Область техники, к которой относится изобретение
Настоящее изобретение относится к сейсмоприемникам, устройствам для восприятия колебаний в формациях. Изобретение может применяться к другим типам датчиков вибраций, при операции или восприятия, или передачи.
Уровень техники
В сейсморазведке колебания в геологической среде, возникающие от источника сейсмической энергии, воспринимаются в отдельных местах датчиками, и выходной сигнал датчиков используется для определения характера подземных формаций. Источник сейсмической энергии может быть естественным, таким как землетрясения и другая тектоническая активность, оседание, вулканическая активность или т.п., или созданный руками человека, такой как акустический шум от наземной или подземной работы, или преднамеренной работы сейсмических источников на поверхности или под землей. Датчики делятся на две основные категории: гидрофоны, которые воспринимают поле давления, возникающее от сейсмического источника, или сейсмоприемники, которые воспринимают колебание, возникающее от сейсмического источника.
Когда геологическая среда перемещается вследствие сейсмической энергии, распространяющейся или непосредственно от источника, или посредством отражающей границы под землей, сейсмоприемник, который может быть расположен на поверхности земли или на стенке скважины, которая проходит сквозь геологическую среду, перемещается в направлении распространения энергии. Если ось сейсмоприемника совпадает с направлением перемещения, подвижные катушки, установленные на пружинах внутри сейсмоприемника, остаются, тем не менее, в одном и том же положении, вызывая относительное перемещение катушек относительно корпуса. Когда катушки перемещаются в магнитном поле, в катушках наводится напряжение, которое может выводиться в качестве сигнала. Отклик сейсмоприемника является частотно-зависимым.
Чтобы обеспечить надлежащую работу сейсмоприемника, предпочтительно выполнять калибровку сейсмоприемника периодически или перед каждым использованием. Обычно изготовители и поставщики сейсмоприемников не выполняют никаких калибровок своих блоков сейсмоприемников, перед тем как блоки будут проданы потребителям. Скорее изготовители предоставляют гарантии, что технические требования на блоки сейсмоприемников находятся в пределах заданной области допустимых значений при заданной температуре, такой как комнатная температура. Однако такие гарантии допустимых значений не являются заменой надлежащей калибровки блоков сейсмоприемников. Следовательно, многие покупатели блоков сейсмоприемников выполняют свою собственную проверку калибровки купленных блоков сейсмоприемников перед применением таких блоков в полевых условиях.
Однако обычные проверки калибровки сейсмоприемников очень часто недостаточны для гарантирования требуемой точности измерений сейсмоприемников, обычно требуемых для многих видов современной сейсморазведочной деятельности. Следовательно, понятно, что существует потребность улучшить обычные проверки калибровки сейсмоприемников, чтобы повысить точность сейсморазведочных измерений.
Сущность изобретения
Различные варианты осуществления настоящего изобретения относятся к различным способам, системам и продуктам компьютерной программы для вычисления параметров отклика сейсмоприемника, выполненного с возможностью использования в сейсморазведочной деятельности. По меньшей мере одна проверка калибровки сейсмоприемника выполняется для определения значений для первой части параметров отклика, связанных с сейсмоприемником. Первая часть параметров отклика может включать в себя, например, чувствительность разомкнутой цепи, коэффициент демпфирования, собственную частоту и т.д. Используя информацию, относящуюся к первой части параметров отклика, затем может быть определено значение параметра подвижной массы для сейсмоприемника. Согласно одному варианту осуществления значение параметра подвижной массы представляет величину подвижной массы, связанной с сейсмоприемником.
Другой аспект настоящего изобретения относится к методике модифицирования выходной информации об отклике сейсмоприемника, генерируемом первым сейсмоприемником, выполненным с возможностью использования в сейсморазведочной деятельности. Передаточная функция для идеального отклика второго сейсмоприемника определяется на основе информации, относящейся к части параметров отклика, связанных со вторым сейсмоприемником. Часть параметров отклика может включать в себя, например, чувствительность разомкнутой цепи, коэффициент демпфирования, собственную частоту и т.д. Выходная информация об отклике сейсмоприемника, генерируемая первым сейсмоприемником, затем может модифицироваться с использованием передаточной функции. Согласно частному варианту осуществления другая передаточная функция может определяться для первого сейсмоприемника на основе информации, относящейся к части параметров отклика, связанных с первым сейсмоприемником. Выходная информация об отклике сейсмоприемника, генерируемая первым сейсмоприемником, затем может модифицироваться с использованием первой и/или второй передаточных функций.
Еще один аспект настоящего изобретения касается методики обработки сейсморазведочной информации, генерируемой в результате сейсморазведочной деятельности. Первая часть сейсмической информации включает в себя выходную информацию об отклике сейсмоприемника, генерируемую по меньшей мере одним сейсмоприемником. Вторая часть сейсморазведочной информации включает в себя информацию об исходном сигнале, относящуюся по меньшей мере к одному исходному сигналу, используемому при выполнении сейсморазведочной деятельности. Определяется первая часть значений параметров отклика, связанных с первым сейсмоприемником. В одном варианте осуществления первая часть значений параметров отклика может определяться посредством выполнения по меньшей мере одной процедуры проверки калибровки сейсмоприемника. Точность сейсморазведочной информации затем может повышаться посредством модифицирования по меньшей мере части сейсморазведочной информации с целью компенсирования одного или нескольких из первой части значений параметров отклика.
Дополнительные задачи, признаки и преимущества различных аспектов настоящего изобретения станут очевидны из нижеследующего описания его предпочтительных вариантов осуществления, описание которых должно рассматриваться совместно с прилагаемыми чертежами.
Краткое описание чертежей
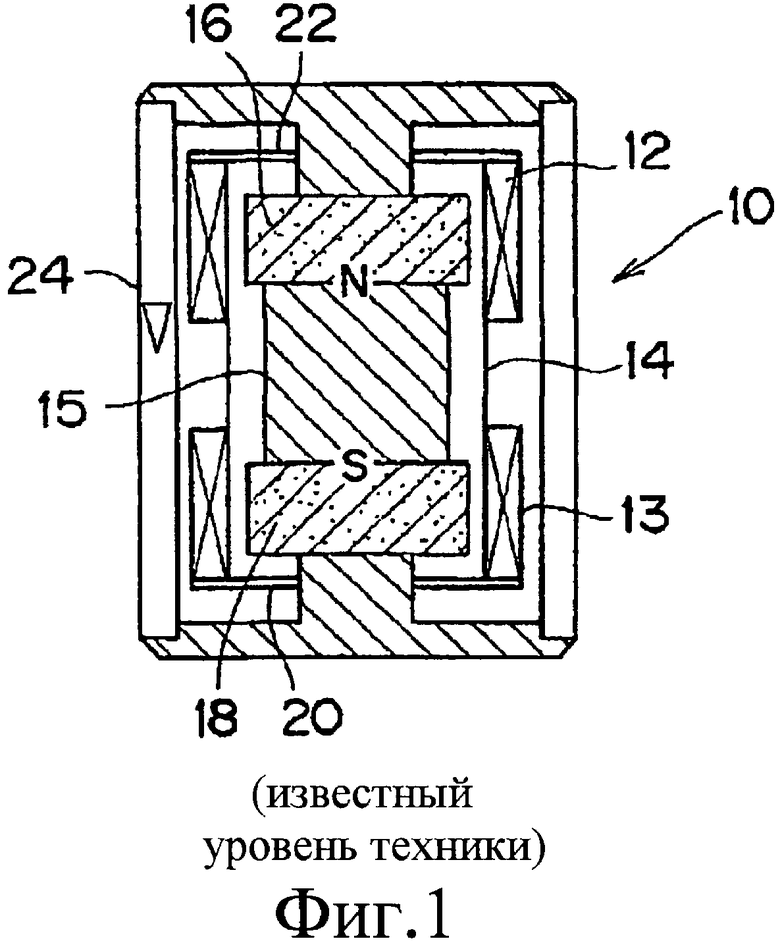
Фиг.1 изображает пример обычного сейсмоприемника 10.
