Область техники, к которой относится изобретение
Настоящее изобретение вообще относится к передаче данных, более конкретно к способам обнаружения и демодуляции передач данных в системах беспроводной связи.
Уровень техники
В системе беспроводной связи передаваемые данные обычно обрабатываются (например, кодируются и модулируются), и затем подвергаются преобразованию с повышением частоты в радиочастотный (РЧ, RF) сигнал несущей для генерирования РЧ - модулированного сигнала, который является более подходящим для передачи по беспроводному каналу. РЧ - модулированный сигнал затем передается от передатчика и может прийти в приемник через множество путей распространения в беспроводном канале. Характеристики путей распространения со временем обычно изменяются из-за множества факторов, таких как, например, затухание, многолучевое распространение и внешние помехи. Следовательно, РЧ - модулированный сигнал может испытывать влияние различных условий (состояний) канала (например, различных эффектов затухания и многолучевых эффектов) и может быть связан с различными составными выгодами через рабочую полосу пропускания системы.
Для достижения высокой эффективности пилот-сигнал (то есть опорный сигнал) часто передается передатчиком, чтобы помочь приемнику в выполнении множества функций. Пилот-сигнал обычно генерируется на основе известных символов и обрабатывается известным образом. Пилот-сигнал может использоваться приемником для оценки канала передачи, захвата синхронизации и частоты, когерентной демодуляции и так далее.
Часто бывает желательно или необходимо обнаружить наличие передач данных в принятом сигнале. Обнаружение передач данных обычно достигается обработкой пилот-сигнала для каждой гипотетической принятой передачи данных. Если энергия пилот-сигнала больше, чем определенный порог, то гипотетическая передача данных обрабатывается дополнительно (например, демодулируется и декодируется). В таком случае для того, чтобы определить, была ли передача данных декодирована правильно или с ошибками, обычно полагаются на код с обнаружением ошибок, такой как циклический избыточный код (CRC).
В некоторых системах беспроводной связи обнаружения, основанного на одном только пилот-сигнале, недостаточно. Это может иметь место, например, при функционировании с низким полученным отношением сигнал-шум (ОСШ, SNR). Кроме того, код с обнаружением ошибок может быть недоступным при использовании для подтверждения правильности принятой передачи данных.
Поэтому в уровне техники для таких систем беспроводной связи существует потребность в способах обнаружения и демодулирования передач данных.
Сущность изобретения
Предложены способы обнаружения и демодуляции передач данных в системах беспроводной связи. В одном аспекте обеспечивается детектор с управлением по решению для обнаружения передач данных в принятом сигнале. Этот детектор использует принятые символы данных, а также принятые символы пилот-сигнала для выполнения обнаружения, и таким образом является способным к обеспечению улучшенного выполнения обнаружения. Детектор с управлением по решению может быть предназначен для функционирования в частотной области или во временной области. Для систем, использующих модуляцию со многими несущими (например, ортогональное частотное разделение (уплотнение) каналов - ОЧРК, OFDM), детектор может быть предназначен для выполнения дифференциального обнаружения в частотной области, либо когерентного обнаружения во временной области, оба из которых подробно описаны ниже.
В другом аспекте адаптивный порог используют для выполнения обнаружения принятых передач данных. Порог может быть определен для каждой гипотетической принятой передачи данных. Порог может быть вычислен, например, на основе полной энергии принятого сигнала (то есть сигнал плюс шум плюс помехи) гипотетической передачи данных. Использование адаптивного порога может обеспечить устойчивые параметры обнаружения во многих рабочих средах, таких как нелицензированный диапазон частот, в котором могут присутствовать различные источники помех.
Различные аспекты и варианты осуществления изобретения подробно описаны ниже. Например, здесь также описаны структуры приемника для различных схем передачи.
Краткое описание чертежей
Признаки, характер, и преимущества настоящего изобретения станут более очевидными из сформулированного ниже подробного описания, рассмотренного совместно с чертежами, в которых одинаковые номера позиций соответственно по всему тексту совпадают и на которых:
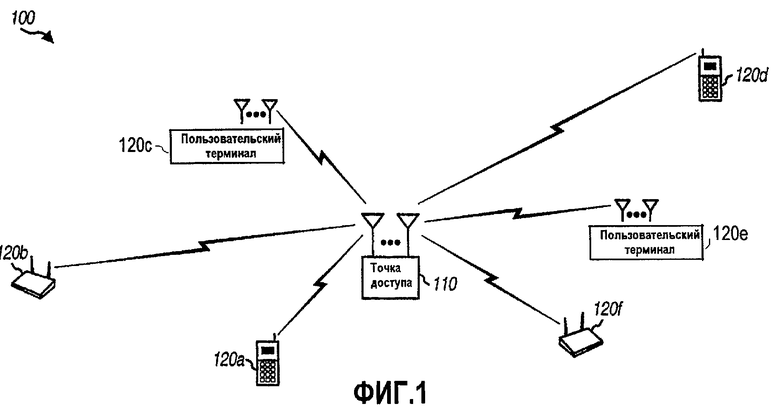
фиг.1 изображает систему беспроводной связи;
фиг.2A и 2B изображают обычные модули данных протокола (МДП, PDU) для каналов 1 и 2, соответственно;
фиг.3A изображает блок-схему блока передатчика;
фиг.3B иллюстрирует символ ОЧРК;
фиг.4 изображает блок-схему блока приемника;
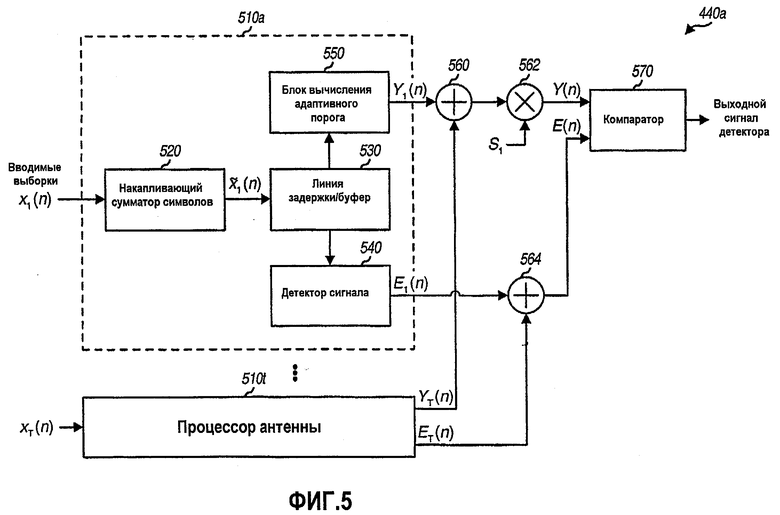
фиг.5 изображает корреляционный детектор;
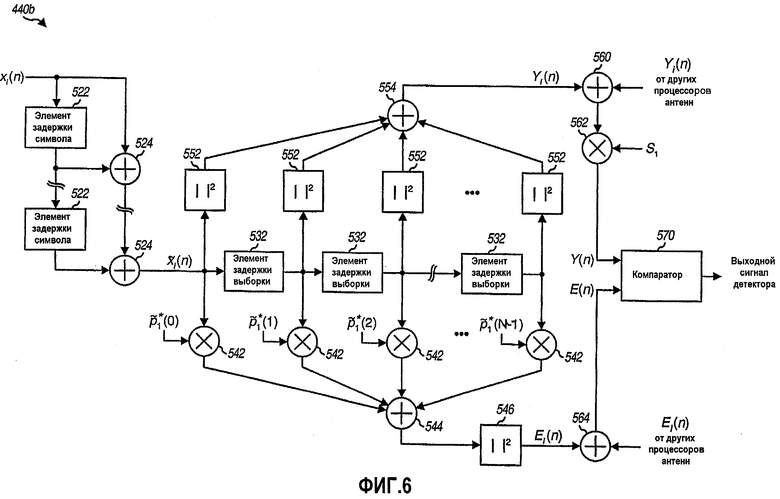
фиг.6 изображает вариант осуществления корреляционного детектора;
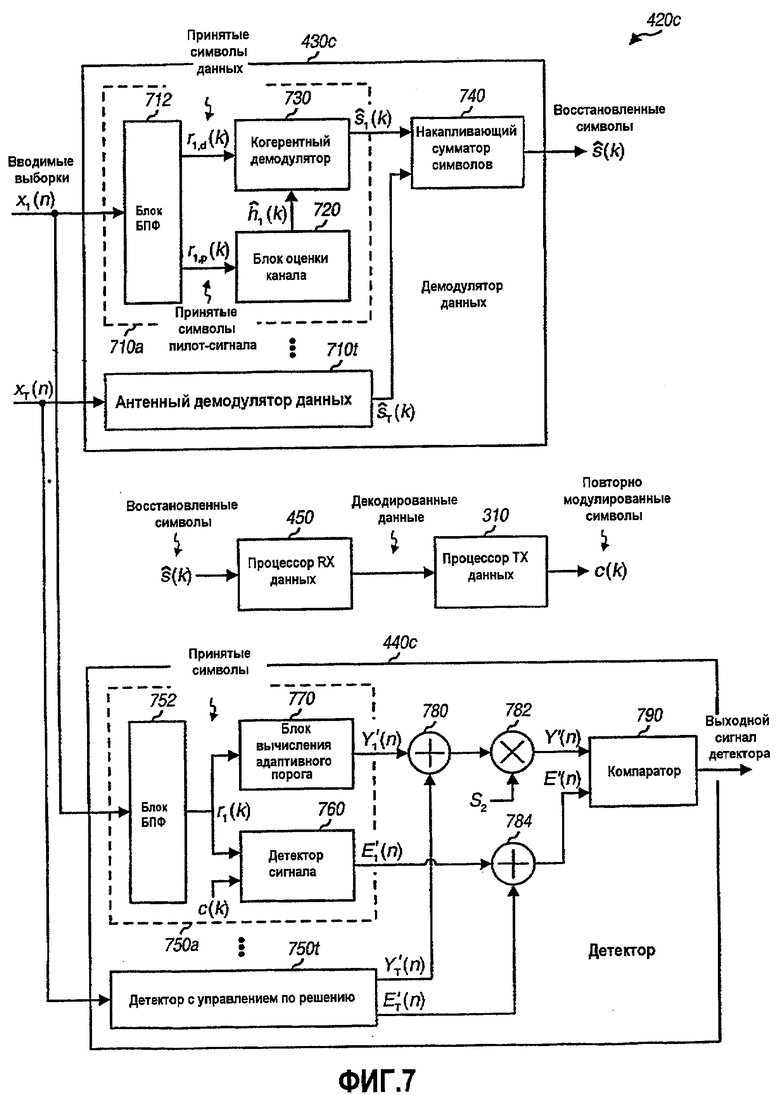
фиг.7 изображает детектор/демодулятор данных, который включает в себя демодулятор данных и детектор с управлением по решению;
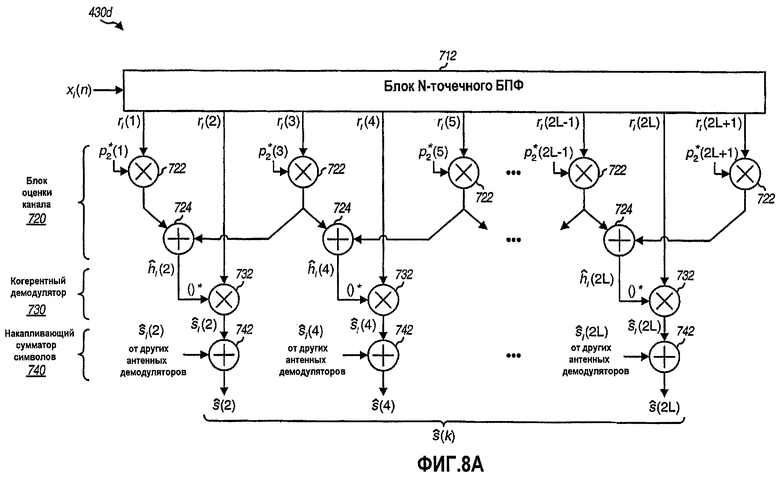
фиг.8A изображает вариант осуществления демодулятора данных;
фиг.8B изображает детектор с управлением по решению, который выполняет дифференциальное обнаружение в частотной области;
фиг.8C изображает детектор с управлением по решению, который выполняет когерентное обнаружение во временной области;
фиг.9 изображает блок-схему точки доступа и пользовательского терминала;
фиг.10A и 10B изображают обычные передачи по каналам 1 и 2 соответственно; и
фиг.11A и 11B изображают обработку приемника для каналов 1 и 2 соответственно.
