Изобретение относится к области электротехники и может быть использовано в качестве датчика ускорения механической системы, например, космического аппарата.
Известно использование упруго закрепленной на объекте, представляющем собой динамическую систему, пробной массы, величина смещения которой вдоль заданного направления характеризует величину ускорения объекта относительно этого направления. Состояние динамической системы описывают набором переменных, выбираемых из соображений естественности их интерпретации, простоты описания, симметрии и т.п. Множество состояний динамической системы образует фазовое пространство, каждому состоянию отвечает точка в нем, а эволюция изображается (фазовыми) траекториями. Чтобы определить близость состояний, в фазовом пространстве динамической системы вводят понятие расстояния. Совокупность состояний в фиксированный момент времени характеризуется фазовым объемом [1-7]. Учет динамического состояния пилотируемого космического аппарата имеет первостепенное значение для выполнения требуемых параметров навигации и безопасности полета. Это приводит к необходимости точного измерения вектора ускорения космического аппарата под действием гравитационных и тяговых сил.
Простейшим аналогом датчика ускорения является пружинный динамометр, измеряющий вес P присоединенного к динамометру тела массой m, так что P=mg, где g=9,81 м/с2 - ускорение силы тяжести на поверхности Земли. Однако такие приборы не могут использоваться в условиях, при которых вектор ускорения космического аппарата имеет произвольно ориентированное в пространстве направление. Кроме того, пружинные динамометры имеют относительно невысокие чувствительность и точность производимых измерений, то есть имеют недостаточные метрологические свойства [8-13]. Это относится и к датчикам ускорения, основанным на использовании механических упругих элементов [14, 15].
Недостатки известных устройств измерения ускорения устранены в заявляемом датчике.
Целями изобретения являются повышение чувствительности и точности производимых измерений вектора ускорения механической системы, ориентированного произвольно в пространстве.
Указанные цели достигаются в заявляемом электромагнитном датчике ускорения, содержащем смещающуюся под действием ускорения упруго закрепленную пробную массу, а также измеритель ее смещения, отличающемся тем, что пробная масса состоит из механически жестко связанных цилиндрического магнитопровода и радиально-цилиндрически намагниченного ферромагнитного тороида, который соосно магнитно связан с закрепленным в магнитопроводящем корпусе из двух Ш-образных цилиндрических половин дополнительным радиально-цилиндрически намагниченном ферромагнитном тороиде, при этом магнитные полюсы обращенных друг к другу с небольшим зазором радиально-цилиндрически намагниченных ферромагнитных тороидов, а также магнитные полюсы обращенных друг к другу с небольшим зазором цилиндрического магнитопровода пробной массы и цилиндрическими центральными частями двух Ш-образных цилиндрических половин магнитопроводящего корпуса являются попарно одноименными, при этом на цилиндрических центральных частях Ш-образных цилиндрических половин магнитопроводящего корпуса выполнены электрические обмотки, выходы которых подключены к блоку обработки информации, выходом связанному с одним из трех входов вычислителя вектора ускорения по трем взаимно ортогональным координатам.
Блок обработки информации состоит из последовательно включенных операционного усилителя, фазочувствительного выпрямителя, инерционного звена (или интегратора) и функционального аналогового преобразователя, а также высокочастотного генератора опорного напряжения, первый выход которого включен параллельно к указанным электрическим обмоткам магнитопроводящего корпуса, а второй - к дополнительному входу фазочувствительного выпрямителя.
Вычислитель вектора ускорения J связан с выходами трех однотипных блоков обработки информации от трех взаимно ортогонально размещенных на механической системе датчиков смещения пробной массы вдоль ее оси симметрии и включает соответственно три квадратора, выходами связанными с тремя входами сумматора, который выходом подключен к входу блока извлечения квадратного корня, кроме того, включает два вычислителя углов наклона вектора ускорения относительно оси Z, совпадающей с направлением пилотной оси механической системы, расположенных в ортогональных плоскостях XZ и YZ, причем на входы первого вычислителя угла α, лежащего в плоскости XZ, поступают сигналы с выходов блоков обработки информации датчиков смещения пробной массы, расположенных вдоль осей Z и X, а на входы второго вычислителя угла β, лежащего в плоскости YZ, поступают сигналы с выходов блоков обработки информации датчиков смещения пробной массы, расположенных вдоль осей Z и Y.