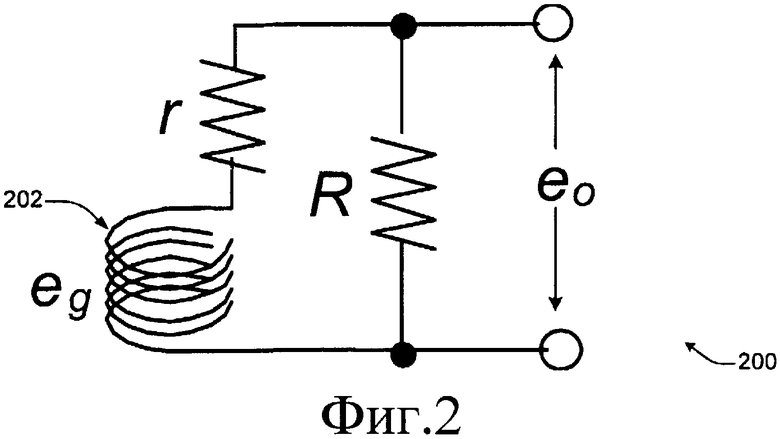
Фиг.2 изображает упрощенное представление электрической схемы сейсмоприемника по фиг.1.
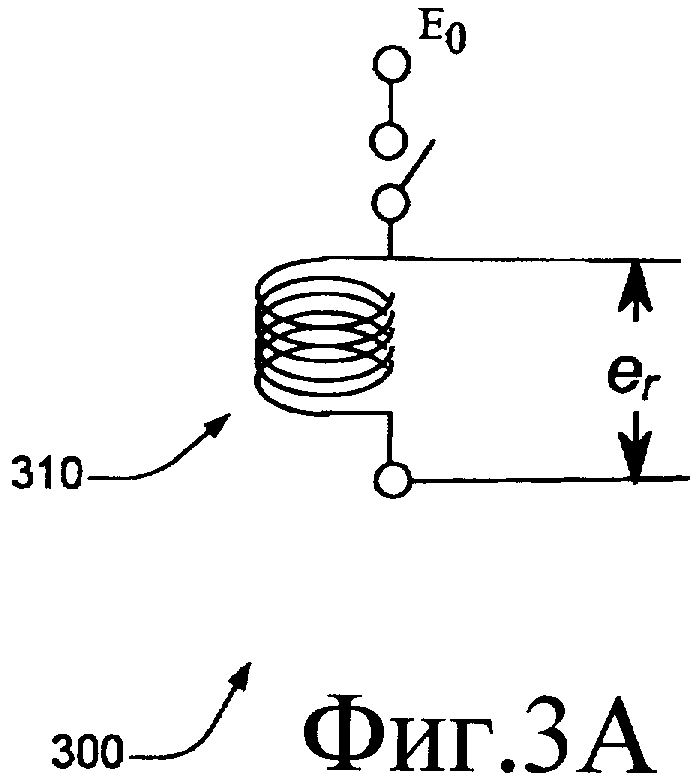
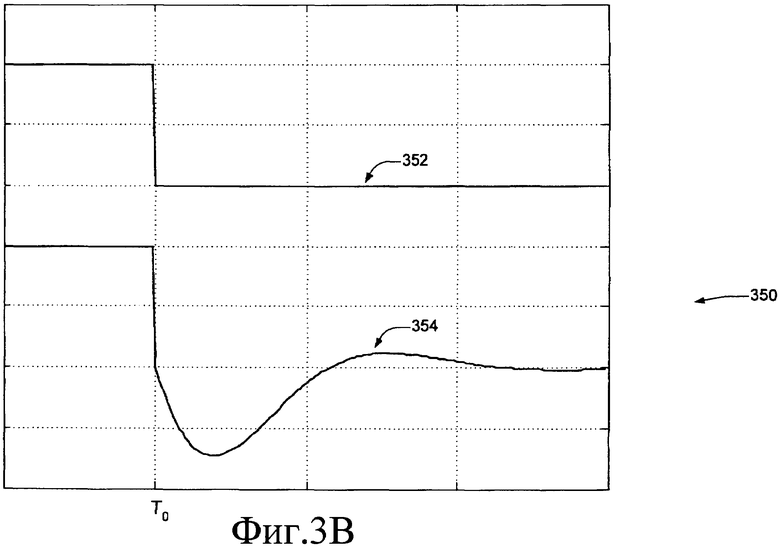
Фиг.3А и 3В предоставляют примеры методики ступенчатой проверки калибровки для измерения свойств отклика сейсмоприемника.
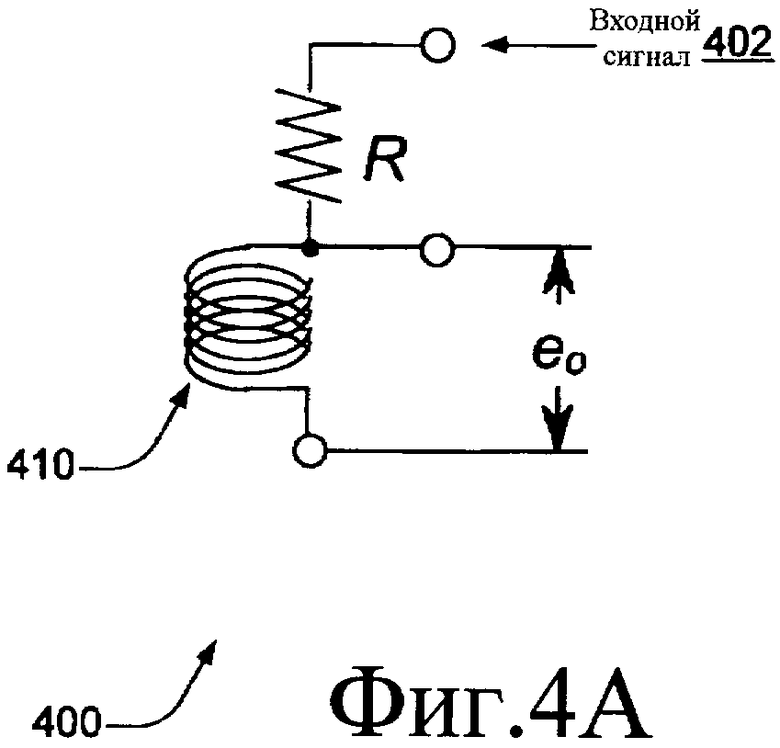
Фиг.4А и 4В предоставляют примеры методики импульсной проверки калибровки для измерения свойств отклика сейсмоприемника.
Фиг.5 предоставляет пример методики импедансной проверки калибровки для измерения свойств отклика сейсмоприемника.
Фиг.6 предоставляет пример методики динамической проверки калибровки для измерения свойств отклика сейсмоприемника.
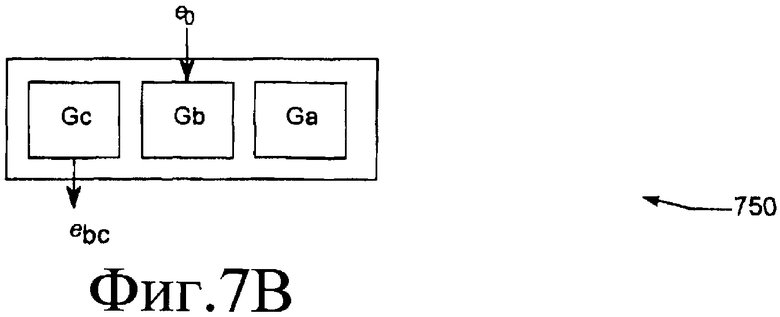
Фиг.7А и 7В предоставляют примеры методики проверки калибровки методом взаимности для измерения свойств отклика сейсмоприемника.
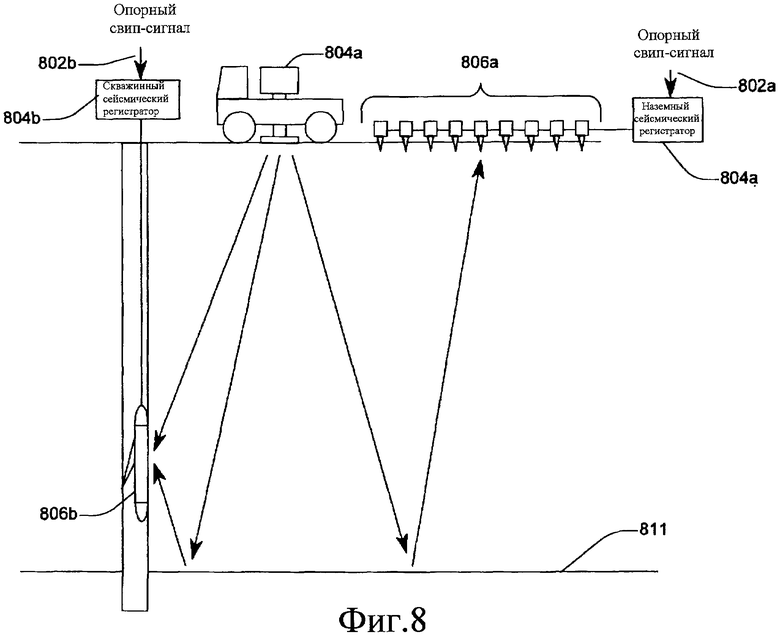
Фиг.8 изображает пример различных конфигураций оборудования, которые могут использоваться для вибросейсмических исследований.
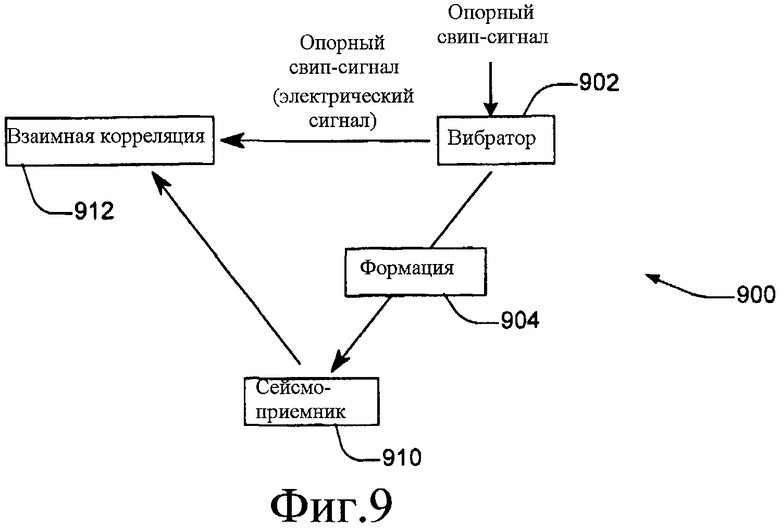
Фиг.9 изображает пример различных путей сигнала, которые могут протекать между различными признаками и устройствами, изображенными на фиг.8.
Фиг.10А изображает пример нефильтрованного свип-сигнала, который может изменяться по частоте (например, 5-50 Гц) в течение данного периода времени.
Фиг.10В изображает пример имитированного свип-сигнала после фильтрации сейсмоприемником.
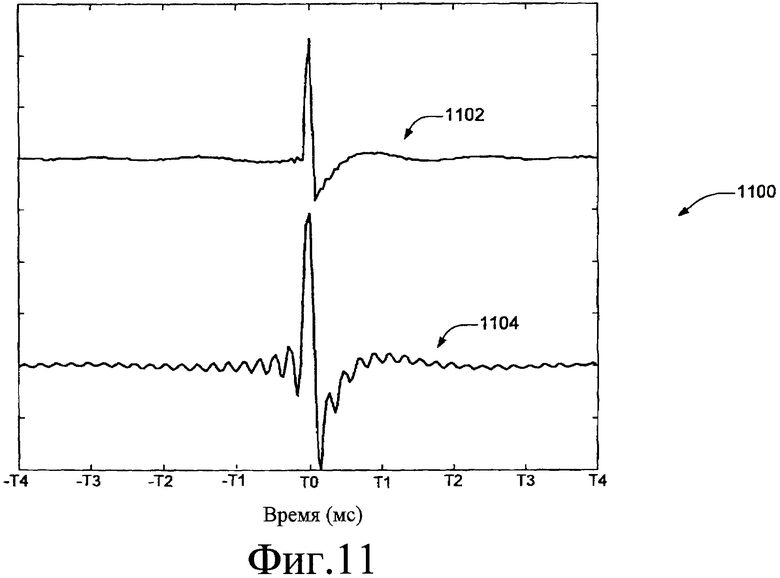
Фиг.11 графически изображает пример корреляции между нефильтрованным (первоначальным) свип-сигналом 1102 и фильтрованным свип-сигналом 1104 сейсмоприемника.
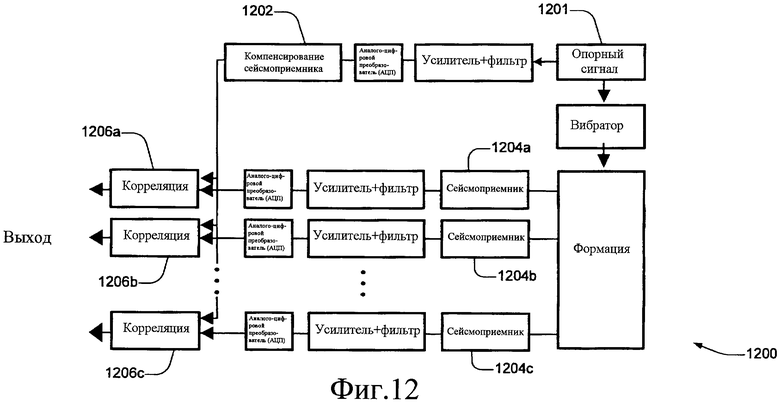
Фиг.12 изображает блок-схему, иллюстрирующую один вариант осуществления того, как методика компенсирования отклика сейсмоприемника настоящего изобретения может применяться к группе сейсмоприемников, которые были развернуты для выполнения вибросейсмических исследований.
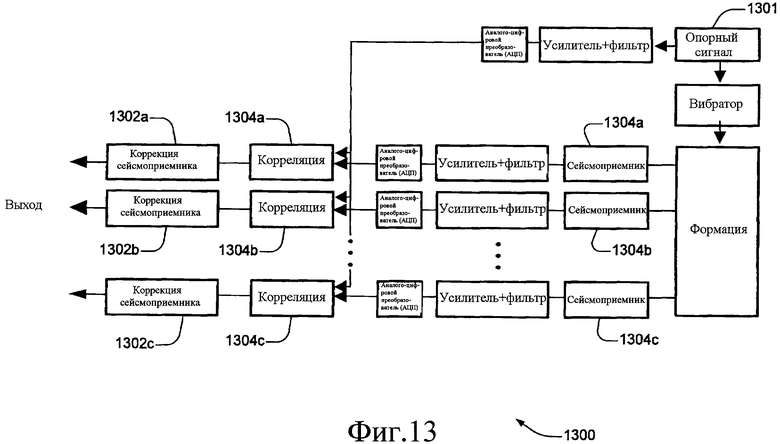
Фиг.13 изображает блок-схему, иллюстрирующую альтернативный вариант осуществления того, как методика компенсирования отклика сейсмоприемника настоящего изобретения может применяться к группе сейсмоприемников, которые были развернуты для выполнения вибросейсмических исследований.
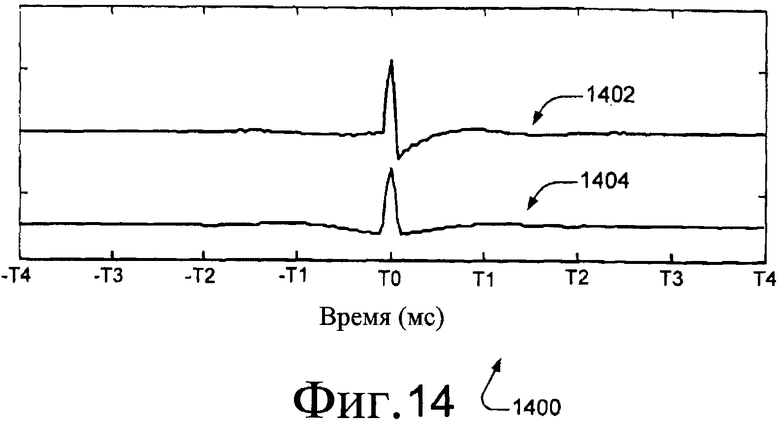
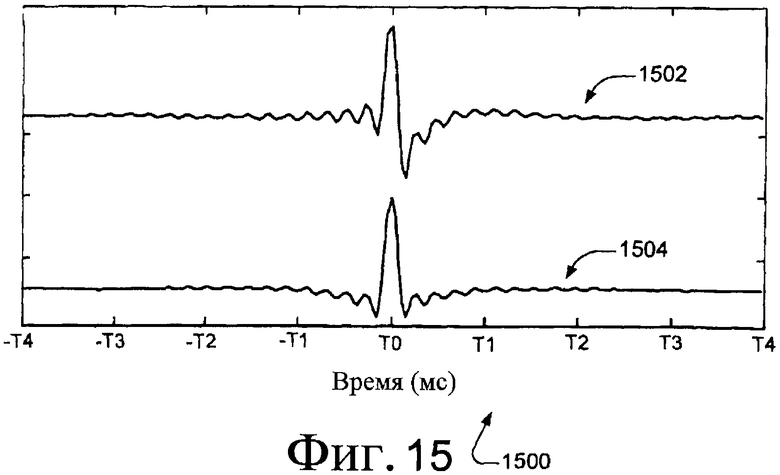
Фиг.14 и 15 графически иллюстрируют различия между некомпенсированными сигналами отклика сейсмоприемника и сигналами отклика сейсмоприемника, которые были компенсированы с использованием методики компенсирования отклика сейсмоприемника настоящего изобретения.
Фиг.16 изображает схематическое представление 1600, которое может использоваться для описания частного варианта осуществления методики импедансной проверки калибровки.
Фиг.17 иллюстрирует действительную и мнимую части уравнения импеданса, представленного в виде окружности на комплексной плоскости.
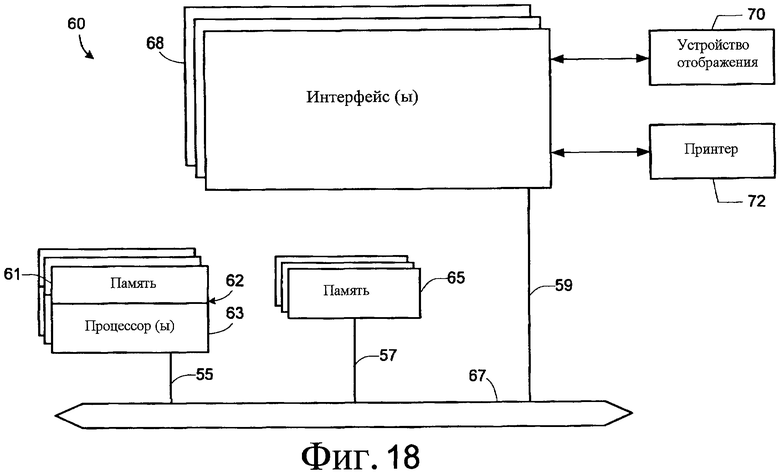
Фиг.18 иллюстрирует сетевое устройство 60, пригодное для реализации различных аспектов методик калибровки и компенсирования сейсмоприемника настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления
Как более подробно описано ниже, настоящее изобретение предоставляет различные методики, которые могут использоваться для облегчения и улучшения сейсморазведочной деятельности. Например, один аспект настоящего изобретения относится к методике, позволяющей выполнять измерения на месте параметров отклика сейсмоприемника. Другой аспект настоящего изобретения относится к методике улучшения калибровки сейсмоприемника и повышения точности измерения параметров отклика сейсмоприемника. Еще другой аспект настоящего изобретения относится к методике компенсирования выходных данных отклика сейсмоприемника с целью повышения точности таких данных.
Для лучшего понимания различных методик и признаков, описанных в данной заявке, ниже представлено краткое описание методик измерения сейсмоприемника.
Сейсморазведка измеряет сейсмические волны, распространяемые по геологической среде, для отображения структурных изображений в геологической среде. Сейсмоприемники часто используются для обнаружения сейсмических сигналов в различных местах, таких как, например, забой скважины, земная поверхность и/или морское дно. Пример обычного сейсмоприемника показан на фиг.1. Сейсмоприемник 10 на фиг.1 включает в себя подвижные катушки 12, 13, установленные на бобине 14, магнит 15, пару полюсных наконечников 16, 18 с подвесными пружинами 20, 22 и корпус 24, как показано на фиг.1. Полюсные наконечники 16, 18 и корпус 24 выполнены из магнитно-проницаемого материала и формируют магнитное поле, в котором подвешены подвижные катушки 12, 13. В примере на фиг.1 подвижные катушки 12, 13, бобина 14 и подвесные пружины 20, 22 вместе образуют часть (m) эффективной подвижной массы сейсмоприемника. Как используется в данной заявке, термин «сейсмоприемник» включает в себя сейсмоприемники обычного типа, такой как тот, который изображен на фиг.1, а также устройства сейсмоприемника-акселерометра (САК), которые, например, могут быть сконфигурированы или разработаны для измерения относительно больших диапазонов ускорений, чем сейсмоприемники обычного типа.
Как показано в варианте осуществления на фиг.1, сейсмоприемник 10 включает в себя подвижную массу катушки, подвешенной в магнитном потоке при помощи пружины или пары пружин. Подвижная катушка стремится оставаться в одном и том же положении, когда корпус магнитной цепи перемещается под действием внешних колебаний. Фиг.2 изображает упрощенную иллюстрацию сейсмоприемника по фиг.1. Как изображено на фиг.2, подвижная катушка 202 вырабатывает напряжение eg под действием внешних колебаний. Катушка имеет связанное с ней сопротивление r постоянному току. Выход сейсмоприемника закорачивается посредством R для получения требуемого коэффициента демпфирования.
Отклик сейсмоприемника обычно определяется посредством связанных с ней свойств отклика, таких как, например, его собственная частота, коэффициент демпфирования, чувствительность и сопротивление постоянному току катушки при комнатной температуре. Пример традиционных свойств отклика сейсмоприемника может быть выражен следующими уравнениями (1)-(6). Для целей иллюстрации предполагается, что сейсмоприемник реагирует на синусоидальные ускорения геологической среды. Таким образом, например, ускорения геологической среды, выраженные посредством