Подробное описание
Слово "обычный" используется здесь в значении "служащий примером, образцом, или иллюстрацией". Любой вариант осуществления, описанный здесь как "обычный" не обязательно должен истолковываться как предпочтительный или преимущественный по отношению к другим вариантам осуществления.
Фиг.1 изображает систему беспроводной связи 100, которая включает в себя множество точек доступа (ТД, AP) 110, которые обмениваются информацией с множеством пользовательских терминалов (ПТ, UT) 120. (Для простоты на фиг.1 изображена только одна точка доступа.) Точка доступа также может называться базовой станцией или какими-нибудь другими терминами. Каждый пользовательский терминал может являться стационарным или мобильным терминалом и также может называться терминалом доступа, мобильной станцией, удаленной станцией, пользовательским оборудованием (ПО, UE), беспроводным устройством или какими-нибудь другими терминами. Каждый пользовательский терминал в любой заданный момент может обмениваться информацией с одной или, возможно, множеством точек доступа по нисходящей и/или восходящей линии связи. Нисходящая линия связи (то есть прямая линия связи), относится к передаче от точки доступа к пользовательскому терминалу, а восходящая линия связи (то есть обратная линия связи) относится к передаче от пользовательского терминала к точке доступа.
Описанные здесь способы для обнаружения и демодуляции передачи данных могут использоваться в различных системах беспроводной связи. Например, эти способы могут использоваться в системах, которые используют (1) одну или множество антенн для передачи данных, и одну или множество антенн для приема данных, (2) различные способы модуляции (например, множественный (коллективный) доступ с кодовым разделением каналов (МДКР, CDMA, ОЧРК и так далее), и (3) один или множество частотных диапазонов для нисходящей и восходящей линий связи.
Для ясности, ниже подробно описываются способы для обычной системы беспроводной связи. В этой системе приемник оборудован множеством (T) антенн для приема данных, и передатчик может быть оборудован одной или множеством антенн. Система дополнительно использует ортогональное частотное разделение (уплотнение) (ОЧРК), которое эффективно разделяет полную ширину полосы пропускания системы на множество (N) ортогональных поддиапазонов. При ОЧРК данные или пилот-сигнал, которые будут переданы в каждом поддиапазоне, сначала подвергаются модулированию (то есть символ преобразуется), используя определенную схему модуляции. Нулевыми значениями сигналов снабжаются поддиапазоны, не используемые для передачи данных/пилот-сигнала. Для каждого периода символа ОЧРК символы модуляции и нулевые значения сигналов для всех N поддиапазонов преобразуются во временную область, используя обратное быстрое преобразование Фурье (ОБПФ, IFFT), чтобы получить преобразованный символ, который содержит N выборок временной области. Для борьбы с межсимвольными помехами (МСП, ISI) часть каждого преобразованного символа часто повторяют для формирования соответствующего символа ОЧРК, который затем передают по беспроводному каналу. Период символа ОЧРК (или просто период символа) соответствует длительности одного символа ОЧРК, который является наименьшим элементом передачи для системы. В одном конкретном проекте ширина полосы пропускания системы составляет 20 МГц, N=64, поддиапазонам назначены индексы от -32 до +31, длительность каждого преобразованного символа составляет 3,2 пикосекунды (пс), циклический префикс равен 800 наносекунд (нс), и длительность каждого символа ОЧРК равна 4,0 микросекундам (мкс).
Для ясности, ниже описываются две конкретных схемы передачи и две структуры приемника. Первая схема передачи используется для транспортного канала 1 (или просто канала 1 или КАН1, CH1) и имеет следующие характеристики: (1) передачи по каналу 1 не содержат временной компенсации в передатчике и достигают произвольных продолжительностей в приемнике, и (2), каждая передача по каналу 1 включает в себя множество символов ОЧРК для данных и пилот-сигнала. Вторая схема передачи используется для транспортного канала 2 (или просто канала 2 или КАН2, CH2) и имеет следующие характеристики: (1) передачи по каналу 2 содержат временную компенсацию в передатчике и достигают синхронизации по времени в границах временного интервала в приемнике, и (2), каждая передача по каналу 2 включает в себя единственный символ ОЧРК как для данных, так и для пилот-сигнала. Медленные и быстрые каналы с произвольным доступом с характеристиками, подобными характеристикам каналов 1 и 2, описаны в заявке на патент US № 60/432440.
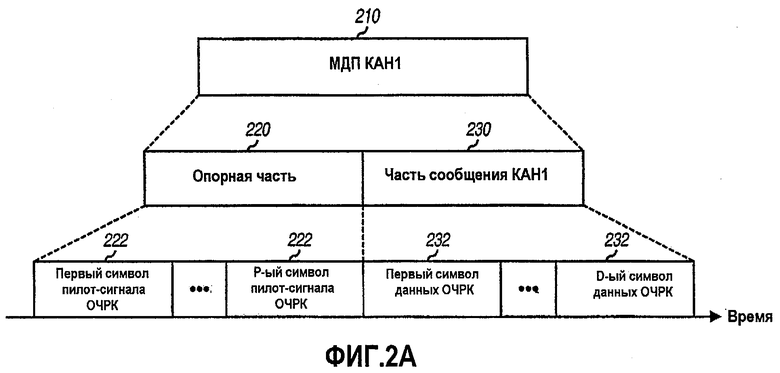
Фиг.2A изображает обычный модуль данных протокола (МДП) 210, который может использоваться для канала 1 (МДП КАН1). МДП КАН1 210 содержит опорную часть 220, которая разделена по времени при помощи временного разделения сигналов (TDM) с частью сообщения КАН1 230. Опорная часть 220 включает в себя P символов 222 пилот-сигнала ОЧРК, где P может являться любым целым числом: единицей или более. Символы пилот-сигнала ОЧРК используются для облегчения захвата и обнаружения передачи КАН1, а также для помощи в когерентной демодуляции части сообщения КАН1. Часть сообщения КАН1 230 включает в себя D символов 232 данных ОЧРК, где D может являться любым целым числом: единицей или более. Символы пилот-сигнала ОЧРК и символы данных ОЧРК могут генерироваться как описано ниже.
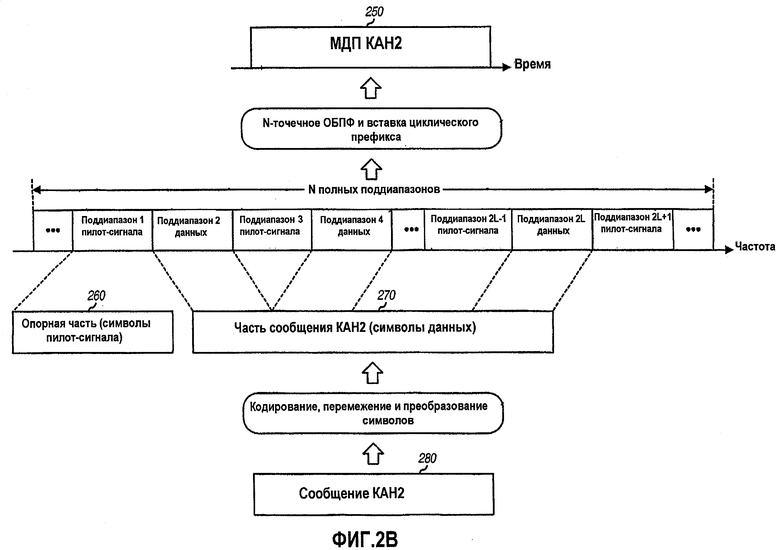
Фиг.2B изображает обычный МДП 250, который может использоваться для канала 2 (МДП КАН2). МДП КАН2 250 содержит опорную часть 260, которая представляет собой поддиапазон, мультиплексированный с частью 270 сообщения КАН2. Опорная часть 260 содержит набор символов пилот-сигнала, который передается в одном наборе поддиапазонов (показанных на Фиг.2B как заштрихованные поддиапазоны). Часть 270 сообщения КАН2 содержит группу символов данных, которая передается в другом наборе поддиапазонов. Символы данных генерируются посредством кодирования, перемежения и преобразования символов сообщения 280 КАН2. Мультиплексированные в частотной области символы пилот-сигнала и символы данных обрабатываются для генерирования МДП КАН2 250 временной области, как описано ниже.
В варианте осуществления, показанном на Фиг.2B, поддиапазоны пилот-сигнала и поддиапазоны данных чередуются таким образом, что каждый поддиапазон данных обрамляется с обеих сторон поддиапазонами пилот-сигнала. Символы пилот-сигнала, передаваемые в поддиапазонах пилот-сигнала, могут использоваться для оценки ответов канала для поддиапазонов данных и для когерентной демодуляции. Также, без выхода за рамки объема изобретения могут быть реализованы другие схемы мультиплексирования поддиапазона. Например, каждая группа из Q поддиапазонов данных может обрамляться с обеих сторон поддиапазонами пилот-сигнала, где Q может являться любым положительным целым числом.
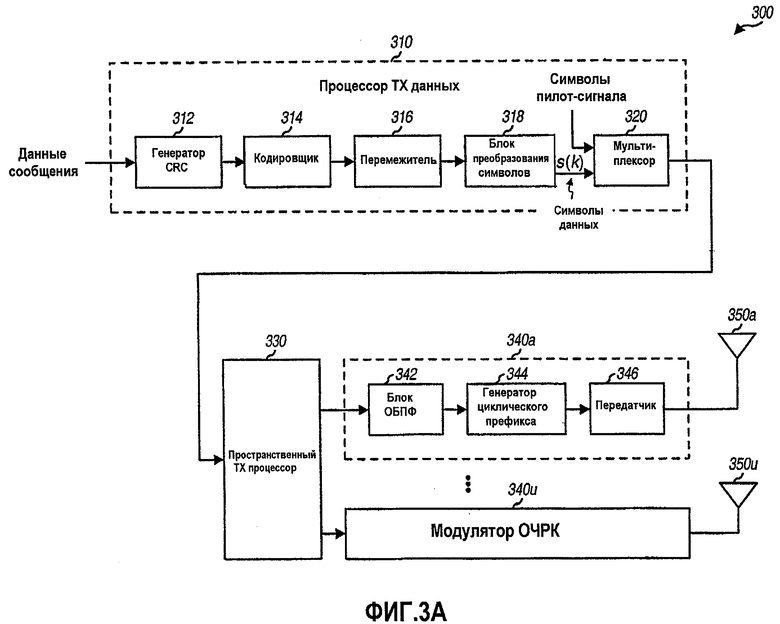
Фиг.3A изображает блок-схему варианта осуществления блока передатчика 300, который может выполнять обработку передаваемых данных для описанных выше каналов 1 и 2. Блок передатчика 300, который может быть осуществлен в пределах точки доступа или пользовательского терминала, включает в себя процессор 310 передаваемых (TX) данных, дополнительный TX пространственный процессор 330, и один модулятор 340 ОЧРК для каждой передающей антенны.