Достижение целей изобретения объясняется трехкоординатой устойчивой упругой магнитной подвеской пробной массы и электронной обработкой информации о ее смещениях в трех взаимно ортогонально расположенных в пространстве датчиках.
Изобретение понятно из представленных чертежей.
На фиг.1 изображена структурная схема заявляемого устройства, содержащего:
1 - корпус датчика (вакуум-плотный),
2 - внутренний радиально-цилиндрически намагниченный ферромагнитный тороид,
3 - цилиндрический магнитопровод,
4 - внешний радиально-цилиндрически намагниченный ферромагнитный тороид,
5 - первая половина Ш-образного цилиндрического магнитопроводящего корпуса,
6 - вторая половина Ш-образного цилиндрического магнитопроводящего корпуса,
7 и 8 - элементы закрепления первой и второй половин Ш-образного цилиндрического магнитопроводящего корпуса,
9 - первая электрическая обмотка,
10 - вторая электрическая обмотка,
11 и 12 - проходные вакуум-плотные изолированные разъемы,
13 - блок обработки информации,
14 - вычислитель вектора ускорения.
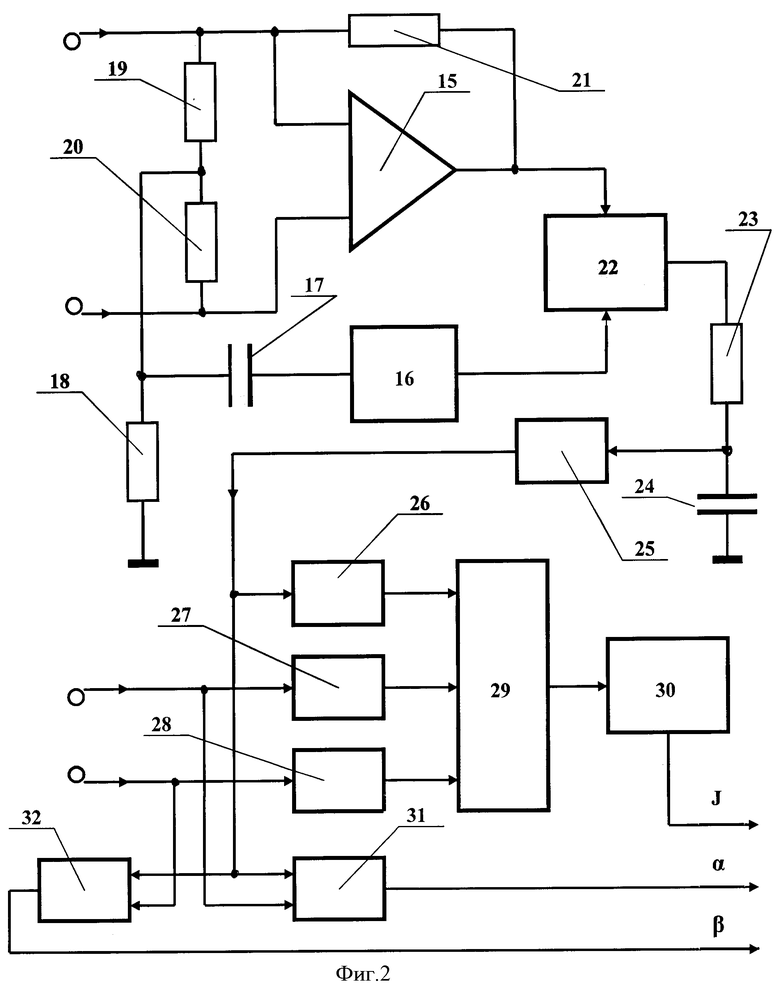
На фиг.2 представлена блок-схема блока обработки информации и вычислителя вектора ускорения. При этом блок обработки информации каждого из трех датчиков состоит из:
15 - операционного усилителя,
16 - высокочастотного генератора опорного напряжения с двумя выходами,
17 - конденсатора связи,
18 - низкоомного резистора нагрузки генератора 16,
19 и 20 - первого и второго измерительных резисторов датчика,
21 - резистора обратной связи операционного усилителя,
22 - фазочувствительного выпрямителя с двумя входами (сигнальным и опорным),
23 - резистора инерционного звена,
24 - конденсатора инерционного звена,
25 - функционального аналогового преобразователя.
