Область техники, к которой относится изобретение
Настоящее изобретение относится к методике управления для подавления потерь в системе электропитания, оснащенной множеством устройств накопления мощности.
Уровень техники
Выложенный патент (Япония) номер 2003-209969 раскрыл систему управления электропитанием, оснащенную множеством каскадов электропитания. Эта система управления электропитанием включает в себя множество каскадов электропитания, которые соединены между собой параллельно и подают мощность постоянного тока, по меньшей мере, в один инвертор. Каждый каскад электропитания включает в себя аккумулятор и вольтодобавочный/компенсирующий преобразователь постоянного тока.
В этой системе управления электропитанием множество каскадов управляются таким образом, чтобы множество аккумуляторов, включенных в каждый из каскадов электропитания, единообразно заряжались и разряжались, чтобы сохранять выходное напряжение инвертора.
Тем не менее, вышеуказанный Выложенный патент (Япония) номер 2003-209969 просто раскрывает то, что множество каскадов электропитания соединены параллельно и контролируются так, чтобы заряжаться и разряжаться единообразно, и не пояснил подробно способ управления каждым каскадом электропитания для подавления потерь во всей системе управления электропитанием.
Сущность изобретения
Задача изобретения состоит в том, чтобы предоставить систему управления электропитанием, оснащенную множеством устройств накопления мощности и множеством устройств преобразования напряжения, и, в частности, предоставить систему управления электропитанием, которая может подавлять потери, а также транспортное средство, оснащенное системой управления электропитанием.
Другая задача изобретения состоит в том, чтобы предоставить способ управления, который позволяет подавлять потери в системе электропитания, оснащенной множеством устройств накопления мощности и множеством устройств преобразования напряжения.
Дополнительная другая задача изобретения состоит в том, чтобы предоставить машиночитаемый носитель записи, содержащий программу для инструктирования компьютеру осуществлять управление, которое позволяет подавлять потери в системе электропитания, оснащенной множеством устройств накопления мощности и множеством устройств преобразования напряжения.
Согласно изобретению, система электропитания, оснащенная множеством устройств накопления мощности, включает в себя первое и второе устройства преобразования напряжения и блок управления, управляющий первым и вторым устройствами преобразования напряжения. Первое устройство преобразования напряжения размещается между первым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из первого устройства накопления мощности, и предоставления преобразованного напряжения в нагрузочное устройство. Второе устройство преобразования напряжения размещается между вторым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из второго устройства накопления мощности, и предоставления преобразованного напряжения в нагрузочное устройство. Когда необходимая мощность, требуемая от системы электропитания, меньше опорного значения, блок управления управляет первым и вторым устройствами преобразования напряжения так, что одно из первого и второго устройств преобразования напряжения работает, а другое устройство преобразования напряжения останавливается. Когда требуемая мощность равна или превышает опорное значение, блок управления управляет первым и вторым устройствами преобразования напряжения так, что первое и второе устройства преобразования напряжения работают.
Предпочтительно, когда требуемая мощность меньше опорного значения, блок управления останавливает устройство преобразования напряжения, соответствующее одному из первого и второго устройств накопления мощности, предоставляющее меньшее выходное напряжение, чем другое.
Предпочтительно, опорное значение определяется на основе потерь на сопротивление в первом и втором устройствах накопления мощности и потерь на переключение в первом и втором устройствах преобразования напряжения.
Предпочтительно, блок управления изменяет опорное значение таким образом, что опорное значение повышается по мере того, как температура первого и второго устройств накопления мощности становится выше.
Предпочтительно, блок управления изменяет опорное значение таким образом, что опорное значение повышается по мере того, как состояние заряда, представляющее заряженное состояние первого и второго устройств накопления мощности, становится выше.
Предпочтительно, блок управления изменяет опорное значение таким образом, что опорное значение повышается по мере того, как частота переключения первого и второго устройств преобразования напряжения становится выше.
Предпочтительно, одно из первого и второго устройств накопления мощности включает в себя аккумуляторную батарею, а другое из первого и второго устройств накопления мощности включает в себя конденсатор.
Так же, согласно изобретению, транспортное средство включает в себя одну из систем электропитания, описанных выше, устройство возбуждения, снабжаемое электроэнергией из системы электропитания, электрический двигатель, приводимый посредством устройства возбуждения, и колесо, приводимое посредством электродвигателя.
Дополнительно, согласно изобретению, способ управления системой электропитания - это способ для управления системой электропитания, оснащенной множеством устройств накопления мощности. Система электропитания включает в себя первое и второе устройства преобразования напряжения. Первое устройство преобразования напряжения размещается между первым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из первого устройства накопления мощности, и предоставления преобразованного напряжения в нагрузочное устройство. Второе устройство преобразования напряжения размещается между вторым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из второго устройства накопления мощности, и предоставления преобразованного напряжения в нагрузочное устройство. Способ управления системой электропитания включает в себя первый этап сравнения необходимой мощности, требуемой от системы электропитания, с опорным значением; второй этап управления первым и вторым устройствами преобразования напряжения так, что одно из первого и второго устройств преобразования напряжения работает, а другое устройство преобразования напряжения останавливается, когда требуемая мощность меньше опорного значения; и третий этап управления первым и вторым устройствами преобразования напряжения так, что первое и второе устройства преобразования напряжения работают, когда требуемая мощность равна или превышает опорное значение.
Предпочтительно, второй этап включает в себя первый подэтап сравнения выходного напряжения первого устройства накопления мощности с выходным напряжением второго устройства накопления мощности, второй подэтап остановки первого устройства преобразования напряжения, когда выходное напряжение первого устройства накопления мощности ниже выходного напряжения второго устройства накопления мощности, и третий подэтап остановки второго устройства преобразования напряжения, когда выходное напряжение второго устройства накопления мощности ниже выходного напряжения первого устройства накопления мощности.
Предпочтительно, опорное значение определяется на основе потерь на сопротивление в первом и втором устройствах накопления мощности и потерь на переключение в первом и втором устройствах преобразования напряжения.
Предпочтительно, опорное значение устанавливается таким образом, чтобы повышаться по мере того, как температура первого и второго устройств накопления мощности становится выше.
Предпочтительно, опорное значение устанавливается таким образом, чтобы повышаться по мере того, как состояние заряда, представляющее заряженное состояние первого и второго устройств накопления мощности, становится выше.
Предпочтительно, опорное значение устанавливается таким образом, чтобы повышаться по мере того, как частота переключения первого и второго устройств преобразования напряжения становится выше.