В пределах процессора 310 TX данных, генератор 312 CRC принимает данные для сообщения КАН1 или КАН2 и (необязательно) генерирует значение CRC для сообщения. Кодер 314 затем кодирует данные сообщений и значение CRC (если оно содержится) в соответствии с определенной схемой кодирования, обеспечивая кодовые биты. Затем перемежитель 316 перемежает (то есть переупорядочивает) кодовые биты на основе определенной схемы перемежения для обеспечения частотного и, возможно, временного разнесения. Затем блок 318 преобразования символов преобразует перемеженные данные в соответствии с определенной схемой модуляции, обеспечивая символы модуляции, которые также называются символами данных и обозначаются в виде s(k).
Мультиплексор (MUX) 320 принимает и мультиплексирует символы данных с символами пилот-сигнала способом, заданным для обрабатываемых сообщений КАН1 или КАН2. Для варианта осуществления, показанного на Фиг.2A, МДП КАН1 содержит P символов пилот-сигнала ОЧРК, сопровождаемых D символами данных ОЧРК. Для сообщения КАН1, мультиплексор 320 предоставляет набор символов пилот-сигнала {p 1 (k)} для каждого из P символов пилот-сигнала ОЧРК, а затем - символы данных для каждого из D символов данных ОЧРК. Для варианта осуществления, показанного на Фиг. 2B, МДП КАН2 содержит L+1 символов пилот-сигнала, чередуемых с L символами данных. Для сообщения КАН2, мультиплексор 320 обеспечивает набор L+1 символов пилот-сигнала {p 2(k)}, мультиплексированный с группой из L символов данных. В любом случае, мультиплексор 320 обеспечивает поток мультиплексированных символов пилот-сигнала и символов данных.
Таблица изображает определенный вариант осуществления двух наборов символов пилот-сигнала, {p 1(k)} и {p 2(k)}, для опорных частей КАН1 и КАН2. В этом варианте осуществления только 52 из 64 полных поддиапазонов используются для передач данных и пилот-сигналов, а другие 12 поддиапазонов (с нулевыми записями в таблице) не используются. В варианте осуществления символы пилот-сигнала являются символами модуляции квадратурной фазовой манипуляции (QPSK). 52 символа пилот-сигнала для опорной части КАН1 выбираются таким образом, что сигнал, генерируемый на основе этих символов пилот-сигнала, имеет минимальный разброс пиковых значений к средним. Эта характеристика предоставляет символу пилот-сигнала ОЧРК возможность быть переданным на более высоком уровне мощности, который может обеспечить улучшенные рабочие параметры.
Символы пилот-сигнала для КАН1 и КАН2
пилот-сигнала КАН1
p
1
(k)
КАН2
p
2
(k)
пилот-
сигнала КАН1
p
1
(k)
пилот-сигнала
КАН2
p
2
(k)
пилот-сигнала
КАН1
p
1
(k)
пилот-сигнала
КАН2
p
2
(k)
пилот-
сигнала КАН1
p
1
(k)
пилот-сигнала КАН2
p
2
(k)
Если в наличии имеется множество антенн, то дополнительный пространственный TX процессор 330 может использоваться для выполнения пространственной обработки на мультиплексируемых символах пилот-сигнала и символах данных. Например, TX пространственный процессор 330 может выполнять пространственную обработку для: (1) управления или формирования положения главного лепестка диаграммы направленности антенны для передачи символов по отдельному пространственному каналу канала MIMO, (2) передачи разнесения для передачи символов по множеству антенн и поддиапазонов для того, чтобы достичь разнесения, или (3) пространственного мультиплексирования для передачи символов по множеству пространственных каналов. Пространственная обработка для всех этих режимов передачи подробно описана в предварительной заявке US № 60/421,309.
TX пространственный процессор 330 обеспечивает один поток передаваемых символов для каждой антенны. Передаваемые символы являются просто мультиплексируемыми символами данных и символами пилот-сигнала, если пространственная обработка не выполняется. Каждым передаваемым потоком символов снабжается соответствующий модулятор 340 ОЧРК. В пределах каждого модулятора 340 ОЧРК, блок 342 обратного быстрого преобразования Фурье (ОБПФ) преобразует каждую последовательность из N передаваемых символов в преобразованный символ временной области, состоящий из N выборок временной области, где N представляет собой общее количество поддиапазонов. Для каждого преобразованного символа генератор 344 циклического префикса повторяет часть преобразованного символа для того, чтобы сформировать соответствующий символ ОЧРК, состоящий из М выборок. Генератор 344 циклического префикса снабжает потоком символов ОЧРК передатчик 346 (TMTR), который преобразует поток символов ОЧРК в один или более аналоговых сигналов и дополнительно усиливает, фильтрует и подвергает преобразованию с повышением частоты аналоговый сигнал (сигналы) для того, чтобы сгенерировать РЧ модулированный сигнал, который затем передается от связанной антенны 350.
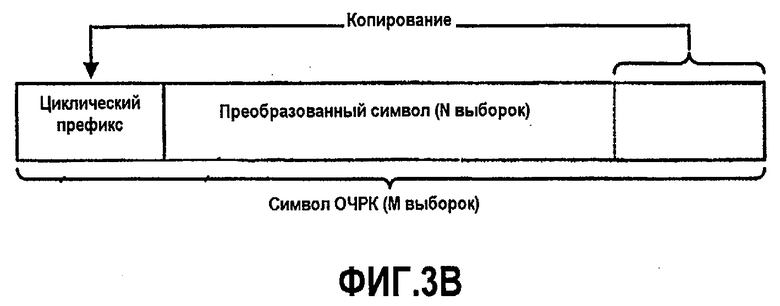
Фиг.3B иллюстрирует символ ОЧРК, который составлен из двух частей: циклического префикса и преобразованного символа. В варианте осуществления N=64, циклический префикс содержит 16 выборок и каждый символ ОЧРК содержит М=80 выборок. Циклический префикс является копией последних 16 выборок (то есть циклическим продолжением) преобразованного символа и вставляется перед преобразованным символом. Циклический префикс гарантирует, что символ ОЧРК сохраняет свои свойства ортогональности при наличии запаздывания вследствие многолучевого распространения.
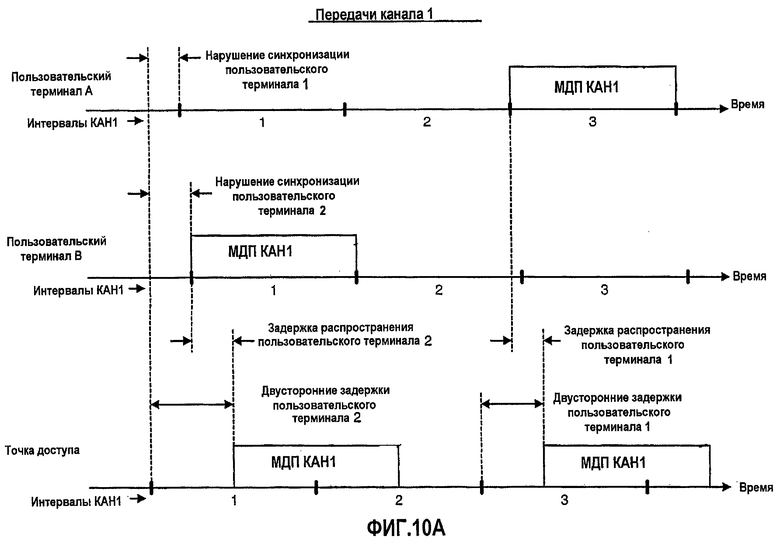
Фиг.10A изображает обычную передачу по каналу 1. Временной график для канала 1 подразделяется на интервалы КАН1, причем каждый интервал КАН1 имеет определенную длительность (например, P+D периодов символа ОЧРК). В варианте осуществления, один МДП КАН1 может быть передан по каждому интервалу КАН1.
Временные и частотные характеристики пользовательских терминалов A и B фиксируются по отношению к аналогичным характеристикам системы. Это может быть достигнуто при помощи приема передачи (например, пилот-сигнала запросчика), который является несущим или вложенным для синхронизирующей информации. Затем пользовательские терминалы устанавливают свою синхронизацию на основе принятой синхронизирующей информации. Однако синхронизация каждого пользовательского терминала может быть нарушена (или задержана) относительно синхронизации системы, причем величина нарушений обычно соответствует задержке распространения для передачи, содержащей синхронизирующую информацию. Если как пользовательские терминалы, так и система принимают свою синхронизирующую информацию от общего источника времени (например, Глобальной Системы Позиционирования - GPS), то нарушений синхронизации между этими объектами может и не быть.
На Фиг.10A пользовательские терминалы A и B (например, беспорядочно) выбирают два различных интервала КАН1 (например, интервалы 3 и 1 соответственно) для того, чтобы передать свои МДП КАН1. Поскольку пользовательские терминалы A и B являются связанными с различными нарушениями синхронизации и различными задержками распространения, их МДП КАН1 достигают точки доступа с различными задержками (называемыми двусторонними задержками (задержками на прохождение сигнала в прямом и обратном направлении или RTD) по отношению к границам интервалов точки доступа КАН1.
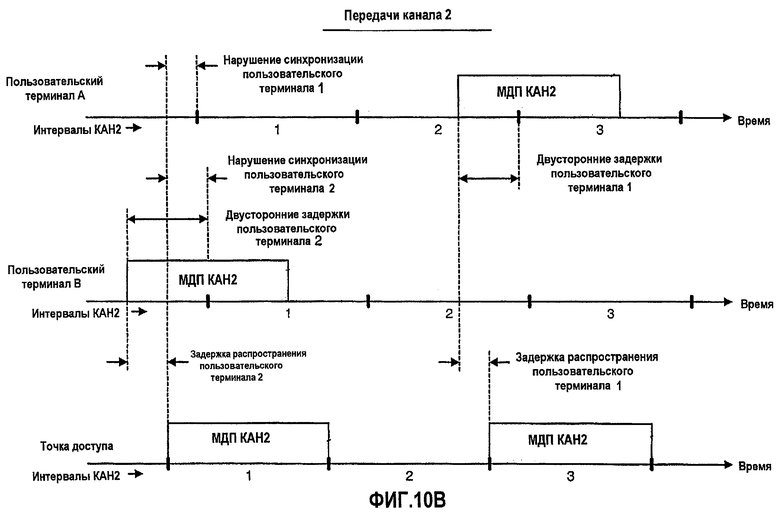
Фиг.10B изображает обычную передачу по каналу 2. Временной график для канала 2 подразделяется на интервалы КАН2, причем каждый интервал КАН2 имеет определенную длительность (например, один период символа ОЧРК). В варианте осуществления один МДП КАН1 может быть передан по каждому интервалу КАН1. Один МДП КАН2 может быть передан по каждому интервалу КАН2.
На Фиг.10B временные характеристики пользовательских терминалов A и B зафиксированы по отношению к аналогичным характеристикам системы и эти терминалы дополнительно имеют информацию об их RTD, которая может быть определена точкой доступа (например, во время обращения к системе) и передана назад на пользовательские терминалы. Пользовательские терминалы после этого могут отрегулировать свою передаваемую синхронизацию для вычисления их RTD таким образом, чтобы их МДП КАН2 достигали в точке доступа согласования по времени с выбранными границами интервала КАН2.