Вычислитель вектора ускорения является общим для всех трех датчиков и состоит из:
26, 27 и 28 - соответственно первого, второго и третьего квадраторов, входами связанных с тремя взаимно ортогонально расположенными на механической системе датчиками (с выходами их блоков обработки информации),
29 - трехвходового сумматора,
30 - блока вычисления квадратного корня,
31 и 32 - первого и второго вычислителей углов α и β наклона вектора ускорения J относительно оси Z, совпадающей с направлением пилотной оси механической системы, расположенных в ортогональных плоскостях XZ и YZ.
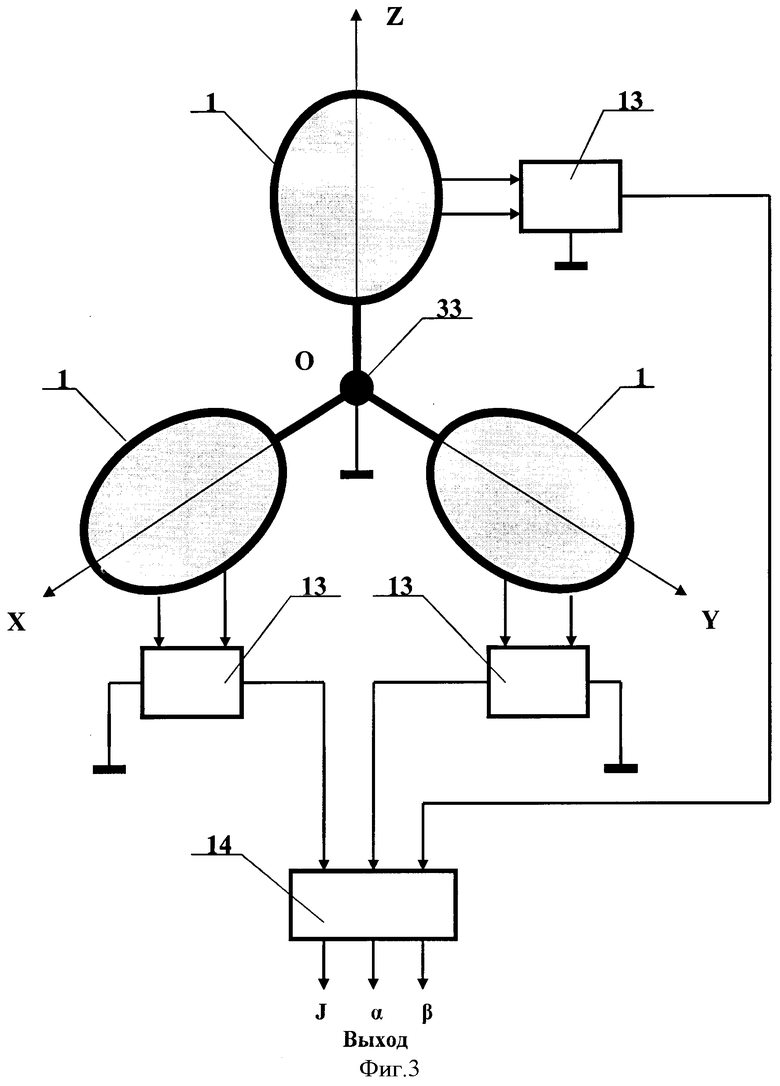
На фиг.3 изображена схема размещения в механической системе 33 трех одинаковых по конструкции датчиков с их корпусами 1, расположенными взаимно ортогонально (вдоль осей X, Y и Z декартовой системы координат), выходы которых соединены по схеме фиг.2 с тремя блоками обработки информации 13 (фактически вычислителями проекций вектора ускорения J на осях X, Y и Z). Выходы указанных трех блоков обработки информации 13 соединены с входами вычислителя вектора ускорения 14, на выходах которого возникают значения модуля вектора ускорения J, и углов α и β пространственного положения этого вектора ускорения относительно оси Z, расположенной коллинеарно с направлением пилотной оси механической системы.
Рассмотрим действие заявляемого устройства.
