняя (шунтирующая) часть шторки 28 располагается за экраном 5, а полюсные наконечники основного преобразователя 2 открываются для обеспечения возможности сканирования внутренней поверхности колонны с определением геометрических характеристик как винтового, так и поперечных ее профилей по алгоритму (1).
Рассмотренный вариант осуществления предлагаемого способа не исключает применение шунтирующих шторок и механизмов их срабатывания иного вида.
Вариант 3. В отличие от рассмотренных выше настоящий вариант осуществления предлагаемого способа исключает необходимость применения в используемом профилографе операций по принудительному магнитному шунтированию чувствительного элемента датчика для получения опорных разностных напряжений. Для обеспечения этого, представленная на фиг.7 электрокинематическая схема профилографа отличается от схемы на фиг.1 наличием дополнительного трансформаторного преобразователя 29 с шунтирующим его полюсные наконечники дополнительным ферромагнитным телом 30 в виде пластины из магнитомягкой стали, а также выполнением коммутатора К трехпозиционным в виде электроизоляционной платы с тремя контактными пластинами 31, 32 и 33, имеющими вид кольцевых секторов, и поводка 34, несущего электрическую щетку типа «мухолапка». Дополнительный преобразователь 29 выполнен аналогичным по параметрам основному и вспомогательному преобразователям 2 и 3. При этом его П-образный сердечник несет на себе обмотку возбуждения последовательно подключенную к обмоткам возбуждения первых двух преобразователей 2 и 3 и имеет количество витков  . Сигнальная обмотка дополнительного преобразователя 29 также имеет равное с двумя другими количество витков
. Сигнальная обмотка дополнительного преобразователя 29 также имеет равное с двумя другими количество витков  и подсоединена к ним с возможностью их поочередного подключения с помощью коммутатора К к измерительной схеме профилографа. Коммутатор К в наипростейшем виде позволяет подключать к геофизическому кабелю через выпрямитель Д сигнальную обмотку основного преобразователя 2 в течение промежутка времени, обеспечиваемого поворотом поводка на 180° при скольжении его щетки по поверхности контактной пластины 31. Две другие контактные пластины 32 и 33 обеспечивают контактирование с щеткой при перемещении поводка 34 на угол, меньший 90°. Причем контактная пластина 32 подключена к сигнальной обмотке вспомогательного преобразователя 3, а контактная пластина 33 к сигнальной обмотке дополнительного преобразователя 29. При этом зазоры между всеми контактными пластинами 31, 32 и 33 используются для получения всплеск-меток, позволяющих определять очередность подключения к каротажной станции (на схеме не показана) преобразователей 2, 3 и 29. Причем полюсные наконечники дополнительного преобразователя 29 зашунтированы ферромагнитным телом 30 с зазором а, равным соответствующим зазорам основного и вспомогательного преобразователей 2 и 3, а сам преобразователь 29 предназначен для имитации беззазорного по отношению к кожуху 1 шунтирования полюсных наконечников основного преобразователя 2 с целью получения при периодическом проведении контрольных метрологических операций опорных разностных напряжений . Для обеспечения возможности проведения исследования обсаженных скважин профилографом, выполненным в соответствии с описанной схемой (см. фиг.7), необходимо, чтобы угловая скорость поводка 34 коммутатора К была вдвое меньше угловой скорости вращения датчика. Эта задача легко решается с помощью одного электродвигателя с двумя редукторами (на схеме не показаны), имеющими отличающиеся передаточные отношения. Что же касается местоположения дополнительного преобразователя 29 с шунтирующим его полюсные наконечники ферромагнитным телом 30, то оно может быть любым в зависимости от конструкции профилографа, однако наиболее предпочтительной для минимизации погрешностей, вызванных изменением температуры окружающей среды, является его установка внутри кожуха 1 на одном высотном уровне с основным и вспомогательным преобразователями 2 и 3, т.е. при расположении нейтралей их сердечников в одной поперечной плоскости. Причем для уменьшения взаимного влияния электромагнитных полей преобразователей 2, 3 и 29 плоскости ориентации их полюсных наконечников целесообразно располагать под углом 90÷135° одна относительно другой. На фиг.9 при поперечном сечении кожуха 1 и виде снизу изображена возможная схема установки преобразователей 2, 3 и 29. При этом кожух 1 с целью повышения компактности измерительной части профилографа выполнен в поперечном сечении профилированным, благодаря чему экран 5 и ферромагнитное тело 30 оказываются вписанными по наружной поверхности с кожухом 1 в окружность одного диаметра. Причем в данном случае плоскость ориентации полюсных наконечников основного преобразователя 2 расположена под углом 120° к плоскости ориентации полюсных наконечников вспомогательного преобразователя 3 и под углом 105° к плоскости ориентации полюсных наконечников дополнительного преобразователя 29. При необходимости в кожухе 1 между преобразователями 2, 3 и 29 на хвостовике 35 могут быть установлены три одинаковые экранирующие пластины 36, изготовленные из магнитомягкой стали.
