Уровень техники
Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к обмену данными и, более конкретно, к методикам выполнения обнаружения сигнала в системе беспроводной связи.
Уровень техники
В системе связи базовая станция обрабатывает (к примеру, кодирует и выполняет символьное преобразование) данные для получения символов модуляции и дополнительно обрабатывает символы модуляции для генерирования модулированного сигнала. Затем базовая станция передает модулированный сигнал посредством канала связи. Система может использовать схему передачи, посредством которой данные передаются в кадрах, при этом каждый кадр имеет конкретную продолжительность. Различные типы данных (к примеру, данные трафика и пакетные данные, служебные и управляющие данные и т.п.) могут отправляться в различных частях каждого кадра.
Беспроводной терминал в системе может знать о том, какие базовые станции рядом с ним (если таковые имеются) осуществляют передачу. Более того, терминал может не знать о начале каждого кадра для данной базовой станции, времени передачи каждого кадра базовой станцией или задержке на распространения, создаваемой в канале связи. Терминал осуществляет обнаружение сигнала для распознавания передач от базовых станций в системе и синхронизации по времени и частоте с каждой интересующей распознанной базовой станцией. Посредством процесса обнаружения сигнала терминал может установить синхронизацию каждой распознанной базовой станции и надлежащим образом выполнить соответствующую демодуляцию для этой базовой станции.
Базовые станции типично расходуют системные ресурсы на поддержку обнаружения сигнала с сигналом, и терминалы также потребляют ресурсы для выполнения обнаружения сигнала. Поскольку обнаружение сигнала - это дополнительные служебные данные, необходимые для передачи данных, желательно минимизировать объем ресурсов, используемый базовыми станциями и терминалами при обнаружении сигнала.
Следовательно, в данной области техники существует потребность в методиках эффективного выполнения обнаружения сигнала с сигналом в системе беспроводной связи.
Сущность изобретения
В данном документе описываются методики эффективного выполнения обнаружения сигнала в системе беспроводной связи. В варианте осуществления каждая базовая станция передает два пилот-сигнала, мультиплексированных с частотным разделением каналов (TDM). Первый пилот-сигнал TDM (или "TDM пилот-сигнал 1") состоит из нескольких экземпляров последовательности пилот-сигнала 1, которая генерируется с помощью первой последовательности псевдослучайных чисел (PN) (или PN1-последовательности). Каждый экземпляр последовательности пилот-сигнала 1 - это копия или реплика последовательности пилот-сигнала 1. Второй пилот-сигнал TDM (или "TDM пилот-сигнал 2") состоит из нескольких экземпляров последовательности пилот-сигнала 2, которая генерируется с помощью второй PN-последовательности (или PN2-последовательности). Каждой базовой станции назначается конкретная PN2-последовательность, которая уникально идентифицирует базовую станцию из соседних базовых станций. Для снижения объема вычислений при обнаружении сигнала с сигналом доступные PN2-последовательности в системе могут упорядочиваться в M1 наборов. Каждый набор содержит M2 PN2-последовательностей и ассоциативно связан с другой PN1-последовательностью. Таким образом, в системе доступно M1 PN1-последовательностей и M1•M2 PN2-последовательностей.
Терминал может использовать TDM пилот-сигнал 1 для обнаружения наличия сигнала, получения синхронизации и оценки погрешности частоты. Терминал может использовать TDM пилот-сигнал 2 для идентификации конкретной базовой станции, передающей TDM пилот-сигнал 2. Использование двух TDM пилот-сигналов для обнаружения сигналов и синхронизации по времени позволяет уменьшить объем обработки, необходимой для обнаружения сигнала.
В варианте осуществления обнаружения сигналов терминал выполняет корреляцию с задержкой принимаемых выборок в каждом периоде выборки, вычисляет показатель корреляции с задержкой для периода выборки и сравнивает этот показатель с первым порогом для определения того, присутствует ли сигнал. Если сигнал обнаружен, то терминал получает приблизительную синхронизацию на основе пика корреляции с задержкой. После этого терминал выполняет прямую корреляцию для принимаемых выборок с PN1-последовательностями для K1 различных сдвигов по времени в рамках окна неопределенности и идентифицирует K2 наиболее мощных экземпляров TDM пилот-сигналов 1, где K1>1 и K2>1. Если каждая PN1-последовательность ассоциативно связана с M2 PN-последовательностями, то каждый экземпляр обнаруженного TDM пилот-сигнала 1 ассоциативно связывают с M2 гипотезами пилот-сигналов 2. Каждая гипотеза пилот-сигнала 2 соответствует конкретному сдвигу по времени и конкретной PN2-последовательности для TDM пилот-сигнала 2.
В варианте осуществления для синхронизации по времени терминал выполняет прямую корреляцию для принимаемых выборок с PN2-последовательностями различных гипотез пилот-сигналов 2 для обнаружения TDM пилот-сигнала 2. Терминалу требуется оценить только M2 PN-последовательностей для каждого экземпляра обнаруженного TDM пилот-сигнала 1 вместо M1•M2 вероятных PN2-последовательностей. Терминал вычисляет показатель прямой корреляции для гипотезы пилот-сигнала 2 и сравнивает этот показатель со вторым порогом для определения того, присутствует ли TDM пилот-сигнал 2. Для каждого экземпляра обнаруженного TDM пилот-сигнала 2 базовая станция, передающая TDM пилот-сигнал 2, идентифицируется на основе PN2-последовательности для гипотезы пилот-сигнала 2, и синхронизация для базовой станции задается посредством смещения по времени для гипотезы.
Далее подробно описаны различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Признаки и характер настоящего изобретения станут более явными из изложенного ниже подробного описания, рассматриваемого вместе с чертежами, на которых одинаковые символы ссылок определяются соответствующим образом по всему документу.
Фиг.1 иллюстрирует сеть беспроводной связи.
Фиг.2A иллюстрирует TDM пилот-сигналы 1 и 2, генерируемые во временной области.
Фиг.2B иллюстрирует TDM пилот-сигналы 1 и 2, генерируемые в частотной области.
Фиг.3A иллюстрирует синхронную передачу пилот-сигналов по линии прямой связи.
Фиг.3B иллюстрирует смещенную передачу пилот-сигналов по линии прямой связи.
Фиг.3C иллюстрирует асинхронную передачу пилот-сигналов по линии прямой связи.
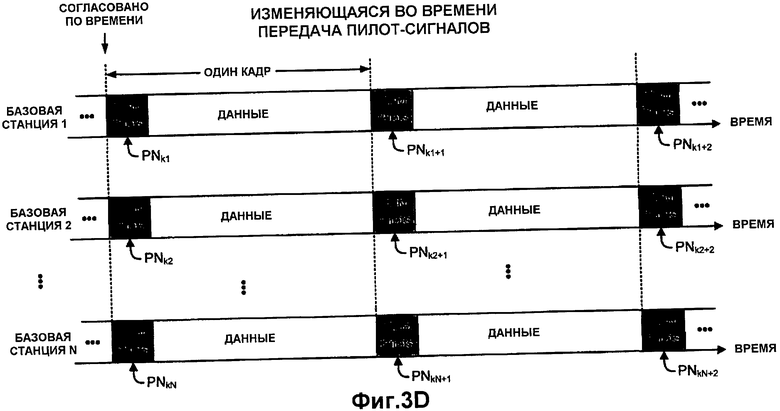
Фиг.3D иллюстрирует изменяющуюся во времени передачу пилот-сигналов по линии прямой связи.
Фиг.4 иллюстрирует процесс, выполняемый терминалом при обнаружении сигнала.
Фиг.5 иллюстрирует блок-схему базовой станции и терминала.
Фиг.6 иллюстрирует процесс передаваемых (TX) пилот-сигналов в базовой станции.
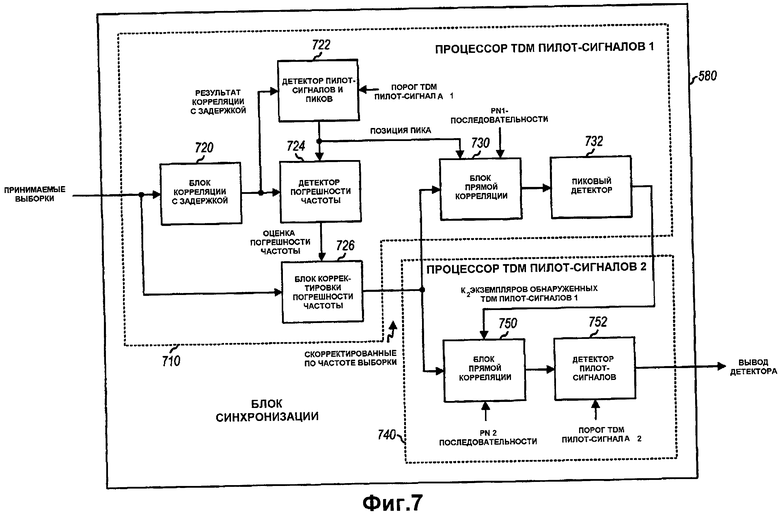
Фиг.7 иллюстрирует блок синхронизации в терминале.
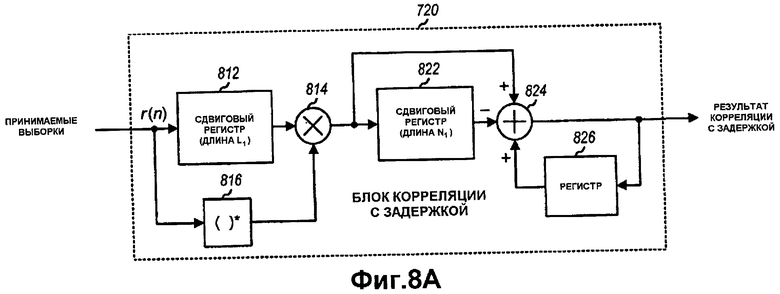
Фиг.8A иллюстрирует блок корреляции с задержкой для TDM пилот-сигнала 1.
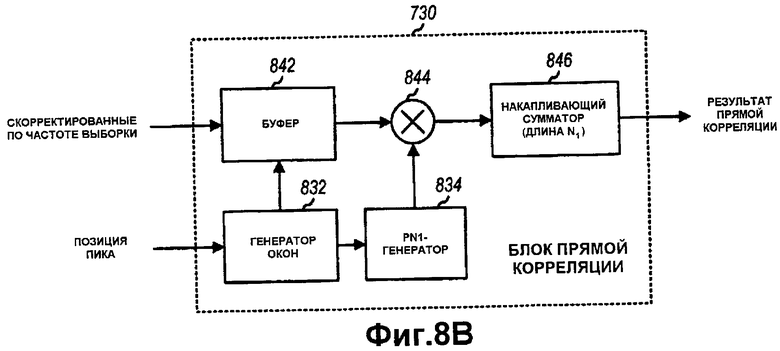
Фиг.8B иллюстрирует блок прямой корреляции для TDM пилот-сигнала 1.
Подробное описание изобретения
Слово "примерный" используется в данном документе, чтобы обозначать "служащий в качестве примера, отдельного случая или иллюстрации". Любой вариант осуществления или проект, описанный в данном документе как "типичный", не обязательно должен быть истолкован как предпочтительный или преимущественный по сравнению с другими вариантами осуществления или проектами.
Описанные в данном документе методики обнаружения сигнала могут использоваться в системах связи с одной несущей и с несколькими несущими. Более того, один или более TDM пилот-сигналов могут использоваться для упрощения обнаружения сигнала. Для простоты конкретные аспекты методик описываются ниже для конкретной схемы передачи TDM пилот-сигналов в системе с несколькими несущими, которая использует ортогональное частотное разделение каналов (OFDM). OFDM - методика модуляции с несколькими несущими, которая эффективно разделяет общую полосу частот системы на несколько (NF) ортогональных частотных поддиапазонов. Эти поддиапазоны также называются тонами, поднесущими, элементами разрешения и частотными каналами. В OFDM каждый поддиапазон ассоциативно связан с соответствующей поднесущей, которая может быть модулирована с помощью данных.
Фиг.1 иллюстрирует систему 100 беспроводной связи. Система 100 включает в себя определенное число базовых станций 110, которые поддерживают обмен данными для ряда беспроводных терминалов 120. Базовая станция - это стационарная станция, используемая для обмена данными с терминалами, и она может также указываться как точка доступа, узел B или каким-либо другим термином. Терминалы 120 распределены по системе, и каждый терминал может быть стационарным или мобильным. Терминал также может упоминаться как мобильная станция, абонентское оборудование (UE), устройство беспроводной связи или каким-либо другим термином. Каждый терминал может обмениваться данными с одной или несколькими базовыми станциями по линии прямой и обратной связи в любой данный момент времени. Линия прямой связи (или нисходящая линия связи) относится к линии связи от базовых станций к терминалам, а линия обратной связи (или восходящая линия связи) относится к линии связи от терминалов к базовым станциям. Для простоты фиг.1 показывает только передачу по линии прямой связи.