Пусть внутренний ферромагнитный тороид 2 радиально-цилиндрически намагничен так, что на его внешней боковой грани образован южный (S) полюс, а на его внутренней боковой грани - соответственно северный (N) полюс. Если внешний ферромагнитный тороид 4 радиально-цилиндрически намагничен так, что на его внутренней и внешней боковых гранях образованы соответственно южный (S) и северный (N) полюсы, то оба ферромагнитных тороида 2 и 4 будут испытывать взаимное отталкивание друг от друга в плоскости ХУ, ортогональной оси симметрии Z пробного тела, то есть последнее самоцентрируется симметрично относительно оси симметрии магнитопроводящего корпуса из половин 5 и 6 с внешним ферромагнитным тороидом 4. Северные полюсы цилиндрического магнитопровода 3 при этом магнитно отталкиваются от северных полюсов первой 5 и второй 6 половин Ш-образного цилиндрического магнитопроводящего корпуса, что определяет устойчивость положения пробной массы вдоль координаты Z. Таким образом, упругие связи пробной массы с корпусом прибора являются магнитными (пробная масса находится на трехмерной магнитной подушке), что исключает потери в связях, то есть повышает чувствительность и точность прибора. В отличие от упругих пружинных связей известных приборов, для которых характерна линейная связь между действующей силой и величиной смещения пробной массы, в заявляемом приборе эта зависимость является гиперболически-квадратичной, так как сила взаимодействия между магнитами обратно пропорциональна квадрату расстояния между их полюсами [16, 17].
Отметим, что наиболее сильные магниты создаются с использованием ферритов, химическая формула которых содержит редкоземельные элементы, например ферриты CoSm3, для которых произведение магнитной индукции на напряженность магнитного поля (ВН)MAX достигает величины 320 Тл.кА/м (40 млн Гс.э).
Сигналы смещения пробной массы (элементов 2 и 3) вдоль оси Z снимаются с пары электрических обмоток 9 и 10, выполненных на центральных частях половин (соответственно 6 и 5) Ш-образного цилиндрического магнитопроводящего корпуса. Для этого к ним подается параллельно и синфазно высокочастотное напряжение, образующееся в нагрузочном резисторе 18 через конденсатор связи 17 с первого выхода высокочастотного генератора опорного напряжения 16 (фиг.2). Пара одинаковых измерительных резисторов 19 и 20 и одинаковые электрические обмотки 9 и 10 образуют мостовую схему, в диагональ которой включен источник высокочастотного напряжения, образующегося на нагрузочном резисторе 18, имеющем малое омическое сопротивление (порядка десятков ом). В том случае, когда величины магнитных зазоров между торцами цилиндрического магнитопровода 3 и цилиндрическими магнитопроводами Ш-образных половин 5 и 6 одинаковы, как это имеет место, например, в состоянии невесомости, мостовая схема является строго сбалансированной, и напряжения, снимаемые с измерительных резисторов 19 и 20, являются одинаковыми по амплитуде и начальной фазе высокочастотных колебаний, вырабатываемых в генераторе 16. При этом на выходе операционного усилителя 15 переменное напряжение равно нулю. Это указывает на отсутствие ускорения механической системы, вызываемое как действием гравитации, так и силами тяговых двигателей космического аппарата вдоль направления Z (фиг.1) датчика. При наличии смещения пробной массы относительно ее равновесного положения в отсутствие ускорения вдоль ее оси симметрии возникает разбаланс мостовой схемы, поскольку при уменьшении магнитного зазора реактивное сопротивление соответствующей электрической обмотки увеличивается (так как растет индуктивность этой электрической обмотки из-за уменьшения магнитного сопротивления контура с указанной электрической обмоткой), и высокочастотные напряжения в резисторах 19 и 20 оказываются различными, но с одинаковыми начальными фазами. Это определяет появление переменного напряжения на выходе операционного усилителя 15 с величиной uвых(t)=K(U1-U2)sin ωt, где K - коэффициент усиления операционного усилителя, определяемый отношением величины резистора обратной связи 21 приблизительно к величине, равной половине величины резистора 19 (20), U1 и U2 - амплитуды переменного напряжения с круговой частотой ω соответственно на измерительных резисторах 19 и 20. Так, если магнитный зазор между торцами элементов 3 и 5 меньше зазора между торцами элементов 3 и 6, то U1<U2 (полагаем, что электрическая обмотка 10 соединена с резистором 19). При этом на выходе операционного усилителя 15 образуется высокочастотное напряжение uвых(t)=-K(U1-U2)sin ωt (полагаем, что резистор 19 подсоединен к неинвертирующему входу операционного усилителя, а резистор 20 - к инвертирующему его входу). Этот сигнал подается на первый вход (сигнальный) фазочувствительного выпрямителя 22, ко второму входу которого (опорному) подводится высокочастотное колебание со второго выхода высокочастотного генератора опорного напряжения 16. При этом на выходе фазочувствительного выпрямителя 22 образуется постоянное напряжение (если пробная масса не совершает при этом колебательных движений) UO=pK(U1-U2), где p - коэффициент передачи фазочувствительного выпрямителя (порядка единицы). Как видно, при условии U1<U2 это напряжение UO на выходе фазочувствительного выпрямителя 22 отрицательное, если, наоборот, U1>U2, то напряжение UО положительное.