и подсоединена к ним с возможностью их поочередного подключения с помощью коммутатора К к измерительной схеме профилографа. Коммутатор К в наипростейшем виде позволяет подключать к геофизическому кабелю через выпрямитель Д сигнальную обмотку основного преобразователя 2 в течение промежутка времени, обеспечиваемого поворотом поводка на 180° при скольжении его щетки по поверхности контактной пластины 31. Две другие контактные пластины 32 и 33 обеспечивают контактирование с щеткой при перемещении поводка 34 на угол, меньший 90°. Причем контактная пластина 32 подключена к сигнальной обмотке вспомогательного преобразователя 3, а контактная пластина 33 к сигнальной обмотке дополнительного преобразователя 29. При этом зазоры между всеми контактными пластинами 31, 32 и 33 используются для получения всплеск-меток, позволяющих определять очередность подключения к каротажной станции (на схеме не показана) преобразователей 2, 3 и 29. Причем полюсные наконечники дополнительного преобразователя 29 зашунтированы ферромагнитным телом 30 с зазором а, равным соответствующим зазорам основного и вспомогательного преобразователей 2 и 3, а сам преобразователь 29 предназначен для имитации беззазорного по отношению к кожуху 1 шунтирования полюсных наконечников основного преобразователя 2 с целью получения при периодическом проведении контрольных метрологических операций опорных разностных напряжений . Для обеспечения возможности проведения исследования обсаженных скважин профилографом, выполненным в соответствии с описанной схемой (см. фиг.7), необходимо, чтобы угловая скорость поводка 34 коммутатора К была вдвое меньше угловой скорости вращения датчика. Эта задача легко решается с помощью одного электродвигателя с двумя редукторами (на схеме не показаны), имеющими отличающиеся передаточные отношения. Что же касается местоположения дополнительного преобразователя 29 с шунтирующим его полюсные наконечники ферромагнитным телом 30, то оно может быть любым в зависимости от конструкции профилографа, однако наиболее предпочтительной для минимизации погрешностей, вызванных изменением температуры окружающей среды, является его установка внутри кожуха 1 на одном высотном уровне с основным и вспомогательным преобразователями 2 и 3, т.е. при расположении нейтралей их сердечников в одной поперечной плоскости. Причем для уменьшения взаимного влияния электромагнитных полей преобразователей 2, 3 и 29 плоскости ориентации их полюсных наконечников целесообразно располагать под углом 90÷135° одна относительно другой. На фиг.9 при поперечном сечении кожуха 1 и виде снизу изображена возможная схема установки преобразователей 2, 3 и 29. При этом кожух 1 с целью повышения компактности измерительной части профилографа выполнен в поперечном сечении профилированным, благодаря чему экран 5 и ферромагнитное тело 30 оказываются вписанными по наружной поверхности с кожухом 1 в окружность одного диаметра. Причем в данном случае плоскость ориентации полюсных наконечников основного преобразователя 2 расположена под углом 120° к плоскости ориентации полюсных наконечников вспомогательного преобразователя 3 и под углом 105° к плоскости ориентации полюсных наконечников дополнительного преобразователя 29. При необходимости в кожухе 1 между преобразователями 2, 3 и 29 на хвостовике 35 могут быть установлены три одинаковые экранирующие пластины 36, изготовленные из магнитомягкой стали.