Дополнительно, согласно изобретению, носитель записи - это машиночитаемый носитель, сохраняющий программу для инструктирования компьютеру управлять системой электропитания, оснащенной множеством устройств накопления мощности. Система электропитания включает в себя первое и второе устройства преобразования напряжения. Первое устройство преобразования напряжения размещается между первым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из первого устройства накопления мощности, и предоставления преобразованного напряжения в нагрузочное устройство. Второе устройство преобразования напряжения размещается между вторым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из второго устройства накопления мощности, и предоставления преобразованного напряжения в нагрузочное устройство. Носитель записи сохраняет программу для инструктирования компьютеру приводить в исполнение первый этап сравнения необходимой мощности, требуемой от системы электропитания, с опорным значением; второй этап управления первым и вторым устройствами преобразования напряжения так, что одно из первого и второго устройств преобразования напряжения работает, а другое устройство преобразования напряжения останавливается, когда требуемая мощность меньше опорного значения; и третий этап управления первым и вторым устройствами преобразования напряжения так, что первое и второе устройства преобразования напряжения работают, когда требуемая мощность равна или превышает опорное значение.
Согласно изобретению, первое устройство преобразования напряжения размещается между первым устройством накопления мощности и нагрузочным устройством, а второе устройство преобразования напряжения размещается между вторым устройством накопления мощности и нагрузочным устройством. Таким образом, первое и второе устройства преобразования напряжения подключены параллельно к нагрузочному устройству, преобразуют напряжения, предоставляемые из соответствующих устройств накопления мощности, и предоставляют их в нагрузочное устройство, соответственно. Потери на сопротивление в устройстве накопления мощности пропорциональны квадрату тока. Когда мощность, требуемая от системы электропитания, небольшая, потери на переключение в устройстве преобразования напряжения относительно выше, чем потери на сопротивление в устройстве накопления мощности. Соответственно, за счет уменьшения числа устройств преобразования напряжения, которыми следует управлять, потери во всей системе электропитания могут быть подавлены. Когда требуемая мощность значительная, потери на сопротивление могут быть уменьшены посредством управления первым и вторым устройствами преобразования напряжения таким образом, чтобы распределять нагрузку на первое и второе устройства накопления мощности. Посредством этого потери во всей системе электропитания могут быть подавлены. Следовательно, в настоящем изобретении блок управления осуществляет управление таким образом, что одно из первого и второго устройств преобразования напряжения работает, а другое останавливается, когда требуемая мощность меньше опорного значения. Так же, он выполняет управление таким образом, что первое и второе устройства преобразования напряжения работают, когда требуемая мощность равна или превышает опорное значение. Таким образом, в данном изобретении потери во всей системе электропитания могут быть подавлены.
Краткое описание чертежей
Фиг.1 - это полная блок-схема гибридного транспортного средства, представленного как пример транспортного средства, содержащего систему электропитания согласно изобретению.
Фиг.2 - это принципиальная схема, показывающая структуру преобразователя, показанного на фиг.1.
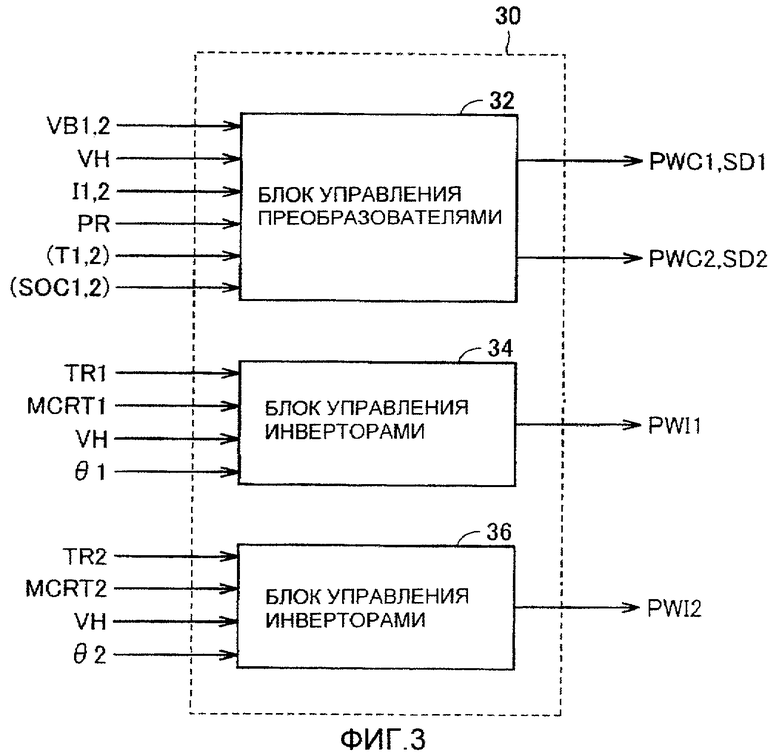
Фиг.3 - это функциональная блок-схема ECU, показанного на фиг.1.
Фиг.4 - это специальная функциональная блок-схема блока управления преобразователем, показанного на фиг.3.
Фиг.5 иллюстрирует взаимосвязь между требуемой мощностью и потерями на сопротивление в устройстве накопления мощности.
Фиг.6 иллюстрирует взаимосвязь между требуемой мощностью и потерями в преобразователе.
Фиг.7 иллюстрирует взаимосвязь между требуемой мощностью и совокупными потерями в устройствах накопления мощности и преобразователях.
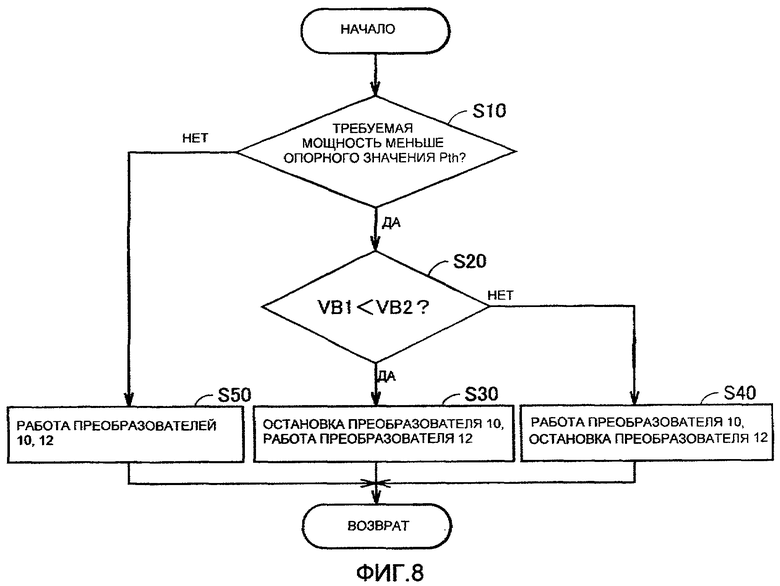
Фиг.8 - это блок-схема, показывающая последовательность операций способа в блоке управления, показанном на фиг.4.
Фиг.9 иллюстрирует взаимосвязь между температурой и внутренним сопротивлением устройства накопления мощности.
Фиг.10 иллюстрирует взаимосвязь между требуемой мощностью и потерями на сопротивление в устройстве накопления мощности.
Фиг.11 иллюстрирует взаимосвязь между температурой устройства накопления мощности и опорным значением.
Фиг.12 иллюстрирует взаимосвязь между SOC и внутренним сопротивлением устройства накопления мощности.