и отклика сейсмоприемника, могут характеризоваться посредством

где
и где eg соответствует генерируемому напряжению,
S0 соответствует чувствительности разомкнутой цепи,
S соответствует общей чувствительности,
ζ0 соответствует демпфированию разомкнутой цепи,
ζ соответствует общему демпфированию,
ω0 соответствует собственной резонансной частоте = 2πf0,
r соответствует сопротивлению постоянному току,
S соответствует шунтирующему сопротивлению,
m соответствует эффективной подвижной массе.
Вибросейсмический метод
При сборе сейсмических данных сейсмические волны используются для интерпретирования подземных формаций. Один тип методики геофизических исследований, в большинстве случаев, известен как «вибросейсмические» исследования или просто вибросейсмический метод. Вибросейсмический метод применяет вибросейсмический источник, используемый для генерирования управляемого волнового пакета, который распространяется по геологической среде или воде и обнаруживается сейсмическими детекторами (например, сейсмоприемниками).
Фиг.8 изображает пример различных конфигураций оборудования, которые могут использоваться для вибросейсмических исследований. Как показано в примере на фиг.8, поверхностный сбор сейсмических данных может выполняться с использованием наземного вибросейсмического источника 812. Обычно наземные вибросейсмические источники излучают возбуждаемое волновое поле в течение выбранного периода времени, известного как длительность посылки свип-сигнала. Сейсмические детекторы (например, сейсмоприемники 806а наземного сбора, сейсмоприемники 806b скважинного сбора) обнаруживают перемещения геологической среды в течение длительности посылки свип-сигнала и в течение дополнительного периода времени, обычно упоминаемого как время прослушивания. Обычно возбуждение принимает форму синусоидального волнового поля с постоянно изменяющейся частотой, приложенного к геологической среде или телу воды в течение длительности посылки свип-сигнала, продолжающейся от примерно 2 до примерно 20 секунд или даже больше. Для морского сбора сейсмических данных сейсмические источники из морских пневмопушек, как правило, используются для генерирования исходного сигнала, который обычно включает в себя одиночный импульс, имеющий многочисленные частоты.
При сборе сейсмической информации, использующем вибратор 812, такой, как тот, который изображен на фиг.8, опорный свип-сигнал возбуждает вибратор, вызывая накачку вибратором акустических сигналов в геологическую среду в соответствии с опорным свип-сигналом. Сейсмоприемники (806а, 806b) на поверхности геологической среды и/или в забое скважины воспринимают сигналы, распространяемые по геологической среде, как показано на фиг.8. Сигналы, обнаруженные сейсмоприемниками, фильтруются передаточной функцией сейсмоприемника, описываемой уравнениями (1) и (2) выше. Зарегистрированные сигналы затем коррелируются с опорным свип-сигналом(ами) (802а, 802b), который подается непосредственно на сейсмические регистраторы (например, наземный сейсмический регистратор 804а, скважинный сейсмический регистратор 804b).
Фиг.9 изображает пример различных путей сигнала, которые могут проходить между различными признаками и устройствами, изображенными на фиг.8. С целью иллюстрации ниже описывается пример методики вибросейсмической взаимной корреляции в качестве примера с ссылкой на фиг.9, 10А, 10В и 11.
Фиг.10А изображает пример нефильтрованного свип-сигнала, который может изменяться по частоте (например, 5-50 Гц) в течение данного периода времени. Как изображено на фиг.9, нефильтрованный электронный свип-сигнал может подаваться на вибратор 902 и блок 912 взаимной корреляции. Согласно одной реализации вибратор 902 использует электронный свип-сигнал для получения соответствующих сейсмических колебаний в формации 904. Эти колебания обнаруживаются сейсмоприемником 910, который вырабатывает фильтрованный выходной сигнал отклика сейсмоприемника. Фиг.10В изображает пример имитированного свип-сигнала после фильтрации сейсмоприемником. В примере на фиг.10В сигнал фильтруется 10-Гц сейсмоприемником с 70% демпфированием.
Блок 912 взаимной корреляции сравнивает нефильтрованный опорный свип-сигнал с фильтрованным сейсмоприемником свип-сигналом. Фиг.11 графически иллюстрирует пример корреляции между нефильтрованным (т.е. первоначальным или исходным) свип-сигналом 1102 и фильтрованным сейсмоприемником свип-сигналом 1104. Как изображено на фиг.11, коррелированные результирующие сигналы больше не имеют нулевую фазу для различных диапазонов частот свип-сигнала, таких как, например, от 10 до 100 Гц и от 5 до 50 Гц.
Характеристики отклика и калибровка сейсмоприемника
Изготовители сейсмоприемников обычно поставляют сейсмоприемники с номинальными свойствами отклика при комнатной температуре и предоставляют гарантии, что свойства отклика находятся в пределах заданной области допустимых значений. Например, изготовитель может указывать, что область допустимых значений при комнатной температуре может составлять, например, +/-5% для собственной частоты, чувствительности разомкнутой цепи, демпфирования разомкнутой цепи и сопротивления постоянному току. Однако проверки, выполненные автором настоящего изобретения, показали, что 5% ошибок в свойствах отклика сейсмоприемника могут приводить к ошибкам измерения амплитуды в 15% или более.
Чтобы обрабатывать сейсмические сигналы с достаточно высоким качеством, чтобы можно было извлечь точную информацию, предпочтительно калибровать сейсмоприемник перед использованием и компенсировать свойства отклика сейсмоприемника посредством коррекции, например, данных, полученных из отклика сейсмоприемника, принимая во внимание калибровку и/или свойства отклика сейсмоприемника.
Традиционно калибровка сейсмоприемника осуществляется посредством выполнения одной или нескольких проверок сейсмоприемника с целью определения свойств отклика сейсмоприемника, а именно собственной частоты, коэффициента демпфирования, чувствительности и сопротивления постоянному току. Обычно сопротивление (r) постоянному току сейсмоприемника подвижной катушки измеряется с использованием мультиметра. Показатели собственной частоты, коэффициента демпфирования и чувствительности сейсмоприемника могут измеряться с использованием различных методик измерения или проверок, таких как, например, методики ступенчатой проверки калибровки, методики импульсной проверки калибровки, методики импедансной проверки калибровки или методики динамической проверки калибровки. Показатели чувствительности сейсмоприемника также могут измеряться с использованием методики проверки калибровки методом взаимности. Каждая из этих различных методик измерения описана ниже.
Методика ступенчатой проверки калибровки
Пример методики ступенчатой проверки калибровки для измерения свойств отклика сейсмоприемника может иллюстрироваться с ссылкой на фиг.3А и 3В. Фиг.3А изображает упрощенную схему сейсмоприемника 300. Согласно одному варианту осуществления методики ступенчатой проверки калибровки напряжение с Е0 может прикладываться для смещения подвижной катушки 310 из ее нейтрального положения. Напряжение, приложенное с Е0, затем отключается (например, в момент Т0 времени), и сейсмоприемник реагирует на это в соответствии с его собственным колебанием. Собственное колебание измеряется как сигнал отклика с выхода сейсмоприемника. Это иллюстрируется, например, на фиг.3В, которая графически иллюстрирует входное напряжение 352 (при Е0) ступенчатой проверки и выходной сигнал 354 сейсмоприемника. Используя ступенчатую проверку, могут быть вычислены показатели чувствительности, собственной частоты и коэффициента демпфирования на основе данного набора первоначальных параметров, включающих в себя значение Е0, сопротивление постоянному току подвижной катушки и величину подвижной массы сейсмоприемника.
Методика импульсной проверки калибровки
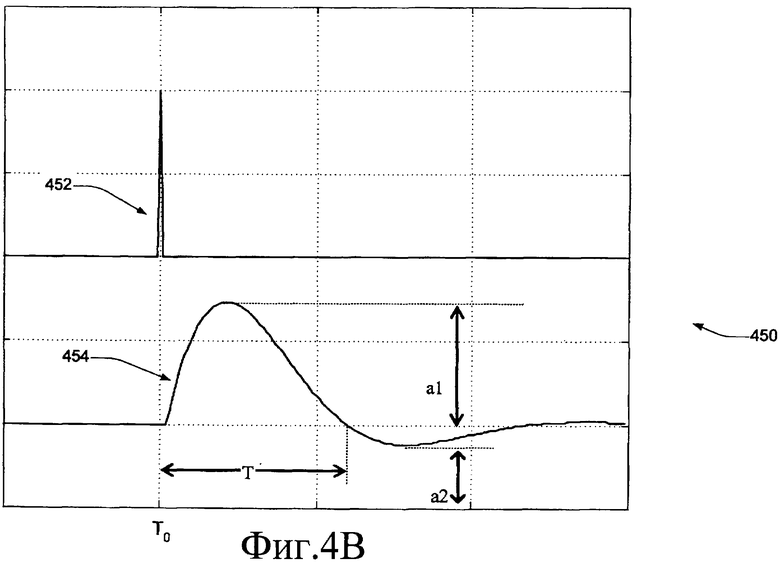
Пример методики импульсной проверки калибровки для измерения свойств отклика сейсмоприемника может иллюстрироваться с ссылкой на фиг.4А и 4В. Фиг.4А изображает упрощенную схему сейсмоприемника 400. Согласно одному варианту осуществления методики импульсной проверки калибровки сигнал импульсной проверки вводится в сейсмоприемник в 402. Пример сигнала импульсной проверки представлен линией 452 сигнала на фиг.4В. Диапазоны частей выходного сигнала 454 отклика сейсмоприемника (например, а1, а2, Т) предварительно вычисляются для чувствительности, демпфирования и собственной частоты на основе заявленных допустимых значений свойств отклика сейсмоприемника. Сигнал импульсной проверки может быть приложен в момент Т0 времени и отклика сейсмоприемника для а1, а2 и Т затем могут быть измерены, чтобы видеть, находятся ли свойства отклика сейсмоприемника в пределах их заявленных областей допустимых значений. Обычно методика импульсной проверки калибровки не используется для калибровки сейсмоприемника, но скорее обычно используется для контроля, что свойства отклика сейсмоприемника находятся в пределах их заявленных областей допустимых значений.
Методика импедансной проверки калибровки
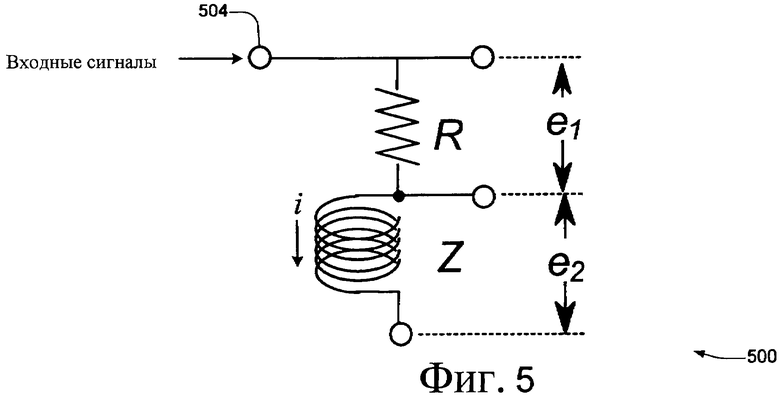
Пример методики импедансной проверки калибровки для измерения свойств отклика сейсмоприемника может иллюстрироваться с ссылкой на фиг.5. Согласно одному варианту осуществления методики импедансной проверки калибровки входной сигнал(ы) (например, синусоидальные сигналы) подается на 504, и измеряются выходные напряжения e1 и е2, как показано на фиг.5. Импеданс на частоте измерения может быть выведен в соответствии со следующим уравнением:
В уравнении 7, приведенном выше, электрический сигнал, приложенный к катушке, представлен посредством е2. Ток, который протекает по катушке, может определяться посредством e1 и R.
Импеданс сейсмоприемника может быть выражен как