На Фиг.10B пользовательские терминалы A и B (например, беспорядочно) выбирают интервалы 3 и 1 КАН2 соответственно для того, чтобы передать свои МДП КАН2. Поскольку передачи пользовательских терминалов A и B компенсированы по времени, МДП КАН2 достигают точки доступа приблизительно подогнанными к границам выбранных интервалов КАН2, как показано на Фиг.10B.
Фиг.4 изображает блок-схему варианта осуществления блока приемника 400, который может выполнять описанную выше обработку принятых данных для каналов 1 и 2. Блок приемника 400, который также может быть реализован в пределах точки доступа или пользовательского терминала, включает в себя один приемник (RCVR) 410 для каждой из T приемных антенн 408, детектор/демодулятор данных 420, и процессор 450 принятых (RX) данных.
Каждая антенна 408 принимает РЧ - модулированные сигналы, передаваемые блоком передатчика и снабжает принятыми сигналами соответствующий приемник 410. Каждый приемник 410 адаптирует (например, усиливает, фильтрует и подвергает преобразованию с понижением частоты) принятый им сигнал, и переводит адаптированный сигнал в цифровую форму для обеспечения выборок, которые обозначаются как x i(n).
Детектор/демодулятор данных 420 включает в себя демодулятор 430 данных и детектор 440, которые принимают и обрабатывают выборки от всех приемников 410 для того, чтобы обнаружить и демодулировать передачи данных по каналам 1 и 2. Обработка блоком 420 более подробно описывается ниже. Блок 420 обеспечивает восстановление символов данных, обозначаемых как ŝ(k), которые являются оценками переданных символов данных s(k). В пределах процессора 450 RX данных, восстановленные символы данных подвергаются обратному преобразованию блоком 452 обратного преобразования символов, обратному перемежению блоком 454 обратного перемежения и декодированию декодером 456 для снабжения декодированными данными сообщений КАН1 и КАН2. Если восстановленное сообщение включает в себя значение CRC, то блок 458 проверки CRC проверяет сообщение со значением CRC для определения того, было ли оно декодировано правильно или с ошибкой.
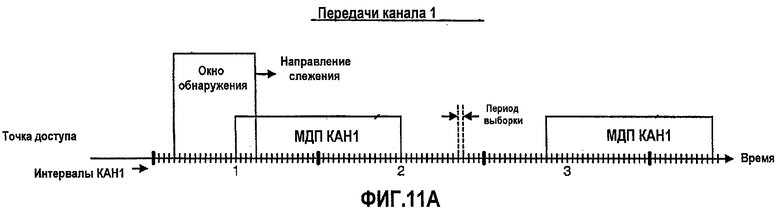
Фиг.11A изображает обработку принятых данных для канала 1, которые не содержат временной компенсации. Обратившись назад к Фиг.10A, увидим, что несмотря на то, что блоки передатчика пытаются осуществить передачу в определенных интервалах КАН1, передачи КАН1 не содержат временной компенсации, и результирующее поведение канала 1 подобно поведению канала, не разделенного на временные интервалы. В этом случае, обратившись назад к Фиг.11A, увидим, что блок приемника может использовать следящий корреляционный детектор для обнаружения передач для КАН1, каждая из которых может быть принята, начиная с любого периода выборки.
Корреляционный детектор, который может функционировать во временной области, осуществляет слежение по всему временному диапазону, в котором МДП КАН1 могут быть приняты, один период выборки одновременно. Окно обнаружения указывает период времени, в котором выборки для одного МДП КАН1 должны быть обработаны детектором. Это окно обнаружения может инициализироваться к началу первого интервала КАН1 и затем скользить вперед на один период выборки за раз. Для каждого периода выборки, который соответствует гипотезе, корреляционный детектор обрабатывает выборки в пределах окна обнаружения, определяя показатель для гипотетического принятого МДП КАН1, начиная с этого периода выборки. Если показатель превышает порог КАН1, то МДП КАН1 дополнительно декодируется для восстановления сообщения КАН1. Показатель может иметь отношение к энергии сигнала или некоторым другим параметрам. Порог КАН1 может являться фиксированным или адаптивным (например, динамически определяться на основе выборок в пределах окна обнаружения).
Фиг.5 изображает блок-схему корреляционного детектора 440a, который представляет собой один вариант осуществления детектора 440, представленного на Фиг.4. Выборками x
i(n) для каждой из T приемных антенн снабжается соответствующий процессор 510 антенны. В пределах каждого процессора 510 накапливающий сумматор 520 символов принимает и накапливает выборки для текущей гипотезы и снабжает накопленными выборками  (n) линию задержки/буфер 530. Для МДП КАН1, показанного на Фиг.2A, накапливающий сумматор 520 символов выполняет накопление P символов пилот-сигнала ОЧРК, причем накопление выполняется на выборочной основе, обеспечивая накопление символов пилот-сигнала ОЧРК, имеющих М выборок. Линия задержки/буфер 530 обеспечивает хранение для N из М выборок и фактически отбрасывает M-N выборок для циклического префикса. Эти N выборок для преобразованного символа являются соответствующими накопленному символу пилот-сигнала ОЧРК.
(n) линию задержки/буфер 530. Для МДП КАН1, показанного на Фиг.2A, накапливающий сумматор 520 символов выполняет накопление P символов пилот-сигнала ОЧРК, причем накопление выполняется на выборочной основе, обеспечивая накопление символов пилот-сигнала ОЧРК, имеющих М выборок. Линия задержки/буфер 530 обеспечивает хранение для N из М выборок и фактически отбрасывает M-N выборок для циклического префикса. Эти N выборок для преобразованного символа являются соответствующими накопленному символу пилот-сигнала ОЧРК.
Затем детектор 540 сигнала определяет показатель для накопленного символа пилот-сигнала ОЧРК. В варианте осуществления и как описано ниже, показатель относится к энергии сигнала N выборок для накопленного символа пилот-сигнала ОЧРК. Однако без выхода за рамки объема изобретения также может использоваться другой показатель. Блок 550 вычисления адаптивного порога определяет величину адаптивного порога Y i(n) для использования при определении того, действительно ли передача КАН1 была принята. Сумматор 560 суммирует пороговые величины для всех T антенн, чтобы обеспечить совокупную пороговую величину Y tot(n), которая дополнительно масштабируется с масштабным коэффициентом S 1 посредством умножителя 562 для того, чтобы получить итоговую пороговую величину Y(n). Сумматор 564 суммирует значения показателей для всех T антенн, обеспечивая итоговое значение показателя E(n), которое затем сравнивается с итоговой пороговой величиной Y(n) при помощи компаратора 570. Выходной сигнал детектора укажет, что если E(n)>Y(n), то МДП КАН1 был принят, а в противном случае КАН1 МДП не был принят.
Фиг.6 изображает блок-схему корреляционного детектора 440b, который является одним вариантом осуществления детектора 440a, представленного на Фиг.5. Выборками x
i(n) для каждой приемной антенны снабжается накапливающий сумматор 520 символов, который реализуется на базе P-1 элементов 522 задержки и P-1 сумматоров 524. Каждый элемент 522 задержки обеспечивает один символ ОЧРК (то есть М выборок) задержки. P-1 сумматоров 524 выполняют накопление P символов пилот-сигнала ОЧРК на основании выборок, и последний сумматор обеспечивает (n) выборок для накопленных символов пилот-сигнала ОЧРК. Выборки (n) могут быть выражены следующим образом:

 (n)=
(n)= , где i∈{1 ... T}(1)
, где i∈{1 ... T}(1)
Выборками (n) снабжается линия/буфер 530 задержки, которые реализуются на базе N-1 элементов 532 задержки, каждый из которых обеспечивает один период выборки задержки.
Детектор 540 сигнала выполняет корреляцию накопленного символа пилот-сигнала ОЧРК с известным символом пилот-сигнала ОЧРК и определяет значение показателя E
i(n) для накопленного символа пилот-сигнала ОЧРК. Каждой из N выборок для накопленного символа пилот-сигнала ОЧРК снабжается соответствующий умножитель 542, который также принимает соответствующую сопряженную выборку пилот-сигнала  (j), где j∈ {0 ... N-1}. Для получения {(j)} набор символов пилот-сигнала {p
1(k)} для поддиапазонов пилот-сигнала и нулевые значения сигналов для неиспользованных поддиапазонов (например, как показано в таблице), преобразуются во временную область, используя N-точечный ОБПФ, получая N выборок пилот-сигнала,
(j), где j∈ {0 ... N-1}. Для получения {(j)} набор символов пилот-сигнала {p
1(k)} для поддиапазонов пилот-сигнала и нулевые значения сигналов для неиспользованных поддиапазонов (например, как показано в таблице), преобразуются во временную область, используя N-точечный ОБПФ, получая N выборок пилот-сигнала,  (0) через (N-1), которые после этого сопрягаются и поставляются N умножителям 542. Каждый умножитель 542 перемножает эту выборку (n-j) с сопряженной ей выборкой пилот-сигнала (j) и поставляет результат на сумматор 544. Сумматор 544 суммирует результаты от всех N умножителей 542 и предоставляет суммированный результат блоку 546. Блок 546 определяет квадрат величины суммированного результата, который предоставляется в качестве значения показателя E
i(n). Значение показателя для каждой антенны может быть выражено следующим образом:
(0) через (N-1), которые после этого сопрягаются и поставляются N умножителям 542. Каждый умножитель 542 перемножает эту выборку (n-j) с сопряженной ей выборкой пилот-сигнала (j) и поставляет результат на сумматор 544. Сумматор 544 суммирует результаты от всех N умножителей 542 и предоставляет суммированный результат блоку 546. Блок 546 определяет квадрат величины суммированного результата, который предоставляется в качестве значения показателя E
i(n). Значение показателя для каждой антенны может быть выражено следующим образом:

Сумматор 564 принимает и суммирует значения показателей для всех T антенн, чтобы обеспечить итоговое значение показателя E(n), которое может быть выражено следующим образом:
E(n)= (3)
(3)
Блок вычисления 550 порога определяет адаптивный порог для использования при обнаружении МДП КАН1 для текущей гипотезы. Каждая из N выборок для накопленного символа пилот-сигнала ОЧРК предоставляется соответствующему блоку 552, который определяет квадрат величины выборки. После этого сумматор 554 суммирует квадраты величин от всех N блоков 552 для обеспечения пороговой величины Y i(n). Сумматор 560 принимает и суммирует пороговые величины для всех T антенн, чтобы обеспечить совокупную пороговую величину Y tot(n), которая может быть выражена в следующем виде:
Y
tot(n)= (4)
(4)
После этого умножитель 562 масштабирует совокупную пороговую величину с масштабным коэффициентом S1, обеспечивая итоговую пороговую величину, которая может быть задана в виде Y(n)=S 1 ·Y tot(n).
Компаратор 570 сравнивает итоговое значение показателя E(n) с итоговой пороговой величиной Y(n) и обеспечивает выходной сигнал детектора D(n), который может быть выражен в следующем виде:
D(n)= (5)
(5)
Если МДП КАН1 обнаружен, то синхронизация символа ОЧРК устанавливается по моменту обнаружения МДП КАН1 (то есть в конкретное значение n, при котором МДП КАН1 был обнаружен).