Фиг.13 иллюстрирует взаимосвязь между требуемой мощностью и потерями на сопротивление в устройстве накопления мощности.
Фиг.14 иллюстрирует взаимосвязь между SOC устройства накопления мощности и опорным значением.
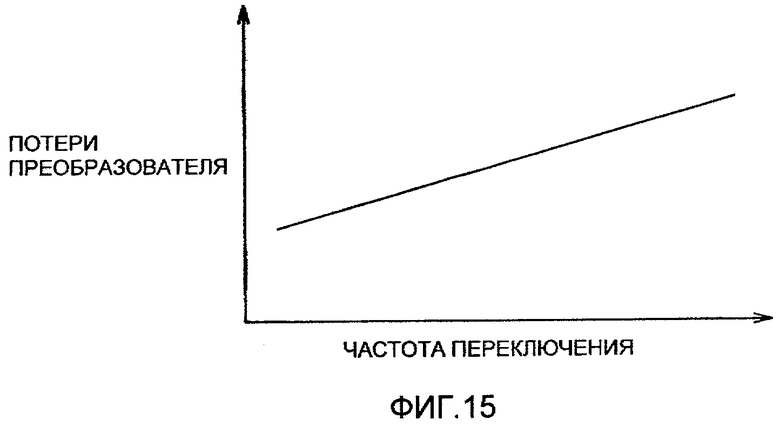
Фиг.15 иллюстрирует взаимосвязь между частотой переключения преобразователя и потерями в преобразователе.
Фиг.16 иллюстрирует взаимосвязь между частотой переключения преобразователя и опорным значением.
Оптимальный режим осуществления изобретения
Далее описываются варианты осуществления изобретения со ссылкой на чертежи. В нижеприведенном описании одинаковые или соответствующие части и компоненты содержат одинаковые номера ссылок, и их описание не повторяется.
(Первый вариант осуществления)
Фиг.1 - это полная блок-схема гибридного транспортного средства, показанного как пример транспортного средства, содержащего систему электропитания согласно изобретению. Ссылаясь на фиг.1, гибридное транспортное средство 100 включает в себя двигатель 2, электродвигатели-генераторы MG1 и MG2, устройство 4 деления мощности и колеса 6. Гибридное транспортное средство 100 также включает в себя устройства В1 и В2 накопления мощности, преобразователи 10 и 12, конденсатор С, инверторы 20 и 22 и ECU (электронный блок управления) 30. Дополнительно, гибридное транспортное средство 100 включает в себя датчики 42, 44 и 46 напряжения, датчики 52 и 54 тока и датчики 62 и 64 температуры.
Гибридное транспортное средство 100 работает с помощью двигателя 2 и электродвигателя-генератора MG2 в качестве источников питания. Устройство 4 деления мощности подключено между двигателем 2 и электродвигателями-генераторами MG1 и MG2 для распределения мощности между ними. Устройство 4 деления мощности сформировано, к примеру, из планетарной передачи, имеющей три оси вращения, т.е. солнечную шестерню, водило планетарной передачи и коронную шестерню, и эти три оси вращения соединены с осями вращения двигателя 2 и электродвигателей-генераторов MG1 и MG2, соответственно. Электродвигатель-генератор MG1 может иметь полый электродвигатель, через который коленвал двигателя 2 идет соосно, так чтобы двигатель 2 и электродвигатели-генераторы MG1 и MG2 могли быть механически подсоединены к устройству 4 деления мощности. Ось вращения электродвигателя-генератора MG2 соединена с колесами 6 посредством понижающей передачи или дифференциальной передачи, которые не показаны.
Электродвигатель-генератор MG1 содержится в гибридном транспортном средстве 100 для работы в качестве генератора, приводимого посредством двигателя 2, а также для работы в качестве электродвигателя, который может запускать двигатель 2. Электродвигатель-генератор MG2 содержится в гибридном транспортном средстве 100 как электрический двигатель, приводящий колеса 6.
Устройства В1 и В2 накопления мощности являются источниками питания постоянного тока, которые могут заряжаться и разряжаться и которые состоят, к примеру, из аккумуляторных батарей, таких как никель-водородные аккумуляторы или литиево-ионные аккумуляторы. Устройство В1 накопления мощности подает электроэнергию в преобразователь 10 и заряжается посредством преобразователя 10 в ходе рекуперации электроэнергии. Устройство В2 накопления мощности подает электроэнергию в преобразователь 12 и заряжается посредством преобразователя 12 в ходе рекуперации электроэнергии.
Например, устройство В1 накопления мощности может состоять из аккумуляторной батареи, имеющей большую максимальную выходную мощность, чем устройство В2 накопления мощности, а устройство В2 накопления мощности может состоять из аккумуляторной батареи, имеющей большую емкость аккумулирования электроэнергии, чем устройство В1 накопления мощности. Таким образом, два устройства В1 и В2 накопления мощности могут формировать высокомощный источник питания постоянного тока с большой емкостью. В качестве одного из устройств В1 и В2 накопления мощности может быть использован конденсатор с большим емкостным сопротивлением.
Преобразователь 10 повышает напряжение, предоставляемое из устройства В1 накопления мощности, на основе сигнала PWC1 из ECU 30 и предоставляет повышенное напряжение в положительную линию PL3. Преобразователь 10 понижает напряжение рекуперативной энергии, подаваемой из инверторов 20 и 22 через положительную линию PL3, до уровня напряжения устройства В1 накопления мощности и заряжает устройство В1 накопления мощности с ее помощью. Так же преобразователь 10 останавливает операцию переключения, когда он принимает сигнал SD1 отключения от ECU 30.
Преобразователь 12 размещается параллельно с преобразователем 10 и подключен к положительным и отрицательным линиям PL3 и NL. Преобразователь 12 повышает напряжение из устройства В2 накопления мощности на основе сигнала PWC2 из ECU 30 и предоставляет повышенное напряжение в положительную линию PL3. Преобразователь 12 понижает рекуперативную энергию, подаваемую через положительную линию PL3 из инверторов 20 и 22, до уровня напряжения устройства В2 накопления мощности на основе сигнала PWC2 и заряжает устройство В2 накопления мощности с ее помощью. Дополнительно, преобразователь 12 останавливает операцию переключения, когда он принимает сигнал SD2 отключения от ECU 30.
Конденсатор С подключен между положительной линией PL3 и отрицательной линией NL для сглаживания изменений напряжения между положительной линией PL3 и отрицательной линией NL.
Инвертор 20 преобразует напряжение постоянного тока, предоставляемое из положительной линии PL3, в трехфазное напряжение переменного тока на основе сигнала PWI1 из ECU 30 и предоставляет преобразованное трехфазное напряжение переменного тока в электродвигатель-генератор MG1. Инвертор 20 преобразует трехфазное напряжение переменного тока, генерируемое посредством электродвигателя-генератора MG1 с помощью электроэнергии двигателя 2, в напряжение постоянного тока на основе сигнала PWI1 и предоставляет напряжение постоянного тока преобразователя в положительную линию PL3.