В случае скачкообразного действия на механическую систему ускорения, пробная масса из элементов 2 и 3 совершает колебания вдоль оси Z (фиг.1) с учетом постоянно возникшего смещения пробной массы от среднего значения ускорения с частотой Ω собственных колебаний (где ω>>Ω), поэтому на выходе фазочувствительного выпрямителя возникает переменное напряжение uфчв(t)=UO[1+εехр(-t/τ)sinΩt], где ε - коэффициент модуляции на частоте Q, определяемый скоростью изменения ускорения вдоль оси симметрии Z пробной массы, τ - постоянная времени затухающего процесса. Однако после прохождения такого сигнала через инерционное звено из резистора 23 и конденсатора 24 (фильтра нижних частот), постоянная времени которого RC>>2π/Ω, на выходе инерционного звена возникает постоянное напряжение UO и в случае затухающего колебательного процесса смещенной в среднем пробной массы действием постоянной составляющей ускорения механической системы. Таким образом, всякое изменение во времени величины ускорения механической системы приводит пробную массу в колебательные состояния той или иной амплитуды колебаний в зависимости от скорости изменения ускорения. Исследование колебательного состояния пробной массы по сигналу на выходе фазочувствительного выпрямителя 22 позволяет получить дополнительную информацию о динамическом состоянии механической системы.
Фактор колебательности пробной массы при большом значении постоянной времени τ из-за чрезвычайно малых потерь в рассматриваемой колеблющейся системе, для снижения которых корпус датчика 1 выполняют вакуум-плотным с откачкой воздуха из него, способствует тому, что датчик имеет повышенную чувствительность к малым изменениям величин ускорения. Для сравнения следует отметить, что упруго закрепленные к механической системе пробные массы, например, с использованием пружин имеют сниженную чувствительность к малым изменениям ускорения за счет потерь в материале пружин.
Постоянную времени RC инерционного звена следует выбирать из компромиссных соображений. Она должна удовлетворять условию RC>>2π/Ω при том, что ω>>Ω, но не настолько большой, что прибор не сможет отслеживать медленные изменения ускорения. Поэтому о величине медленных во времени изменений ускорения можно судить по значению производной dUO/dt, а также по изменению во времени амплитуды колебаний на частоте ≈Ω в сигнале с выхода фазочувствительного выпрямителя 22 (знак приблизительного равенства установлен потому, что в переходном режиме значение частоты вынужденных колебаний несколько отличается от собственных колебаний пробной массы).