Масштабный коэффициент S 1 является положительной константой, выбираемой для обеспечения: (1) определенной вероятности пропущенного обнаружения, которая представляет собой вероятность не обнаружения МДП КАН1, который передавался, и (2) определенной вероятности ложных тревог, которая представляет собой вероятность ложного указания на то, что МДП КАН1 был принят при том, что фактически он не передавался. Желательно, чтобы вероятность пропущенного обнаружения была меньше, чем коэффициент ошибок сообщения (MER) так, чтобы MER был обусловлен принятым отношением сигнал-шум (ОСШ) и другими параметрами, а не детектором. MER может быть определен для канала 1, например, величиной в 1 процент или менее. Выходной сигнал детектора может использоваться для определения того, действительно ли принятый МДП КАН1 был обработан для того, чтобы восстановить переданное сообщение КАН1. Определение того, декодировано ли сообщение КАН1 правильно или с ошибкой, может осуществляться на основе значения CRC, содержащегося в сообщении.
Для данного полученного МДП КАН1 это может стать возможным для корреляционного детектора, объявляющего множество обнаружений. Это так потому, что обнаружение может быть объявлено шумом в одном или более символах ОЧРК и в сигнале в других символах ОЧРК для обнаруживаемого МДП КАН1. Например, при P=2, первое обнаружение может произойти с шумом в первом символе ОЧРК и с сигналом во втором символе ОЧРК, и второе обнаружение с большим итоговым значением показателя произойдет, когда второй сигнальный символ ОЧРК позже достигнет одного периода символа ОЧРК. Таким образом, при P>1, детектором можно управлять, продолжая обнаружение для МДП КАН1 дополнительных P-1 периодов символов ОЧРК, отыскивая для МДП наибольший итоговый показатель значения. После этого синхронизация символа ОЧРК устанавливается обнаружением наибольшего итогового показателя значения, а также вычисляются RTD, на основе времени, связанного с этим обнаружением.
Обработка обнаружения может выполняться независимо от обработки сообщения, то есть обработка обнаружения может продолжаться нормальным образом независимо от того, действительно ли обнаружены МДП КАН1. Таким образом, если МДП КАН1 первоначально обнаружен в n-j периодах выборок с итоговым значением показателя E(n-j), и позже обнаруживается другой МДП КАН1 в n периодах выборок с итоговым значением показателя E(n), где E(n)>E(n-j) и j менее размера окна обнаружения, тогда текущая обработка сообщения для МДП КАН1, обнаруженного в n-j периодах выборок, может быть прекращена, и МДП КАН1, обнаруженный в n периоде выборки, может быть обработан вместо этого.
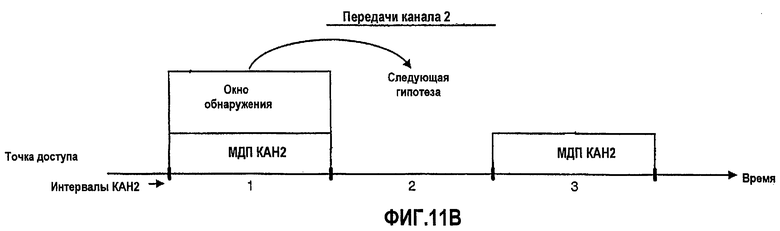
Фиг.11B изображает обработку принятых данных для канала 2, которые содержат временную компенсацию. Обратившись назад к Фиг.10B, увидим, что блоки передатчика осуществляют передачу в определенных интервалах КАН2 и передачи КАН2 содержат временную компенсацию, достигая блока приемника в выбранных границах интервала КАН2. В этом случае, обратившись назад к Фиг.11B, увидим, что блок приемника может обнаружить передачи КАН2 в каждом интервале КАН2 (вместо каждого периода выборки), и окно обнаружения может перемещаться от интервала к интервалу. Для каждого интервала КАН2, который соответствует гипотезе, детектор с управлением по решению обрабатывает выборки, принятые в пределах окна обнаружения, определяя показатель гипотетического МДП КАН2, принятого в этом интервале. Если показатель превышает порог КАН2, то МДП КАН2 считается принятым.
Фиг.7 изображает блок-схему варианта осуществления демодулятора/детектора 420c данных, который также может использоваться для блока 420 с Фиг.4. Демодулятор/детектор 420c данных включает в себя демодулятор 430c данных, используемый для выполнения когерентной демодуляции, и детектор 440c с управлением по решению, используемый для обнаружения МДП КАН2. Выборки для каждой из T приемных антенн предоставляются соответствующему антенному демодулятору 710, находящемуся в пределах демодулятора 430c данных, и соответствующему детектору 750 с управлением по решению, находящемуся в пределах детектора 440c.
Каждый антенный демодулятор 710 одновременно выполняет когерентную демодуляцию одного принятого символа ОЧРК для одной антенны. Для каждого принятого символа ОЧРК блок 712 быстрого преобразования Фурье (БПФ, FFT) принимает выборки x i(n) для символа ОЧРК, удаляет циклический префикс, получая преобразованный символ, и выполняет быстрое преобразование Фурье (БПФ) преобразованного символа, обеспечивая N принятых символов r i(k), которые включают в себя принятые символы данных r i,d(k) и принятые символы пилот-сигнала r i,p(k). После этого, блок оценки канала 720 оценивает ответ канала поддиапазонов данных на основе принятых символов пилот-сигнала r i,p(k). Демодулятор 730 выполняет когерентную демодуляцию принятых символов данных r i,d(k) с оценками канала для обеспечения восстановленных символов данных ŝ i(k).
Накапливающий сумматор 740 символов принимает и накапливает восстановленные символы данных от демодуляторов 710a-710t для T приемных антенн и обеспечивает восстановленные символы ŝ(k). После этого процессор 450 RX данных обрабатывает восстановленные символы ŝ(k), как описано выше применительно к Фиг.4, обеспечивая декодированные данные. В варианте осуществления сообщение КАН2 не включает в себя CRC, и проверка CRC не выполняется процессором RX данных. Затем процессор 310 TX данных обрабатывает декодированные данные, обеспечивая повторно модулированные символы c(k), которые представляют собой оценки переданных символов данных s(k). Обработка процессором 310 включает в себя кодирование, перемежение и преобразование символов, как описано выше применительно к Фиг.3A. Обработка процессором 450 RX данных часто называется просто "декодированием", а обработка процессором 310 TX данных часто называется "повторным кодированием".
Каждый детектор 750 с управлением по решению одновременно выполняет обнаружение для одного принятого символа ОЧРК. Для каждого принятого символа ОЧРК блок 752 БПФ принимает выборки x i(n) для символов ОЧРК и выполняет БПФ над соответствующим преобразованным символом для обеспечения N принятых символов r i(k). Блоки 712 БПФ и 752 обычно реализуются одним блоком БПФ, но для ясности изображаются как два блока на Фиг.7.
Затем детектор 760 сигнала обрабатывает принятые символы пилот-сигнала и символы данных с их ожидаемыми символами для обеспечения показателя E i '(n) для обрабатываемых символов ОЧРК. Блок 770 вычисления адаптивного порога определяет величину адаптивного порога Y i '(n), используемого для определения того, действительно ли МДП КАН2 был принят. Сумматор 780 суммирует пороговые величины для всех T антенн, обеспечивая совокупную пороговую величину Y tot '(n), которая дополнительно масштабируется с масштабным коэффициентом S2 посредством умножителя 782 для того, чтобы получить итоговую пороговую величину Y'(n). Сумматор 784 суммирует значения показателей для всех T антенн, обеспечивая итоговое значение показателя E'(n), которое затем сравнивается с итоговой пороговой величиной Y'(n) при помощи компаратора 790. Выходной сигнал детектора укажет, что если E'(n)>Y'(n), то МДП КАН2 был принят, а в противном случае КАН2 МДП не был принят.
Фиг.8A изображает блок-схему демодулятора данных 430d, который представляет собой один вариант осуществления демодулятора данных 430c, представленного на Фиг.7. Выборки x i(n) для каждой приемной антенны преобразуются блоком 712 БПФ для обеспечения N принятых символов r i(k) для каждого преобразованного символа. Для варианта осуществления, показанного в таблице, N принятых символов включают в себя 28 принятых символов пилот-сигнала для 28 поддиапазонов пилот-сигнала, 24 принятых символа данных для 24 поддиапазонов данных, и 12 дополнительных символов для 12 неиспользованных поддиапазонов. Для простоты, следующее описание предназначено для варианта осуществления, показанного на Фиг.2B, в соответствии с которым N принятых символов включают в себя L+1 принятых символов пилот-сигнала для L+1 поддиапазонов пилот-сигнала и L принятых символов данных для L поддиапазонов данных, причем каждый поддиапазон данных обрамляется с обеих сторон поддиапазонами пилот-сигнала, и индекс k поддиапазона для поддиапазонов пилот-сигнала и поддипазонов данных определяется как k ∈ K, где K={1... 49}.
Когерентная демодуляция каждого из L поддиапазонов данных выполняется первым формированием оценки ответа канала для поддиапазонов данных, используя два поддиапазона пилот-сигнала, обрамляющих поддиапазон данных. Оценка канала ĥ i(k) для k-th поддиапазона данных может быть принята при сложении оценок канала для двух обрамляющих поддиапазонов пилот-сигнала, которая может быть выражена следующим образом:
ĥ i(k)=ĥ i(k-1) + ĥ i(k+1) = p 2 *(k-1)r i(k-1) + p 2 *(k+1)r i(k+1),
где k ∈ K d и i∈ {1 … T}, (6)
где p 2(k) представляет собой символ пилот-сигнала, передаваемый в k-th поддиапазоне для канала 2 и K d представляет набор поддиапазонов данных, то есть K d∈ {2, 4, ... 2L}.
Восстановленные символы данных ŝ i(k) для каждого поддиапазона данных в таком случае могут быть выражены в следующем виде:
ŝ i(k)=ĥ i *(k)·r i(k), где k∈K d и i∈ {1 … T} (7)
Восстановленные символы данных для всех T приемных антенн для каждого поддиапазона данных в таком случае могут быть найдены в виде:
ŝ(k)= где k∈K
d (8)
где k∈K
d (8)
На Фиг.8A оценка канала, показанная в уравнении (6), выполняется L+1 умножителем 722 и L сумматорами 724. Каждый умножитель 722 перемножает принятый символ для соответствующего поддиапазона пилот-сигнала с сопряженным известным символом пилот-сигнала для этого поддиапазона, чтобы обеспечить оценку канала для поддиапазона пилот-сигнала. В таком случае каждый сумматор 724 суммирует оценки канала для двух поддиапазонов пилот-сигнала, обрамляющих соответствующий поддиапазон данных, чтобы обеспечить оценку канала для этого поддиапазона данных. Оценки канала для L поддиапазонов данных также могут быть получены на основе интерполяции или некоторых других способов без выхода за рамки объема изобретения.
Когерентная демодуляция, показанная в уравнении (7), выполняется L умножителями 732. Каждый умножитель 732 перемножает принятый символ r
i(k) для соответствующего поддиапазона данных с сопряженной оценкой канала  для этого поддиапазона, чтобы обеспечить восстановленный символ данных ŝ
i(k) для поддиапазона данных. Типовое накопление для всех T приемных антенн, как показано в уравнении (8), выполняется L сумматорами 742. Каждый сумматор 742 принимает и суммирует T восстановленных символов данных ŝ(k) для T приемных антенн для связанного поддиапазона данных, чтобы обеспечить восстановленный символ ŝ(k) для этого поддиапазона.
для этого поддиапазона, чтобы обеспечить восстановленный символ данных ŝ
i(k) для поддиапазона данных. Типовое накопление для всех T приемных антенн, как показано в уравнении (8), выполняется L сумматорами 742. Каждый сумматор 742 принимает и суммирует T восстановленных символов данных ŝ(k) для T приемных антенн для связанного поддиапазона данных, чтобы обеспечить восстановленный символ ŝ(k) для этого поддиапазона.