Инвертор 22 преобразует напряжение постоянного тока, предоставляемое из положительной линии PL3, в трехфазное напряжение переменного тока на основе сигнала PWI2 из ECU 30 и предоставляет преобразованное трехфазное напряжение переменного тока в электродвигатель-генератор MG2. При рекуперативном торможении транспортного средства электродвигатель-генератор MG2, принимающий вращательную энергию от колес 6, формирует трехфазное напряжение переменного тока, и инвертор 20 преобразует таким образом сформированное трехфазное напряжение переменного тока в напряжение постоянного тока на основе сигнала PWI2 и предоставляет преобразованное напряжение переменного тока в положительную линию PL3.
Каждый из электродвигателей-генераторов MG1 и MG2 является трехфазной вращающейся электрической машиной переменного тока и сформирован, к примеру, из трехфазного синхронного электродвигателя-генератора переменного тока. Электродвигатель-генератор MG1 рекуперативно приводится посредством инвертора 20, чтобы предоставлять трехфазное напряжение переменного тока, которое формируется с помощью мощности двигателя 2, в инвертор 20. При операции запуска двигателя 2 подача мощности электродвигателя-генератора MG1 на кривошипный двигатель 2 выполняется посредством инвертора 20. Подача мощности электродвигателя-генератора MG1 выполняется посредством инвертора 22, чтобы сформировать приводную мощность для приведения колес 6. При операции рекуперативного торможения транспортного средства, рекуперативное включение электродвигателя-генератора MG2 выполняется посредством инвертора 22, чтобы сформировать трехфазное напряжение переменного тока с помощью вращательной энергии, предоставляемой с колес 6, и предоставить ее в инвертор 22.
Датчик 42 напряжения измеряет напряжение VB1 устройства В1 накопления мощности и предоставляет его в ECU 30. Датчик 62 температуры измеряет температуру Т1 устройства В1 накопления мощности и предоставляет ее в ECU 30. Датчик 52 тока обнаруживает ток I1, предоставляемый из устройства В1 накопления мощности в преобразователь 10, и предоставляет его в ECU 30. Датчик 44 напряжения обнаруживает напряжение VB2 устройства В2 накопления мощности и предоставляет его в ECU 30. Датчик 64 температуры обнаруживает температуру Т2 устройства В2 накопления мощности и предоставляет ее в ECU 30. Датчик 54 тока обнаруживает ток I2, предоставляемый из устройства В2 накопления мощности в преобразователь 12, и предоставляет его в ECU 30. Датчик 46 напряжения обнаруживает напряжение на клеммах конденсатора С, т.е. напряжение VH на положительной линии PL3 относительно отрицательной линии NL, и предоставляет измеренное напряжение VH в ECU 30.
ECU 30 выводит сигналы PWC1 и PWC2 для приведения преобразователей 10 и 12 и предоставляет эти сигналы PWC1 и PWC2 в преобразователи 10 и 12, соответственно. Дополнительно, ECU 30 выводит сигнал SD1 или SD2 выключения согласно мощности, требуемой от устройств В1 и В2 накопления мощности (которая далее упоминается просто как "требуемая мощность"). ECU 30 предоставляет таким образом сформированный сигнал SD1 или SD2 выключения в преобразователь 10 или 12. Требуемая мощность PR вычисляется посредством ECU транспортного средства (не показан) на основе степени нажатия акселератора и скорости транспортного средства.
Дополнительно, ECU 30 выводит сигналы PWI1 и PWI2 для приведения инверторов 20 и 22, соответственно, и предоставляет эти сигналы PWI1 и PWI2 в инверторы 20 и 22, соответственно.
Фиг.2 - это принципиальная схема, иллюстрирующая структуру преобразователей 10 и 12, показанных на фиг.1. Ссылаясь на фиг.2, преобразователь 10 (12) включает в себя npn-транзисторы Q1 и Q2, диоды D1 и D2 и стабилизатор L. Npn-транзисторы Q1 и Q2 подключены последовательно между положительной линией PL3 и отрицательной линией NL. Диоды D1 и D2 подключены встречно-параллельно к npn-транзисторам Q1 и Q2, соответственно. Один конец стабилизатора L подключен к соединительному узлу между npn-транзсторами Q1 и Q2, а другой конец подключен к положительной линии PL1 (PL2). Npn-транзистор, описанный выше, может быть сформирован, к примеру, из IGBT (биполярного транзистора с изолированным затвором).
Преобразователь 10 (12) сформирован из цепи модулятора-прерывателя. Преобразователь 10 (12) повышает напряжение на положительной линии PL1 (PL2) на основе сигнала PWC1 (PWC2) из ECU 30 (не показан) с помощью стабилизатора L и предоставляет повышенное напряжение в положительную линию PL3.
Более конкретно, преобразователь 10 (12) повышает напряжение на положительной линии PL1 (PL2) посредством накопления тока, который протекает, когда npn-транзистор Q2 включен в стабилизатор L, как энергию магнитного поля. Преобразователь 10 (12) предоставляет повышенное напряжение в положительную линию PL3 через диод D1 синхронного с выключением npn-транзистора Q2.
Фиг.3 - это функциональная блок-схема ECU 30, показанного на фиг.1. Ссылаясь на фиг.3, ECU 30 включает в себя блок 32 управления преобразователем и блоки 34 и 36 управления инверторами.
Блок 32 управления преобразователем формирует сигнал PWM (широтно-импульсной модуляции) для включения/отключения npn-транзисторов Q1 и Q2 преобразователя 10 на основе напряжения VB1 из датчика 42 напряжения, напряжения VH из датчика 46 напряжения и тока II из датчика 52 тока и предоставляет сформированный PWM-сигнал в преобразователь 10 как сигнал PWC1.
Блок 32 управления преобразователем также формирует сигнал PWM (широтно-импульсной модуляции) для включения/отключения npn-транзисторов Q1 и Q2 преобразователя 12 на основе напряжения VB2 из датчика 44 напряжения, напряжения VH и тока 12 из датчика 54 тока и предоставляет сформированный PWM-сигнал в преобразователь 12 как сигнал PWC2.
Дополнительно, блок 32 управления преобразователем формирует сигналы SD1 и SD2 выключения для выключения преобразователей 10 и 12 на основе требуемой мощности PR и напряжений VB1 и VB2 и предоставляет сигналы SD1 и SD2 выключения, сформированные таким образом, в преобразователи 10 и 12, соответственно.
Блок 34 управления инвертором формирует PWM-сигнал для включения/выключения силового транзистора, включенного в инвертор 20, на основе инструкции TR1 крутящего момента, тока MCRT1 электродвигателя и угла θ1 вращения ротора электродвигателя-генератора MG1, а также напряжения VH, и предоставляет сформированный PWM-сигнал в инвертор 20 как сигнал PWI1.
Блок 36 управления инвертором формирует PWM-сигнал для включения/выключения силового транзистора, включенного в инвертор 22, на основе инструкции TR2 крутящего момента, тока MCRT2 электродвигателя и угла θ2 вращения ротора электродвигателя-генератора MG2, а также напряжения VH, и предоставляет сформированный PWM-сигнал в инвертор 22 как сигнал PWI2.