Вычисление импеданса использует по меньшей мере два измерения на частотах ω1 и ω2.
Собственная частота (ω0), коэффициент (ζ0) демпфирования и чувствительность (S0) могут быть вычислены по уравнениям:


где
и где: f0 соответствует собственной резонансной частоте [Гц],
ζ0 соответствует коэффициенту демпфирования разомкнутой цепи,
Sg соответствует чувствительности разомкнутой цепи, выведенной из номинальной подвижной массы [В/м/с],
ω1 соответствует угловой частоте f1,
ω2 соответствует угловой частоте f2,
Re(Z) соответствует действительной части импеданса,
Im(Z) соответствует мнимой части импеданса,
r соответствует сопротивлению (Ω) катушки,
m соответствует подвижной массе [кг] сейсмоприемника.
Следует понимать, что вычисление свойств отклика сейсмоприемника, используя вышеописанную методику импедансной проверки калибровки, зависит от использования известного значения для величины подвижной массы (m) сейсмоприемника. Обычно это известное значение для m соответствует номинальному значению подвижной массы, которое предоставляется изготовителем.
Методика динамической проверки калибровки
Пример методики динамической проверки калибровки для измерения свойств отклика сейсмоприемника может иллюстрироваться ссылкой на фиг.6.
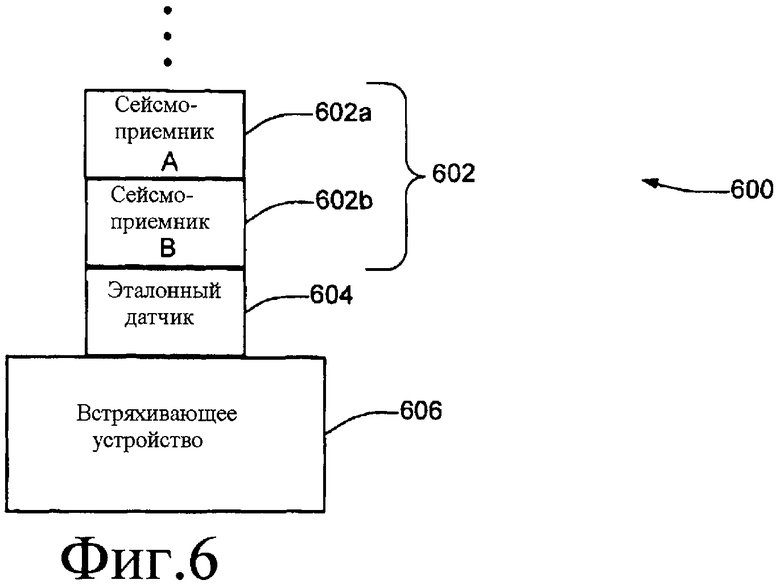
Согласно одному варианту осуществления методики динамической проверки калибровки калиброванный эталонный датчик 604 и один или несколько подлежащих калибровке сейсмоприемников 602 располагаются на верхней части встряхивающего устройства 606, как изображено, например, на фиг.6. Сейсмоприемник(и) 602 и эталонный датчик 604 затем встряхиваются (например, в вертикальном направлении воздействия), используя встряхивающее устройство 606. Свойства отклика сейсмоприемника затем могут быть определены посредством сравнения выходного сигнала отклика сейсмоприемника с выходным сигналом эталонного датчика. Например, так как фазовый и амплитудный отклики известны из измерений эталонного датчика, собственная резонансная частота и коэффициент демпфирования рассматриваемого сейсмоприемника могут быть определены из передаточной функции между ними.
Следует понимать, что относительная точность методики динамической проверки калибровки зависит от точности калибровки эталонного датчика и отклика эталонного датчика. Обычно эталонный датчик 604 калибруется третьей стороной, которая связана с организацией стандартизации измерений некоторого типа.
Вариант осуществления по фиг.6 иллюстрирует одну реализацию динамической проверки калибровки, использующую вертикальную конфигурацию. Согласно альтернативной реализации настоящего изобретения динамическая проверка калибровки также может выполняться с использованием горизонтальной конфигурации. В таком варианте осуществления комплект из сейсмоприемника(ов), эталонного датчика и встряхивающего устройства может располагаться горизонтально, а воздействие прилагаться в горизонтальном направлении.
Согласно по меньшей мере одному варианту осуществления сейсмоприемник(и), эталонный датчик и устройство встряхивателя могут быть заключены в корпус, который, например, может быть выполнен из железа, стали и/или материалов, которые способствуют предотвращению магнитного взаимодействия между встряхивателем и сейсмоприемниками.
Согласно частной реализации методики динамической проверки калибровки эталонный датчик 604 может соответствовать эталонному сейсмоприемнику, в котором в значительной степени была точно измерена и/или определена подвижная масса эталонного сейсмоприемника. Ниже более подробно описаны различные методики для точного измерения подвижной массы сейсмоприемника.
Методика проверки калибровки методом взаимности
Пример методики проверки калибровки методом взаимности для измерения свойств отклика сейсмоприемника может иллюстрироваться ссылкой на фиг.7А и 7В.
Согласно одному варианту осуществления методика проверки калибровки методом взаимности может использоваться для определения чувствительности многочисленных сейсмоприемников в тех ситуациях, когда не используется эталонный датчик.
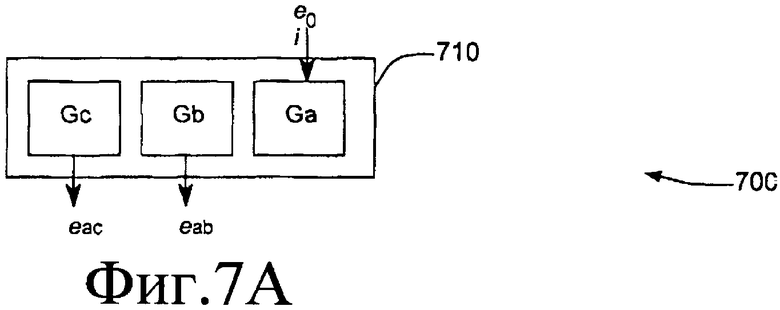
Например, как показано в варианте осуществления на фиг.7А, три некалиброванных сейсмоприемника (Ga, Gb, Gc) устанавливаются на блоке 710. Синусоидальный электрический сигнал е0 затем вводится в один из сейсмоприемников (Ga), который вызывает возбуждение сейсмоприемника Ga в указанном направлении. Это возбуждение приводит к встряхиванию блока 710 и, следовательно, к встряхиванию сейсмоприемников Gb и Gc.
При условии разомкнутой цепи выходные сигналы отклика сейсмоприемников Gb и Gc (а именно еab и еac) могут быть выражены как функция напряжения входного сигнала и импедансов сейсмоприемника
где М представляет собой массу блока с тремя сейсмоприемниками.
Другой синусоидальный электрический сигнал затем вводится в сейсмоприемник Gb, таким образом встряхивая сейсмоприемник Gc вместе с блоком 710 (как изображено, например, на фиг.7В).
Отклик сейсмоприемника Gc (ebc) тогда может быть выражен следующим образом:

Абсолютные чувствительности трех сейсмоприемников могут быть определены посредством решения уравнений
Вариант осуществления на фиг.7А-7В иллюстрирует одну реализацию проверки калибровки методом взаимности, используя горизонтальную конфигурацию. Согласно альтернативной реализации настоящего изобретения проверка калибровки методом взаимности также может выполняться с использованием вертикальной конфигурации. В таком варианте осуществления сейсмоприемники могут располагаться вертикально, и возбуждение прикладывается в вертикальном направлении.
Дополнительные подробности, относящиеся к методике проверки калибровки методом взаимности, можно найти в ссылке «The Reciprocity Calibration of Piezoelectric Accelerometers», Mark Harrison, A.O. Sykers and Paul G. Marcotte, THE JOURNAL OF THE ACCOUSTICAL SOCIETY OF AMERICA, Volume 24, Number 4, July, 1952, включенной в данный документ по ссылке во всей своей полноте для всех целей.
Подробное описание различных вариантов осуществления методики проверки калибровки методом взаимности для калибровки сейсмоприемников описывается в патенте США №5 644 067 Gabrielson, озаглавленном «APPARATUS AND METHOD FOR CALIBRATION OF SENSING TRANSDUCER», который весь включен в данный документ для всех целей.
Другие факторы, оказывающие влияние на калибровку сейсмоприемников
Исследования, проведенные автором настоящего изобретения, позволили обнаружить, что измерения отклика сейсмоприемника зависят не только от свойств его внутреннего отклика, но также от внешних. факторов, таких как, например, температура и наклон сейсмоприемника. Например, сопротивление (r) постоянному току сейсмоприемника является функцией температуры и отклика сейсмоприемника а также является функцией температуры. Более конкретно, рассматривая электрическую схему, показанную на фиг.2, на чувствительность сейсмоприемника может оказывать влияние изменение сопротивления r катушки, как показано уравнением (6) (выше). Чувствительность разомкнутой цепи также может снижаться под действием температуры, как показано, например, на фиг.7. Температура также оказывает влияние на параметры демпфирования разомкнутой цепи. На отклик сейсмоприемника также может оказывать влияние его наклон. Кроме того, если сейсмоприемник используется под наклоном, смещение внутренних пружин может изменять собственную частоту сейсмоприемника.
Проблемы подвижной массы
В дополнение к вышеописанным факторам, которые могут оказывать влияние на измерения отклика и/или свойства отклика сейсмоприемника, понятно, что многие из вышеописанных методик калибровки сейсмоприемника и проверки свойств отклика сейсмоприемника зависят от использования известных значений для различных свойств сейсмоприемника с целью определения значений для неизвестных свойств сейсмоприемника. Например, как описано ранее, по меньшей мере часть вышеописанных методик проверки калибровки сейсмоприемника и методик проверки свойств отклика сейсмоприемника зависят от использования предварительно известного значения для величины подвижной массы (m) сейсмоприемника. Как описано ранее в отношении фиг.1, подвижные катушки 12, 13, бобина 14 и подвесные пружины 20, 22 вместе образуют часть (m) подвижной массы сейсмоприемника 10. Обычно значение для m соответствует номинальному значению подвижной массы, которое предоставляется изготовителем. Одной методикой, которая может использоваться изготовителями для определения значения подвижной массы сейсмоприемника, является вычисление значения подвижной массы посредством сложения вместе предполагаемых или средних значений массы для каждого индивидуального компонента (например, подвижной катушки, бобины, подвесных пружин), которые вместе образуют подвижную массу.
Так как изготовители сейсмоприемников обычно предоставляют значения для номинальных свойств отклика сейсмоприемника и предоставляют гарантии, что свойства отклика находятся в пределах заданных областей допустимых значений, является общепринятым в промышленности при выполнении проверок калибровки сейсмоприемника полагаться на номинальное значение подвижной массы, которое предоставляется изготовителем. Кроме того, точное вычисление значения подвижной массы сейсмоприемника является очень сложным для уточнения. Одной причиной этого является то, что подвижная масса состоит из нескольких различных (и чувствительных) компонентов внутри сейсмоприемника, которые обычно являются недоступными для пользователя. Другой причиной является то, что трудно определить точную часть подвижной массы подвесных пружин, которые вносят вклад в значение подвижной массы сейсмоприемника.
Кроме того, традиционно не было потребности или желания выполнять независимые измерения значений подвижной массы сейсмоприемника, так как традиционно в промышленности не было осознания возможности того, что ошибки в значениях подвижной массы сейсмоприемника могут в значительной степени вносить вклад в ошибки калибровки сейсмоприемника и/или показатели отклика сейсмоприемника. В результате для специалиста в данной области техники не было стимула для измерения значения подвижной массы сейсмоприемника со степенью точности, которая больше, чем точность номинального значения, предоставленного изготовителем.
Однако в противоположность общепринятой практике автор настоящего изобретения обнаружил, что ошибки в значениях номинальной подвижной массы сейсмоприемника могут, фактически, вносить существенный вклад в ошибки калибровки сейсмоприемника и/или показатели отклика сейсмоприемника. Следовательно, одной методикой улучшения измерений калибровки сейсмоприемника и/или методиками компенсирования отклика сейсмоприемника является выполнение точного измерения свойств подвижной массы сейсмоприемника. Согласно по меньшей мере одному варианту осуществления настоящего изобретения величина подвижной массы может измеряться и использоваться для определения и/или компенсирования различных показателей отклика сейсмоприемника. При одной реализации измеренная величина подвижной массы может использоваться для более точного определения свойств отклика сейсмоприемника (таких как, например, собственная частота, коэффициент демпфирования, чувствительность и т.д.), используя, например, одну или несколько методик проверки свойств отклика сейсмоприемника.
Согласно частному варианту осуществления настоящего изобретения одной методикой для улучшения измерений калибровки сейсмоприемника и/или методик компенсирования отклика сейсмоприемника является определение подвижной массы посредством измерения массы подвижной катушки, бобины и подвесных пружин перед изготовлением сейсмоприемника и штампования определенного значения подвижной массы на сейсмоприемнике. Таким образом, фактическое значение подвижной массы для каждого сейсмоприемника может уточняться и использоваться для последующих операций. Эта методика отличается от традиционных методик, которые используют предполагаемое изготовителем или номинальное значение подвижной массы. Кроме того, посредством использования более точного значения подвижной массы также может быть получена большая точность параметров отклика сейсмоприемника, например, используя импедансный способ, описываемый уравнениями (9), (11) и (12).
Согласно альтернативному варианту осуществления настоящего изобретения другой методикой, которая может использоваться для определения величины подвижной массы сейсмоприемника, является вычисление значения подвижной массы сейсмоприемника, используя по меньшей мере часть значений параметров отклика сейсмоприемника, которые были определены, используя одну или несколько из вышеописанных методик проверки свойств отклика сейсмоприемника. Например, согласно одной реализации значение подвижной массы может вычисляться с использованием измеренных или вычисленных значений коэффициента демпфирования, собственной частоты и чувствительности разомкнутой цепи сейсмоприемника, как описано в уравнениях

или
где m0 соответствует абсолютной подвижной массе,
ζ0 соответствует коэффициенту демпфирования разомкнутой цепи,
S0 соответствует чувствительности разомкнутой цепи,
Sg соответствует чувствительности разомкнутой цепи, выведенной из номинальной подвижной массы,
ω1 соответствует угловой частоте первого измерения,
Im(Z) соответствует мнимой части импеданса,
ω0 соответствует собственной частоте.
В одной реализации чувствительность разомкнутой цепи сейсмоприемника может быть определена, например, посредством измерения и/или посредством использования методики динамической проверки калибровки. Коэффициент демпфирования и собственная частота сейсмоприемника могут быть определены, например, используя методику импедансной проверки калибровки. Согласно различным вариантам осуществления для измерений, включающих в себя методику динамической проверки калибровки, значения параметров отклика для эталонного датчика или эталонного сейсмоприемника могут быть получены, используя многочисленные другие методики, такие как, например, посредством: (1) производства эталонного сейсмоприемника посредством измерения подвижной массы (например, посредством взвешивания подвижной катушки и записи значения подвижной массы перед изготовлением эталонного датчика); (2) использования эталонного датчика, который соответствует государственному измерительному эталону, такому как, например, эталону Национальной научно-исследовательской лаборатории метрологии Японии (http://www/nrlm.go.jp/English/); (3) использования методики проверки калибровки методом взаимности и т.д.
Согласно по меньшей мере одной реализации значение подвижной массы является постоянным, которое не меняется с изменением температуры или наклона сейсмоприемника. Таким образом, если известна подвижная масса, сейсмоприемник может проверяться на месте в любой момент времени, используя одну или несколько из вышеописанных методик. Кроме того, понятно, что методика настоящего изобретения предусматривает повышенную точность калибровки сейсмоприемника, которая может выполняться на месте или перед применением в полевых условиях.
Компенсирование отклика сейсмоприемника
Понятно, что методика настоящего изобретения может использоваться для более точного количественного определения параметров отклика сейсмоприемника, таких как, например, чувствительность, демпфирование и/или собственная частота. Например, посредством использования более точного, вычисленного значения подвижной массы импедансная проверка может использоваться для более точного количественного определения параметров отклика сейсмоприемника, таких как, например, чувствительность разомкнутой цепи, демпфирование разомкнутой цепи и/или собственная частота. Следовательно, повышенная точность параметров отклика сейсмоприемника не только дает возможность выполнять калибровку сейсмоприемника с большей точностью, но также предусматривает большую. точность методик компенсирования отклика сейсмоприемника.
Согласно различным вариантам осуществления настоящего изобретения множество различных методик компенсирования отклика сейсмоприемника может использоваться для достижения большей точности показателей отклика и/или измерений сейсмоприемника. Например, в по меньшей мере одной реализации значения параметров отклика сейсмоприемника (которые, например, могут определяться во время калибровки сейсмоприемника) используются для компенсирования и/или преобразования выходного сигнала(ов) отклика сейсмоприемника таким образом, который обеспечивает большую точность и/или лучше аппроксимирует показатели идеального отклика сейсмоприемника. Согласно другим вариантам осуществления такие показатели идеального отклика сейсмоприемника могут включать в себя, например, сигналы отклика сейсмоприемника, которые проявляют показатели с нулевой фазой, сигналы отклика сейсмоприемника, которые проявляют показатели симметрии, и т.д.
Согласно частному варианту осуществления настоящего изобретения передаточная функция может использоваться для преобразования выходного сигнала(ов) отклика сейсмоприемника таким образом, который лучше аппроксимирует показатели идеального отклика сейсмоприемника. В одной реализации передаточная функция может выводиться с использованием информации, относящейся к значениям параметров отклика сейсмоприемника. Так как передаточная функция идеального отклика сейсмоприемника также известна (например, для сейсмоприемника со следующими свойствами: собственная частота = 10 Гц, чувствительность разомкнутой цепи = 30 В/м/с, демпфирование разомкнутой цепи = 0,4, сопротивление постоянному току = 375 Ом, эффективная подвижная масса = 10 грамм), тогда можно передавать или преобразовывать сигналы отклика сейсмоприемника в идеальный отклик сейсмоприемника. Примерное преобразование может быть реализовано с использованием следующего уравнения:

где H соответствует передаточной функции сейсмоприемника,
fn соответствует номинальной собственной резонансной частоте (например, 10 Гц),
ζn соответствует номинальному коэффициенту демпфирования (например, 0,7),
Sn соответствует номинальной чувствительности,
DCRn соответствует номинальному сопротивлению постоянному току (DCR), при котором задаются номинальные параметры отклика,
fm соответствует измеренной собственной частоте в рабочей среде,
ζm соответствует измеренному коэффициенту демпфирования в рабочей среде,
Sm соответствует измеренной чувствительности в рабочей среде,
DCRm соответствует измеренному DCR, при котором сейсмоприемник измеряет сейсмические сигналы,
Sign соответствует компенсированному сигналу,
Sigm соответствует измеренному сигналу в рабочих условиях.
Согласно различным вариантам осуществления методика компенсирования отклика сейсмоприемника настоящего изобретения может применяться к индивидуальным сейсмоприемникам, а также к группам сейсмоприемников. Например, в одной реализации методика компенсирования отклика сейсмоприемника настоящего изобретения может применяться к группе сейсмоприемников, используя, например, значение подвижной массы, которое представляет среднее значение подвижной массы группы сейсмоприемников. Кроме того, даже в тех ситуациях, где определяется, что выбранные сейсмоприемники выходят за пределы допустимых значений, методика компенсирования отклика сейсмоприемника настоящего изобретения может использоваться для компенсирования выходных данных от сейсмоприемников вне допустимых значений, чтобы преобразовывать такие данные в достоверные используемые данные.
Компенсирование отклика сейсмоприемника для вибросейсмического метода
Фиг.11 графически иллюстрирует, что корреляция вибросейсмического метода с выходными сигналами отклика сейсмоприемника не с нулевой фазой. Однако согласно по меньшей мере одному варианту осуществления настоящего изобретения по меньшей мере одна передаточная функция сейсмоприемника может применяться к оцифрованному опорному свип-сигналу для достижения компенсирования отклика сейсмоприемника для вибросейсмических измерений. Это иллюстрируется, например, на фиг.12-15.
Фиг.12 изображает блок-схему, иллюстрирующую один вариант осуществления того, как методика компенсирования отклика сейсмоприемника настоящего изобретения может применяться к группе сейсмоприемников, которые были размещены для операций вибросейсмических исследований. В этом примере предполагается, что средняя или номинальная передаточная функция отклика сейсмоприемника применяется к опорному сигналу для получения модифицированного опорного сигнала, который затем может коррелироваться с одним или несколькими выходными сигналами отклика сейсмоприемника. В примере, изображенном на фиг.12, операции компенсирования сейсмоприемника могут осуществляться в блоке 1202 компенсирования сейсмоприемника посредством применения, например, следующего уравнения:

где Н соответствует передаточной функции сейсмоприемника,
fn соответствует номинальной собственной частоте (например, 10 Гц),
ζn соответствует номинальному коэффициенту демпфирования (например, 0,7),
Sn соответствует номинальной чувствительности,
DCRn соответствует номинальному сопротивлению постоянному току (DCR), при котором задаются номинальные параметры отклика,
ζm соответствует измеренному коэффициенту демпфирования в рабочей среде,
Sign соответствует компенсированному сигналу,
Sigm соответствует измеренному сигналу в рабочих условиях.
Фиг.13 изображает блок-схему, иллюстрирующую альтернативный вариант осуществления того, как методика компенсирования отклика сейсмоприемника настоящего изобретения может применяться к группе сейсмоприемников, которые были размещены для операций вибросейсмических исследований. Согласно частной реализации индивидуальные функции компенсирования отклика сейсмоприемника могут применяться к соответствующим сейсмоприемникам в группе сейсмоприемников (например, 1304а-с). В примере, изображенном на фиг.13, вибросейсмический опорный сигнал коррелируется с выходными сигналами отклика сейсмоприемника, таким образом генерируя множество коррелированных выходных сигналов. Коррелированные выходные сигналы затем могут модифицироваться, например, посредством осуществления операций компенсирования или коррекции. Согласно одной реализации коррекция соответствующих коррелированных выходных сигналов может осуществляться в каждом блоке 1302а-с коррекции сейсмоприемника посредством применения, например, уравнения (18).
В каждом варианте осуществления, изображенном на фиг.12 и 13, также можно применять компенсационные фильтры, полученные из проверки на месте для всех или выбранных сигналов сейсмоприемника.
Фиг.14 и 15 графически иллюстрируют различия между некомпенсированными сигналами отклика сейсмоприемника и сигналами отклика сейсмоприемника, которые были скомпенсированы с использованием методики компенсирования отклика сейсмоприемника настоящего изобретения. В примере на фиг.14 сигнал 1402 представляет собой коррелированный сигнал отклика сейсмоприемника (соответствующий диапазону частот опорного свип-сигнала 10-100 Гц), для которого не было выполнено компенсирование отклика сейсмоприемника. Сигнал 1404 представляет собой коррелированный сигнал отклика сейсмоприемника (соответствующий диапазону частот опорного свип-сигнала 10-100 Гц), для которого было выполнено компенсирование отклика сейсмоприемника. Как изображено на фиг.14, сигнал 1404 лучше аппроксимирует показатели идеального отклика сейсмоприемника, чем сигнал 1402.
В примере на фиг.15 сигнал 1502 представляет собой коррелированный сигнал отклика сейсмоприемника (соответствующий диапазону частот опорного свип-сигнала 5-50 Гц), для которого не было выполнено компенсирование отклика сейсмоприемника. Сигнал 1504 представляет коррелированный сигнал отклика сейсмоприемника (соответствующий диапазону частот опорного свип-сигнала 5-50 Гц), для которого было выполнено компенсирование отклика сейсмоприемника. Как изображено на фиг.15, сигнал 1504 лучше аппроксимирует показатели идеального отклика сейсмоприемника, чем сигнал 1502.
Понятно, что методика настоящего изобретения может использоваться для минимизирования фазы коррелированных сигналов отклика сейсмоприемника. Кроме того, используя методику компенсирования отклика сейсмоприемника настоящего изобретения, может быть получена действительно нулевая фаза для коррелированных сигналов отклика сейсмоприемника.
Определение параметров отклика сейсмоприемника
Нижеследующий раздел предоставляет более подробное описание различных методик, которые могут использоваться для получения повышенной точности при измерении параметров отклика сейсмоприемника.
Как раннее описано, измеренные значения многих параметров отклика сейсмоприемника (таких как, например, собственная частота, коэффициент демпфирования, чувствительность, сопротивление постоянному току и т.д.) зависят от внешних факторов, таких как, например, температура и наклон сейсмоприемника. Посредством измерения сопротивления постоянному току (DCR) при рабочих условиях можно определить фактическую температуру или температуру реального времени сейсмоприемника. Если была определена температура реального времени сейсмоприемника, значения других параметров отклика (например, коэффициент демпфирования, чувствительность и собственная частота) сейсмоприемника затем могут быть точно вычислены для фактической рабочей температуры сейсмоприемника.
Например, для стандартной медной магнитной проволоки DCR может быть выражено как функция температуры следующим образом:

где Cr=(0.393%)/°C.
В методике импедансной проверки калибровки для выполнения калибровки сейсмоприемника DCR обычно измеряется мультиметром. Затем может использоваться методика проверки калибровки для вычисления собственной частоты, демпфирования разомкнутой цепи и чувствительности. Однако автор настоящего изобретения определил, что независимое измерение DCR (полученное, например, проверкой мультиметром) может приводить к вычислению многочисленных возможных значений для коэффициента демпфирования и чувствительности. Следовательно, по меньшей мере в одном варианте осуществления значение DCR может вычисляться или измеряться с использованием методики импедансной проверки калибровки. Ниже кратко описывается то, как калибруются четыре параметра отклика сейсмоприемника посредством накачки сигналов на двух различных частотах. Более конкретно, согласно частному варианту осуществления значения для четырех неизвестных параметров отклика сейсмоприемника, а именно DCR (r), собственная частота (ω0), коэффициент демпфирования (ζ0) и чувствительность (S0), могут определяться посредством решения четырех уравнений импеданса, выведенных из двух измерений импеданса, используя две различные частоты w1 и w2.
Фиг.16 изображает схематическое представление 1600, которое может использоваться для описания частного варианта осуществления методики импедансной проверки калибровки. Как изображено на фиг.16, ток (i) протекает по части 1602 подвижной катушки, которая подвешена в магнитном потоке В (не показан). Сила F, действующая на подвижную катушку, может быть выражена как F=Bli, где В представляет собой плотность магнитного потока, 1 представляет собой эффективную длину проволоки подвижной катушки в магнитном потоке В и i представляет собой ток.
Уравнение движения для подвижной катушки может быть выражено как

где ξ представляет собой относительное положение подвижной катушки внутри сейсмоприемника. Первый член в левой части уравнения (А1) представляет собой силу инерции, второй член представляет собой силу трения, пропорциональную скорости, и последний член представляет собой силу сжатия пружины. Сумма этих трех сил уравновешивает силу, обусловленную электрическим током.
Подвижная катушка генерирует электрический сигнал eg, пропорциональный скорости движения относительно магнитного поля, который может быть выражен как
Уравнение (А1) может быть переписано выраженным через eg как

где


Так как выходной сигнал сейсмоприемника может быть выражен как

уравнение (A3) может быть переписано выраженным через выходной сигнал сейсмоприемника как

Преобразование Лапласа уравнения (А5) дает импеданс сейсмоприемника:

Уравнение (А6) может быть переписано как
Действительная и мнимая части импеданса могут быть вычислены в соответствии с
Действительная и мнимая части уравнения импеданса могут быть представлены в виде окружности на комплексной плоскости, как показано, например, на фиг.17.
Сумма квадратов уравнений (А8) и (А9) дает выражение

Уравнение (А10) может быть представлено окружностью на фиг.17 с радиусом а, определенным как

Центр с окружности определяется
Вычисление параметров сейсмоприемника может быть выражено
Измерение импеданса на двух частотах ω1 и ω2 дает четыре уравнения для действительной и мнимой частей двух импедансов, как изображается, например, уравнениями (А14) - (А17):
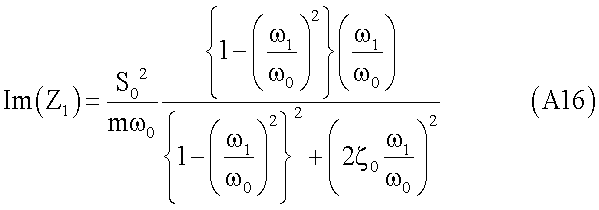
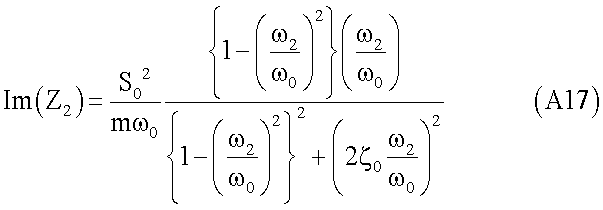
Из этих четырех уравнений можно получить четыре параметра сейсмоприемника: r, ζ0, ω0 и S0.
Вставка Z1 и Z2 в уравнение (A11) дает центр и радиус окружности импеданса.


Сопротивление постоянному току r затем может быть вычислено согласно

Из четырех уравнений (А14) - (А17) импеданса ζ0, ω0 и S0 могут быть определены согласно
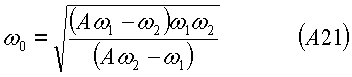
где