Каждая базовая станция 110 предоставляет покрытие связи для соответствующей географической зоны. Термин "сота" может относиться к базовой станции или ее области охвата (покрытия) в зависимости от контекста, в котором используется термин. Для повышения пропускной способности область покрытия каждой базовой станции может быть разбита на несколько секторов (к примеру, три сектора). Каждый сектор может обслуживаться соответствующей базовой приемо-передающей подсистемой (BTS). Термин "сектор" может относиться к BTS или ее области покрытия, в зависимости от контекста, в котором используется термин. Для разбитой на секторы соты базовая станция типично включает в себя BTS всех секторов этой соты. Для простоты в последующем описании термин "базовая станция" используется обобщенно для стационарной станции, которая обслуживает соту, и стационарной станции, которая обслуживает сектор. Таким образом, "базовая станция" в последующем описании может быть предназначена для соты или сектора, в зависимости от того, имеет система не разбитые на секторы или разбитые на секторы соты соответственно.
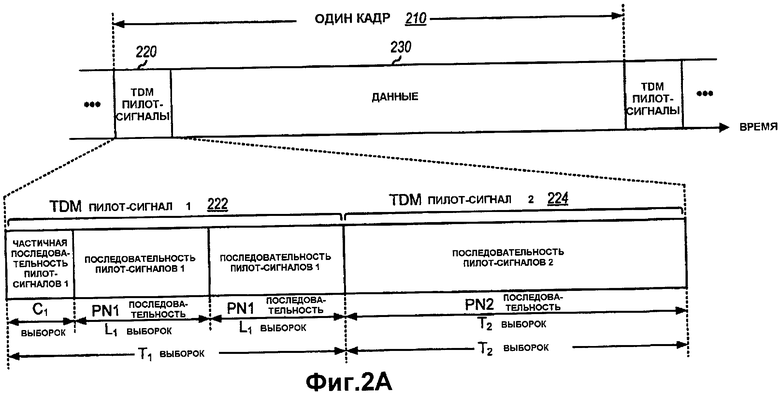
Фиг.2A иллюстрирует примерную схему передачи пилот-сигналов и данных по линии прямой связи в системе 100. Каждая базовая станция передает данные и пилот-сигналы в кадрах, причем каждый кадр 210 имеет заранее определенную продолжительность. Кадр также может упоминаться как временной интервал или каким-либо другим термином. В варианте осуществления каждый кадр 210 включает в себя поле 220 для TDM пилот-сигналов и поле 230 для данных. В общем, кадр может включать в себя любое число полей для любого типа передачи. Интервал передачи относится к интервалу времени, в течение которого TDM пилот-сигналы передаются один раз. В общем, интервал передачи может иметь фиксированную продолжительность (к примеру, кадр) или переменную продолжительность.
Для варианта осуществления, показанного на фиг.2A, поле 220 включает в себя подполе 222 для TDM пилот-сигнала 1 и подполе 224 для TDM пилот-сигнала 2. TDM пилот-сигнал 1 имеет общую длину T1 выборок и содержит S1 идентичных последовательностей пилот-сигналов 1, где, в общем, S1≥1. TDM пилот-сигнал 2 имеет общую длину в T2 выборок и содержит S2 идентичных последовательностей пилот-сигналов 2, где, в общем, S2≥1. Таким образом, может быть один или несколько экземпляров последовательностей пилот-сигналов 1 для TDM пилот-сигнала 1 и одна или несколько последовательностей пилот-сигналов 2 для TDM пилот-сигнала 2. TDM пилот-сигналы 1 и 2 могут генерироваться во временной области или частотной области (к примеру, с помощью OFDM).
Фиг.2A также иллюстрирует вариант осуществления TDM пилот-сигналов 1 и 2, генерируемых во временной области. Для этого варианта осуществления каждая последовательность пилот-сигналов 1 генерируется с помощью PN1-последовательности, имеющей L1 элементарных PN-сигналов, где L1>1. Каждый элементарный PN-сигнал может принимать значение +1 или -1 и передается в одном периоде выборки и элементарного сигнала. TDM пилот-сигнал 1 содержит S1 полных последовательностей пилот-сигналов 1, и если S1•L1<T1, то частичную последовательность пилот-сигналов 1 длины C1, где C1=T1-S1•L1. Общая длина TDM пилот-сигнала 1, таким образом, составляет T1=S1•L1+C1. Для варианта осуществления, показанного на фиг.2A, TDM пилот-сигнал 2 содержит одну полную последовательность пилот-сигналов 2, сгенерированную с помощью PN2-последовательности длины T2. В общем, TDM пилот-сигнал 2 может содержать S2 полных последовательностей пилот-сигналов 2, сгенерированных с помощью PN2-последовательности длины L2, и если S2•L2<T2, то частичную последовательность пилот-сигналов 2 длины C2, где C2=T2-S2•L2. В таком случае общая длина TDM пилот-сигнала 2 составляет T2=S2•L2+C2.
При использовании в данном документе PN-последовательностью может быть любая последовательность элементарных сигналов, которая может быть сгенерирована любым способом и предпочтительно имеет хорошие свойства корреляции. Например, PN-последовательность может генерироваться с помощью порождающего полинома, как известно в данной области техники. PN-последовательностью для каждой базовой станции (к примеру, каждого сектора) также может быть код скремблирования, используемый для перемешивания данных. В этом случае TDM пилот-сигналы могут генерироваться посредством применения кода скремблирования к последовательности из всех единиц или всех нулей.
Фиг.2B иллюстрирует вариант осуществления TDM пилот-сигналов 1 и 2, генерируемых в частотной области с помощью OFDM. Для этого варианта осуществления TDM пилот-сигнал 1 содержит L1 символов пилот-сигнала, которые передаются по L1 поддиапазонам, один символ пилот-сигнала на поддиапазон, используемый для TDM пилот-сигнала 1. L1 поддиапазонов равномерно распределены по общему числу NF поддиапазонов и равномерно разнесены на S1 поддиапазонов, где S1=NF/L1 и S1≥1. Например, если NF=512, L1=256 и S1=2, то 256 символов пилот-сигнала передается по 256 поддиапазонам, которые разнесены на два поддиапазона. Другие значения также могут быть использованы для NF, L1 и S1. L1 символов пилот-сигнала для L1 поддиапазонов и NF-L1 значений сигнала нуля для оставшихся поддиапазонов преобразуются во временную область с помощью NF-точечного обратного дискретного преобразования Фурье (IDFT) для генерирования "преобразованного" символа, который содержит NF выборок временной области. Этот преобразованный символ имеет S1 идентичных последовательностей пилот-сигналов 1, причем каждая последовательность пилот-сигналов 1 содержит L1 выборок временной области. Последовательность пилот-сигналов 1 также может быть сгенерирована посредством выполнения L1-точечного IDFT над L1 символов пилот-сигнала для TDM пилот-сигнала 1. В OFDM C самых правых выборок преобразованного символа часто копируются и присоединяются в начало преобразованного символа для генерирования OFDM-символа, который содержит NF+C выборок. Повторяющаяся часть часто называется цикличным префиксом и используется для преодоления межсимвольных помех (ISI). Например, если NF=512 и C=32, то каждый OFDM-символ содержит 544 выборки. Другие структуры поддиапазонов OFDM с различным общим числом поддиапазонов и длины цикличного префикса также могут использоваться.
PN1-последовательность может применяться в частотной области посредством умножения L1 символов пилот-сигнала с L1 элементарными сигналами PN1-последовательности. PN1-последовательность также может применяться во временной области посредством умножения L1 выборок временной области для каждой последовательности пилот-сигналов 1 с L1 элементарными сигналами PN1-последовательности.
TDM пилот-сигнал 2 может генерироваться в частотной области способом, аналогичным вышеописанному для TDM пилот-сигнала 1. Для TDM пилот-сигнала 2 L2 символов пилот-сигнала передается по L2 поддиапазонам, равномерно разнесенным на S2 поддиапазонов, где S2=N/L2 и S2≥1. PN2-последовательность может применяться во временной или частотной области. Если TDM пилот-сигналы 1 и 2 сгенерированы в частотной области, то последовательности пилот-сигналов 1 и пилот-сигналов 2 содержат комплексные значения вместо ±1. Для показанного на фиг.2B варианта осуществления TDM пилот-сигналы 1 и 2 отправляют в рамках одного OFDM-символа. В общем, каждый TDM пилот-сигнал может включать в себя любое число OFDM-символов.
Соседние базовые стации могут использовать одинаковые или различные PN1-последовательности для TDM пилот-сигнала 1. Набор из M1 PN1-последовательностей может быть сформирован, и каждая базовая станция может использовать любую из M1 PN1-последовательностей в этом наборе. Для снижения сложности M1 может выбираться равным небольшому положительному числу. В варианте осуществления соседние базовые станции используют различные PN2-последовательности для TDM пилот-сигнала 2, и PN2-последовательность для каждой базовой станции используется для уникальной идентификации этой базовой станции из соседних базовых станций.
Для снижения объема вычислений при обнаружении сигнала каждая PN1-последовательность может быть ассоциативно связана с различным набором из M2 PN2-последовательностей. В таком случае доступен составной набор из M1•M2 различных PN2-последовательностей. Каждой базовой станции может назначаться одна из PN2-последовательностей в составном наборе, а также PN1-последовательность, ассоциативно связанная с PN2-последовательностью, назначенной базовой станции. Каждая базовая станция, таким образом, использует пару PN1- и PN2-последовательностей, которая отличается от пар PN1- и PN2-последовательностей, используемых соседними базовыми станциями. M1 и M2 могут выбираться имеющими небольшие значения для снижения сложности, но при этом достаточно большие для обеспечения того, что терминалы не будут обнаруживать две базовые станции с одинаковой PN2-последовательностью (к примеру, M1•M2=256).
Терминал может использовать TDM пилот-сигнал 1 для обнаружения наличия сигнала, получения приблизительной синхронизации и оценки погрешности частоты. Терминал может использовать TDM пилот-сигнал 2 для идентификации конкретной базовой станции, передающей TDM пилот-сигнал 2, и получения более точной синхронизации (или синхронизации по времени). Использование двух отдельных TDM пилот-сигналов для обнаружения сигналов и синхронизации по времени позволяет снижать объем обработки, требуемой для обнаружения сигнала, как описано выше. Продолжительность или длина каждого TDM пилот-сигнала может выбираться на основе компромисса между производительностью обнаружения и объемом служебных данных, требуемых для этого TDM пилот-сигнала. В варианте осуществления TDM пилот-сигнал 1 содержит две полные последовательности пилот-сигналов 1, причем каждая из них имеет длину в 256 элементарных сигналов (или S1=2 и L1=256), а TDM пилот-сигнал 2 содержит одну полную последовательность пилот-сигналов 2 длиной 512 или 544 элементарных сигнала (или S2=1 и L2=544 для фиг.2A, и L2=512 для фиг.2B). В общем, TDM пилот-сигнал 1 может содержать любое число последовательностей пилот-сигналов 1, которые могут иметь любую длину, и TDM пилот-сигнал 2 также может содержать любое число последовательностей пилот-сигналов 2, которые также могут иметь любую длину.
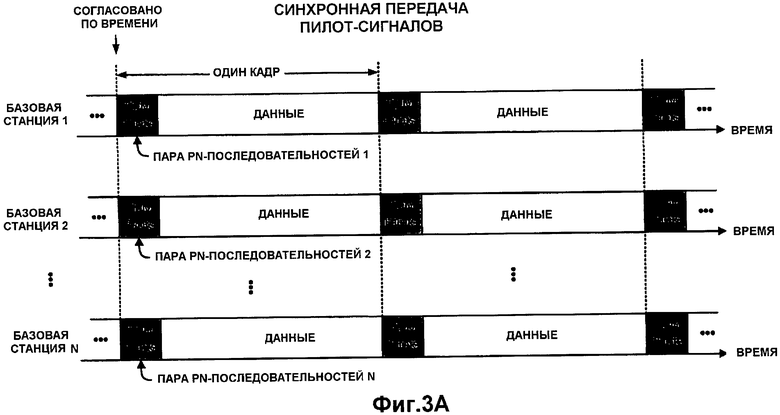
Фиг.3A иллюстрирует схему синхронной передачи пилот-сигналов по линии прямой связи. Для этой схемы базовые станции в системе являются синхронными и передают свои TDM пилот-сигналы примерно в одно время. Терминал может принимать TDM пилот-сигналы от всех базовых станций примерно в одно время с перекосом синхронизации между базовыми станциями вследствие разницы в задержках на распространение и, возможно, других факторов. Посредством синхронизации TDM пилот-сигналов от различных базовых станций помехи посредством TDM пилот-сигналов от одной базовой станции на передачи данных другими базовыми станциями устраняются, что позволяет повысить производительность обнаружения данных. Более того, помехи от передач данных на TDM пилот-сигналы также устраняются, что позволяет повысить производительность обнаружения сигнала.