Инструкции TR1 и TR2 крутящего момента вычисляются посредством ECU транспортного средства (не показаны) на основе, к примеру, степени нажатия акселератора, степени нажатия педали тормоза и скорости транспортного средства. Дополнительно, каждый из токов MCRT1 и MCRT2 электродвигателя и углов θ1 и θ2 вращения ротора воспринимаются посредством датчиков (не показаны).
Фиг.4 - это специальная функциональная блок-схема блока 32 управления преобразователем, показанного на фиг.3. Ссылаясь на фиг.4, блок 32 управления преобразователем включает в себя блоки 102 и 104 формирования модулированных волн, блок 106 управления и блоки 108 и 110 формирования приводящих сигналов.
Блок 102 формирования модулированных волн формирует модулированную волну M1, соответствующую преобразователю 10, на основе напряжений VB1 и VH и/или тока I1. Блок 104 формирования модулированных волн формирует модулированную волну М2, соответствующую преобразователю 12, на основе напряжений VB2 и VH и/или тока I2. Блоки 102 и 104 формирования модулированных волн могут формировать модулированные волны Ml и М2 для управления входными токами или выходными напряжениями соответствующих преобразователей, чтобы достигать целевых значений, соответственно. Например, блок 102 формирования модулированных волн может формировать модулированную волну на основе тока I1, так чтобы ток I1 мог управляться так, чтобы достигать предварительно определенного целевого значения. Блок 104 формирования модулированных волн может формировать модулированную волну М2 на основе напряжений VB2 и VH, так чтобы напряжение VH могло управляться так, чтобы достичь предварительно определенного целевого значения.
В способе, который должен быть описан далее, блок 106 управления определяет на основе требуемой мощности PR и напряжений VB1 и VB2 то, должен или нет преобразователь 10 или 20 быть остановлен. Когда блок 106 управления определяет то, что преобразователь 10 должен быть остановлен, он активирует сигнал CTL1, который выводится в блок 108 формирования приводящих сигналов. Когда блок 106 управления определяет то, что преобразователь 12 должен быть остановлен, он активирует сигнал CTL2, который выводится в блок 110 формирования приводящих сигналов.
Когда сигнал CTL1 из блока 106 управления неактивен, блок 108 формирования сигналов возбуждения формирует сигнал PWC1 на основе модулированной волны M1 из блока 102 формирования модулированных волн и предварительно определенного сигнала несущей. Наоборот, когда сигнал CTL1 активен, он выдает сигнал SD1 отключения в преобразователь 10.
Когда сигнал CTL2 из блока 106 управления неактивен, блок 110 формирования сигналов возбуждения формирует сигнал PWC2 на основе модулированной волны М2 из блока 104 формирования модулированных волн и предварительно определенного сигнала несущей. Наоборот, когда сигнал CTL2 активен, он выдает сигнал SD2 отключения в преобразователь 12.
В блоке 32 управления преобразователем блок 106 управления определяет на основе требуемой мощности PR то, должен один из преобразователей 10 и 12 быть остановлен либо оба преобразователя 10 и 12 должны работать. С точки зрения подавления всех потерь в устройствах В1 и В2 накопления мощности и преобразователях 10 и 12 блок 106 управления определяет число преобразователей, которые должны работать. Данный подход будет описан ниже.
Фиг.5 иллюстрирует взаимосвязь между требуемой мощностью PR и потерями на сопротивление в устройствах В1 и В2 накопления мощности. Ссылаясь на фиг.5, сплошная линия k1 представляет потери на сопротивление устройства накопления мощности, соответствующего любому одному из преобразователей 10 и 12, который работает. Пунктирная линия k2 представляет сумму потерь на сопротивление, вызываемых в устройствах В1 и В2 накопления мощности, когда оба преобразователя 10 и 12 работают.
Потери на сопротивление в устройстве накопления мощности возрастают по мере того, как требуемая мощность возрастает. Потери на сопротивление пропорциональны квадрату тока. Следовательно, полные потери на сопротивление в устройствах В1 и В2 накопления мощности могут быть относительно низкими, когда оба преобразователя 10 и 12 работают, а устройства В1 и В2 накопления мощности совместно используют мощность.
Фиг.6 иллюстрирует взаимосвязь между требуемой мощностью PR и потерями в преобразователях 10 и 12. Ссылаясь на фиг.6, сплошная линия k3 представляет потери в любом из преобразователей 10 и 12, который работает. Пунктирная линия k4 представляет сумму потерь, вызываемых в преобразователях 10 и 12, когда оба преобразователя 10 и 12 работают.
Потери в преобразователе формируются из потерь на переключение, вызываемых посредством операций включения/отключения npn-транзисторов Q1 и Q2, а также потерь, обусловленных сопротивлением во включенном состоянии. В зоне, где требуемая мощность является относительно небольшой, потери на переключение являются доминирующими, и потери, обусловленные сопротивлением во включенном состоянии, увеличиваются по мере того, как увеличивается мощность. По меньшей мере, в зоне небольшой требуемой мощности полные потери в преобразователях 10 и 12 могут быть относительно небольшими, когда один из преобразователей 10 и 12 останавливается.
Фиг.7 иллюстрирует взаимосвязь между требуемой мощностью PR и совокупными потерями в устройствах В1 и В2 накопления мощности и преобразователях 10 и 12. Ссылаясь на фиг.7, сплошная линия k5 представляет совокупные потери (сумму потерь в устройствах В1 и В2 накопления мощности и преобразователях 10 и 12), которые возникают, когда только один из преобразователей 10 и 12 работает. Пунктирная линия k6 представляет совокупные потери, которые возникают, когда оба преобразователя 10 и 12 работают. Таким образом, сплошная линия k5 - это сочетание сплошной линии k1 на фиг.5 и сплошной линии k3 на фиг.6, а пунктирная линия k6 - это сочетание пунктирной линии k2 на фиг.5 и пунктирной линии k4 на фиг.6.
В зоне небольшой требуемой мощности, как показано на чертежах, потери (главным образом потери на переключение) в преобразователях являются доминирующими, и способ работы только одного из преобразователей 10 и 12 вызывает совокупные потери, меньшие совокупных потерь, вызываемых посредством работы обоих преобразователей 10 и 12. По мере того как требуемая мощность возрастает, потери на сопротивление в устройствах накопления мощности становятся доминирующими. Когда требуемая мощность превышает определенное значение (Pth), совокупные потери, вызываемые посредством работы обоих преобразователей 10 и 12, становятся меньше, чем потери, вызываемые посредством работы одного из преобразователей 10 и 12.
В первом варианте осуществления требуемая мощность в точке пересечения сплошной линии k5 и пунктирной линии k6 задается в качестве опорного значения Pth. Когда требуемая мощность PR меньше опорного значения Pth, один из преобразователей 10 и 12 останавливается. Когда требуемая мощность PR равна или превышает опорное значение Pth, оба преобразователя 10 и 12 работают. Посредством этого совокупные потери могут подавляться.