Необходимо отметить, что ζ0 и S0 также могут быть определены как


Значения для ζ0 и S0, вычисленные по уравнениям (А13) и (А24), совпадают с величинами, вычисленными по уравнениям (А25) и (А26), при условии, что r вычисляется по уравнениям (А18), (А19) и (А20). Однако, если r измеряется с использованием отдельного прибора, такого как мультиметр, например, тогда значения для ζ0 и S0 могут не совпадать.
Другие варианты осуществления
В общих чертах методики калибровки и компенсирования сейсмоприемника настоящего изобретения могут быть реализованы программными и/или аппаратными средствами. Например, они могут быть реализованы в ядре операционной системы, в отдельном пользовательском процессе, в библиотечном пакете, скомпонованным в сетевое приложение, на специально выполненной машине или на сетевой интерфейсной плате. В частном варианте осуществления данного изобретения методика настоящего изобретения реализуется программными средствами, такими как операционная система или в приложении, выполняющемся в операционной системе.
Программная или программно-аппаратная гибридная реализация методик калибровки и компенсирования сейсмоприемника данного изобретения может быть реализована на программируемой машине общего назначения, селективно активизируемой или реконфигурируемой компьютерной программой, хранимой в памяти. Такая программируемая машина может быть реализована на сетевой хост-машине общего назначения, такой как персональный компьютер или рабочая станция. Далее изобретение может быть, по меньшей мере частично, реализовано на плате (например, интерфейсной плате) для сетевого устройства и вычислительного устройства общего назначения.
Ссылаясь теперь на фиг.18, увидим, что сетевое устройство 60, пригодное для реализации различных аспектов методик калибровки и компенсирования сейсмоприемника настоящего изобретения, включает в себя главное центральное процессорное устройство 62 (ЦПУ), интерфейсы 68 и шину 67 (например, шину межсоединений периферийных компонентов (МПК)). При работе под управлением соответствующего программного или программно-аппаратного обеспечения ЦПУ 62 может отвечать за реализацию конкретных функций, связанных с функциями требуемого сетевого устройства. Например, при конфигурировании в качестве вычислительного устройства общего назначения ЦПУ 62 может отвечать за обработку данных, манипулирование носителями, коммуникацию ввода/вывода, вычисление значений параметров отклика сейсмоприемника, выполнение операций компенсирования отклика сейсмоприемника и т.д. ЦПУ 62 предпочтительно выполняет все эти функции под управлением программного обеспечения, включающего в себя операционную систему (например. Windows NT) и любое соответствующее прикладное программное обеспечение.
ЦПУ 62 может включать в себя один или несколько процессоров 63, таких как процессор из семейства микропроцессоров компании "Моторола" или "Интел" или семейства микропроцессоров без блокировок между ступенями конвейера (MIPS). В альтернативном варианте осуществления процессор 63 представляет собой специально разработанные аппаратные средства для управления работой сетевого устройства 60. В частном варианте осуществления память 61 (такая как энергонезависимое оперативное запоминающее устройство (ОЗУ) и/или постоянное запоминающее устройство (ПЗУ)) также составляет часть ЦПУ 62. Однако существует множество различных путей, которыми память может связываться с системой. Блок 61 памяти может использоваться для многочисленных целей, таких как, например, кэширование и/или хранение данных, программирование инструкций и т.д.
Интерфейсы 68 обычно предусматриваются в виде интерфейсных плат (иногда упоминаемых как «линейные платы»). В основном они управляют посылкой и приемом пакетов данных по сети и иногда поддерживают другие периферийные устройства, используемые с сетевым устройством 60, такие как, например, устройства 70 отображения и/или устройства 72 печати. Понятно, что различные методики калибровки и компенсирования сейсмоприемника настоящего изобретения могут генерировать данные или другую информацию, подлежащую представлению для отображения на электронных устройствах отображения и/или неэлектронных устройствах отображения (таких как, например, отпечатываемые для отображения на бумаге).
Примеры других типов интерфейсов, которые могут быть предусмотрены, представляют собой Ethernet интерфейсы, интерфейсы ретрансляции кадров, кабельные интерфейсы, интерфейсы цифровой абонентской линии (DSL), интерфейсы кольцевой сети с маркерным доступом и т.п. Кроме того, могут быть предусмотрены многочисленные высокоскоростные интерфейсы, такие как интерфейсы быстрого Ethernet, интерфейсы Gigabit Ethernet, интерфейсы асинхронного режима передачи (ATM), интерфейсы высокоскоростного последовательного интерфейса (HSSI), POS интерфейсы, интерфейсы распределенного интерфейса передачи данных по волоконно-оптическим каналам (FODI) и т.п. В основном эти интерфейсы могут включать в себя порты, пригодные для передачи данных с соответствующими средами передачи данных. В некоторых случаях они также могут включать в себя независимый процессор и, в некоторых случаях, энергозависимое ОЗУ. Независимые процессоры могут использоваться, например, для оперирования задачами по обработке данных, задачами по отображению, задачами по передаче данных, задачами по управлению средами передачи и т.д.
Хотя система, показанная на фиг.18, иллюстрирует одно конкретное сетевое устройство настоящего изобретения, это никоим образом не является единственной архитектурой сетевых устройств, на которой может быть реализовано настоящее изобретение. Например, часто используется архитектура, имеющая единственный процессор, который обрабатывает передачи данных, а также вычисления по маршрутизации, и т.д. Далее другие типы интерфейсов и сред передачи данных также могут использоваться с сетевым устройством.
Независимо от конфигурации сетевого устройства оно может использовать одно или несколько устройств памяти или модулей памяти (таких как, например, блок 65 памяти), сконфигурированных для хранения данных, программных инструкций для сетевых операций общего назначения и/или другой информации, относящейся к функциональным возможностям описанных в данном документе методик калибровки и компенсирования сейсмоприемника. Программные инструкции, например, могут управлять работой операционной системы и/или одного или нескольких приложений. Устройство или устройства памяти также могут конфигурироваться для хранения структур данных, сейсмокаротажной информации, информации о параметрах отклика сейсмоприемника, информации о вибросейсмических исследованиях и/или другой описанной в данном документе специальной непрограммной информации.
Так как такая информация и программные инструкции могут применяться для реализации описанных в данном документе систем/способов, настоящее изобретение относится к считываемым машиной носителям, которые включают в себя программные инструкции, информацию о состоянии и т.д., для выполнения различных операций, описанных в данном документе. Примеры считываемых машиной носителей включают в себя, но не ограничиваются ими: магнитные носители, такие как жесткие диски, гибкие диски и магнитная лента; оптические носители, такие как компакт-диски; магнитооптические носители, такие как флоптические диски; и аппаратные устройства, которые специально конфигурируются для хранения и выполнения программных инструкций, такие как постоянные запоминающие устройства (ПЗУ) и оперативные запоминающие устройства (ОЗУ). Изобретение также может быть осуществлено на несущей волне, распространяющейся по соответствующей среде передачи данных, такой как радиоволны, оптические линии связи, линии электропередачи и т.д. Примеры программных инструкций включают в себя как машинный код, такой как создаваемый компилятором, так и файлы, содержащие код более высокого уровня, который может выполняться компьютером с использованием интерпретатора.
Хотя несколько предпочтительных вариантов осуществления данного изобретения были подробно описаны в данном документе с ссылкой на прилагаемые чертежи, необходимо понимать, что изобретение не ограничивается этими отдельно взятыми вариантами осуществления, и что различные изменения и модификации могут быть выполнены в нем специалистом в данной области техники без отступления от объема и сущности изобретения, определенного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2562748C1 |
| Способ вибросейсмической разведки | 1980 |
|
SU940095A1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2017 |
|
RU2644442C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2015 |
|
RU2593782C1 |
| Резонансный сейсмоприемник | 1989 |
|
SU1679440A1 |
| СПОСОБ ШИРОКОПОЛОСНОЙ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ НА ОСНОВЕ ПРИМЕНЕНИЯ ОПТИМАЛЬНЫХ НЕЛИНЕЙНЫХ СИГНАЛОВ | 2019 |
|
RU2708895C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2016 |
|
RU2627549C1 |
| Способ определения собственной частоты и степени затухания низкочастотного сейсмического приемника | 1976 |
|
SU603931A1 |
| СПОСОБ ВЫБОРА ПАРАМЕТРОВ ДИНАМИЧЕСКИХ ИСТОЧНИКОВ ДЛЯ ПОЛУЧЕНИЯ ДАННЫХ СЕЙСМИЧЕСКИХ ВИБРАТОРОВ | 2008 |
|
RU2450291C2 |
| ПОСТОЯННЫЙ СКВАЖИННЫЙ РЕЗОНАНСНЫЙ ИСТОЧНИК | 2004 |
|
RU2330309C2 |

Изобретение относится к области сейсморазведки, а именно к средствам для определения параметров сейсмоприемников. Изобретение позволяет оптимизировать процедуру проверки калибровки сейсмоприемников, а следовательно, повысить точность сейсморазведочных измерений. Предложенный способ определения величины подвижной массы сейсмоприемника включает в себя: выполнение по меньшей мере одной проверки калибровки сейсмоприемника с целью определения значений для по меньшей мере части первых параметров отклика, связанных с сейсмоприемником; определение, используя первые параметры отклика, значения параметра подвижной массы для сейсмоприемника; причем значение параметра подвижной массы представляет величину подвижной массы, связанной с сейсмоприемником. В рамках предложенного решения также раскрыты способ определения параметров отклика сейсмоприемника, способ обработки сейсморазведочной информации, а также устройства для реализации вышеуказанных способов. 8 н. и 33 з.п. ф-лы, 22 ил.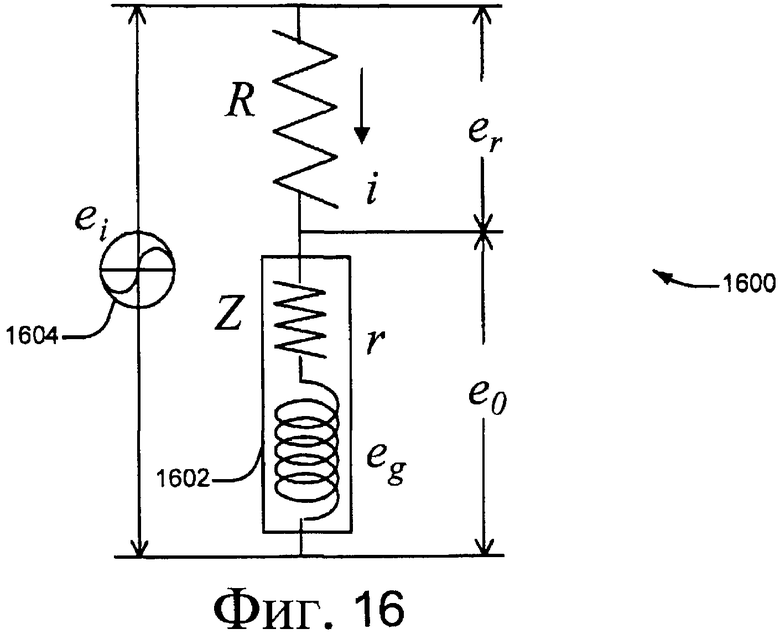
1. Способ определения величины подвижной массы сейсмоприемника, выполненного или разработанного с возможностью использования в сейсморазведочной деятельности с целью компенсирования сейсмических данных для отклика сейсмоприемника, причем способ содержит:
выполнение по меньшей мере одной проверки калибровки сейсмоприемника с целью определения значений для по меньшей мере части первых параметров отклика, связанных с сейсмоприемником;
определение, используя первые параметры отклика, значения параметра подвижной массы для сейсмоприемника; и
причем значение параметра подвижной массы представляет величину подвижной массы, связанной с сейсмоприемником.
2. Способ по п.1, в котором первые параметры отклика включают в себя чувствительность разомкнутой цепи, коэффициент демпфирования и собственную частоту.
3. Способ по п.1, в котором подвижная масса сейсмоприемника включает в себя:
по меньшей мере одну подвижную катушку;
бобину; и
по меньшей мере одну подвесную пружину.
4. Способ по п.1, дополнительно содержащий выполнение по меньшей мере одного из: импедансной проверки калибровки, импульсной проверки калибровки и ступенчатой проверки калибровки сейсмоприемника с целью определения значений для по меньшей мере одного из первых параметров отклика.
5. Способ по п.1, дополнительно содержащий выполнение динамической проверки калибровки сейсмоприемника с целью определения значений для по меньшей мере одного из параметров первого отклика.
6. Способ по п.1, дополнительно содержащий выполнение проверки калибровки методом взаимности сейсмоприемника с целью определения значений для по меньшей мере одного из первых параметров отклика.
7. Способ по п.1, дополнительно содержащий:
определение значения чувствительности разомкнутой цепи для сейсмоприемника;
определение значения коэффициента демпфирования для сейсмоприемника;
определение значения собственной частоты для сейсмоприемника; и
вычисление значения параметра подвижной массы, используя значение чувствительности разомкнутой цепи, значение коэффициента демпфирования и значение собственной частоты.
8. Способ по п.1, дополнительно содержащий:
определение передаточной функции, основываясь на информации, относящейся по меньшей мере к части вторых параметров отклика, причем вторые параметры отклика включают в себя по меньшей мере один параметр отклика, выбранный из группы, состоящей из: чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты; и
модифицирование выходной информации об отклике сейсмоприемника, используя передаточную функцию.
9. Способ по п.8, дополнительно содержащий использование значения параметра подвижной массы с целью модифицирования выходной информации об отклике сейсмоприемника.
10. Способ по п.8, дополнительно содержащий вычисление значения параметра подвижной массы, используя чувствительность разомкнутой цепи, коэффициент демпфирования и собственную частоту.
11. Способ по п.8, дополнительно содержащий модифицирование выходного сигнала отклика сейсмоприемника в соответствии с