Как отмечено выше, мультиплексирование поддиапазона может быть таким, что каждая группа из Q поддиапазонов данных обрамляется с обеих сторон поддиапазонами пилот-сигнала, где Q может быть больше единицы. Если Q>1, то когерентная демодуляция может выполняться несколькими способами. В одном варианте осуществления принятый символ пилот-сигнала для каждого поддиапазона пилот-сигнала используется в качестве когерентной ссылки для двух смежных поддиапазонов данных, и принятые символы данных для этих поддиапазонов данных могут когерентно демодулироваться на основе этого принятого символа пилот-сигнала. В таком случае, для удаления модуляции из только что обнаруженных символов данных могут приниматься и использоваться твердые решения для того, чтобы получить улучшенные оценки канала для следующих двух поддиапазонов данных. Процесс демодуляции может начинаться с конечных поддиапазонов данных (то есть рядом с поддиапазонами пилот-сигнала) и выполняться в направлении среднего поддиапазона данных. Улучшенные оценки канала для поддиапазонов данных, еще более далеких от поддиапазонов пилот-сигнала, могут быть получены, поскольку обнаруживается каждая пара принятых символов данных. В другом варианте осуществления принятые символы пилот-сигнала для каждой пары поддиапазонов пилот-сигнала, подвергаются интерполяции для того, чтобы получить оценку канала для каждого из Q поддиапазонов данных, обрамляющих эти поддиапазоны пилот-сигнала.
Значение CRC часто используют для определения того, было ли принятое сообщение декодировано правильно или с ошибками. В определенных случаях может потребоваться включить значение CRC в сообщение из-за служебного сигнала, связанного со значением CRC и/или по некоторым другим соображениям. В этом случае необходим другой механизм для определения того, действительно ли принятое сообщение достоверно. Для варианта осуществления, показанного на Фиг.7, демодулятором 430c данных и процессором 450 RX данных можно управлять для того, чтобы предоставить декодированное сообщение для каждой гипотезы, а детектором 440c можно управлять для того, чтобы предоставить указание того, действительно ли сообщение было принято для гипотезы.
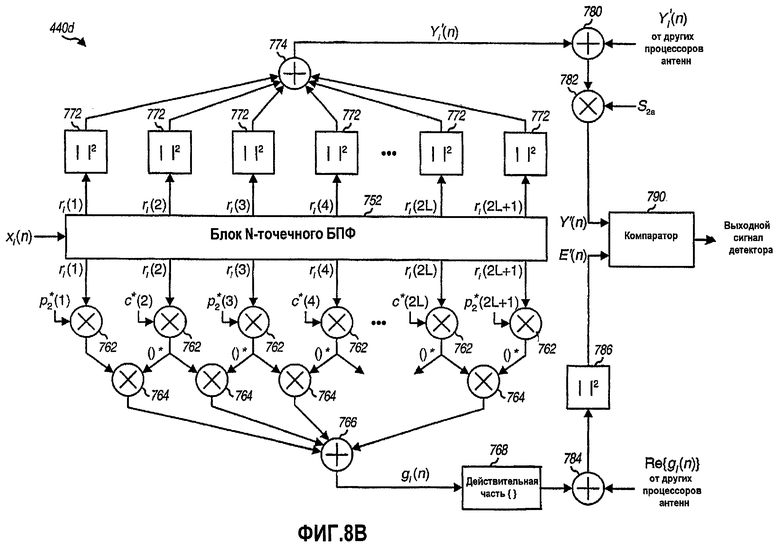
Фиг.8B изображает блок-схему детектора 440d с управлением по решению, который выполняет дифференциальное обнаружение в частотной области и представляет собой один вариант осуществления детектора 440c, представленного на Фиг.7. Выборки x i(n) для каждой приемной антенны преобразуются блоком 752 БПФ для того, чтобы обеспечить N принятых символов r i(k) для каждого преобразованного символа.
Для определения значения показателя E'(n) для каждого преобразованного символа сначала для каждой приемной антенны получают статистику обнаружения g i(n) при помощи суммирования по действительной части 2L скалярных произведений, сформированных при использовании смежных пар поддиапазонов пилот-сигнала и поддиапазонов данных. Статистика обнаружения g i(n) может быть выражена в следующем виде:
g
i(n)= z(k)·z*(k+1), где i∈ {1… T} (9a)
z(k)·z*(k+1), где i∈ {1… T} (9a)
где
z
i(k)=
Показатель значения E'(n) для преобразованного символа в таком случае может быть выражено в следующем виде:
E'(n)= , где i∈ {1 … T} (10a)
, где i∈ {1 … T} (10a)
В альтернативном варианте показатель значения E'(n) может быть выражен в следующем виде:
E'(n)= , где i∈ {1 … T} (10b)
, где i∈ {1 … T} (10b)
На Фиг.8B вычисление статистики обнаружения g i(n), показанное в уравнении (9), выполняется 2L+1 умножителями 762, 2L умножителями 764, и сумматором 766. Каждый умножитель 762 перемножает принятый символ для соответствующего поддиапазона пилот-сигнала или поддиапазона данных с сопряженным известным символом пилот-сигнала или повторно модулированным символом для этого поддиапазона. Каждый умножитель 764 выполняет скалярное произведение выходных сигналов от пары умножителей 762 для пары смежных поддипазона пилот-сигнала и поддиапазона данных. Затем сумматор 766 суммирует выходные сигналы от L умножителей 764, чтобы предоставить статистику обнаружения g i(n). (Для варианта осуществления, показанного в уравнении (10a), блок 768 принимает g i(n), и предоставляет действительную часть сумматору 784, который суммирует действительные части g i(n) для всех T антенн. Затем выходной сигнал с сумматора 784 возводится в квадрат блоком 786, чтобы предоставить показатель значения E'(n). Для варианта осуществления, показанного в уравнении (10b), блок 786 может быть помещен между блоком 768 и сумматором 784.
Блок вычисления 770 адаптивного порога определяет адаптивный порог Y'(n), чтобы использовать его для каждого принятого преобразованного символа. Каждый из 2L+1 принятых символов r i(k) для поддиапазона пилот-сигнала и поддиапазона данных предоставляется соответствующему блоку 772, который определяет квадрат величины символа. Затем сумматор 774 суммирует квадраты величин от всех 2L+1 блоков 772 для того, чтобы обеспечить пороговые величины Y i '(n). Сумматор 780 принимает и суммирует пороговые величины для всех T антенн, обеспечивая совокупную пороговую величину Y' tot(n), которая может быть выражена в следующем виде:
Y'
tot(n)= (11)
(11)
Умножитель 782 масштабирует совокупную пороговую величину с масштабным коэффициентом S 2а, обеспечивая итоговую пороговую величину, которая может быть задана в виде Y'(n)=S 2а·Y' tot(n). Вообще, и пороговое значение Y'(n), и значение показателя E'(n), накапливаются по длительности обнаруженного МДП. Таким образом, если МДП охватывает множество периодов символа ОЧРК, то пороговые величины и значения показателей сперва вычисляются как описано выше для каждого из этих символов ОЧРК и затем накапливаются, обеспечивая итоговые пороговые величины и значения показателей для МДП.
Компаратор 790 сравнивает итоговое значение показателя E'(n) с итоговой пороговой величиной Y'(n) и обеспечивает выходной сигнал детектора D'(n), который может быть выражен в следующем виде:
D'(n)= (12)
(12)
Если выходной сигнал детектора D'(n) указывает, что МДП КАН2 присутствует, то сообщение КАН2, декодированное процессором RX данных, считают достоверным, и оно по обстановке может быть дополнительно обработано контроллером. В противном случае, сообщение КАН2 отвергается.
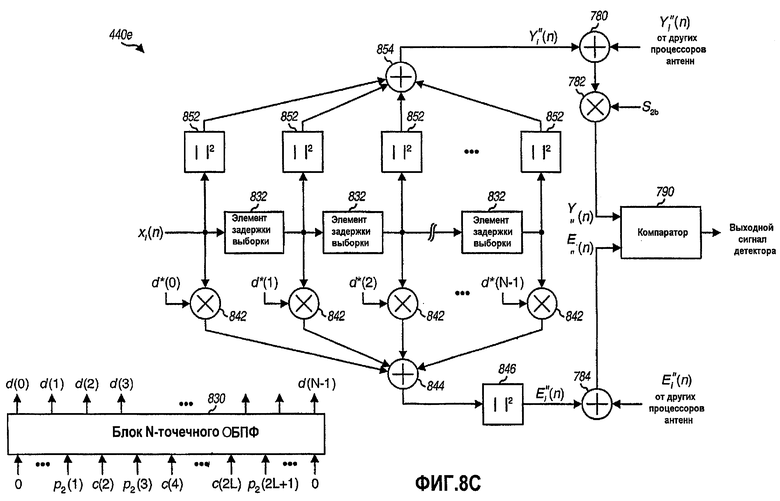
Фиг.8C изображает блок-схему детектора 440e с управлением по решению, который выполняет дифференциальное обнаружение в частотной области и представляет собой один вариант осуществления детектора 440c, представленного на Фиг.7. Выборками x i(n) снабжается линия/буфер 830 задержки, которые реализуются на базе N-1 элементов 832 задержки, каждый из которых обеспечивает один период выборки задержки.
Детектор 440e выполняет корреляцию каждого принятого символа ОЧРК с соответствующим ему "восстановленным" символом ОЧРК, определяя показатель E"(n) для принятого символа ОЧРК. Каждая из N выборок x i(n) для принятого символа ОЧРК предоставляется соответствующему умножителю 842, который также принимает соответствующую сопряженную восстановленную выборку d*(j), где j∈ {0 ... N-1}. Для получения d*(j), символы пилот-сигнала p 2(k) для поддиапазонов пилот-сигнала (например, как показано в таблице), повторно модулированные символы c(k) для поддиапазонов данных, и нулевые значения сигналов для неиспользованных поддиапазонов (то есть N символов для N полных поддиапазонов) для периода символа ОЧРК, преобразуются во временную область N-точечным ОБПФ 830, получая N восстановленных выборок, от d(0) до d(N-1), которые затем сопрягаются и предоставляются N умножителям 842. Операции, выполняемые другими элементами, представленными на Фиг.8C, подобны описанным выше применительно к Фиг.6. Значение показателя E i "(n) для каждой антенны может быть выражено следующим образом:
E
i
"(n)= , где i∈ {1 … T} (13)
, где i∈ {1 … T} (13)
Итоговое значение показателя E i "(n) для всех T антенн в таком случае может быть выражено следующим образом:
E"(n)= , (14)
, (14)
Порог Y"(n), используемый для сравнения с итоговым значением показателя E"(n), может быть определен подобно тому, как описано выше применительно к Фиг.6. В частности, совокупную пороговую величину Y” tot(n) для всех T антенн, которая может быть выражена в следующем виде:
Y”
tot(n)= (15)
(15)
Итоговое пороговое значение в таком случае может задаваться в следующем виде: Y"(n) = S 2b · Y” tot(n).
Для детектора с управлением по решению масштабный коэффициент S 2 (который представляет собой коэффициент S 2a для детектора 440d, представленного на Фиг.8B, и коэффициент S 2b для детектора 440e, представленного на Фиг.8C) является положительной константой, выбираемой для обеспечения: (1) определенной вероятности пропущенного обнаружения МДП КАН2, и (2) определенной вероятности ложных тревог для неправильно объявленного наличия МДП КАН2. Если сообщения КАН2 определяются так, что они не включают в себя значения CRC, то определяя, действительно ли присутствуют сообщения КАН2, полагаются исключительно на детектор. Ошибочные сообщения КАН2 могут быть предоставлены контроллеру по следующим причинам:
- ложная тревога - шум в принятом сигнале ложно запускает обнаружение; и
- неправильное декодирование - сигнал правильно запускает обнаружение, но декодированное сообщение КАН2 включает в себя неисправленные и необнаруженные ошибки.