Процесс осуществления предлагаемого способа в данном варианте в основном аналогичен процессам в первых двух вариантах. Однако в отличие от них проведение контрольных метрологических операций в рассматриваемом процессе исследования внутренней поверхности колонны не требует остановок профилографа на заданных глубинах. Это объясняется тем, что при вращении датчика за один оборот поочередно происходит регистрация показаний дополнительного преобразователя 29, а затем вспомогательного преобразователя 3 (см. фиг.7). Полученные величины напряжений заносятся в память компьютера каротажной станции и при следующем обороте датчика, обеспечивающем сканирование внутренней поверхности исследуемой колонны во время нахождения щетки поводка 34 на контактной пластине 31, участвуют в операциях выделения текущих разностных напряжений  и определения зазоров δij по алгоритму (1). Этот процесс может повторяться до тех пор, пока не будет прекращено вращение датчика. Здесь следует отметить, что при увеличении длины контактной пластины 31, соответствующем уменьшении длин контактных пластин 32 и 33 и изменении передаточных отношений вышеупомянутых редукторов можно существенно повысить производительность исследования профилографом обсаженной скважины за счет увеличения числа непрерывно следующих один за другим оборотов датчика с подключенным к каротажной станции основным преобразователем 2 в промежутках между одинарными оборотами, используемыми для съема информации с дополнительного и вспомогательного преобразователей 29 и 3.
и определения зазоров δij по алгоритму (1). Этот процесс может повторяться до тех пор, пока не будет прекращено вращение датчика. Здесь следует отметить, что при увеличении длины контактной пластины 31, соответствующем уменьшении длин контактных пластин 32 и 33 и изменении передаточных отношений вышеупомянутых редукторов можно существенно повысить производительность исследования профилографом обсаженной скважины за счет увеличения числа непрерывно следующих один за другим оборотов датчика с подключенным к каротажной станции основным преобразователем 2 в промежутках между одинарными оборотами, используемыми для съема информации с дополнительного и вспомогательного преобразователей 29 и 3.
Использование изобретения позволит значительно повысить точность определения профиля внутренней поверхности и желобного износа внутренней поверхности обсадных колонн в глубоких и сверхглубоких нефтяных и газовых скважинах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ПРОФИЛЕМЕР | 2008 |
|
RU2382880C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ФЕРРОМАГНИТНЫХ ТРУБ | 2008 |
|
RU2410538C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБСАЖЕННЫХ СКВАЖИН | 2008 |
|
RU2380535C1 |
| Электромагнитный профилограф трубных колонн | 1980 |
|
SU1137188A1 |
| СПОСОБ ПРОВЕДЕНИЯ ГЕОФИЗИЧЕСКИХ РАБОТ ЧЕРЕЗ БУРИЛЬНУЮ КОЛОННУ | 2009 |
|
RU2401382C1 |
| Устройство для контроля технического состояния труб обсадных колонн | 1985 |
|
SU1343925A1 |
| МАГНИТНЫЙ ЛОКАТОР ДЕФЕКТОВ И ПОВРЕЖДЕНИЙ ТРУБ | 2005 |
|
RU2328731C2 |
| СПОСОБ КОНТРОЛЯ ВОДООТДАЧИ ПРОМЫВОЧНОЙ ЖИДКОСТИ | 2014 |
|