Важно указать, что сигнал на выходе инерционного звена UO однозначно связан с величиной смещения пробной массы. Однако величина такого смещения, вызванного действием ускорения, нелинейно связана с величиной проекции последнего на заданную ось симметрии Z. Нелинейность этой связи обусловлена гиперболически квадратичной зависимостью силы F отталкивания между торцами цилиндрического магнитопровода 3 и цилиндрическими центральными торцами двух половин Ш-образного магнитопроводящего корпуса 5 и 6, которая, как известно, для двух взаимодействующих магнитов с близко расположенными торцами и совпадающими продольными их осями равна F=Ф1Ф2/4π μ0 d2, где Ф1 и Ф2 - магнитные потоки, создаваемые соответственно ферромагнитными тороидами 2 и 4 в магнитных зазорах, μ0=1,256.10-6 Гн/м - абсолютная магнитная проницаемость вакуума, d - величина магнитного зазора между элементами 3 и 5 (3 и 6). Если в отсутствие ускорения магнитные зазоры d между элементами 3 и 5, а также между элементами 3 и 6 равны между собой, то при наличии смещения пробной массы на величину h<d для результирующей силы F(h), действующей на пробную массу m, получим выражение F(h)=Ф1Ф2h/π μ0 d3(1-h2/d2)2. Отметим, что при условии, что h<<d, получим квазилинейную связь между силой F(h) и смещением h пробной массы относительно ее центрального положения, хотя для значительных смещений h функция F(h) становится нелинейной. Поэтому получаемый сигнал U0 в общем случае является нелинейной функцией проекции ускорения JZ на ось симметрии Z пробной массы, а величина этой проекции ускорения равна JZ=F(h)/m. Это приводит к необходимости применения в составе блока обработки информации функционального аналогового преобразователя 25, на выходе которого образуется напряжение UO∗=f(UO), которое линейно связано с указанной проекцией ускорения. Необходимость применения функционального аналогового (цифрового) преобразователя 25 продиктована и тем, что из выражения для F(h) вытекает, что в предельном случае при h=d функция F(h) устремляется в бесконечность, чего на самом деле, конечно, не происходит, и при этом условии сила отталкивания максимальна, но не бесконечна. Преобразователь 25 может быть выполнен как цифровое запоминающее устройство с входным аналого-цифровым преобразователем (АЦП), задающим адрес ячейки памяти, в которой записан код, соответствующий точке на нелинейной функции преобразования, который затем поступает в выходной цифроаналоговый преобразователь (ЦАП) по схеме «UO → код адреса ячейки памяти → код данных → UO∗».
Поскольку блок обработки информации на элементах 15-25 (фиг.2) вырабатывает сигнал смещения пробной массы только вдоль одной координаты - вдоль оси симметрии Z, то этот сигнал соответствует проекции вектора ускорения, расположенного по отношению к механической системе произвольно, на данное направление - ось симметрии Z пробной массы. Это означает, что для реконструкции вектора ускорения необходимо использовать три таких датчика, оси симметрии пробных масс в которых были бы соответственно коллинеарны трем взаимно ортогональным координатным осям X, Y и Z, как это представлено на фиг.3.
Реконструкция модуля J вектора ускорения J и углов его ориентации в пространстве α и β, которые лежат в ортогональных плоскостях XZ и YZ и измеряются по отношению к оси координат Z (фиг.3), совпадающей с направлением пилотной оси механической системы 33, выполняется в вычислителе вектора ускорения 14 (фиг.1 и 3) по схеме на элементах 26-32 (фиг.2).
Известно, что по трем проекциям вектора на оси X, Y и Z, обозначаемым как JX, JY и JZ, можно найти модуль результирующего вектора по формуле: J=(JX 2+JY 2+JZ 2)1/2. Поэтому в схеме вычислителя вектора ускорения использованы три квадратора 26, 27 и 28, соединенных с трехвходовым сумматором 29, и блок извлечения квадратного корня 30. При этом входы квадраторов подключены к выходам соответствующих трех блоков обработки информации 13 датчиков, ориентированных вдоль осей X, Y и Z декартовой системы координат. Углы α и β определяются в вычислителях углов 31 и 32 по формулам α=arctg(JX/JZ), β=arctg(JY/JZ).
Значения модуля J и углов α и β являются выходными величинами заявляемого электромагнитного датчика ускорения.
Отметим, что вычислитель вектора ускорения может быть выполнен в виде чисто цифровой вычислительной структуры. При этом ЦАП функционального аналогового преобразователя 25 может отсутствовать, что упрощает устройство, а использование цифрового вычислителя также способствует увеличению точности производимых измерений.
Вместо инерционного звена можно использовать аналоговый или цифровой интегратор.
В заключение следует указать, что компенсация медленного во времени «старения» ферромагнитных тороидов 2 и 4 возможна путем их намагничивания до насыщения постоянным током требуемой величины в электрических обмотках 9 и 10, отключенных от блока обработки информации 13 и подключенных к соответствующему источнику постоянного тока, то есть без разборки конструкции датчика. Метрологическая проверка точности функционирования датчика обеспечивается подстройкой величины тока в нагрузочном резисторе 18 с выхода высокочастотного генератора опорного напряжения 16 (органы регулировки тока не показаны на фиг.2) при использовании тяготения на поверхности Земли, известный по модулю вектор гравитационного поля которого совпадает с осью симметрии Z пробной массы (фиг.1) поверяемого датчика.