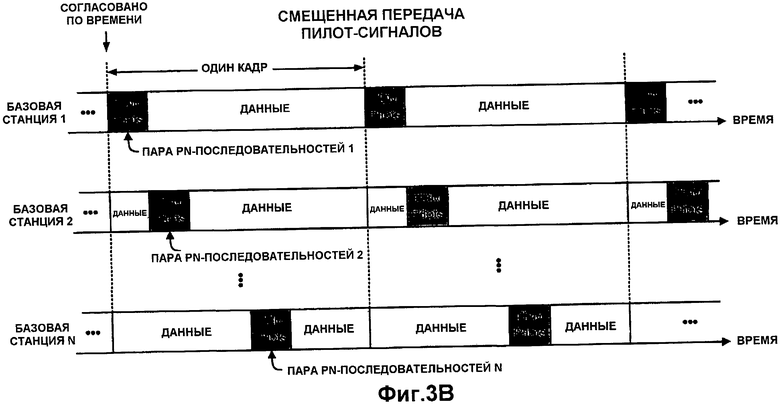
Фиг.3B иллюстрирует схему смещенной передачи пилот-сигналов по линии прямой связи. Для этой схемы базовые станции в системе являются синхронными, но выполняют передачу своих TDM пилот-сигналов в различное время, так чтобы TDM пилот-сигналы смещались. Базовые станции могут идентифицироваться посредством времени, в которое они передают свои TDM пилот-сигналы. Одна PN-последовательность может использоваться для всех базовых станций, и обработка для обнаружения сигнала может существенно снижаться, поскольку все базовые станции используют одну PN-последовательность. В этой схеме передача пилот-сигналов от каждой базовой станции сталкивается с помехами передач данных от соседних базовых станций.
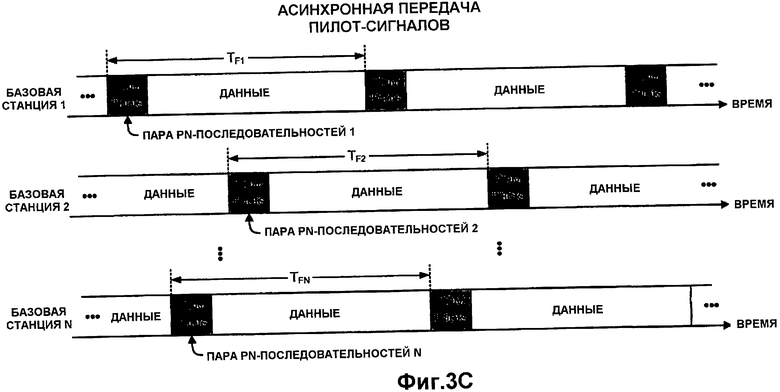
Фиг.3A иллюстрирует схему асинхронной передачи пилот-сигналов по линии прямой связи. Для этой схемы базовые станции в системе являются асинхронными, и каждая базовая станция передает свои TDM пилот-сигналы на основе своей синхронизации. TDM пилот-сигналы от различных базовых станций, таким образом, могут поступать в терминал в различное время.
В схеме синхронной передачи пилот-сигналов, показанной на фиг.3A, передача TDM пилот-сигналов от каждой базовой станции может сталкиваться с одинаковыми помехами от передач TDM пилот-сигналов от соседних базовых станций в каждом кадре. В этом случае усреднение TDM пилот-сигналов по нескольким кадрам не предоставляет усреднение усиления, поскольку одинаковые помехи присутствуют в каждом кадре. Помехи могут варьироваться за счет изменения TDM пилот-сигналов в кадрах.
Фиг.3D иллюстрирует схему изменяющейся во времени передачи пилот-сигналов по линии прямой связи. В этом схеме каждой базовой станции назначается набор из MB PN1-последовательностей для TDM пилот-сигнала 1, где MB>1. Каждая базовая станция использует одну PN1-последовательность для TDM пилот-сигнала 1 по каждому кадру и циклически проходит через MB PN1-последовательностей в MB кадров. Различным базовым станциям назначаются различные наборы из MB PN1-последовательностей.
Набор из MB PN1-последовательностей для каждой базовой станции может рассматриваться как "длинный код", который охватывает несколько кадров. Каждая из MB PN1-последовательностей может рассматриваться как сегмент длинного кода и может генерироваться с помощью различного порождающего полинома длинного кода. Для снижения сложности обработки в приемном устройстве один длинный код может использоваться по всем базовым станциям, и каждой базовой станции может назначаться различный сдвиг длинного кода. Например, базовой станции i может быть назначен сдвиг длинного кода в ki, где ki находится в диапазоне от 0 до MB-1. PN1-последовательности базовой станции i, начиная с указанного кадра, в таком случае задаются как: PN1ki, PN1ki+1, PN1ki+2 и т.д. Обнаружение данной PN1-последовательности или сдвига длинного кода наряду с кадром, в котором обнаружена PN1-последовательность относительно указанного кадра, позволяет идентифицировать набор PN1-последовательностей, которому принадлежит обнаруженная PN1-последовательность.
В общем, повышенная производительность обнаружения сигнала может достигаться, если все базовые станции в системе синхронизированы и передают свои TDM пилот-сигналы одновременно. Тем не менее это не является обязательным условием, и все или поднабор базовых станций в системе может быть асинхронным. Для простоты в большей части последующего описания предполагается, что базовые станции являются синхронными.
Фиг.2A и 2B иллюстрируют использование двух TDM пилот-сигналов или TDM пилот-сигналов 1 и 2. В общем, любое количество TDM пилот-сигналов может быть использовано для упрощения обнаружения сигнала терминалами. Каждый TDM пилот-сигнал может быть ассоциативно связан с различным набором PN-последовательностей. Иерархическая структура может быть использована для PN-последовательностей. Например, TDM пилот-сигнал 1 может быть ассоциативно связан с M1 возможных PN1-последовательностей (или M1 возможных наборов PN1-последовательностей), каждая PN1-последовательность может быть ассоциативно связана с M2 возможных PN2-последовательностей, каждая PN2-последовательность может быть ассоциативно связана с M3 возможных PN3-последовательностей и т.д. Каждая PN1-последовательность может назначаться значительному числу базовых станций в системе, каждая PN2-последовательность может назначаться меньшему числу базовых станций и т.д. В общем, каждый TDM пилот-сигнал может генерироваться с PN-последовательностью или без PN-последовательности. Для простоты в последующем описании предполагается использование двух TDM пилот-сигналов, сгенерированных с помощью двух PN-последовательностей, выбранных из двух различных наборов PN-последовательностей.
Терминал выполняет различную обработку для обнаружения сигнала и синхронизации по времени. Использование двух различных PN-последовательностей для TDM пилот-сигналов 1 и 2 позволяет терминалу разделить обработку этих двух задач, как описано ниже.
1. Корреляция с задержкой для TDM пилот-сигнала 1
В терминале принимаемая выборка для каждого периода выборки может быть выражена как:
r(n) =h(n)
 s(n)+w(n)=y(n)+w(n), уравнение (1)
s(n)+w(n)=y(n)+w(n), уравнение (1)
где n - это индекс периода выборки;
s(n) - это выборка временной области, отправленная базовой станцией в периоде выборки n;
h(n) - это совокупное канальное усиление, обнаруживаемое выборкой s(n);
r(n) - это принимаемая выборка, полученная терминалом в периоде выборки n;
w(n) - это шум для периода выборки n;
y(n)=h(n)
 s(n); и
s(n); и
обозначает операцию свертывания.
TDM пилот-сигнал 1 - это периодический сигнал, состоящий из S1 экземпляров последовательности пилот-сигналов 1. Терминал может выполнять корреляцию с задержкой для обнаружения наличия базового периодического сигнала (к примеру, TDM пилот-сигнала 1) в принимаемом сигнале. Корреляция с задержкой может быть выражена следующим образом:

где C(n) - это результат корреляции с задержкой для периода выборки n;
N1 - это длина или продолжительность корреляции с задержкой; и
"*" обозначает комплексно сопряженное число.
Длина корреляции с задержкой (N1) может быть задана равной общей длине TDM пилот-сигнала 1 (T1) минус длина последовательности пилот-сигналов 1 (L1) и минус допустимое искажение сигнала (Q1), учитывающее ISI-эффекты по фронту TDM пилот-сигнала 1, или N1=T1-L1-Q1. Для варианта осуществления, показанного на фиг.2A и 2B, когда TDM пилот-сигнал 1 содержит две последовательности пилот-сигналов 1, длина корреляции с задержкой N1 может быть задана равной длине последовательности пилот-сигналов 1 или N1=L1.
Уравнение (2) вычисляет корреляцию между двумя принимаемыми выборками r(n-i) и r(n-i-L1), которые разнесены на L1 периодов выборки, что равно длине последовательности пилот-сигналов 1. Эта корреляция, c(n-i)=r*(n-i)•r(n-i-L 1 ), устраняет эффект канала связи без необходимости оценки канального усиления. N1 корреляций вычисляются для N1 различных пар принимаемых выборок. В таком случае уравнение (2) накапливает N1 результатов корреляции от c(n) до c(n-N1+1) для получения результата корреляции с задержкой C(n), который является комплексным значением.
Показатель корреляции с задержкой может задаваться как квадрат модуля результата корреляции с задержкой следующим образом:

где |x|2 обозначает квадрат модуля x.
Терминал может объявить наличие TDM пилот-сигнала 1, если выполняется следующее условие:

где Erx - это энергия принимаемых выборок, а λ - пороговое значение. Энергия Erx может быть вычислена на основе принимаемых выборок, используемых для корреляции с задержкой, и она указывает временно локальную энергию. Уравнение (4) выполняет нормализованное сравнение, где нормализация основана на энергии принимаемых выборок TDM пилот-сигнала 1, если он присутствует. Пороговое значение λ может выбираться на основе компромисса между вероятностью обнаружения и вероятностью ложного аварийного оповещения для TDM пилот-сигнала 1. Вероятность обнаружения - это вероятность корректного указания наличия TDM пилот-сигнала 1, когда он присутствует. Вероятность ложного оповещения - это вероятность некорректного указания наличия TDM пилот-сигнала 1, когда он отсутствует. Желательны высокая вероятность обнаружения и низкая вероятность ложного оповещения. В общем, более высокое пороговое значение снижает и вероятность обнаружения, и вероятность ложного оповещения.
Уравнение (4) показывает использование основанного на энергии порога для распознавания TDM пилот-сигнала 1. Другие схемы задания порогов также могут быть использованы для обнаружения TDM пилот-сигналов. Например, если механизм автоматической регулировки усиления (AGC) автоматически нормализует энергию принимаемых выборок, то абсолютный порог может использоваться для обнаружения TDM пилот-сигналов.
Если терминал оснащен несколькими (R) антеннами, то результат корреляции с задержкой C j (n) может вычисляться для каждой антенны j, как показано в уравнении (2). Результаты корреляции с задержкой для всех антенн могут когерентно объединяться следующим образом:

Квадрат модуля объединенного результата корреляции с задержкой, или  может сравниваться с нормализованным порогом
может сравниваться с нормализованным порогом  , где Ej - это принимаемая энергия для антенны j.
, где Ej - это принимаемая энергия для антенны j.
Терминал вычисляет N1-точечную корреляцию с задержкой C(n) для каждого периода выборки n на основе последовательности принимаемых выборок {r(n-i)} и последовательности задержанных принимаемых выборок {r(n-i-L1)}, как показано в уравнении (2). Если S1=2, то модуль корреляции с задержкой имеет треугольную форму при нанесении на график в сравнении с периодом выборки n. Результат корреляции с задержкой имеет пиковое значение в периоде выборки n p. Этот пик возникает, когда корреляция с задержкой охватывает продолжительность двух последовательностей пилот-сигналов 1. Если корреляция с задержкой выполняется так, как описано выше и в отсутствие шума, то период выборки n p "близко" к концу второй последовательности пилот-сигналов 1 для TDM пилот-сигнала 1. Эта погрешность позиции пика обусловлена ISI-эффектами во фронте TDM пилот-сигнала 1. Модуль результата корреляции с задержкой уменьшается постепенно по обеим сторонам периода выборки n p , поскольку сигнал является периодическим только в части продолжительности корреляции с задержкой для всех остальных периодов выборки.
Терминал объявляет наличие TDM пилот-сигнала 1, если показатель корреляции с задержкой S(n) пересекает заранее определенный порог в любом периоде выборки, как показано в уравнении (4). Этот период выборки возникает слева или во фронте треугольной формы. Терминал продолжает выполнять корреляцию с задержкой (к примеру, для следующих L1 периодов выборки) для обнаружения пика результата корреляции с задержкой. Если TDM пилот-сигнал 1 обнаружен, то позиция пика корреляции с задержкой используется в приблизительной оценке времени. Эта оценка времени может быть не очень точной, поскольку (1) результат корреляции с задержкой имеет постепенный пик, и позиция пика может быть неточной при наличии шума; и (2) ISI во фронте TDM пилот-сигнала 1 приводят к ухудшению результата корреляции с задержкой.