RU2566160C1 |
| СПОСОБ ГРАДУИРОВКИ РАДИОИЗОТОПНЫХ ПЛОТНОМЕРОВ | 2010 |
|
RU2442889C1 |
| ЛОКАТОР ПЕРФОРАЦИОННЫХ ОТВЕРСТИЙ И СОЕДИНИТЕЛЬНЫХ МУФТ ОБСАДНЫХ ФЕРРОМАГНИТНЫХ ТРУБ | 2000 |
|
RU2191365C2 |



Изобретение относится к области промыслово-геофизических исследований глубоких и сверхглубоких нефтегазовых скважин. Техническим результатом изобретения является повышение точности определения профиля внутренней поверхности и желобного износа внутренней поверхности обсадных колонн. Для этого в каждой профилографируемой точке исследуемого профиля производят измерение выходных напряжений основного преобразователя, вычитают из них выходные напряжения вспомогательного преобразователя с последующей регистрацией и обработкой получаемых текущих разностных напряжений. При этом выходные напряжения вспомогательного преобразователя формируют пропорциональными магнитной проницаемости раствора путем шунтирования его полюсных наконечников ферромагнитным телом с зазором по отношению к наружной поверхности кожуха, обеспечивающим свободную циркуляцию раствора. Ферромагнитное тело размещают от наружной поверхности кожуха на расстоянии, не превышающем диапазона работы преобразователей, а сам вспомогательный преобразователь устанавливают на одном высотном уровне с основным. При проведении исследований осуществляют корректировку градуировочной зависимости датчика с учетом изменения магнитной проницаемости раствора, для чего производят кратковременное магнитное шунтирование полюсных наконечников основного преобразователя и формируют соответствующее нулевому зазору между внутренней поверхностью колонны и наружной поверхностью кожуха опорное разностное напряжение. Контролируемые зазоры, соответствующие каждой профилографируемой i-й точке исследуемого j-го профиля, определяют по приведенной математической зависимости. 7 з.п. ф-лы, 8 ил.
1. Способ исследования профиля внутренней поверхности обсадных колонн с буровым раствором в скважине прибором радиусного метода контроля зазоров между внутренней поверхностью колонны и наружной поверхностью защитного кожуха вращающегося датчика прибора с двумя присоединенными к измерительной схеме идентичными по параметрам основным и вспомогательным трансформаторными преобразователями с полюсными наконечниками, обращенными к стенке кожуха, заключающийся в том, что в каждой профилографируемой точке исследуемого профиля производят измерение выходных напряжений основного преобразователя, вычитают из них выходные напряжения вспомогательного преобразователя с последующей регистрацией и обработкой получаемых текущих разностных напряжений, отличающийся тем, что выходные напряжения вспомогательного преобразователя формируют пропорциональными магнитной проницаемости раствора путем шунтирования его полюсных наконечников ферромагнитным телом с зазором по отношению к наружной поверхности кожуха, обеспечивающим свободную циркуляцию раствора, при этом ферромагнитное тело размещают от наружной поверхности кожуха на расстоянии, не превышающем диапазона работы преобразователей, а сам вспомогательный преобразователь устанавливают на одном высотном уровне с основным.