Снова ссылаясь на фиг.4, когда требуемая мощность PR меньше опорного значения Pth, блок 106 управления определяет преобразователь 10 или 12, который должен быть остановлен, на основе напряжений VB1 и VB2. Более конкретно, блок 106 управления останавливает преобразователь, соответствующий устройству накопления мощности с более низким напряжением.
Это обусловлено следующей причиной. Как описано выше, когда требуемая мощность PR меньше опорного значения Pth, один из преобразователей 10 и 12 останавливается с тем, чтобы совокупные потери могли быть подавлены. Посредством постоянного поддержания верхнего ответвления преобразователя, который должен работать, во включенном состоянии потери (потери на переключение) могут быть дополнительно подавлены.
Тем не менее, если преобразователь, соответствующий устройству накопления мощности с более высоким напряжением, остановлен, напряжение VH ограничивается до напряжения устройства накопления мощности, соответствующего остановленному преобразователю (поскольку верхнее ответвление оснащено диодом D1). Следовательно, преобразователь, который должен работать, должен обязательно повысить напряжение, предоставляемое из соответствующего устройства накопления мощности, до напряжения VH, и потребуется операция переключения.
В отличие от вышесказанного, посредством остановки преобразователя, соответствующего устройству накопления мощности с более низким напряжением, вышеуказанная операция переключения не требуется, и верхнее ответвление преобразователя, который должен работать, всегда может поддерживаться включенным, и потери могут быть подавлены.
Фиг.8 - это блок-схема, показывающая последовательность операций способа в блоке 106 управления, показанном на фиг.4. Обработка на этой последовательности операций способа вызывается для приведения в исполнение из основной процедуры через предварительно определенные интервалы времени или каждый раз, когда предварительно определенные условия удовлетворяются.
Ссылаясь на фиг.8, блок 106 управления определяет то, является требуемая мощность PR, принимаемая от ECU транспортного средства, меньшей опорного значения Pth или нет (этап S10). Когда блок управления 106 определяет, что требуемая мощность PR меньше опорного значения Pth (ДА на этапе S10), он определяет то, является напряжение VB1 устройства В1 накопления мощности меньшим напряжения VB2 устройства В2 накопления мощности или нет (этап S20).
Когда блок 106 управления определяет, что напряжение VB1 меньше напряжения VB2 (ДА на этапе S20), он останавливает преобразователь 10 и оперирует только с преобразователем 12 (этап S30). Более конкретно, блок 106 управления активирует сигнал CTL1, предоставляемый в блок 108 формирования приводящих сигналов (не показан), соответствующий преобразователю 10, и деактивирует сигнал CTL2, предоставляемый в блок 110 формирования приводящих сигналов (не показан), соответствующий преобразователю 12.
Когда определено на этапе S20, что напряжение равно VB1 или выше напряжения VB2 (НЕТ на этапе S20), блок 106 управления останавливает преобразователь 12 и оперирует только с преобразователем 10 (этап S40). Более конкретно, блок 106 управления активирует сигнал CTL2 и деактивирует сигнал CTL1.
Когда определено на этапе S10, что требуемая мощность PR равна или выше опорного значения Pth (НЕТ на этапе S10), блок 106 управления инструктирует обоим преобразователям 10 и 12 работать (этап S50). Более конкретно, блок 106 управления деактивирует оба сигнала CTL1 и CTL2.
В первом варианте осуществления, как описано выше, когда требуемая мощность PR меньше опорного значения Pth, преобразователь, соответствующий устройству накопления мощности с меньшим напряжением, останавливается. Когда требуемая мощность PR равна или превышает опорное значение Pth, оба преобразователя 10 и 12 работают. Соответственно, первый вариант осуществления может подавлять потери в системе электропитания, сформированной из устройств В1 и В2 накопления мощности, а также преобразователей 10 и 12.
Когда требуемая мощность PR меньше опорного значения Pth, преобразователь, соответствующий устройству накопления мощности с меньшим напряжением, останавливается, с тем чтобы верхнее ответвление преобразователя, который должен работать, всегда могло поддерживаться включенным. В этом случае, следовательно, потери на переключение также могут быть уменьшены в работающем преобразователе, и потери в системе электропитания дополнительно могут быть подавлены.
(Второй вариант осуществления)
Во втором варианте осуществления опорное значение Pth, используемое для определения того, должен один из преобразователей 10 и 12 быть остановлен или нет, является переменным согласно температуре устройств В1 и В2 накопления мощности.
Фиг.9 иллюстрирует взаимосвязь между температурой и внутренним сопротивлением устройства накопления мощности, а фиг.10 иллюстрирует взаимосвязь между требуемой мощностью PR и потерями на сопротивление в устройствах В1 и В2 накопления мощности. Ссылаясь на фиг.9, внутреннее сопротивление устройства накопления мощности возрастает с понижением температуры устройства накопления мощности. Ссылаясь на фиг.10, потери на сопротивление в устройстве накопления мощности возрастают с увеличением требуемой мощности. Поскольку внутреннее сопротивление возрастает с понижением температуры устройства накопления мощности, как описано выше, потери на сопротивление в устройстве накопления мощности дополнительно возрастают с понижением температуры устройства накопления мощности.
На фиг.7, показывающей совокупные потери в системе электропитания, следовательно, опорное значение Pth, которое является значением критерия для определения того, оба преобразователя 10 и 12 должны работать или только один из них должен работать, сдвигается в направлении меньшей требуемой мощности PR по мере того, как температура устройств В1 и В2 накопления мощности понижается. Следовательно, предпочтительно уменьшать опорное значение Pth по мере того, как температура устройств В1 и В2 накопления мощности понижается.
Фиг.11 иллюстрирует взаимосвязь между температурой устройств В1 и В2 накопления мощности и опорным значением Pth. Ссылаясь на фиг.11, опорное значение Pth во втором варианте осуществления задается меньшим по мере того, как температура устройств В1 и В2 накопления мощности понижается.
Температура устройств В1 и В2 накопления мощности может быть получена, к примеру, посредством усреднения температур Т1 и Т2 устройств В1 и В2 накопления мощности. Альтернативно, температура устройства накопления мощности, соответствующего преобразователю, который должен работать без работы другого, т.е. температура устройства накопления мощности с более высоким напряжением, может быть использована в качестве температуры устройств В1 и В2 накопления мощности.
Полная конструкция гибридного транспортного средства, а также конструкции ECU и блока управления преобразователями во втором варианте осуществления такие же, как и в первом варианте осуществления. На практике, как показано на фиг.4, блок 106 управления принимает температуры Т1 и Т2 от датчиков 62 и 64 температуры, соответственно, и изменяет опорное значение Pth на основе температур Т1 и Т2 на этапе S10, показанном на фиг.8.
Во втором варианте осуществления, как описано выше, опорное значение Pth оптимизируется на основе температур Т1 и Т2. Следовательно, второй вариант осуществления позволяет надежно подавлять совокупные потери в системе электропитания.