В альтернативном варианте осуществления корреляция с задержкой выполняется по всему кадру для получения показателя корреляции с задержкой для каждого периода выборки в каждом кадре. Наибольший показатель корреляции с задержкой в кадре затем предоставляется в качестве позиции обнаруженного TDM пилот-сигнала 1 и приблизительной оценки времени. Этот вариант осуществления выполняет обнаружение TDM пилот-сигналов 1 без использования порога и также может снижать ложные обнаружения пиков вследствие помех от, к примеру, мультиплексированного с частотным разделением каналов (FDM) пилот-сигнала, который передается постоянно по всей части данных в кадре соседними базовыми станциями или обнаруживаемой базовой станцией. Другие схемы (которые могут использовать более сложную логику обнаружения) также могут использоваться для обнаружения наличия TDM пилот-сигнала 1 и определения позиции пика корреляции с задержкой.
Корреляция с задержкой чаще всего используется для обнаружения наличия базового периодического сигнала. Таким образом, корреляция с задержкой невосприимчива к ухудшению качества вследствие многолучевого распространения, но при этом фиксирует разнесение многолучевого распространения. Это обусловлено тем, что периодический сигнал остается периодическим при наличии многолучевого распространения. Более того, если несколько базовых станций передают периодические сигналы одновременно, то композитный сигнал в терминале также является периодическим. Для синхронной передачи пилот-сигналов, показанной на фиг.3A, TDM пилот-сигнал 1, по сути, не обнаруживает помех (для цели корреляции с задержкой), и на него оказывает влияние главным образом термический шум. Как результат, отношение "сигнал-шум" (SNR) или соотношение мощности несущей к помехам (C/I) для TDM пилот-сигнала 1 может быть выше SNR для других передач. Более высокий SNR для TDM пилот-сигнала 1 позволяет терминалу добиваться оптимальной производительности обнаружения при меньшей продолжительности TDM пилот-сигнала 1, что снижает передачу служебных сигналов.
Терминал может получать приблизительную оценку погрешности частоты на основе результата корреляции с задержкой C(n). Если частота радиочастотного (RF) генератора, используемого для преобразования с понижением частоты в терминале, смещено средней частотой принимаемого сигнала, то принимаемые выборки имеют кривую фазы во временной области и могут быть выражены следующим образом:
 , уравнение (6)
, уравнение (6)
где Δf - это сдвиг/погрешность частоты, а Tc - период одного элементарного сигнала. Уравнение (6) отличается от уравнения (1) кривой фазы  , вызываемой погрешностью частоты Δf в RF-генераторе терминала.
, вызываемой погрешностью частоты Δf в RF-генераторе терминала.
Если выражение для принимаемых выборок в уравнении (6) используется для корреляции с задержкой в уравнении (2), то фаза результата корреляции с задержкой (при условии отсутствия шума) может быть выражена следующим образом:
 , уравнение (7)
, уравнение (7)
где arg{x} - это аргумент x, который является арктангенсом мнимой части x для действительной части x. Погрешность частоты Δf может быть получена посредством деления фазы результата корреляции с задержкой на  следующим образом:
следующим образом:
 . уравнение (8)
. уравнение (8)
Оценка погрешности частоты в уравнении (8) является действительной, если фаза результата корреляции с задержкой находится в диапазоне от -π до π или 2π·Δf•L1•Tc• (-π, π). Слишком большая погрешность частоты не может быть обнаружена посредством корреляции с задержкой. Таким образом, погрешность частоты должна сохраняться меньшей максимального допустимого диапазона. Например, |Δf| должно быть меньше 9,75 КГц или 4,65 частей на миллион (ppm), если средняя частота равна 2,1 ГГц. В консервативной структуре погрешность частоты может быть ограничена еще меньшим диапазоном, к примеру, |Δf|<2,5 ppm. Большая погрешность частоты может допускаться и обнаруживаться посредством уменьшения длины последовательности пилот-сигналов 1. Тем не менее меньшая последовательность пилот-сигналов 1 также ухудшает производительность обнаружения сигналов.
(-π, π). Слишком большая погрешность частоты не может быть обнаружена посредством корреляции с задержкой. Таким образом, погрешность частоты должна сохраняться меньшей максимального допустимого диапазона. Например, |Δf| должно быть меньше 9,75 КГц или 4,65 частей на миллион (ppm), если средняя частота равна 2,1 ГГц. В консервативной структуре погрешность частоты может быть ограничена еще меньшим диапазоном, к примеру, |Δf|<2,5 ppm. Большая погрешность частоты может допускаться и обнаруживаться посредством уменьшения длины последовательности пилот-сигналов 1. Тем не менее меньшая последовательность пилот-сигналов 1 также ухудшает производительность обнаружения сигналов.
Погрешность частоты Δf может корректироваться различными способами. Например, частота RF-генератора в терминале может регулироваться посредством схемы фазовой автоподстройки частоты (PLL) для корректировки погрешности частоты. В качестве еще одного примера принимаемые выборки могут быть повернуты цифровым способом следующим образом:
 , уравнение (9)
, уравнение (9)
где r'(n) - это скорректированная по частоте выборка. Терминал также может выполнять повторную дискретизацию скорректированных по частоте выборок, чтобы учесть погрешность частоты тактового сигнала, используемого при дискретизации, что может быть сгенерировано для того же RF-генератора.
2. Прямая корреляция для TDM пилот-сигнала 1
Пик корреляции с задержкой дает примерную позицию TDM пилот-сигнала 1. Фактическая позиция TDM пилот-сигнала 1 попадает в окно неопределенности (обозначаемое Wu), которое центрировано в позиции n p пика корреляции с задержкой. Моделирование на вычислительных машинах примерной системы показывает, что существует высокая вероятность того, что TDM пилот-сигнал 1 попадает в рамки ±35 периодов выборки позиции пика n p, когда передачу выполняет одна базовая станция. Когда несколько базовых станций осуществляют передачу в синхронной системе, окно неопределенности зависит от запаздывания или задержки между временем поступления сигналов, передаваемых этими базовыми станциями. Это запаздывание зависит от расстояния между базовыми станциями. В качестве примера, расстояние в 5 километров (км) соответствует запаздыванию примерно в 80 периодов выборки, и окно неопределенности примерно равно ±80 периодов выборки. В общем, окно неопределенности зависит от различных факторов, таких как пропускная способность системы, продолжительность TDM пилот-сигнала 1, принимаемый SNR для TDM пилот-сигнала 1, число базовых станций, передающих TDM пилот-сигнал 1, задержка по времени для различных базовых станций и т.д.
Терминал может выполнять прямую корреляцию для обнаружения мощных экземпляров TDM пилот-сигнала 1 в рамках окна неопределенности. Для каждого сдвига по времени в рамках окна неопределенности терминал может выполнять прямую корреляцию для каждого из M1 возможных PN1-последовательностей, которые могут использоваться для TDM пилот-сигнала 1. Альтернативно, терминал может выполнять прямую корреляцию для каждой PN1-последовательности, используемой базовой станцией в наборе вариантов терминала. Этот набор вариантов может содержать базовые станции (к примеру, секторы), идентифицированные базовыми станциями, с которыми обменивается данными терминал, базовыми станциями, в которых терминал идентифицировал себя посредством медленного поиска, и т.д. В любом случае каждая гипотеза пилот-сигналов 1 соответствует (1) конкретному смещению по времени, где может присутствовать TDM пилот-сигнал 1 из базовой станции, и (2) конкретной PN1-последовательности, которая могла использоваться для TDM пилот-сигнала 1.
Прямая корреляция TDM пилот-сигнала 1 для гипотезы пилот-сигналов 1 (n,m) со смещением по времени n и PN1-последовательностью pm(i) может быть выражена следующим образом:

где
n - это смещение по времени для гипотезы пилот-сигналов 1 (n,m), которая попадает в рамки окна неопределенности, или n
Wu;
p' m (i) - это i-ый элементарный сигнал в расширенной PN1-последовательности для гипотезы пилот-сигналов 1 (n,m);
D m (n) - это результат прямой корреляции гипотезы пилот-сигналов 1 (n,m); и
N1d - это длина прямой корреляции TDM пилот-сигнала 1 (к примеру, N1d=S1•L1).
Расширенная PN1-последовательность p' m (i) получается посредством повторения PN1-последовательности p m (i) для гипотезы пилот-сигналов 1 (n,m) столько раз, сколько требуется для получения N1d элементарных PN-сигналов. Например, если прямая корреляция выполняется для двух экземпляров пилот-сигналов 1 или N1d=2•L1, то PN1-последовательность p m (i) длины L1 повторяется два раза для получения расширенной PN1-последовательности p' m (i) длины 2L1.
Для каждой оцениваемой PN1-последовательности терминал может выполнять прямую корреляцию каждую половину элементарного сигнала в рамках окна неопределенности для уменьшения ухудшения вследствие ошибки синхронизации выборок в терминале. Например, если окно неопределенности составляет ±80 элементарных сигналов, то терминал может выполнить 320 прямых корреляций для каждой PN1-последовательности, что соответствует неопределенности в 80 периодов выборки в каждом направлении от середины окна неопределенности в периоде выборки n p . Если все M1 PN1-последовательностей оцениваются, то общее число прямых корреляций для TDM пилот-сигнала 1 равно 320•M1. В общем, терминал выполняет K1 прямых корреляций для K1 различных смещений по времени в каждой оцениваемой PN1-последовательности или K1•M1 прямых корреляций, если оцениваются все M1 PN1-последовательностей.
Прямая корреляция используется для идентификации мощных экземпляров TDM пилот-сигнала 1 в принимаемом сигнале. После выполнения всех прямых корреляций для TDM пилот-сигнала 1 терминал выбирает K2 наиболее мощных экземпляров TDM пилот-сигнала 1, имеющих наибольшие результаты прямой корреляции. Каждый экземпляр обнаруженного TDM пилот-сигнала 1 ассоциативно связан с конкретным смещением по времени и конкретной PN1-последовательностью, к примеру, k-ый экземпляр обнаруженного TDM пилот-сигнала 1 ассоциативно связан со смещением по времени n k и PN1-последовательностью p k (i). Терминал также может сравнивать показатель прямой корреляции для каждого экземпляра обнаруженного TDM пилот-сигнала 1 с нормализованным порогом и отбрасывать экземпляр, если показатель ниже порога. В любом случае K2 может быть небольшим значением для начального обнаружения сигнала, когда терминал пытается обнаружить наиболее мощную базовую станцию. При передаче обслуживания между базовыми станциями K2 может быть большим значением, чтобы дать возможность обнаружения путей сигналов, принадлежащих наиболее мощной базовой станции, а также более слабым базовым станциям. Моделирование на вычислительных машинах показывает, что K2=4 может быть достаточно для начального обнаружения сигнала, а K2=16 может быть достаточно для обнаружения нескольких базовых станций при передаче обслуживания.
Прямая корреляция также может выполняться в частотной области. Для прямой корреляции в частотной области NF-точечное дискретное преобразование Фурье (DFT) выполняется с NF принимаемыми выборками при данном смещении по времени n, чтобы получить NF значений частотной области для общего числа NF поддиапазонов. Значения частотной области поддиапазонов без символов пилот-сигнала задаются равными нулю. Результирующие NF значений частотной области после этого умножаются с NF символами пилот-сигнала, которые включают в себя PN1-последовательность для оцениваемой гипотезы пилот-сигналов 1. NF результирующих символов могут накапливаться для получения результата прямой корреляции гипотезы пилот-сигналов 1 при смещении по времени n. Альтернативно, NF-точечное IDFT может быть выполнено с NF результирующими символами для получения NF значений временной области, которые соответствуют различным смещениям по времени. В любом случае результаты корреляции могут быть подвергнуты постобработке, как описано выше, для идентификации K2 экземпляров наиболее мощных TDM пилот-сигналов 1.
3. Прямая корреляция для TDM пилот-сигнала 2
Терминал оценивает K2 экземпляров обнаруженных TDM пилот-сигналов 1 посредством выполнения прямой корреляции с принимаемыми выборками для TDM пилот-сигнала 2 с помощью PN2-последовательностей. Для каждого экземпляра обнаруженного TDM пилот-сигнала 1 терминал определяет набор из M2 PN2-последовательностей {sℓ,k(i)}, ассоциативно связанных с PN1-последовательностью p k (i), используемой для этого экземпляра обнаруженного TDM пилот-сигнала 1. Каждый экземпляр обнаруженного TDM пилот-сигнала 1, таким образом, может быть ассоциативно связан с M2 гипотез пилот-сигналов 2. Каждая гипотеза пилот-сигналов 2 соответствует (1) конкретному смещению по времени, где может присутствовать TDM пилот-сигнал 2 из базовой станции, и (2) конкретной PN2-последовательности, которая могла использоваться для TDM пилот-сигнала 2. Для каждой гипотезы пилот-сигналов 2 терминал выполняет прямую корреляцию принимаемых выборок TDM пилот-сигнала 2 с помощью PN2-последовательности для этой гипотезы, чтобы обнаружить присутствие TDM пилот-сигнала 2.