Если канал 2 используется в качестве канала с произвольным доступом, то сигнал ложной тревоги для МДП КАН2 может заставить систему выделить ресурсы несуществующему пользовательскому терминалу, что в таком случае приводит к пустой трате ресурсов. В этом случае желательно выбирать масштабный коэффициент S 2 таким образом, чтобы свести к минимуму вероятность сигнала ложной тревоги, так как нежелательно иметь шум, часто запускающий пустую трату ресурсов.
Вероятность неправильного декодирования относится к вероятности обнаружения и более высокая вероятность обнаружения может служить причиной увеличения случаев неправильного декодирования. Когда происходит случай неправильного декодирования, ошибочно декодированное сообщение КАН2 предоставляется контроллеру. Контроллер может быть способен проверять достоверность сообщения КАН2 некоторыми другими способами. Например, если сообщение КАН2 включает в себя уникальный идентификатор для пользовательского терминала, передавшего сообщение, то контроллер может визуально проверить, включен ли уникальный идентификатор для восстановленного сообщения КАН2 в список действительных идентификаторов. Если уникальный идентификатор в принятом сообщении КАН2 определен в качестве действительного, то система может выделить ресурсы пользовательскому терминалу, связанному с этим идентификатором.
При выборе масштабного коэффициента S 2 может потребоваться обнаружить настолько много действительных сообщений КАН2, насколько возможно при поддержании вероятностей подачи ложной тревоги и неправильного декодирования ниже определенного уровня. Также можно изменять масштабный коэффициент S 2 на основе загрузки системы. Например, если загрузка системы низка, и существует небольшое количество действительных идентификаторов, то вероятность ошибочного выделения ресурсов системы представляется небольшой. В этом случае может использоваться более низкий порог обнаружения. При увеличении загрузки системы, для уменьшения случаев неправильного декодирования порог обнаружения может быть увеличен.
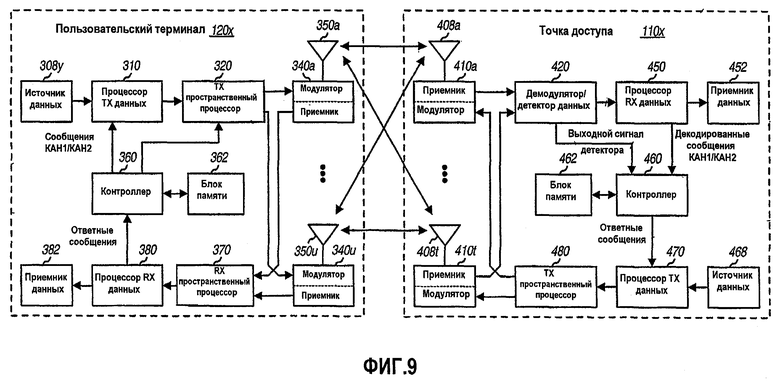
Фиг.9 изображает блок-схему варианта осуществления точки доступа 110x и пользовательского терминала 120x в системе 100. Для этого варианта осуществления как точка доступа 110x, так и пользовательский терминал 120x оборудуются множеством антенн. Вообще, как точка доступа, так и пользовательский терминал могут быть оборудованы любым количеством передающих/приемных антенн.
В пользовательском терминале 120x процессор 310 TX данных по восходящей линии связи принимает и обрабатывает трафик данных от источника 308 данных, а также другие данные (например, для сообщений КАН1 и КАН2) от контроллера 360, обеспечивая мультиплексирование символов данных и символов пилот-сигнала, как описано выше применительно к Фиг.3A. TX пространственный процессор 320 может выполнять пространственную обработку символов пилот-сигнала и символов данных, обеспечивая поток передаваемых символов для каждой антенны. Каждый модулятор 340 принимает и обрабатывает соответствующий поток передаваемых символов, обеспечивая соответствующий модулированный сигнал восходящей линии связи, который затем передается от соответствующей антенны 350.
В точке доступа 110x T антенн (от 408a до 408t) принимают переданные модулированные сигналы восходящей линии связи от пользовательского терминала, и каждая антенна поставляет принятый сигнал на соответствующий приемник 410. Каждый приемник 410 адаптирует принятый сигнал и дополнительно оцифровывает адаптированный сигнал, обеспечивая выборки. Затем, как описано выше, демодулятор/детектор 420 данных выполняет обработку, обнаруживая сообщения КАН1 и КАН2. Процессор 450 RX данных обрабатывает восстановленные символы, обеспечивая поток декодированных данных (который может быть предоставлен приемнику 452 данных для хранения) и восстановленные сообщения КАН1 и КАН2 (которые могут быть предоставлены контроллеру 460 для дополнительной обработки).
Обработка для нисходящей линии связи может являться такой же, или отличной от обработки для восходящей линии связи. Данные от источника 468 данных и служебные сигналы (например, ответные сообщения) от контроллера 460 обрабатываются (например, кодируются, перемежаются и модулируются) процессором 470 TX данных, и могут быть пространственно обработаны TX пространственным процессором 480. Затем переданные от TX пространственного процессора 480 символы обрабатываются модуляторами 410a-410t, чтобы сгенерировать T модулированных сигналов нисходящей линии связи, которые передаются через антенны 408a-408t.
В пользовательском терминале 120x, модулированные сигналы нисходящей линии связи принимаются антеннами 350, адаптируются и оцифровываются приемниками 340, и обрабатываются RX пространственным процессором 370 и процессором 380 RX данных способом, комплиментарным по отношению к выполненному в точке доступа. Декодированные данные для нисходящей линии связи могут быть предоставлены приемнику 382 данных для хранения и/или контроллеру 360 для дальнейшей обработки.
Контроллеры 360 и 460 управляют функционированием различных блоков обработки в пользовательском терминале и точке доступа соответственно. Блоки памяти 362 и 462 хранят данные и программные коды, используемые контроллерами 360 и 460 соответственно.
Для ясности, определенные варианты осуществления корреляции и детекторов с управлением по решению, демодуляторов и блоков приемника, были описаны для определенных форматов МДП. Также без выхода за рамки изобретения возможны различные другие варианты осуществления и использования этих детекторов. Например, корреляционный детектор может использоваться для канала, в соответствии с чем передачи содержат временную компенсацию, а детектор с управлением по решению может использоваться для канала, в соответствии с чем передачи не содержат временную компенсацию.
Детектор с управлением по решению может быть осуществлен в частотной области (как показано на Фиг.8B) или во временной области (как показано на Фиг.8C). Кроме того, детектор с управлением по решению может использоваться для различных форматов МДП. Например, детектор с управлением по решению может использоваться для формата МДП, в соответствии с которым данные и пилот-сигнал являются мультиплексированными по поддиапазону (как описано выше для КАН2 МДП), формата МДП, в соответствии с которым данные и пилот-сигнал содержат временное разделение сигналов (TDM) (как описано выше для КАН1 МДП), и др. Детектор с управлением по решению также может использоваться как с пилот-сигналом, так и без оного. Вообще, детектор с управлением по решению использует принятые символы данных частотной области или восстановленные выборки данных временной области для обнаружения передач данных в принятом сигнале. Этот детектор преимущественно может использоваться для обнаружения ошибок сообщения, когда CRC или другие механизмы обнаружения ошибок не доступны.
Использование адаптивного порога может обеспечить устойчивые параметры обнаружения во многих сценариях функционирования, таких как нелицензированный диапазон частот, в котором могут присутствовать различные источники помех. Порог может быть установлен на основе частной статистики для обнаруженных передач. Эта статистика может иметь отношение к энергии полезного сигнала, шума и помех в передаче, или к некоторым другим параметрам.
Детекторы, демодуляторы и приемники, описанные здесь, могут использоваться для различных типов каналов передачи данных. Например, эти блоки могут использоваться для различных типов каналов с произвольным доступом, таких как те, что подробно описаны в вышеупомянутых заявке на патент US № 60/432,440 и предварительной заявке на патент US № 60/421,309.
Детекторы, демодуляторы и приемники, описанные здесь, также могут использоваться для различных беспроводных систем связи с коллективным доступом. Одна такая система является системой беспроводной связи с коллективным доступом со многими входами и многими выходами (MIMO), описанной в вышеупомянутой предварительной заявке на патент US № 60/421,309. Вообще, эти системы могут использовать или не использовать ОЧРК, либо могут использовать какую бы то ни было другую схему модуляции со многими несущими, вместо ОЧРК, и могут использовать или не использовать MIMO.
Детекторы, демодуляторы и приемники, описанные здесь, могут быть осуществлены при помощи различных средств. Например, эти блоки могут быть осуществлены аппаратными, программными средствами или их комбинацией. Для аппаратного выполнения, детекторы и приемники могут быть осуществлены в пределах одной или более специализированной интегральной микросхемы (ASIC), цифрового сигнального процессора (DSP), цифрового устройства обработки сигналов (DSPD), программируемого логического устройства (PLD), программируемой пользователем вентильной матрицы (FPGA), процессора, контроллера, микроконтроллера, микропроцессора, другого электронного блока, предназначенного для выполнения описанных здесь функций, или комбинации вышеперечисленного.
Для случая программного выполнения обработка сигналов для детекторов, демодуляторов и приемников может быть осуществлена модулями (например, процедурами, функциями и так далее), которые выполняют описанные здесь функции. Программные коды могут храниться в блоке памяти (например, блоки памяти 362 и 462, представленные на Фиг.9) и выполняться процессором (например, контроллерами 360 и 460). Блок памяти может быть осуществлен в процессоре или являться внешним по отношению к процессору, в этом случае он может быть присоединен с возможностью обмена информацией к процессору через различные средства, известные из уровня техники.
Предыдущее описание раскрытых вариантов осуществления предпринято для предоставления любому человеку, являющемуся специалистом в данной области техники, возможности осуществления или использования настоящего изобретения. Различные модификации к этим вариантам осуществления будут очевидны специалистам в данной области техники, и определенные здесь родовые принципы могут быть применены к другим вариантам осуществления, без отступления от сущности или объема изобретения. Таким образом, настоящее изобретение не предназначено для того, чтобы служить ограничением для показанных здесь вариантов осуществления, но должно соответствовать самому широкому объему, совместимому с раскрытыми здесь принципами и новыми признаками.