(Третий вариант осуществления)
В третьем варианте осуществления опорное значение Pth является переменным согласно состоянию заряда (SOC) устройств В1 и В2 накопления мощности, принимающему значение от 0% до 100%.
Фиг.12 иллюстрирует взаимосвязь между SOC и внутренним сопротивлением устройства накопления мощности. Фиг.13 иллюстрирует взаимосвязь между требуемой мощностью PR и потерями на сопротивление в устройствах В1 и В2 накопления мощности. Ссылаясь на фиг.12, внутреннее сопротивление устройства накопления мощности возрастает с понижением SOC устройства накопления мощности. Ссылаясь на фиг.13, потери на сопротивление в устройстве накопления мощности возрастают с увеличением требуемой мощности. Поскольку внутреннее сопротивление возрастает с понижением SOC, как описано выше, потери на сопротивление в устройстве накопления мощности дополнительно возрастают с понижением SOC устройства накопления мощности.
Следовательно, предпочтительно уменьшать опорное значение Pth по мере того, как SOC устройств В1 и В2 накопления мощности понижается, аналогично второму варианту осуществления. Фиг.14 иллюстрирует взаимосвязь между SOC устройств В1 и В2 накопления мощности и опорным значением Pth. Ссылаясь на фиг.14, опорное значение Pth в третьем варианте осуществления задается равным меньшему значению по мере того, как SOC устройств В1 и В2 накопления мощности понижается.
SOC устройств В1 и В2 накопления мощности может быть получено, к примеру, посредством усреднения состояния SOC1 заряда, указывающего SOC устройства В1 накопления мощности, и состояния SOC2 заряда, указывающего SOC устройства В2 накопления мощности. Альтернативно, SOC устройства накопления мощности, соответствующего преобразователю, который должен работать без работы другого, т.е. SOC устройства накопления мощности с более высоким напряжением может быть использовано в качестве SOC устройств В1 и В2 накопления мощности.
Полная конструкция гибридного транспортного средства, а также конструкции ECU и блока управления преобразователями в третьем варианте осуществления такие же, как и в первом варианте осуществления. На практике блок 106 управления принимает состояния SOC1 и SOC2 заряда, как показано на фиг.4, изменяет опорное значение Pth на основе состояний SOC1 и SOC2 заряда на этапе S10, показанном на фиг.8. Состояние SOC1 (или SOC2) заряда может быть вычислено посредством различных известных способов с помощью напряжения VB1 (или VB2), тока I1 (или I2), температуры Т1 (или Т2) и т.п.
В третьем варианте осуществления, как описано выше, опорное значение Pth оптимизируется на основе SOC устройств В1 и В2 накопления мощности. Следовательно, третий вариант осуществления позволяет надежно подавлять совокупные потери в системе электропитания.
(Четвертый вариант осуществления)
В четвертом варианте осуществления опорное значение Pth является переменным согласно частоте переключения преобразователей 10 и 12.
Фиг.15 показывает взаимосвязь между частотой переключения преобразователей 10 и 12 и потерями в преобразователях 10 и 12. Ссылаясь на фиг.15, когда частота переключения возрастает, потери при переключении возрастают, и потери в преобразователе возрастают.
На фиг.7, показывающей совокупные потери в системе электропитания, следовательно, опорное значение Pth, которое является значением критерия для определения того, оба преобразователя 10 и 12 должны работать или только один из них должен работать, сдвигается в направлении меньшей требуемой мощности PR по мере того, как частота переключения преобразователей 10 и 12 возрастает. Следовательно, предпочтительно увеличивать опорное значение Pth по мере того, как частота переключения преобразователей 10 и 12 возрастает.
Фиг.16 иллюстрирует взаимосвязь между частотой переключения преобразователей 10 и 12 и опорным значением Pth. Ссылаясь на фиг.16, опорное значение Pth в четвертом варианте осуществления задается большим по мере того, как частота переключения преобразователей 10 и 12 возрастает.
Полная конструкция гибридного транспортного средства, а также конструкции ECU и блока управления преобразователями в четвертом варианте осуществления такие же, как и в первом варианте осуществления. На практике блок 106 управления изменяет опорное значение Pth на основе несущей частоты преобразователей 10 и 12 на этапе S10, показанном на фиг.8.
Согласно четвертому варианту осуществления, как описано выше, опорное значение Pth оптимизируется на основе частоты переключения преобразователей 10 и 12. Следовательно, четвертый вариант осуществления аналогично позволяет надежно подавлять совокупные потери в системе электропитания.
В каждом из уже описанных вариантов осуществления управление в блоке 106 управления на практике осуществляется посредством CPU (центрального процессора). CPU считывает программу, имеющую соответствующие этапы на блок-схеме последовательности операций способа по фиг.8, из ROM (постоянного запоминающего устройства) и приводит в исполнение считанную программу, чтобы приводить в исполнение обработку согласно блок-схеме последовательности операций способа, показанной на фиг.8. Следовательно, ROM соответствует машиночитаемому (процессорночитаемому) носителю записи, содержащему программу, которая включает в себя соответствующие этапы на блок-схеме последовательности операций способа, показанной на фиг.8.
Варианты осуществления описаны в связи с гибридным транспортным средством так называемого последовательного/параллельного типа, в котором устройство 4 разделения мощности используется для распределения мощности двигателя 2 на электродвигатель-генератор MG1 и колеса 6. Тем не менее, изобретение может быть применено к гибридному транспортному средству так называемого последовательного типа, в котором мощность двигателя 2 используется исключительно для формирования электроэнергии посредством электродвигателя-генератора MG1, и приводная мощность транспортного средства формируется с помощью только электродвигателя-генератора MG2.
Изобретение может быть применено к электрическому транспортному средству, которое не включает в себя двигатель 2 и может приводиться только посредством электроэнергии, а также к так называемому транспортному средству на топливных элементах, включающему в себя топливный элемент в качестве источника питания.
В вышеприведенном описании устройства В1 и В2 накопления мощности соответствуют "первому устройству накопления мощности" и "второму устройству накопления мощности" в изобретении, соответственно, а преобразователи 10 и 12 соответствуют "первому устройству преобразования напряжения" и "второму устройству преобразования напряжения" в изобретении, соответственно. Дополнительно, инверторы 20 и 22 формируют "устройство возбуждения" в изобретении, а электродвигатели-генераторы MG1 и MG2 соответствуют "электрическому двигателю" в изобретении.
Хотя настоящее изобретение подробно описано и иллюстрировано, очевидно, что оно является только способом иллюстрации и примером и не должно восприниматься как ограничение, объем и задача настоящего изобретения интерпретируются только посредством прилагаемой формулы изобретения.