Прямая корреляция TDM пилот-сигнала 2 для гипотезы пилот-сигналов 2 (k,ℓ) со смещением по времени n k и PN2-последовательностью s ℓ,k (i) может быть выражена следующим образом:

где s ℓ,k (i) - это i-ый элементарный сигнал в PN2-последовательности для гипотезы пилот-сигналов 2 (k,ℓ);
r(i-n k ) - это i-ая принимаемая выборка для смещения по времени n k;
G ℓ (n k ) - это результат прямой корреляции гипотезы пилот-сигналов 2 (k,ℓ); и
N2 - это длина прямой корреляции TDM пилот-сигнала 2.
Длина прямой корреляции может задаваться равной длине последовательности пилот-сигналов 2 (т.е. N2=L2) или длине TDM пилот-сигнала 2 (т.е. N2=T2), если T2≠L2.
Показатель прямой корреляции TDM пилот-сигнала 2 может задаваться как квадрат модуля результата прямой корреляции следующим образом:
 . уравнение (12)
. уравнение (12)
Терминал может объявить наличие TDM пилот-сигнала 2, если выполняется следующее условие:
 , уравнение (13)
, уравнение (13)
где Erx - это энергия принимаемых выборок, а µ - это пороговое значение TDM пилот-сигнала 2. Энергия Erx может быть вычислена на основе принимаемых выборок, используемых для прямой корреляции TDM пилот-сигнала 2, и она указывает локальную энергию. Пороговое значение µ может выбираться на основе компромисса между вероятностью обнаружения и вероятностью ложного аварийного оповещения для TDM пилот-сигнала 2.
Если терминал оснащен несколькими (R) антеннами, то результат прямой корреляции G ℓ,j (n k ) может вычисляться для каждой антенны j в данной гипотезе (k,ℓ), как показано в уравнении (11). Результаты прямой корреляции для всех R антенн могут когерентно объединяться следующим образом:

Уравнение (14) предполагает, что задержка пути во всех R антеннах одинакова, но модули канальных усилений для R антенн являются независимыми. Композитный показатель прямой корреляции H total,ℓ (n k ) может быть сравнен с нормализованным порогом µ·Erx_total, где Erx_total - это совокупная энергия всех R антенн.
Пороги λ и µ используются для обнаружения TDM пилот-сигналов 1 и 2 соответственно. Эти пороги определяют вероятность обнаружения, а также вероятность ложного оповещения. Низкие пороги λ и µ повышают вероятность обнаружения, но при этом повышают и вероятность ложного оповещения, и обратное справедливо для высоких порогов λ и µ. Для данного порога вероятность обнаружения и вероятность ложного оповещения, в общем, возрастает с увеличением SNR. Пороги λ и µ могут выбираться соответствующим образом, так чтобы (1) частота обнаружений для корреляции с задержкой и прямой корреляции соответственно была достаточно высокой даже при низких SNR, и (2) частота ложных оповещений для корреляции с задержкой и прямой корреляции соответственно была достаточно низкой даже при высоких SNR.
Вероятность обнаружения Pdet соответствует вероятности отсутствия обнаружения (1-Pdet). Отсутствие обнаружения не обнаруживает присутствующий пилот-сигнал. Отсутствие обнаружения TDM пилот-сигнала 1 имеет результатом увеличение времени на обнаружение сигнала до приема следующей передачи TDM пилот-сигнала 1. Если TDM пилот-сигнал 1 передается периодически (к примеру, каждые 20 миллисекунд), то отсутствие обнаружения TDM пилот-сигнала 1 не является проблемой.
Ложное оповещение корреляции с задержкой TDM пилот-сигнала 1 не является катастрофическим, поскольку последующая прямая корреляция TDM пилот-сигнала 2, вероятнее всего, зафиксирует это ложное оповещение как некорректную гипотезу, т.е. эта гипотеза с большой долей вероятности завершит ошибкой нормализованное сравнение в уравнении (13). Негативный эффект ложного оповещения корреляции с задержкой заключается в дополнительных вычислениях прямых корреляций TDM пилот-сигналов 1 и 2. Число ложных оповещений корреляций с задержкой должно быть небольшим, к примеру, равным данной целевой вероятности негативного оповещения корреляций с задержкой для одного кадра. Ложное оповещение прямой корреляции TDM пилот-сигнала 2 приводит к повышению вероятности ложных оповещений во всей системе. Частота ложных оповещений TDM пилот-сигнала 2 может быть снижена за счет выполнения прямой корреляции только с PN2-последовательностями, используемыми базовыми станциями в наборе вариантов. Большая погрешность частоты, которая превышает максимальный разрешенный диапазон, не корректируется и не обнаруживается посредством прямых корреляций TDM пилот-сигналов 1 и 2 и, следовательно, имеет тот же эффект, что и ложное оповещение.
Можно использовать механизм восстановления из события ложного оповещения при прямой корреляции TDM пилот-сигнала 2. Если прямая корреляция TDM пилот-сигнала 2 объявляет обнаружение, то терминал должен иметь возможность демодуляции каналов данных и управления, отправляемых базовой станцией, после схождения контуров слежения за частотой или временем. Терминал может проверять наличие ложных оповещений посредством попытки декодирования канала управления. Например, каждая базовая станция в системе может выполнять широковещательную передачу канала управления по линии прямой связи для отправки выделения каналов и подтверждения приема терминалам в своей зоне покрытия. Этот канал управления может быть обязан иметь высокую (к примеру, 99%) вероятность обнаружения для удовлетворительной работы системы и может использовать строгий код обнаружения ошибок, к примеру, 16-битный циклически избыточный код (CRC), что соответствует вероятности ложных оповещений в 0,516≈1,5×10-5. Когда прямая корреляция TDM пилот-сигнала 2 объявляет обнаружение, терминал может попытаться декодировать один или более пакетов или сообщений, отправляемых по этому каналу управления. Если декодирование завершается ошибкой, терминал может объявить ложное оповещение и перезапустить процесс обнаружения сигнала.
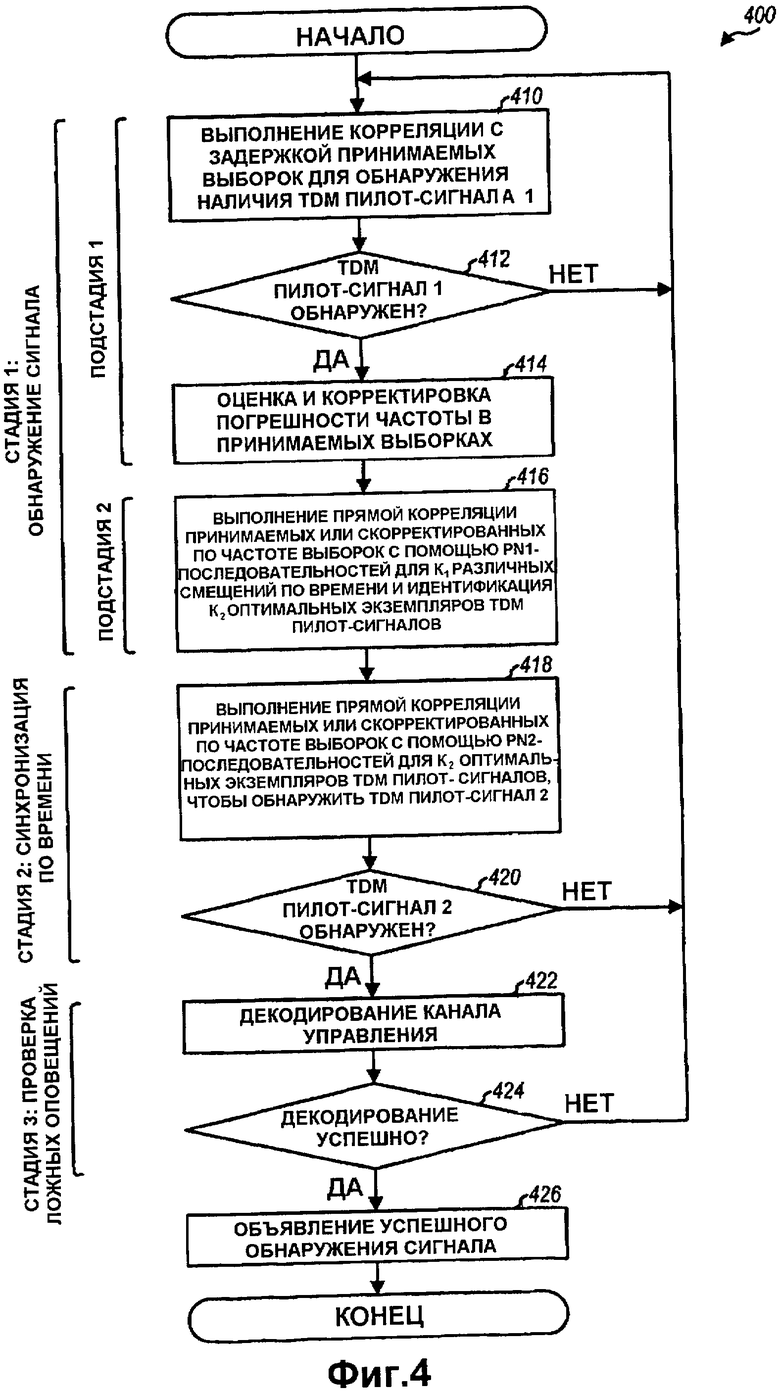
Фиг.4 иллюстрирует блок-схему последовательности операций процесса 400 обнаружения сигнала, выполняемого терминалом. Терминал выполняет корреляцию с задержкой принимаемых выборок для обнаружения наличия TDM пилот-сигнала 1 (этапа 410). Это может осуществляться посредством выполнения корреляции с задержкой для каждого периода выборки и сравнения показателя корреляции с задержкой S(n) с нормализованным порогом. Если TDM пилот-сигнал 1 не обнаружен, как определено на этапе 412, то терминал возвращается к этапу 410 для выполнения корреляции с задержкой в следующем периоде выборки. Тем не менее, если TDM пилот-сигнал обнаружен 1, терминал оценивает погрешность частоты в принимаемой выборке и корректирует погрешность частоты (этап 414).
Затем терминал выполняет прямую корреляцию либо принимаемых выборок, либо скорректированных по частоте выборок с помощью PN1-последовательностей для K1 различных смещений по времени и идентифицирует K2 оптимально обнаруженных экземпляров TDM пилот-сигналов 1, имеющих K2 наибольших результатов прямой корреляции TDM пилот-сигнала 1 (этап 416). Каждый экземпляр обнаруженного TDM пилот-сигнала 1 ассоциативно связан с конкретным смещением по времени и конкретной PN1-последовательностью. Терминал может оценивать M2 гипотез пилот-сигналов 2 для каждого экземпляра обнаруженного TDM пилот-сигнала 1, при этом каждая гипотеза пилот-сигналов 2 ассоциативно связана с конкретным смещением по времени и конкретной PN2-последовательностью. Для каждой гипотезы пилот-сигналов 2 терминал выполняет прямую корреляцию с принимаемыми или скорректированными по частоте выборками с помощью PN2-последовательности для гипотезы и сравнивает показатель прямой корреляции H ℓ (n k ) с нормализованным порогом для обнаружения наличия TDM пилот-сигнала 2 (этап 418).
Если TDM пилот-сигнал 2 не обнаружен, как определено на этапе 420, то терминал возвращается к этапу 410. В противном случае терминал может попытаться декодировать канал управления для проверки наличия ложных оповещений (этап 422). Если канал управления декодируется успешно, как определено на этапе 424, то терминал объявляет успешное обнаружение сигнала (этап 426). В противном случае терминал возвращается к этапу 410.
Процесс обнаружения сигнала может выполняться по стадиям, как показано на фиг.4. Стадия 1 охватывает корреляции с задержкой и прямые корреляции TDM пилот-сигнала 1 и, в общем, используется для обнаружения сигналов. Стадия 1 включает в себя подстадию 1 для корреляции с задержкой TDM пилот-сигнала 1 и подстадию 2 для прямой корреляции TDM пилот-сигнала 1. Стадия 2 охватывает прямую корреляцию TDM пилот-сигнала 2 и используется для синхронизации по времени и идентификации базовых станций. Стадия 3 охватывает декодирование канала управления и используется для проверки наличия ложных оповещений. Обнаружение сигнала также может выполняться с помощью не всех стадий и подстадий, показанных на фиг.4. Например, стадия 3 может быть опущена, подстадия 2 может быть опущена и т.д.
