ю
8 7
I
I
I
с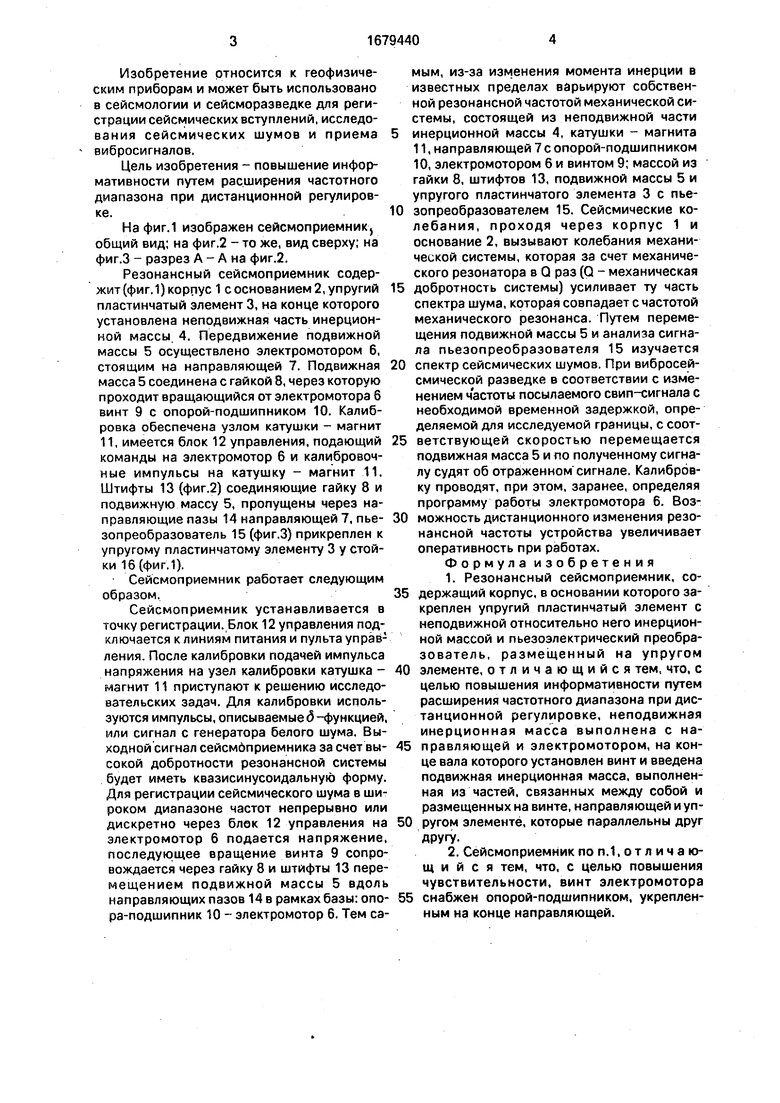
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2808155C1 |
| Способ преобразования сейсмических сигналов и устройство для его реализации | 1976 |
|
SU623168A1 |
| Однокоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2815852C1 |
| СЕЙСМОПРИЕМНИК РЕЗОНАНСНЫЙ СКАНИРУЮЩИЙ | 2016 |
|
RU2635399C1 |
| Сейсмоприемник | 1979 |
|
SU842678A1 |
| Электродинамический сейсмоприемник | 1984 |
|
SU1267318A1 |
| Устройство для компенсации искажений в электродинамических сейсмометрах | 1989 |
|
SU1651257A1 |
| СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 1998 |
|
RU2137158C1 |
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ СЕЙСМИЧЕСКИХ ДАТЧИКОВ | 2015 |
|
RU2599183C1 |
| СЕЙСМОПРИЕМНИК | 1996 |
|
RU2117965C1 |
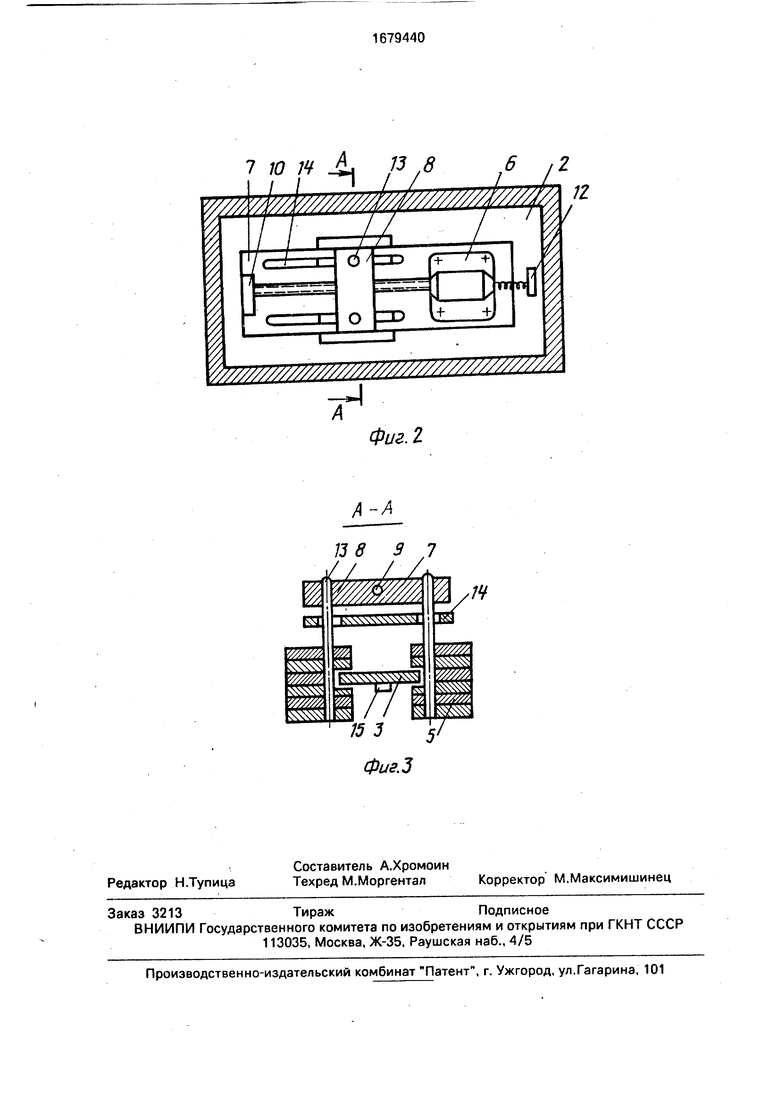
Изобретение относится к геофизическим приборам и может быть использовано в сейсмологии и сейсморазведке. Цель изобретения - повышение информативности путем расширения частотного диапазона при дистанционной регулировке. Резонансный сейсмоприемник содержит корпус 1, на основании которого расположен упругий пластинчатый элемент 3, на котором укреплена неподвижная инерционная масса 4 с электромотором 6 и направляющей 7. Подвижная часть инерционной массы выполнена с возможностью перемещения вдоль винта 9, укрепленного на валу электродвигателя, направляющей и упругого элемента. На упругом элементе укреплен пьезоэле- мент. Винт электромотора снабжен опорой- подшипником 10, укрепленным ка конце направляющей. Калибровка обеспечивается узлом катушка - магнит 11.1 з.п.ф-лы, Зил.
о ю
fc
о
Фиг.1
Изобретение относится к геофизическим приборам и может быть использовано в сейсмологии и сейсморазведке для регистрации сейсмических вступлений, исследо- вания сейсмических шумов и приема вибросигналов.
Цель изобретения - повышение информативности путем расширения частотного диапазона при дистанционной регулировке.