Следует указать, что протекание высокочастотного тока в электрических обмотках 9 и 10 никак не нарушает точность работы заявляемого технического решения и не создает каких-либо тормозных эффектов (демпфирования) колеблющейся пробной массы датчика, движение которой описывается нелинейным дифференциальным уравнением второго порядка, численное решение которого свидетельствуют об ангармоничности колебаний пробной массы.
Заявляемое устройство рекомендуется к применению в космических навигационных системах. Оно может быть также использовано в наземных комплексах с переменной динамикой.
Литература
1. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний, 3 изд., М., 1981.
2. Биркгоф Д.Д. Динамические системы, пер. с англ., М., 1941.
3. Немыцкий В.В., Степанов В.В. Качественная теория дифференциальных уравнений, 2 изд., М. - Л., 1949.
4. Качественная теория динамических систем второго порядка, М., 1966.
5. Арнольд В.И. Математические методы классической механики, 2 изд., М., 1979.
6. Нитецки З. Введение в дифференциальную динамику, пер. с англ., М., 1975.
7. Баутин Н.H., Леонтович Е.А. Методы и приемы качественного исследования динамических систем на плоскости, М., 1976.
8. Маликов М.Ф. Основы метрологии, ч.1, М., 1949.
9. Тиходеев П.М. Очерки об исходных (метрологических) измерениях, М. - Л., 1954.
10. Бурдун Г.Д., Марков Б.Н. Основы метрологии, 3 изд., М., 1985.
11. Розенберг В.Я. Введение в теорию точности измерительных систем, М., 1975.
12. Земельман М.А., Миф H.П. Планирование технических измерений и оценка их погрешностей, М., 1978.
13. Земельман М.А. О понятии “измерение” и его обобщениях. “Измерительная техника”, 1985, №2.
14. Тимошенко С.П., Гудьер Дж. Теория упругости, пер. с англ., 2 изд., М., 1979.
15. Хан X. Теория упругости. Основы линейной теории и ее применение, пер. с нем., М., 1988.
16. Постоянные магниты. Справочник, М., 1971.
17. Эберт Г., Краткий справочник по физике, пер. с нем., под ред. К.П.Яковлева, изд. 2-е, ГИФМЛ, М., 1963, стр.420.
Изобретение относится к области электротехники и может быть использовано в качестве датчика ускорения механической системы, например, космического аппарата. Датчик содержит смещающуюся под действием ускорения упруго закрепленную пробную массу, а также измеритель ее смещения. Пробная масса состоит из жестко связанных цилиндрического магнитопровода и радиально-цилиндрически намагниченного ферромагнитного тороида, который соосно магнитно связан с закрепленным в магнитопроводящем корпусе из двух Ш-образных цилиндрических половин дополнительным радиально-цилиндрически намагниченным ферромагнитным тороидом. Магнитные полюсы тороидов и обращенных друг к другу цилиндрического магнитопровода и цилиндрических центральных частей Ш-образных цилиндрических половин магнитопроводящего корпуса, на которых выполнены электрические обмотки, являются попарно одноименными. Изобретение позволяет повысить чувствительность и точность измерения вектора ускорения механической системы, произвольно ориентированного в пространстве. 2 з.п. ф-лы, 3 ил.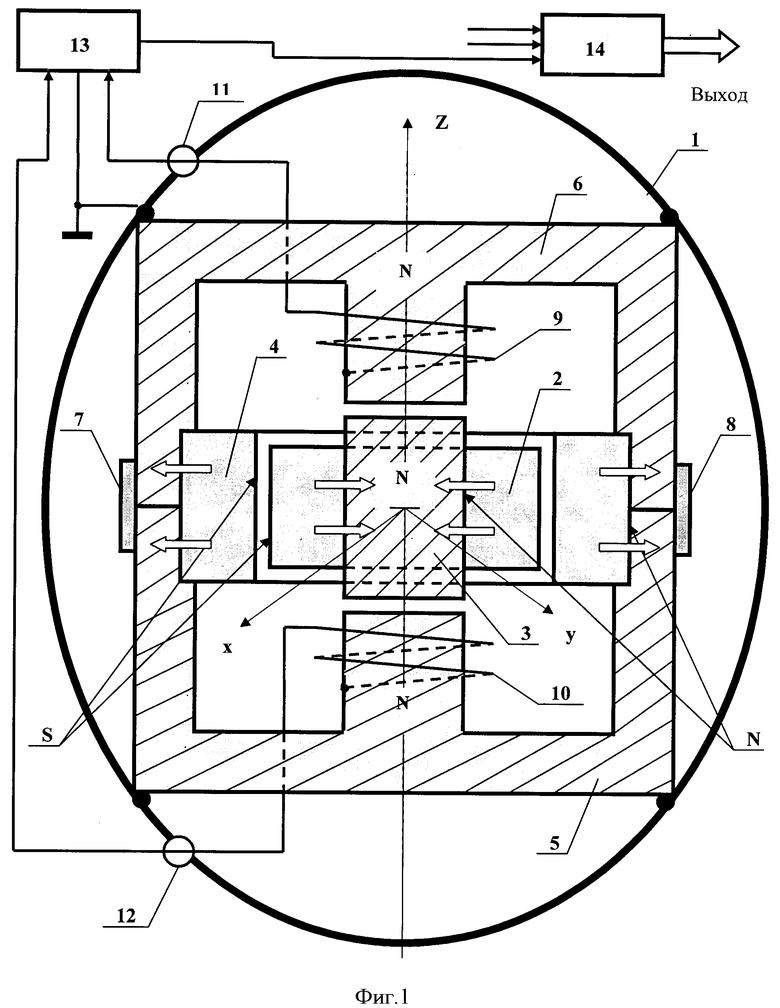