Терминал выполняет начальное обнаружение сигнала (к примеру, при включении питания), если он уже не принимает сигнал от базовой станции. Терминал типично не имеет точную синхронизацию с системой для начального обнаружения сигнала и, таким образом, может выполнять прямую корреляцию TDM пилот-сигнала 1 в течение большего окна неопределенности для обеспечения обнаружения TDM пилот-сигнала 1. При начальном обнаружении сигнала терминалу может требоваться только поиск наиболее мощной базовой станции, и, таким образом, он может выбирать меньшее число экземпляров обнаруженных TDM пилот-сигналов 1 для последующей оценки.
Терминал может выполнять обнаружение сигнала при передаче обслуживания для поиска более оптимальных (к примеру, мощных) базовых станций, от которых может принимать услуги. Для схемы смещенной передачи пилот-сигналов, показанной на фиг.3B, или схемы асинхронной передачи пилот-сигналов, показанной на фиг.3C, терминал может постоянно выполнять поиск мощных базовых станций посредством выполнения корреляции с задержкой в качестве фоновой задачи в то время, когда терминал обменивается данными с одной или более базовыми станциями в активном наборе. Корреляция с задержкой обеспечивает приблизительную синхронизацию для мощных базовых станций, обнаруженных посредством поиска. Для схемы асинхронной передачи пилот-сигналов, показанной на фиг.3A, синхронизация базовых станций в активном наборе может быть использована в качестве приблизительной синхронизации других мощных базовых станций. В любом случае терминал может выполнять прямую корреляцию TDM пилот-сигнала 2 для всех новых базовых станций с достаточно высокой интенсивностью принимаемого сигнала. Поскольку терминал уже имеет точную синхронизацию с системой из базовых станций в активном наборе, терминалу не нужно использовать приблизительную оценку времени из корреляции с задержкой, и он может выполнять прямую корреляцию в рамках окна неопределенности, центрированного по синхронизации базовых станций в активном наборе. Терминал может инициировать передачу обслуживания другой базовой станцией, имеющей большую интенсивность принимаемых сигналов, чем интенсивность базовых станций в активном наборе.
Для ясности выше описана конкретная схема передачи пилот-сигналов с двумя TDM пилот-сигналами. Использование двух TDM пилот-сигналов позволяет уменьшать объем вычислений в терминале, поскольку обнаружение сигнала может выполняться за два этапа - обнаружение сигналов и синхронизации по времени. Корреляция с задержкой для обнаружения сигналов может эффективно выполняться только с помощью одного умножения для каждого периода выборки, как описано выше. Каждая прямая корреляция требует нескольких (N1d или N2) умножений. Число прямых корреляций для вычислений зависит от числа PN-последовательностей, которые должны быть оценены, и может быть большим (к примеру, K1•M1 прямых корреляций для TDM пилот-сигнала 1 и K2•M2 прямых корреляций для TDM пилот-сигнала 2). Предварительная обработка TDM пилот-сигнала 1 позволяет значительно снижать объем обработки, требуемый для TDM пилот-сигнала 2.
M1 PN1-последовательностей может быть использовано для TDM пилот-сигнала 1, и M2 PN2-последовательностей может быть использовано для TDM пилот-сигнала 2 для каждой PN1-последовательности, что в итоге дает M1•M2 PN2-последовательностей. Выбор M1 и M2 влияет на сложность обнаружения сигнала и вероятность ложных оповещений, но имеет незначительное (или вообще не имеет) влияние на вероятности обнаружения для корреляции с задержкой и прямой корреляции (при одинаковых пороговых значениях). В качестве примера, если K1=320 прямых корреляций выполняется для каждой PN1-последовательности (к примеру, при запаздывании в 80 элементарных сигналов) и K2=16 прямых корреляций выполняется для каждой PN2-последовательности (к примеру, для обнаружения сигнала при передаче обслуживания), то общее число прямых корреляций равно K1•M1+K2•M2=320•M1+16•M2. Если M1•M2=256 PN2-последовательностей требуется системе, то вычисления минимизируются, если M1=4 и M2=64, и число прямых корреляций составляет 2304. В общем, любые значения могут выбираться для M1 и M2 в зависимости от различных факторов, таких как, к примеру, общее число PN2-последовательностей, требуемых системой, размер окна неопределенности (или K1), число экземпляров обнаруженных TDM пилот-сигналов 1 для оценки (K2) и т.п. Сложность также может быть понижена посредством поиска пилот-сигналов с помощью PN-последовательностей, используемых базовыми станциями в наборе вариантов.
TDM пилот-сигналы также могут переносить данные. Например, TDM пилот-сигнал 2 может быть использован для отправки одного или более бит информации, которые могут быть вставлены в PN2-последовательность, используемую каждой базовой станцией. Вместо M1•M2 PN2-последовательностей для TDM пилот-сигнала 2 один бит информации может передаваться с помощью 2•M1•M2 PN2-последовательностей для TDM пилот-сигнала 2. В таком случае каждой базовой станции может назначаться пара PN2-последовательностей, и она может использовать одну PN2-последовательность в паре для передачи значения бита информации 0 и использовать другую PN2-последовательность в паре для передачи значения бита информации 1. Число гипотез для оценки при обнаружении сигнала удваивается, поскольку удваивается число вероятных PN2-последовательностей. После обнаружения сигнала PN2-последовательность известна, и ассоциативно связанное значение бита информации может быть установлено. Большее число бит информации может передаваться посредством использования большего набора PN2-последовательностей для каждой базовой станции. Если модуляция данных состоит из умножения PN2-последовательности на фазовый множитель, то дополнительные корреляции не требуются. Это обусловлено тем, что анализируется только модуль корреляции, а фаза игнорируется.
Обнаружение сигнала также может выполняться с помощью одного TDM пилот-сигнала. Например, каждая базовая станция может передавать TDM пилот-сигнал с помощью PN-последовательности, которая уникально идентифицирует базовую станцию. Терминал принимает TDM пилот-сигналы от всех базовых станций и выполняет корреляцию с задержкой принимаемых выборок для обнаружения сигнала. Если сигнал обнаружен, то терминал может выполнять прямую корреляцию принимаемых выборок TDM пилот-сигнала с помощью всех PN-последовательностей и с различным смещением по времени (или K1•M1•M2 прямых корреляций, что может значительно превышать K1•M1+K2•M2). Из результатов прямых корреляций терминал может идентифицировать каждую базовую станцию, передающую TDM пилот-сигнал, и определять ее синхронизацию. Альтернативно, терминал может выполнять прямую корреляцию принимаемых выборок для TDM пилот-сигнала с помощью ограниченного набора PN-последовательностей (к примеру, для базовых станций в наборе вариантов) для снижения сложности.
Помимо TDM пилот-сигналов каждая базовая станция в OFDM-системе может передавать пилот-сигнал, мультиплексированный с частотным разделением каналов (FDM), по одному или более поддиапазонов пилот-сигнала, т.е. поддиапазонов, предназначенных для FDM пилот-сигнала. Каждая базовая станция может передавать FDM пилот-сигнал в поле 230 данных на фиг.2A и может применять уникальную PN-последовательность для символов пилот-сигнала, отправляемых по поддиапазонам пилот-сигнала. Первый элементарный PN-сигнал в этой PN-последовательности может быть использован для FDM пилот-сигнала в периоде символа 1, второй элементарный PN-сигнал может быть использован для FDM пилот-сигнала в периоде символа 2 и т.д. PN-последовательность, используемая для FDM пилот-сигнала, может быть такой же или отличной от PN2-последовательности, используемой для TDM пилот-сигнала 2. FDM пилот-сигнал может использоваться для повышения производительности обнаружения сигнала, к примеру, снижения частоты ложных оповещений. FDM пилот-сигнал также может быть использован для уникальной идентификации базовых станций в системе. Например, меньшее число PN2-последовательностей может быть использовано для TDM пилот-сигнала 2, и FDM пилот-сигнал может быть использован для разрешения неоднозначности между базовыми станциями.
Прямые корреляции TDM пилот-сигналов 1 и 2 вычисляют мощность принимаемого сигнала с конкретными смещениями по времени. Таким образом, базовые станции идентифицируются на основе их наиболее мощных путей сигналов, где каждый путь сигнала ассоциативно связан с конкретным смещением по времени. Приемное устройство в OFDM-системе может захватывать энергию для всех путей сигналов в рамках цикличного префикса. Таким образом, базовые станции могут выбираться на основе показателя общей энергии вместо показателя наиболее мощного пути.
В синхронной системе базовые станции могут передавать свои TDM пилот-сигналы 1 и 2 одновременно, как показано на фиг.3A. Альтернативно, базовые станции могут передавать свои TDM пилот-сигналы со смещением во времени, как показано на фиг.3B. Для смещенных TDM пилот-сигналов терминал может получать пики корреляции с задержкой с различными смещениями по времени и может сравнивать эти пики для выбора наиболее мощной базовой станции.
Некоторые или все базовые станции в системе могут быть асинхронными. В этом случае TDM пилот-сигналы из различных базовых станций могут поступать, не совпадая друг с другом. Терминал при этом может иметь возможность выполнения обнаружения сигнала, описанное выше, для поиска и обнаружения сигнала с пилот-сигналами из базовой станции. Тем не менее, если базовые станции являются асинхронными, то TDM пилот-сигнал 1 из каждой базовой станции может обнаруживать помехи от других базовых станций, и производительность обнаружения для корреляции с задержкой снижается вследствие помех. Продолжительность TDM пилот-сигнала 1 может быть увеличена с учетом помех и достижения требуемой производительности обнаружения (к примеру, требуемой вероятности обнаружения TDM пилот-сигнала 1).
4. Система
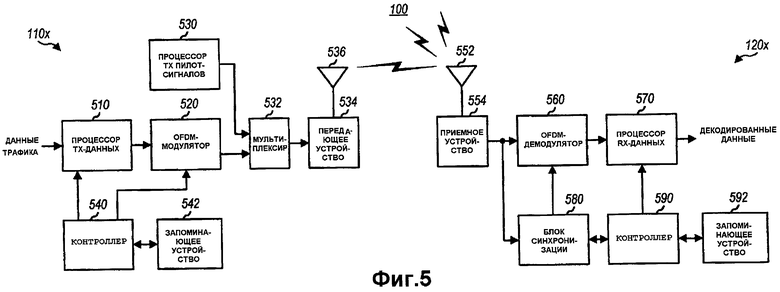
Фиг.5 иллюстрирует блок-схему базовой станции 110x и терминала 120x, которыми являются одна базовая станция и один терминал в системе 100. В базовой станции 110x процессор 510 TX-данных принимает различные типы данных (к примеру, данные трафика и пакетные данные, и служебные сигналы, и управляющие данные) и обрабатывает (к примеру, кодирует, перемежает и выполняет символьное преобразование) принимаемые данные для генерирования символов данных. При использовании в данном документе "символ данных" - это символ модуляции для данных, "символ пилот-сигнала" - это символ модуляции для пилот-сигнала (т.е. данных, которые известны заранее базовой станцией и терминалами), а символ модуляции - это комплексное значение точки сигнального созвездия для схемы модуляции (к примеру, M-PSK, M-QAM и т.п.).
OFDM-модулятор 520 мультиплексирует символы данных по соответствующим поддиапазонам и выполняет OFDM-модуляцию мультиплексированных символов для генерирования OFDM-символов. Процессор 530 TX пилот-сигналов генерирует TDM пилот-сигналы 1 и 2 во временной области (как показано на фиг.5) или частотной области. Мультиплексор (Mux) 532 принимает и мультиплексирует TDM пилот-сигналы 1 и 2 от процессора 530 TX пилот-сигналов с помощью OFDM-символов из OFDM-модулятора 520 и предоставляет поток выборок в передающее устройство (TMTR) 534. Передающее устройство 534 преобразует поток выборок в аналоговые сигналы и дополнительно приводит к требуемым параметрам (к примеру, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы для генерирования модулированного сигнала. Затем базовая станция 110x передает модулированный сигнал из антенны 536 терминалам в системе.
В терминале 120x передаваемые сигналы от базовой станции 110x, а также других базовых станций принимается антенной 552 и предоставляется приемному устройству (RCVR) 554. Приемное устройство 554 приводит к требуемым параметрам (к примеру, фильтрует, усиливает, преобразует с понижением частоты и оцифровывает) принимаемый сигнал для генерирования потока принимаемых выборок. Блок 580 синхронизации получает принимаемые выборки из приемного устройства 554 и выполняет обнаружение сигнала для обнаружения сигналов от базовых станций и определения синхронизации каждой обнаруженной базовой станции. Блок 580 предоставляет информацию о синхронизации в OFDM-демодулятор 560 и контроллер 590.