где H соответствует передаточной функции сейсмоприемника,
fn соответствует номинальной собственной частоте,
ζn соответствует номинальному коэффициенту демпфирования,
Sn соответствует номинальной чувствительности,
DCRn соответствует номинальному сопротивлению постоянному току, при котором задаются номинальные параметры отклика,
fm соответствует измеренной собственной частоте в рабочей среде,
ζm соответствует измеренному коэффициенту демпфирования в рабочей среде,
Sm соответствует измеренной чувствительности в рабочей среде,
DCRm соответствует измеренному сопротивлению постоянному току,
Sign соответствует компенсированному сигналу,
Sigm соответствует измеренному сигналу при рабочих условиях.
12. Способ по п.8, дополнительно содержащий:
определение, что сейсмоприемник находится вне допустимых значений, причем выходная информация об отклике сейсмоприемника, генерируемая сейсмоприемником, является недостоверной, так как она в значительной степени является неточной;
модифицирование выходной информации об отклике сейсмоприемника с целью получения модифицированной выходной информации об отклике сейсмоприемника, которая является достоверной, так как она в значительной степени является точной.
13. Способ по п.1, в котором выходная информация об отклике сейсмоприемника генерируется по меньшей мере одним сейсмоприемником во время операций вибросейсмических исследований, причем способ дополнительно содержит модифицирование выходной информации об отклике сейсмоприемника, используя информацию о калибровке сейсмоприемника, генерируемую во время проверки калибровки по меньшей мере одного сейсмоприемника.
14. Способ определения параметров отклика сейсмоприемника, выполненного или разработанного с возможностью использования в сейсморазведочной деятельности, с целью компенсирования сейсмических данных для отклика сейсмоприемника, причем способ содержит
размещение сейсмоприемника в скважинной среде, причем сейсмоприемник включает в себя корпус, пружину, магнит и пару катушек;
измерение значения сопротивления постоянному току сейсмоприемника при рабочих условиях;
определение, используя измеренное значение сопротивления постоянному току, значения текущей температуры сейсмоприемника; и
определение по меньшей мере части параметров отклика сейсмоприемника, используя значение текущей температуры.
15. Способ по п.14, дополнительно содержащий:
вычисление значения чувствительности разомкнутой цепи для сейсмоприемника, используя значение текущей температуры;
вычисление значения коэффициента демпфирования для сейсмоприемника, используя значение текущей температуры;
вычисление значения собственной частоты для сейсмоприемника, используя значение текущей температуры; и
компенсирование отклика сейсмоприемника, используя вычисленные параметры отклика сейсмоприемника.
16. Способ определения параметров отклика сейсмоприемника, выполненного или разработанного с возможностью использования в сейсморазведочной деятельности, для компенсирования сейсмических данных для отклика сейсмоприемника, причем способ содержит:
измерение значения сопротивления постоянному току сейсмоприемника при рабочих условиях, причем сейсмоприемник размещается в скважинной среде и содержит корпус, пружину, магнит и пару катушек;
определение, используя измеренное значение сопротивления постоянному току, значения текущей температуры сейсмоприемника;
определение по меньшей мере части параметров отклика сейсмоприемника, используя значение текущей температуры;
определение передаточной функции, основываясь на информации, относящейся по меньшей мере к одному из параметров отклика, причем параметры отклика включают в себя по меньшей мере один параметр отклика, выбранный из группы, состоящей из: чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты; и
модифицирование выходной информации об отклике сейсмоприемника, используя передаточную функцию.
17. Способ по п.16, дополнительно содержащий:
вычисление значения чувствительности разомкнутой цепи для первого сейсмоприемника, используя значение текущей температуры;
вычисление значения коэффициента демпфирования для первого сейсмоприемника, используя значение текущей температуры;
вычисление значения собственной частоты для первого сейсмоприемника, используя значение текущей температуры; и
определение передаточной функции, основываясь на вычисленных значениях для чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты.
18. Способ обработки сейсморазведочной информации, генерируемой в результате сейсморазведочной деятельности, в котором первая часть сейсморазведочной информации включает в себя выходную информацию об отклике сейсмоприемника, генерируемую по меньшей мере одним сейсмоприемником, в котором вторая часть сейсморазведочной информации включает в себя информацию об исходном сигнале, относящуюся к по меньшей мере одному исходному сигналу, используемому при выполнении сейсморазведочной деятельности, причем способ содержит:
определение первой части значений параметров отклика, связанных с первым сейсмоприемником; и
повышение точности сейсморазведочной информации посредством модифицирования по меньшей мере части сейсморазведочной информации с целью компенсирования по меньшей мере одного из первой части значений параметров отклика.
19. Способ по п.18, дополнительно содержащий выполнение по меньшей мере одной проверки калибровки по меньшей мере одного сейсмоприемника с целью определения значений для первой части параметров отклика.
20. Способ по п.18, дополнительно содержащий:
генерирование модифицированной информации об исходном сигнале посредством модифицирования информации об исходном сигнале, используя по меньшей мере одно из первой части значений параметров отклика; и
генерирование информации о коррелированном выходном сигнале, используя модифицированную информацию об исходном сигнале и выходную информацию об отклике сейсмоприемника.
21. Способ по п.18, в котором первая часть значений параметров отклика включает в себя значение чувствительности разомкнутой цепи, значение коэффициента демпфирования и значение собственной частоты.
22. Способ по п.18, в котором первая часть значений параметров отклика включает в себя значение параметра подвижной массы, причем способ дополнительно содержит:
генерирование модифицированной информации об исходном сигнале посредством модифицирования информации об исходном сигнале, используя значение параметра подвижной массы; и
генерирование информации о коррелированном выходном сигнале, используя модифицированную информацию об исходном сигнале и выходную информацию об отклике сейсмоприемника.
23. Способ по п.18, дополнительно содержащий:
генерирование информации о коррелированном выходном сигнале, используя информацию об исходном сигнале и выходную информацию об отклике сейсмоприемника; и
генерирование модифицированной информации о коррелированном выходном сигнале посредством модифицирования коррелированного выходного сигнала, используя по меньшей мере одно из первой части значений параметров отклика.
24. Способ по п.23, в котором первая часть значений параметров отклика включает в себя значение чувствительности разомкнутой цепи, значение коэффициента демпфирования и значение собственной частоты.
25. Способ по п.23, в котором первая часть значений параметров отклика включает в себя значение параметра подвижной массы, причем способ дополнительно содержит:
генерирование информации о коррелированном выходном сигнале, используя информацию об исходном сигнале и выходную информацию об отклике сейсмоприемника; и
генерирование модифицированной информации о коррелированном выходном сигнале посредством модифицирования коррелированного выходного сигнала, используя значение параметра подвижной массы.
26. Способ по п.18, дополнительно содержащий:
определение первой передаточной функции для идеального отклика первого сейсмоприемника, основываясь на информации, относящейся к первой части параметров отклика, связанных с первым сейсмоприемником, причем первая часть параметров отклика включает в себя по меньшей мере один параметр отклика, выбранный из группы, состоящей из: чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты; и
модифицирование информации об исходном сигнале, используя первую передаточную функцию.
27. Способ по п.18, дополнительно содержащий:
определение первой передаточной функции для идеального отклика первого сейсмоприемника, основываясь на информации, относящейся к первой части параметров отклика, связанных с первым сейсмоприемником, причем первая часть параметров отклика включает в себя по меньшей мере один параметр отклика, выбранный из группы, состоящей из: чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты; и
модифицирование выходной информации об отклике сейсмоприемника, используя первую передаточную функцию.
28. Способ по п.18, дополнительно содержащий:
определение первой передаточной функции для идеального отклика первого сейсмоприемника, основываясь на информации, относящейся к первой части параметров отклика, связанных с первым сейсмоприемником, причем первая часть параметров отклика включает в себя по меньшей мере один параметр отклика, выбранный из группы, состоящей из: чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты;
генерирование информации о коррелированном выходном сигнале, используя информацию об исходном сигнале и выходную информацию об отклике сейсмоприемника; и
модифицирование информации о коррелированном выходном сигнале, используя первую передаточную функцию.
29. Способ по п.18, в котором информация об исходном сигнале включает в себя информацию об опорном свип-сигнале, относящуюся к операциям вибросейсмических исследований.
30. Способ по п.18, дополнительно содержащий:
измерение значения сопротивления постоянному току первого сейсмоприемника при рабочих условиях;
определение, используя измеренное значение сопротивления постоянному току, значения текущей температуры первого сейсмоприемника; и
вычисление по меньшей мере части параметров отклика первого сейсмоприемника, используя значение текущей температуры.
31. Способ по п.30, дополнительно содержащий:
вычисление значения чувствительности разомкнутой цепи для первого сейсмоприемника, используя значение текущей температуры;
вычисление значения коэффициента демпфирования для первого сейсмоприемника, используя значение текущей температуры; и
вычисление значения собственной частоты для первого сейсмоприемника, используя значение текущей температуры.
32. Способ по п.18, в котором сейсморазведочная деятельность включает в себя операции вибросейсмических исследований и в котором сейсморазведочная информация включает в себя информацию о коррелированном выходном сигнале, генерируемую с использованием выходной информации об отклике сейсмоприемника и информации об исходном сигнале, причем способ дополнительно содержит модифицирование коррелированного выходного сигнала с целью минимизирования фазовых откликов, связанных с коррелированным выходным сигналом.
33. Способ по п.18, в котором сейсморазведочная деятельность включает в себя операции вибросейсмических исследований, и в котором сейсморазведочная информация включает в себя информацию о коррелированном выходном сигнале, генерируемую с использованием выходной информации об отклике сейсмоприемника и информации об исходном сигнале, причем способ дополнительно содержит модифицирование коррелированного выходного сигнала с целью улучшения характеристик симметрии, связанных с коррелированным выходным сигналом.
34. Система для вычисления параметров отклика сейсмоприемника, выполненного или разработанного с возможностью использования в сейсморазведочной деятельности, с целью компенсирования сейсмических данных для отклика сейсмоприемника, причем система содержит:
по меньшей мере один процессор;
по меньшей мере один интерфейс; и
память;
причем система выполнена или разработана с возможностью выполнения по меньшей мере одной проверки калибровки сейсмоприемника с целью определения значений для по меньшей мере части первых параметров отклика, связанных с сейсмоприемником;
система дополнительно выполнена с возможностью определения, используя первые параметры отклика, значения параметра подвижной массы для сейсмоприемника;
в которой значение параметра подвижной массы представляет величину подвижной массы, связанной с сейсмоприемником.
35. Система по п.34, в которой первые параметры отклика включают в себя чувствительность разомкнутой цепи, коэффициент демпфирования и собственную частоту.
36. Система по п.34, в которой подвижная масса сейсмоприемника включает в себя:
по меньшей мере одну подвижную катушку;
бобину; и
по меньшей мере одну подвесную пружину.
37. Система по п.34, в которой выходная информация об отклике сейсмоприемника генерируется по меньшей мере одним сейсмоприемником во время операций вибросейсмических исследований, причем система дополнительно выполнена или разработана с возможностью модифицирования выходной информации об отклике сейсмоприемника, используя информацию о калибровке сейсмоприемника, генерируемую во время проверки калибровки по меньшей мере одного сейсмоприемника.
38. Система для вычисления параметров отклика сейсмоприемника, выполненного или разработанного с возможностью использования в сейсморазведочной деятельности, с целью компенсирования сейсмических данных для отклика сейсмоприемника, причем система содержит:
по меньшей мере один процессор;
по меньшей мере один интерфейс; и
память;
причем система выполнена или разработана с возможностью измерения значения сопротивления постоянному току сейсмоприемника при рабочих условиях, при этом сейсмоприемник размещается в скважинной среде и содержит корпус, пружину, магнит и пару катушек;
определения, используя измеренное значение сопротивления постоянному току, значения текущей температуры сейсмоприемника; и
определения по меньшей мере части параметров отклика сейсмоприемника, используя значение текущей температуры.
39. Система для вычисления параметров отклика сейсмоприемника, выполненного или разработанного с возможностью использования в сейсморазведочной деятельности, с целью компенсирования сейсмических данных для отклика сейсмоприемника, причем система содержит:
по меньшей мере один процессор;
по меньшей мере один интерфейс; и
память;
причем система выполнена или разработана с возможностью измерения значения сопротивления постоянному току сейсмоприемника при рабочих условиях;
определения, используя измеренное значение сопротивления постоянному току, значения текущей температуры сейсмоприемника;
вычисления по меньшей мере части параметров отклика сейсмоприемника, используя значение текущей температуры;
определения передаточной функции, основываясь на информации, относящейся к по меньшей мере одному из параметров отклика, причем параметры отклика включают в себя по меньшей мере один параметр отклика, выбранный из группы, состоящей из: чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты; и
модифицирования выходной информации об отклике сейсмоприемника, используя передаточную функцию.
40. Система по п.39, дополнительно выполненная или разработанная с возможностью:
вычисления значения чувствительности разомкнутой цепи для первого сейсмоприемника, используя значение текущей температуры;
вычисления значения коэффициента демпфирования для первого сейсмоприемника, используя значение текущей температуры;
вычисления значения собственной частоты для первого сейсмоприемника, используя значение текущей температуры; и
определения передаточной функции, основываясь на вычисленных значениях для чувствительности разомкнутой цепи, коэффициента демпфирования и собственной частоты.
41. Система для обработки сейсморазведочной информации, генерируемой в результате сейсморазведочной деятельности, в которой первая часть сейсмической информации включает в себя выходную информацию об отклике сейсмоприемника, генерируемую по меньшей мере одним сейсмоприемником, в которой вторая часть сейсморазведочной информации включает в себя информацию об исходном сигнале, относящуюся к по меньшей мере одному исходному сигналу, используемому при выполнении сейсморазведочной деятельности, причем система содержит:
по меньшей мере один процессор;
по меньшей мере один интерфейс; и
память;
причем система выполнена или разработана с возможностью определения первой части значений параметров отклика, связанных с первым сейсмоприемником; и
система дополнительно выполнена или разработана с возможностью повышения точности сейсморазведочной информации посредством модифицирования по меньшей мере части сейсморазведочной информации с целью компенсирования по меньшей мере одного из первой части значений параметров отклика.
| US 6722203 B1, 20.04.2004 | |||
| US 5724306 A, 03.03.1998 | |||
| US 5774417 A, 30.06.1998 | |||
| US 5644067 A, 01.07.1997 | |||
| US 6658935 B1, 09.12.2003. |