1. Электромагнитный датчик ускорения, содержащий смещающуюся под действием ускорения упругозакрепленную пробную массу, а также измеритель ее смещения, отличающийся тем, что пробная масса состоит из механически жестко связанных цилиндрического магнитопровода и радиально-цилиндрически намагниченного ферромагнитного тороида, который соосно магнитно связан с закрепленным в магнитопроводящем корпусе из двух Ш-образных цилиндрических половин дополнительным радиально-цилиндрически намагниченным ферромагнитным тороидом, при этом магнитные полюсы обращенных друг к другу с небольшим зазором радиально-цилиндрически намагниченных ферромагнитных тороидов, а также магнитные полюсы обращенных друг к другу с небольшим зазором цилиндрического магнитопровода пробной массы и цилиндрических центральных частей двух Ш-образных цилиндрических половин магнитопроводящего корпуса являются попарно одноименными, при этом на цилиндрических центральных частях Ш-образных цилиндрических половин магнитопроводящего корпуса выполнены электрические обмотки, выходы которых подключены к блоку обработки информации, выходом связанным с одним из трех входов вычислителя вектора ускорения по трем взаимно ортогональным координатам.
2. Устройство по п.1, отличающееся тем, что блок обработки информации состоит из последовательно включенных операционного усилителя, фазочувствительного выпрямителя, инерционного звена (или интегратора) и функционального аналогового преобразователя, а также высокочастотного генератора опорного напряжения, первый выход которого включен параллельно к указанным электрическим обмоткам магнитопроводящего корпуса, а второй - к дополнительному входу фазочувствительного выпрямителя.
3. Устройство по п.1, отличающееся тем, что вычислитель вектора ускорения J связан с выходами трех однотипных блоков обработки информации от трех взаимно ортогонально размещенных на механической системе датчиков смещения пробной массы вдоль ее оси симметрии и включает соответственно три квадратора, выходами связанными с тремя входами сумматора, который выходом подключен к входу блока извлечения квадратного корня, кроме того, включает два вычислителя углов наклона вектора ускорения относительно оси Z, совпадающей с направлением пилотной оси механической системы, расположенных в ортогональных плоскостях XZ и YZ, причем на входы первого вычислителя угла α, лежащего в плоскости XZ, поступают сигналы с выходов блоков обработки информации датчиков смещения пробной массы, расположенных вдоль осей Z и X, а на входы второго вычислителя угла β, лежащего в плоскости YZ, поступают сигналы с выходов блоков обработки информации датчиков смещения пробной массы, расположенных вдоль осей Z и Y.
| Преобразователь линейных ускорений | 1989 |
|
SU1642404A2 |
| Преобразователь ускорений | 1981 |
|
SU1078337A1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774270A1 |
| Преобразователь линейных ускорений | 1982 |
|
SU1051436A1 |
| Акселерометр | 1973 |
|
SU454483A1 |
| US 5210384 А, 11.05.1993. | |||