2. Способ по п.1, отличающийся тем, что при проведении исследований осуществляют корректировку градуировочной зависимости датчика с учетом изменения магнитной проницаемости раствора, для чего производят кратковременное магнитное шунтирование полюсных наконечников основного преобразователя и формируют соответствующее нулевому зазору между внутренней поверхностью колонны и наружной поверхностью кожуха опорное разностное напряжение, а контролируемые зазоры, соответствующие каждой профилографируемой i-й точке исследуемого 7-го профиля, определяют по формуле
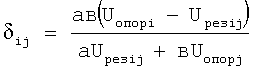 ,
,
где а - расстояние от полюсных наконечников преобразователей до наружной поверхности кожуха;
в - расстояние от наружной поверхности кожуха до встречной поверхности ферромагнитного тела, шунтирующего полюсные наконечники вспомогательного преобразователя;
Uопорj=UОПj-UВПj - опорное разностное напряжение постоянное по величине при данном составе бурового раствора на заданной глубине для j-го исследуемого профиля;
UОПj - выходное напряжение основного преобразователя, соответствующее нулевому зазору между внутренней поверхностью колонны и наружной поверхностью кожуха, для j-го исследуемого профиля;
UВПj - выходное напряжение вспомогательного преобразователя для j-го исследуемого профиля;
j=1, 2, 3, …, № - порядковый номер исследуемого профиля;
№ - количество исследуемых профилей;
Uрезij=Uδij-UВПj - текущее разностное напряжение для j-го исследуемого профиля в i-й профилографируемой точке;
Uδij - текущее выходное напряжение основного преобразователя для j-го исследуемого профиля в i-й профилографируемой точке;
i=1, 2, 3, …, k - порядковый номер профилографируемой точки исследуемого профиля;
k - количество профилографируемых точек исследуемого профиля.
3. Способ по п.2, отличающийся тем, что магнитное шунтирование основного преобразователя производят путем прижима кожуха к неизношенной внутренней поверхности исследуемого участка колонны.
4. Способ по п.2, отличающийся тем, что магнитное шунтирование основного преобразователя осуществляют с помощью устанавливаемой на приборе ферромагнитной шторки.
5. Способ по п.2, отличающийся тем, что формирование опорного разностного напряжения осуществляют с помощью размещаемого в приборе дополнительного преобразователя, аналогичного по параметрам первым двум, который периодически подключают к измерительной схеме взамен основного преобразователя при полюсных наконечниках, шунтированных дополнительным ферромагнитным телом с фиксированным зазором, равным расстоянию от полюсных наконечников основного и вспомогательного преобразователей до наружной поверхности кожуха.
6. Способ по п.5, отличающийся тем, что дополнительный преобразователь устанавливают внутри кожуха на одном высотном уровне с основным и вспомогательным преобразователями, а плоскость ориентации его полюсных наконечников располагают под углом 90÷135° относительно плоскостей ориентации полюсных наконечников двух остальных преобразователей.
7. Способ по одному из пп.1-6, отличающийся тем, что выделение текущих и опорных разностных напряжений осуществляют из выходных напряжений преобразователей, получаемых путем их двухполупериодного выпрямления.
8. Способ по п.7, отличающийся тем, что двухполупериодное выпрямление выходных напряжений преобразователей осуществляют поочередно с помощью одного выпрямителя.
| АБРАМОВ А.А | |||
| и др | |||
| Разработка устройства для определения износа обсадных колонн в процессе бурения скважин | |||
| Отчет о НИР, гос.рег | |||
| СЧЕТНЫЙ ДИСК ДЛЯ РАСЧЕТА СОСТАВНЫХ ЧАСТЕЙ ПИЩИ | 1919 |
|
SU284A1 |
| - Краснодар, 1984, с.55-64 | |||
| УСТРОЙСТВО для ИССЛЕДОВАНИЯ СТЕНОК ОБСАЖЕННЫХСКВАЖИН | 0 |
|
SU261318A1 |
| SU 877977 A1, 27.01.2000 | |||
| Способ исследования обсадных колонн в скважине и устройство для его осуществления | 1985 |
|
SU1286758A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБСАДНЫХ КОЛОНН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2134779C1 |
| СПОСОБ РАБОТЫ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ФОРСАЖНОЙ КАМЕРОЙ И ПОВОРОТНЫМ РЕАКТИВНЫМ СОПЛОМ (ВАРИАНТЫ) | 1998 |
|
RU2143578C1 |
| ИНДУКЦИОННЫЙ ЗОНД ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ ОБСАДНОЙ КОЛОННЫ | 2001 |
|
RU2203414C1 |
| ЭЛЕКТРОМАГНИТНЫЙ СКВАЖИННЫЙ ДЕФЕКТОСКОП | 2001 |
|
RU2215143C2 |