OFDM-демодулятор 560 выполняет OFDM-демодуляцию принимаемых выборок на основе информации о синхронизации из блока 580 и получает принимаемые данные и символы пилот-сигнала. OFDM-демодулятор 560 также выполняет обнаружение (или согласованную фильтрацию) принимаемых символов данных с помощью оценки характеристик канала (к примеру, оценки частотной характеристики) и получает обнаруженные символы данных, которые являются оценками символов данных, отправленных базовой станцией 110x. OFDM-демодулятор 560 предоставляет обнаруженные символы данных в процессор 570 данных приема (RX). Процессор 570 RX-данных 570 обрабатывает (к примеру, выполняет обратное символьное преобразование, обратное перемежение и декодирование) обнаруженные символы данных и предоставляет декодированные данные. Процессор 570 RX-данных и контроллер могут использовать информацию о синхронизации для восстановления различных типов данных, отправленных базовой станцией 110x. В общем, обработка посредством OFDM-демодулятора 560 и процессора 570 RX-данных комплементарна обработке посредством OFDM-модулятора 520 и процессора 510 TX-данных соответственно в базовой станции 110x.
Контроллеры 540 и 590 управляют работой базовой станции 110x и терминала 120x соответственно. Запоминающие устройства 542 и 592 обеспечивают хранение программного кода и данных, используемых контроллерами 540 и 590 соответственно.
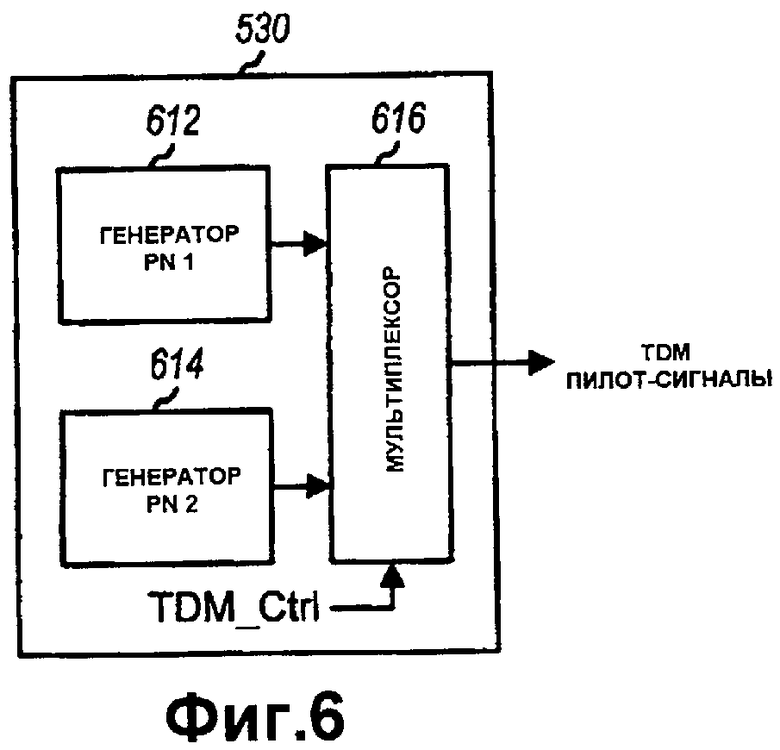
Фиг.6 иллюстрирует блок-схему варианта осуществления процессора 530 TX пилот-сигналов в базовой станции 110x. В этом варианте осуществления процессор 530 TX пилот-сигналов генерирует TDM пилот-сигналы 1 и 2 во временной области. В рамках процессора 530 TX пилот-сигналов PN1-генератор 612 генерирует PN1-последовательность, назначаемую базовой станции 110x, а PN2-генератор 614 генерирует PN2-последовательность, назначаемую базовой станции 110x. Каждый PN-генератор может быть реализован, например, с помощью линейного регистра сдвига с обратными связями (LFSR), который реализует порождающий полином PN-последовательности. PN-генераторы 612 и 614 могут инициализироваться с надлежащими значениями, соответствующими PN1- и PN2-последовательностям, назначенным базовой станции 110x. Мультиплексор 616 принимает выводы из PN-генераторов 612 и 614 и предоставляет вывод из каждого PN-генератора в соответствующее время, определенное посредством сигнала TDM_Ctrl.
TDM пилот-сигналы также могут генерироваться в частотной области, как описано выше. В этом случае PN1- и PN2-последовательности из PN-генераторов 612 и 614 соответственно могут предоставляться в OFDM-модулятор 520 и использоваться для умножения символов пилот-сигнала частотной области или выборок временной области TDM пилот-сигналов.
Фиг.7 иллюстрирует блок-схему варианта осуществления блока 580 синхронизации в терминале 120x. Блок 580 синхронизации включает в себя процессор 710 TDM пилот-сигналов 1 и процессор 740 TDM пилот-сигналов 2. В рамках процессора 710 TDM пилот-сигналов 1 блок 720 корреляции с задержкой выполняет корреляцию с задержкой принимаемых выборок и предоставляет результат корреляции с задержкой C(n) по каждому периоду выборки. Детектор 722 пилот-сигналов и пиков обнаруживает наличие TDM пилот-сигнала 1 в принимаемом сигнале на основе результатов корреляции с задержкой и, если сигнал обнаружен, определяет пик корреляции с задержкой. Детектор 724 погрешности частоты оценивает погрешность частоты в принимаемых выборках на основе фазы результата корреляции с задержкой в обнаруженном пике, как показано в уравнении (8), и предоставляет оценку погрешности частоты. Блок 726 корректировки погрешности частоты выполняет корректировку погрешности частоты с принимаемыми выборками и предоставляет скорректированные по частоте выборки. Блок 730 прямой корреляции выполняет прямую корреляцию скорректированных по частоте выборок (как показано на фиг.7) или принимаемых выборок (не показаны) для различных смещений по времени в окне неопределенности, которое центрировано в позиции обнаруженного пика, и предоставляет результаты прямой корреляции TDM пилот-сигнала 1. Детектор 732 пиков обнаруживает K2 наиболее мощных экземпляров TDM пилот-сигнала 1 в рамках окна неопределенности.
В рамках процессора 740 TDM пилот-сигналов 2 блок 750 прямой корреляции выполняет прямую корреляцию принимаемых или скорректированных по частоте выборок для различных гипотез пилот-сигналов 2, определенных посредством K2 экземпляров наиболее мощных обнаруженных TDM пилот-сигналов 1 от пикового детектора 732, и предоставляет результаты прямой корреляции для этих гипотез пилот-сигналов 2. Детектор 752 пилот-сигналов обнаруживает наличие TDM пилот-сигнала 2 посредством выполнения нормализованного сравнения, показанного в уравнении (13). Детектор 752 пилот-сигналов предоставляет идентификационные данные, а также синхронизацию каждой обнаруженной базовой станции в качестве вывода детектора.
Фиг.8A иллюстрирует блок-схему варианта осуществления блока 720 корреляции с задержкой TDM пилот-сигнала 1. В рамках блока 720 корреляции с задержкой сдвиговый регистр 812 (длины L1) принимает и сохраняет принимаемую выборку r(n) для каждого периода выборки n, и предоставляет принимаемую выборку с задержкой r(n-L1), которая запаздывает на L1 периодов выборки. Буфер выборок также может использоваться вместо сдвигового регистра 812. Блок 816 также получает принимаемую выборку r(n) и предоставляет комплексно-сопряженную принимаемую выборку r*(n). Для каждого периода выборки n умножитель 814 умножает принимаемую выборку с задержкой r(n - L1) из сдвигового регистра 812 на комплексно-сопряженную принимаемую выборку r*(n) из блока 816 и предоставляет результат корреляции c(n)=r*(n)•r(n-L1) в сдвиговый регистр 822 (длины N1) и сумматор 824. В каждом периоде выборки n сдвиговый регистр 822 принимает и сохраняет результат корреляции c(n) из умножителя 814 и предоставляет результат корреляции c(n-N1 ) с запаздыванием на N1 периодов выборки. В каждом периоде выборки n сумматор 824 принимает и суммирует выходной сигнал C(n-1) регистра 826 с результатом c(n) из умножителя 814, дополнительно вычитает результат с задержкой c(n-N1) из сдвигового регистра 822 и предоставляет свой выходной сигнал C(n) в регистр 826. Сумматор 824 и регистр 826 формируют накапливающий сумматор, который выполняет операцию суммирования в уравнении (2). Сдвиговый регистр 822 и сумматор 824 также сконфигурированы для выполнения текущего скользящего суммирования N1 самых последних результатов корреляции от c(n) до c(n-N1+1). Это осуществляется посредством суммирования самого последнего результата корреляции c(n) из умножителя 814 и вычитания результата корреляции c(n-N1) из N1 периодов выборки ранее, который предоставляется сдвиговым регистром 822.
Фиг.8B иллюстрирует блок-схему варианта осуществления блока 730 прямой корреляции TDM пилот-сигнала 1. В рамках блока 730 прямой корреляции буфер 842 хранит принимаемые выборки. При обнаружении пика корреляции с задержкой TDM пилот-сигнала 1 генератор 832 окон определяет окно неопределенности и предоставляет управляющие данные для оценки каждой из гипотез пилот-сигналов 1. Генератор 832 предоставляет смещение по времени и PN1-последовательность для каждой выборки пилот-сигналов 1. Буфер 842 предоставляет надлежащую последовательность (сопряженных) выборок каждой гипотезы пилот-сигналов 1 на основе указанного смещения по времени. PN-генератор 834 генерирует надлежащую PN1-последовательность с указанным смещением по времени. Умножитель 844 умножает выборки из буфера 842 с PN1-последовательностью из PN-генератора 834. По каждой гипотезе пилот-сигналов 1 накапливающий сумматор 846 накапливает N1d результатов из умножителя 844 и предоставляет результат прямой корреляции для этой гипотезы.
Блок 750 прямой корреляции TDM пилот-сигнала 2 может быть реализован способом, аналогичным блоку 730 прямой корреляции TDM пилот-сигнала 1, хотя и со следующими отличиями. Генератор 832 генерирует управляющие данные для оценки K2 экземпляров обнаруженных TDM пилот-сигналов 1 из пикового детектора 732 вместо K1 смещений по времени в рамках окна неопределенности. PN-генератор 834 генерирует надлежащую PN2-последовательность вместо PN1-последовательности. Накапливающий сумматор 846 выполняет накопление по N2 выборкам вместо N1d выборок.
Описанные в данном документе методики обнаружения сигнала могут быть реализованы различными средствами. Например, эти методики могут быть реализованы в аппаратных средствах, программном обеспечении или их сочетании. При реализации в аппаратных средствах блоки обработки, используемые для генерирования и передачи TDM пилот-сигналов, могут быть реализованы в одной или более специализированных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем матричных БИС (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, предназначенных, чтобы выполнять описанные в данном документе функции, или в их сочетании. Процессоры, используемые для выполнения обнаружения сигнала, также могут быть реализованы в одной или более ASIC, DSP и т.д.
При реализации в программном обеспечении методики обнаружения сигнала могут быть реализованы с помощью модулей (к примеру, процедур, функций и т.п.), которые выполняют описанные в данном документе функции. Программные коды могут быть сохранены в запоминающем устройстве (к примеру, в запоминающем устройстве 542 или 592 на фиг.5) и приведены в исполнение процессором (к примеру, контроллером 540 или 590). Запоминающее устройство может быть реализовано в процессоре или внешне по отношению к процессору, причем во втором случае оно может быть подсоединено к процессору с помощью различных средств, известных в данной области техники.
При использовании в данном документе OFDM также может включать в себя архитектуру множественного доступа с ортогональным частотным разделением каналов (OFDMA), при которой несколько пользователей совместно используют OFDM-каналы.
Заголовки включены в данный документ для ссылок, а также для того, чтобы помогать в поиске определенных разделов. Эти заголовки не предназначены для того, чтобы ограничивать область применения понятий, описанных здесь, и эти понятия могут иметь применимость в других разделах по всему подробному описанию.
Предшествующее описание раскрытых вариантов осуществления предоставлено для того, чтобы дать возможность любому специалисту в данной области техники создавать или использовать настоящее изобретение. Различные модификации в этих вариантах осуществления должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам осуществления без отступления от сущности и объема изобретения. Таким образом, настоящее изобретение не предназначено, чтобы быть ограниченным показанными в данном документе вариантами осуществления, а должно удовлетворять самому широкому объему, согласованному с принципами и новыми признаками, раскрытыми в данном документе.