На фиг.1 изображен сейсмоприемник} общий вид; на фиг.2 - то же, вид сверху; на фиг.З - разрез А - А на фиг.2.
Резонансный сейсмоприемник содержит (фиг.1) корпус 1 с основанием 2, упругий пластинчатый элемент 3, на конце которого установлена неподвижная часть инерционной массы. 4. Передвижение подвижной массы 5 осуществлено электромотором 6, стоящим на направляющей 7. Подвижная масса 5 соединена с гайкой 8, через которую проходит вращающийся от электромотора 6 винт 9 с опорой-подшипником 10. Калибровка обеспечена узлом катушки - магнит 11, имеется блок 12 управления, подающий команды на электромотор 6 и калибровочные импульсы на катушку - магнит 11. Штифты 13 (фиг.2) соединяющие гайку 8 и подвижную массу 5, пропущены через направляющие пазы 14 направляющей 7, пье- зопреобразователь 15 (фиг.З) прикреплен к упругому пластинчатому элементу 3 у стойки 16 (фиг.1).
Сейсмоприемник работает следующим образом.
Сейсмоприемник устанавливается в точку регистрации. Блок 12 управления подключается к линиям питания и пульта управления. После калибровки подачей импульса напряжения на узел калибровки катушка - магнит 11 приступают к решению исследовательских задач. Для калибровки используются импульсы, описываемые д -функцией, или сигнал с генератора белого шума. Выходной сигнал сейсмбприемника за счет высокой добротности резонансной системы будет иметь квазисинусоидальную форму. Для регистрации сейсмического шума в широком диапазоне частот непрерывно или дискретно через блок 12 управления на электромотор 6 подается напряжение, последующее вращение винта 9 сопровождается через гайку 8 и штифты 13 перемещением подвижной массы 5 вдоль направляющих пазов 14 в рамках базы: опора-подшипник 10 - электромотор 6. Тем самым, из-за изменения момента инерции в известных пределах варьируют собственной резонансной частотой механической системы, состоящей из неподвижной части
инерционной массы 4, катушки - магнита 11, направляющей 7 с опорой-подшипником 10, электромотором 6 и винтом 9; массой из гайки 8, штифтов 13, подвижной массы 5 и упругого пластинчатого элемента 3 с пье0 зопреобразователем 15. Сейсмические колебания, проходя через корпус 1 и основание 2, вызывают колебания механической системы, которая за счет механического резонатора в Q раз (Q - механическая
5 добротность системы) усиливает ту часть спектра шума, которая совпадает с частотой механического резонанса. Путем перемещения подвижной массы 5 и анализа сигнала пьезопреобразователя 15 изучается
0 спектр сейсмических шумов. При вибросейсмической разведке в соответствии с изменением частоты посылаемого свип-сигнала с необходимой временной задержкой, определяемой для исследуемой границы, с соот5 ветствующей скоростью перемещается подвижная масса 5 и по полученному сигналу судят об отраженном сигнале. Калибровку проводят, при этом, заранее, определяя программу работы электромотора 6. Воз0 можность дистанционного изменения резонансной частоты устройства увеличивает оперативность при работах.
Формула изобретения
0 элементе, отличающийся тем, что, с целью повышения информативности путем расширения частотного диапазона при дистанционной регулировке, неподвижная инерционная масса выполнена с на5 правляющей и электромотором, на конце вала которого установлен винт и введена подвижная инерционная масса, выполненная из частей, связанных между собой и размещенных на винте, направляющей и уп0 ругом элементе, которые параллельны друг другу.
5 снабжен опорой-подшипником, укрепленным на конце направляющей.
7 10 14 -d, P ,8
| Рыкунов Л .Н | |||
| и др | |||
| Аппаратура и методы для исследования слабых сейсмических эффектов | |||
| - М.: ВИНИТИ, № 2919 - 78, 1978 | |||
| Узкополосный сейсмометр | 1980 |
|
SU976414A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