Изобретение относится к передаче данных, а именно: к способам обнаружения и демодуляции данных в системах беспроводной связи. Технический результат: повышение эффективности обнаружения. Раскрыты способы для обнаружения и демодуляции передач данных в системах беспроводной связи. В одном аспекте детектор с управлением по решению обнаруживает передачи данных в принятом сигнале, используя принятые символы данных, а также принятые символы пилот-сигнала. Детектор с управлением по решению может быть предназначен для выполнения дифференциального обнаружения в частотной области или когерентного обнаружения во временной области, и может использоваться при модуляции со многими несущими (например, ОЧРК). В другом аспекте адаптивный порог используют для выполнения обнаружения принятых передач данных. Порог может быть определен для каждой гипотетически принятой передачи данных. Порог может быть вычислен, например, на основе энергии сигнала и шума гипотетической передачи данных. 7 н. и 30 з.п. ф-лы, 17 ил., 1 табл.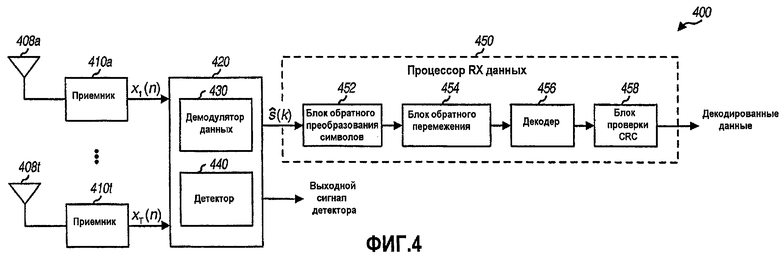
1. Блок приемника в системе беспроводной связи, содержащий
демодулятор, выполненный с возможностью обработки принятых символов данных для обеспечения восстановленных символов;
первый процессор данных, выполненный с возможностью обработки восстановленных символов для обеспечения декодированных данных;
второй процессор данных, выполненный с возможностью обработки декодированных данных для обеспечения повторно модулированных символов; и
детектор, выполненный с возможностью обработки принятых символов данных и повторно модулированных символов для обеспечения выходного сигнала детектора.
2. Блок приемника по п.1, в котором принятые символы данных предназначены для гипотетически принятой передачи данных, и выходной сигнал детектора указывает, действительно ли передачу данных считают принятой.
3. Блок приемника по п.1, дополнительно содержащий
блок вычисления порога, выполненный с возможностью определения порога для использования при передаче данных, причем детектор выполнен с возможностью предоставления показателя на основе принятых символов данных и повторно модулированных символов, и выходной сигнал детектора определяют на основе показателя и порога.
4. Блок приемника по п.3, в котором блок вычисления порога выполнен с возможностью определения порога на основе множества принятых сигналов для множества антенн, и детектор выполнен с возможностью определения показателя на основе множества принятых сигналов.
5. Блок приемника по п.1, в котором детектор дополнительно выполнен с возможностью обработки принятых символов пилот-сигнала для обеспечения выходного сигнала детектора, причем символы данных передаются в поддиапазонах данных, а символы пилот-сигнала передаются в поддиапазонах пилот-сигнала, и поддиапазоны данных мультиплексированы с поддиапазонами пилот-сигнала.
6. Блок приемника по п.5, в котором поддиапазоны данных чередуются с поддиапазонами пилот-сигнала таким образом, что каждый из поддиапазонов данных обрамляется с обеих сторон поддиапазонами пилот-сигнала.
7. Блок приемника по п.1, в котором детектор выполнен с возможностью осуществления когерентного обнаружения во временной области, принятые символы данных получены на основе входных выборок для гипотетически принятой передачи данных, и детектор выполнен с возможностью осуществления корреляции между входными и восстановленными выборками, полученными на основе повторно модулированных символов.
8. Блок приемника по п.1, в котором детектор выполнен с возможностью осуществления дифференциального обнаружения в частотной области.
9. Блок приемника по п.1, в котором детектор выполнен с возможностью обработки принятых символов пилот-сигнала для обеспечения выходного сигнала детектора перемножения каждого из принятых символов данных с соответствующим символом из повторно модулированных символов для обеспечения демодулированного символа данных, перемножения каждого из принятых символов пилот-сигнала с соответствующим символом из известных символов пилот-сигнала для обеспечения демодулированного символа пилот-сигнала, осуществления скалярных произведений между демодулированными символами данных и демодулированными символами пилот-сигнала и накапливания результатов скалярных произведений.
10. Блок приемника в системе беспроводной связи, содержащий процессор, выполненный с возможностью обработки принятых символов данных для гипотетически принятой передачи данных и предоставления повторно модулированных символов, которые являются оценками переданных символов данных; и детектор, выполненный с возможностью обработки принятых символов данных и повторно модулированных символов для обеспечения выходного сигнала детектора, который указывает, действительно ли передачу данных считают принятой.
11. Блок приемника по п.10, в котором процессор выполнен с возможностью демодулирования принятых символов данных для обеспечения восстановленных символов, декодирования восстановленных символов для обеспечения декодированных данных, и повторного кодирования декодированных данных для обеспечения повторно модулированных символов.
12. Блок приемника по п.10, в котором процессор дополнительно выполнен с возможностью обработки принятых символов пилот-сигнала для передачи данных и соответствующих известных символов пилот-сигнала для обеспечения выходного сигнала детектора.
13. Способ приема данных в системе беспроводной связи, заключающийся в том, что
демодулируют принятые символы данных для обеспечения восстановленных символов; обрабатывают восстановленные символы для обеспечения декодированных данных; обрабатывают декодированные данные для обеспечения повторно модулированных символов; и детектируют принятые символы данных и повторно модулированные символы для обеспечения выходного сигнала детектора.
14. Способ по п.13, в котором принятые символы данных предназначены для гипотетически принятой передачи данных, и выходной сигнал детектора указывает, действительно ли передачу данных считают принятой.
15. Способ по п.13, дополнительно заключающийся в определении порога для использования при передаче данных, причем этап детектирования включает в себя предоставление показателя на основе принятых символов данных и повторно модулированных символов, и выходной сигнал детектора определяют на основе показателя и порога.
16. Способ по п.15, в котором этап определении порога включает в себя определение порога на основе множества принятых сигналов для множества антенн, и этап детектирования включает в себя определение показателя на основе множества принятых сигналов.
17. Способ по п.13, в котором этап детектирования включает в себя обработку принятых символов пилот-сигнала для обеспечения выходного сигнала детектора, причем символы данных передаются в поддиапазонах данных, а символы пилот-сигнала передаются в поддиапазонах пилот-сигнала, и поддиапазоны данных мультиплексированы с поддиапазонами пилот-сигнала.
18. Способ по п.17, в котором поддиапазоны данных чередуются с поддиапазонами пилот-сигнала таким образом, что каждый из поддиапазонов данных обрамляется с обеих сторон поддиапазонами пилот-сигнала.
19. Способ по п.13, дополнительно содержащий этап на котором, получают принятые символы данных на основе входных выборок для гипотетически принятой передачи данных, причем этап детектирования включает в себя осуществление когерентного обнаружения во временной области и этап детектирования дополнительно включает в себя осуществление корреляции между входными и восстановленными выборками, полученными на основе повторно модулированных символов.
20. Способ по п.13, в котором этап детектирования включает в себя осуществление дифференциального обнаружения в частотной области.
21. Способ по п.13, в котором этап детектирования включает в себя обработку принятых символов пилот-сигнала для обеспечения выходного сигнала детектора,
перемножение каждого из принятых символов данных с соответствующим символом из повторно модулированных символов для обеспечения демодулированного символа данных, перемножение каждого из принятых символов пилот-сигнала с соответствующим символом из известных символов пилот-сигнала для обеспечения демодулированного символа пилот-сигнала, осуществление скалярных произведений между демодулированными символами данных и демодулированными символами пилот-сигнала, и накапливание результатов скалярных произведений.
22. Способ приема данных в системе беспроводной связи, заключающийся в том, что
обрабатывают принятые символы данных для гипотетически принятой передачи данных и предоставляют повторно модулированные символы, которые являются оценками переданных символов данных; и детектируют принятые символы данных и повторно модулированные символы для обеспечения выходного сигнала детектора, который указывает, действительно ли передачу данных считают принятой.
23. Способ по п.22, в котором этап обработки включает в себя демодулирование принятых символов данных для обеспечения восстановленных символов, декодирование восстановленных символов для обеспечения декодированных данных, и повторное кодирование декодированных данных для обеспечения повторно модулированных символов.
24. Способ по п.22, в котором этап обработки включает в себя обработку принятых символов пилот-сигнала для передачи данных и соответствующих известных символов пилот-сигнала для обеспечения выходного сигнала детектора.
25. Считываемый компьютером носитель, имеющий сохраненные на нем инструкции для выполнения способа по любому из пп.13-24.
26. Устройство приема в системе беспроводной связи, содержащее средство для демодулирования принятых символов данных для обеспечения восстановленных символов; средство для обработки восстановленных символов для обеспечения декодированных данных; средство для обработки декодированных данных для обеспечения повторно модулированных символов; и средство для детектирования принятых символов данных и повторно модулированных символов для обеспечения выходного сигнала детектора.
27. Устройство по п.26, в котором принятые символы данных предназначены для гипотетически принятой передачи данных, и выходной сигнал детектора указывает, действительно ли передачу данных считают принятой.
28. Устройство по п.26, дополнительно содержащее средство для определения порога для использования при передаче данных, причем средство для детектирования включает в себя средство для предоставления показателя на основе принятых символов данных и повторно модулированных символов, и выходной сигнал детектора определяют на основе показателя и порога.
29. Устройство по п.28, в котором средство для определения порога включает в себя средство для определение порога на основе множества принятых сигналов для множества антенн, и средство для детектирования включает в себя средство для определения показателя на основе множества принятых сигналов.
30. Устройство по п.26, в котором средство для детектирования включает в себя средство для обработки принятых символов пилот-сигнала для обеспечения выходного сигнала детектора, причем символы данных передаются в поддиапазонах данных, а символы пилот-сигнала передаются в поддиапазонах пилот-сигнала, и поддиапазоны данных мультиплексированы с поддиапазонами пилот-сигнала.
31. Устройство по п.30, в котором поддиапазоны данных чередуются с поддиапазонами пилот-сигнала таким образом, что каждый из поддиапазонов данных обрамляется с обеих сторон поддиапазонами пилот-сигнала.
32. Устройство по п.26, дополнительно включающее в себя средство для получения принятых символов данных на основе входных выборок для гипотетически принятой передачи данных, причем средство для детектирования включает в себя средство для осуществления когерентного обнаружения во временной области и средство для осуществления корреляции между входными и восстановленными выборками, полученными на основе повторно модулированных символов.
33. Устройство по п.26, в котором средство для детектирования включает в себя средство для осуществления дифференциального обнаружения в частотной области.
34. Устройство по п.26, в котором средство для детектирования включает в себя
средство для обработки принятых символов пилот-сигнала для обеспечения выходного сигнала детектора средство для перемножения каждого из принятых символов данных с соответствующим символом из повторно модулированных символов для обеспечения демодулированного символа данных, средство для перемножения каждого из принятых символов пилот-сигнала с соответствующим символом из известных символов пилот-сигнала для обеспечения демодулированного символа пилот-сигнала, средство для осуществления скалярных произведений между демодулированными символами данных и демодулированными символами пилот-сигнала, и
средство для накапливания результатов скалярных произведений.
35. Устройство приема в системе беспроводной связи, содержащее средство для обработки принятых символов данных для гипотетически принятой передачи данных и средство для предоставления повторно модулированных символов, которые являются оценками переданных символов данных; и средство для детектирования принятых символов данных и повторно модулированных символов для обеспечения выходного сигнала детектора, который указывает, действительно ли передачу данных считают принятой.
36. Устройство по п.35, в котором средство для обработки и средство для предоставления включают в себя средство для демодулирования принятых символов данных для обеспечения восстановленных символов, средство для декодирования восстановленных символов для обеспечения декодированных данных, и средство для повторного кодирования декодированных данных для обеспечения повторно модулированных символов.
37. Устройство по п.35, в котором средство для обработки и средство для предоставления включают в себя средство для обработки принятых символов пилот-сигнала для передачи данных и соответствующих известных символов пилот-сигнала для обеспечения выходного сигнала детектора.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Устройство для приема дискретной информации с исправлением ошибок | 1980 |
|
SU919119A1 |
| Система передачи данных по каналам с обратной связью | 1980 |
|
SU966923A1 |
| US 5959965 А, 28.09.1999. | |||