Изобретение относится к технике связи и может быть использовано в системах беспроводной связи для обнаружения сигнала. Способ обнаружения сигнала заключатся в том, что выполняют первую корреляцию принимаемых выборок для обнаружения первого мультиплексированного с временным разделением каналов (TDM) пилот-сигнала, состоящего из по меньшей мере одного экземпляра первой последовательности пилот-сигналов, причем первая последовательность пилот-сигналов является одной из набора доступных последовательностей пилот-сигналов для первого TDM пилот-сигнала. Если первый TDM пилот-сигнал обнаружен, выполняют вторую корреляцию принимаемых выборок для обнаружения второго TDM пилот-сигнала, состоящего из, по меньшей мере, одного экземпляра второй последовательности пилот-сигналов, причем вторая последовательность пилот-сигналов является одной из набора вторых последовательностей вторых пилот-сигналов, связанных с первой последовательностью пилот-сигналов, причем каждая доступная последовательность пилот-сигналов является связанной с другим набором последовательностей вторых пилот-сигналов, причем первый и второй TDM пилот-сигналы передают в различные интервалы времени. Технический результат - уменьшение ресурсов, необходимых для обнаружения сигнала. 3 н. и 24 з.п. ф-лы. 13 ил.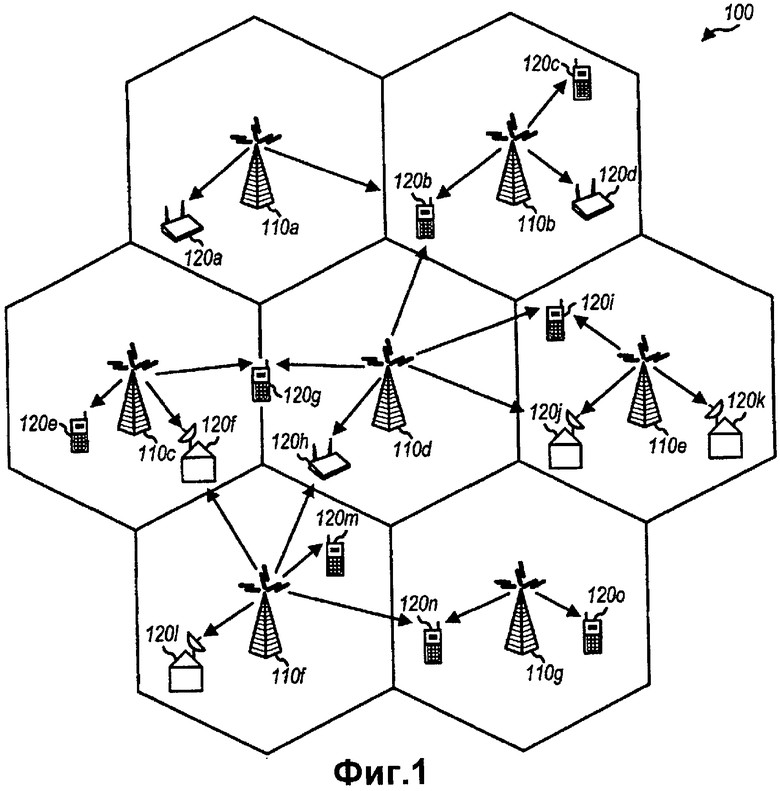
1. Способ выполнения обнаружения сигнала в системе связи, заключающийся в том, что
выполняют первую корреляцию принимаемых выборок для обнаружения первого мультиплексированного с временным разделением каналов (TDM) пилот-сигнала, состоящего из, по меньшей мере, одного экземпляра первой последовательности пилот-сигналов, причем первая последовательность пилот-сигналов является одной из набора доступных первых последовательностей пилот-сигналов для первого TDM пилот-сигнала; и,
если первый TDM пилот-сигнал обнаружен, выполняют вторую корреляцию принимаемых выборок для обнаружения второго TDM пилот-сигнала, состоящего из, по меньшей мере, одного экземпляра второй последовательности пилот-сигналов, причем вторая последовательность пилот-сигналов является одной из набора вторых последовательностей пилот-сигналов, связанных с первой последовательностью пилот-сигналов, причем каждая доступная первая последовательность пилот-сигналов является связанной с другим набором последовательностей вторых пилот-сигналов, причем первый и второй TDM пилот-сигналы передают в различные интервалы времени.
2. Способ по п.1, в котором выполнение первой корреляции принимаемых выборок содержит этап, на котором выполняют первую корреляцию принимаемых выборок с помощью первой последовательности псевдослучайных чисел (PN), и в котором выполнение второй корреляции принимаемых выборок содержит этап, на котором выполняют вторую корреляцию принимаемых выборок с помощью второй PN-последовательности.
3. Способ по п.1, в котором дополнительно
идентифицируют передатчик первого и второго TDM пилот-сигналов на основе первой и второй последовательностей пилот-сигналов.
4. Способ по п.2, в котором дополнительно
идентифицируют передатчик первого и второго TDM пилот-сигналов на основе первой и второй PN-последовательностей.
5. Способ по п.1, дополнительно содержащий этап, на котором,
если обнаружен первый TDM пилот-сигнал, обнаруживают пик в результатах корреляции из первой корреляции для различных периодов выборки и предоставляют позицию пика в качестве оцененной позиции первого TDM пилот-сигнала.
6. Способ по п.1, в котором дополнительно
усредняют результаты корреляции из первой корреляции для множества интервалов передачи.
7. Способ по п.1, в котором дополнительно
извлекают адаптивный порог на основе принимаемых выборок и обнаруживают первый TDM пилот-сигнал на основе адаптивного порога.
8. Способ по п.1, в котором дополнительно
обнаруживают первый TDM пилот-сигнал на основе фиксированного порога.
9. Способ по п.1, в котором дополнительно
обнаруживают первый TDM пилот-сигнал на основе наиболее высокого результата корреляции, обеспеченного посредством первой корреляции в каждом интервале передачи.
10. Способ по п.2, в котором выполнение второй корреляции содержит этап, на котором
выполняют прямую корреляцию принимаемых выборок с помощью, по меньшей мере, одной гипотетической второй PN-последовательности.
11. Способ по п.2, в котором выполнение второй корреляции содержит этапы, на которых
выполняют прямую корреляцию принимаемых выборок для, по меньшей мере, одной гипотезы, причем каждая гипотеза соответствует конкретному смещению по времени и гипотетической второй PN-последовательности второго TDM пилот-сигнала,
вычисляют показатель прямой корреляции для каждой из, по меньшей мере, одной гипотезы,
сравнивают показатель прямой корреляции для каждой гипотезы с порогом, и
объявляют обнаружение второго TDM пилот-сигнала, если показатель прямой корреляции для любой из, по меньшей мере, одной гипотезы превышает порог.
12. Способ по п.1, в котором дополнительно
принимают мультиплексированный с частотным разделением каналов (FDM) пилот-сигнал, причем первый и второй TDM пилот-сигналы и (FDM) пилот-сигнал передают в различные интервалы времени.
13. Способ по п.1, в котором выполнение первой корреляции принимаемых выборок содержит этап, на котором выполняют первую корреляцию принимаемых выборок во временной области с помощью первого псевдослучайного числа (PN), используемого для генерирования первого TDM пилот-сигнала.
14. Способ по п.1, в котором выполнение первой корреляции принимаемых выборок содержит этап, на котором выполняют первую корреляцию принимаемых выборок в частотной области с помощью первого псевдослучайного числа (PN), используемого для генерирования первого TDM пилот-сигнала.
15. Способ по п.1, в котором выполнение первой корреляции содержит этапы, на которых
выполняют прямую корреляцию между принимаемыми выборками и, по меньшей мере, одной гипотетической первой PN-последовательностью для множества смещений по времени,
идентифицируют К наибольших результатов прямой корреляции, полученных для множества смещений по времени и, по меньшей мере, одной первой PN-последовательности, причем К является целым числом, равным единице или больше, и
предоставляют К обнаруженных экземпляров первой последовательности пилот-сигналов, соответствующей К наибольшим результатам прямой корреляции, причем каждый обнаруженный экземпляр первой последовательности пилот-сигналов ассоциативно связан с конкретным смещением по времени и конкретной первой PN-последовательностью.
16. Способ по п.1, в котором дополнительно
идентифицируют передающее устройство первого и второго TDM пилот-сигналов на основе последовательности псевдослучайных чисел (PN), используемой во второй корреляции для обнаружения второго TDM пилот-сигнала.
17. Способ по п.1, в котором дополнительно
принимают первый TDM пилот-сигнал на наборе поднесущих среди всех доступных поднесущих.
18. Способ по п.1, в котором дополнительно,
если первый TDM пилот-сигнал обнаружен, выполняют третью корреляцию принимаемых выборок для обнаружения мультиплексированного с частотным разделением каналов (FDM) пилот-сигнала, отправляемого в множестве частотных поддиапазонов.
19. Способ по п.1, в котором дополнительно
оценивают погрешность частоты в принимаемых выборках на основе результата первой корреляции и
корректируют оцененную погрешность частоты.
20. Способ по п.1, в котором дополнительно,
если обнаружен второй TDM пилот-сигнал, декодируют канал управления для проверки обнаружения второго TDM пилот-сигнала.
21. Способ по п.1, в котором дополнительно
обнаруживают первую последовательность псевдослучайных чисел (РМ) из набора Ml возможных первых PN-последовательностей для первого TDM пилот-сигнала, причем Ml равно единице или более;
обнаруживают вторую последовательность псевдослучайных чисел (PN) из набора М2 возможных вторых PN-последовательностей для первого TDM пилот-сигнала, причем М2 больше единицы, причем набор М2 возможных вторых PN-последовательностей связан с обнаруженной первой PN-последовательностью; и
идентифицируют передатчик первого и второго TDM пилот-сигналов на основе обнаруженных первой и второй PN-последовательностей.
22. Устройство для выполнения обнаружения сигнала в системе связи, содержащее
первый блок корреляции, выполненный с возможностью выполнения первой корреляции принимаемых выборок для обнаружения первого мультиплексированного с временным разделением каналов (TDM) пилот-сигнала, состоящего из, по меньшей мере, одного экземпляра первой последовательности пилот-сигналов, причем первая последовательность пилот-сигналов является одной из набора доступных первых последовательностей пилот-сигналов для первого TDM пилот-сигнала; и
второй блок корреляции, выполненный с возможностью выполнения второй корреляции принимаемых выборок для обнаружения второго TDM пилот-сигнала, состоящего из, по меньшей мере, одного экземпляра второй последовательности пилот-сигналов, если первый TDM пилот-сигнал обнаружен, причем вторая последовательность пилот-сигналов является одной из набора вторых последовательностей пилот-сигналов, связанных с первой последовательностью пилот-сигналов, причем каждая доступная первая последовательность пилот-сигналов является связанной с другим набором последовательностей вторых пилот-сигналов, и первый и второй TDM пилот-сигналы передают в различные интервалы времени.
23. Устройство по п.22, в котором первый блок корреляции выполнен с возможностью выполнения первой корреляции принимаемых выборок с помощью первой последовательности псевдослучайных чисел (PN), и в котором второй блок корреляции выполнен с возможностью выполнения второй корреляции принимаемых выборок с помощью второй PN-последовательности.
24. Устройство по п.22, дополнительно содержащее
контроллер, выполненный с возможностью идентификации передатчика первого и второго TDM пилот-сигналов на основе первой и второй последовательностей пилот-сигналов.
25. Устройство для выполнения обнаружения сигнала в системе связи, содержащее
средство выполнения первой корреляции принимаемых выборок для обнаружения первого мультиплексированного с временным разделением каналов (TDM) пилот-сигнала, состоящего из, по меньшей мере, одного экземпляра первой последовательности пилот-сигналов, причем первая последовательность пилот-сигналов является одной из набора доступных первых последовательностей пилот-сигналов для первого TDM пилот-сигнала, и
средство выполнения второй корреляции принимаемых выборок для обнаружения второго TDM пилот-сигнала, состоящего из, по меньшей мере, одного экземпляра второй последовательности пилот-сигналов, если первый TDM пилот-сигнал обнаружен, причем вторая последовательность пилот-сигналов является одной из набора вторых последовательностей пилот-сигналов, связанных с первой последовательностью пилот-сигналов, причем каждая доступная первая последовательность пилот-сигналов является связанной с другим набором последовательностей вторых пилот-сигналов, и первый и второй TDM пилот-сигналы передают в различные интервалы времени.
26. Устройство по п.25, в котором средство выполнения первой корреляции принимаемых выборок содержит средство выполнения первой корреляции принимаемых выборок с помощью первой последовательности псевдослучайных чисел (PN), и в котором средство выполнения второй корреляции принимаемых выборок содержит средство выполнения второй корреляции принимаемых выборок с помощью второй PN-последовательности.
27. Устройство по п.25, дополнительно содержащее
средство, выполненное с возможностью идентификации передатчика первого и второго TDM пилот-сигналов на основе первой и второй последовательностей пилот-сигналов.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6414986 B1, 02.07 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| СПОСОБ УСТАНОВКИ РАЗМЕРА ОКНА ПОИСКА ДЛЯ МОБИЛЬНОЙ СТАНЦИИ В СОТОВОЙ СИСТЕМЕ | 1999 |
|
RU2157059C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПОДВИЖНОЙ СТАНЦИИ ДЛЯ ПРИЕМА СИГНАЛОВ, ПЕРЕДАННЫХ ОТ БАЗОВОЙ СТАНЦИИ | 1999 |
|
RU2181529C2 |
| US 6574205 B1, 03.06 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