Изобретение относится к управлению подавлением потерь в системе электропитания и может быть использовано на транспортных средствах. Система электропитания содержит первое устройство преобразования напряжения, второе устройство преобразования напряжения, блок управления. Первое устройство преобразования напряжения размещено между первым устройством накопления мощности и нагрузочным устройством для преобразования напряжения. Второе устройство преобразования напряжения размещено между вторым устройством накопления мощности и нагрузочным устройством для преобразования напряжения. Транспортное средство содержит устройства накопления мощности, систему электропитания, устройство возбуждения, электрический двигатель. Способ содержит первый этап, второй этап и третий этап. На первом этапе сравнивают необходимую мощность, требуемую от системы электропитания, с опорным значением. На втором этапе управляют первым и вторым устройствами преобразования напряжения так, что одно из первого и второго устройств преобразования напряжения работает, а другое устройство преобразования напряжения останавливается, когда требуемая мощность меньше опорного значения. На третьем этапе управляют первым и вторым устройствами преобразования напряжения так, что первое и второе устройства преобразования напряжения работают, когда требуемая мощность равна или превышает опорное значение. Технический результат заключается в снижении потерь в системе электропитания. 3 н. и 11 з.п. ф-лы, 16 ил.
1. Система электропитания, оснащенная множеством устройств накопления мощности, содержащая первое устройство преобразования напряжения, размещенное между первым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из упомянутого первого устройства накопления мощности, и предоставления преобразованного напряжения в упомянутое нагрузочное устройство, второе устройство преобразования напряжения, размещенное между вторым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из упомянутого второго устройства накопления мощности, и предоставления преобразованного напряжения в упомянутое нагрузочное устройство, и блок управления, управляющий упомянутыми первым и вторым устройствами преобразования напряжения так, что одно из упомянутых первого и второго устройств преобразования напряжения работает, а другое устройство преобразования напряжения останавливается, когда необходимая мощность, требуемая от системы электропитания, меньше опорного значения, и управляющий упомянутыми первым и вторым устройствами преобразования напряжения так, что упомянутые первое и второе устройства преобразования напряжения работают, когда упомянутая требуемая мощность равна или превышает упомянутое опорное значение.
2. Система электропитания по п.1, в которой, когда упомянутая требуемая мощность меньше упомянутого опорного значения, упомянутый блок управления останавливает устройство преобразования напряжения, соответствующее одному из упомянутых первого и второго устройств накопления мощности, предоставляющему меньшее выходное напряжение, чем другое.
3. Система электропитания по п.1, в которой упомянутое опорное значение определяется на основе потерь на сопротивление в упомянутых первом и втором устройствах накопления мощности и потерь на переключение в упомянутых первом и втором устройствах преобразования напряжения.
4. Система электропитания по п.1, в которой упомянутый блок управления изменяет упомянутое опорное значение таким образом, что упомянутое опорное значение повышается по мере того, как температура упомянутых первого и второго устройств накопления мощности становится выше.
5. Система электропитания по п.1, в которой упомянутый блок управления изменяет упомянутое опорное значение таким образом, что упомянутое опорное значение повышается по мере того, как состояние заряда, представляющее заряженное состояние упомянутых первого и второго устройств накопления мощности, становится выше.
6. Система электропитания по п.1, в которой упомянутый блок управления изменяет упомянутое опорное значение таким образом, что упомянутое опорное значение повышается по мере того, как частота переключения упомянутых первого и второго устройств преобразования напряжения становится выше.
7. Система электропитания по п.1, в которой одно из упомянутых первого и второго устройств накопления мощности включает в себя аккумуляторную батарею, и другое из упомянутых первого и второго устройств накопления мощности включает в себя конденсатор.
8. Транспортное средство, содержащее множество устройств накопления мощности, систему электропитания, устройство возбуждения, снабжаемое электроэнергией из упомянутой системы электропитания, электрический двигатель, приводимый посредством упомянутого устройства возбуждения, и колесо, приводимое посредством упомянутого электродвигателя, при этом упомянутая система электропитания включает в себя первое устройство преобразования напряжения, размещенное между первым устройством накопления мощности и упомянутым устройством возбуждения, для преобразования напряжения, предоставляемого из упомянутого первого устройства накопления мощности, и предоставления преобразованного напряжения в упомянутое устройство возбуждения, второе устройство преобразования напряжения, размещенное между вторым устройством накопления мощности и упомянутым устройством возбуждения, для преобразования напряжения, предоставляемого из упомянутого второго устройства накопления мощности, и предоставления преобразованного напряжения в упомянутое устройство возбуждения, и блок управления, управляющий упомянутыми первым и вторым устройствами преобразования напряжения так, что одно из упомянутых первого и второго устройств преобразования напряжения работает, а другое устройство преобразования напряжения останавливается, когда необходимая мощность, требуемая от упомянутой системы электропитания, меньше опорного значения, и управляющий упомянутыми первым и вторым устройствами преобразования напряжения так, что упомянутые первое и второе устройства преобразования напряжения работают, когда упомянутая требуемая мощность равна или превышает упомянутое опорное значение.
9. Способ управления системой электропитания, оснащенной множеством устройств накопления мощности, при этом упомянутая система электропитания включает в себя первое устройство преобразования напряжения, размещенное между первым устройством накопления мощности и нагрузочным устройством для преобразования напряжения, предоставляемого из упомянутого первого устройства накопления мощности, и предоставления преобразованного напряжения в упомянутое нагрузочное устройство, и второе устройство преобразования напряжения, размещенное между вторым устройством накопления мощности и упомянутым нагрузочным устройством для преобразования напряжения, предоставляемого из упомянутого второго устройства накопления мощности, и предоставления преобразованного напряжения в упомянутое нагрузочное устройство, и упомянутый способ управления содержит первый этап, на котором сравнивают необходимую мощность, требуемую от упомянутой системы электропитания, с опорным значением, второй этап, на котором управляют упомянутыми первым и вторым устройствами преобразования напряжения так, что одно из упомянутых первого и второго устройств преобразования напряжения работает, а другое устройство преобразования напряжения останавливается, когда упомянутая требуемая мощность меньше опорного значения, и третий этап, на котором управляют упомянутыми первым и вторым устройствами преобразования напряжения так, что упомянутые первое и второе устройства преобразования напряжения работают, когда упомянутая требуемая мощность равна или превышает упомянутое опорное значение.
10. Способ управления системой электропитания по п.9, в котором упомянутый второй этап включает в себя первый подэтап, на котором сравнивают выходное напряжение упомянутого первого устройства накопления мощности с выходным напряжением упомянутого второго устройства накопления мощности, второй подэтап, на котором останавливают упомянутое первое устройство преобразования напряжения, когда выходное напряжение упомянутого первого устройства накопления мощности ниже выходного напряжения упомянутого второго устройства накопления мощности, и третий подэтап, на котором останавливают упомянутое второе устройство преобразования напряжения, когда выходное напряжение упомянутого второго устройства накопления мощности ниже выходного напряжения упомянутого первого устройства накопления мощности.
11. Способ управления системой электропитания по п.9, в котором упомянутое опорное значение определяется на основе потерь на сопротивление в упомянутых первом и втором устройствах накопления мощности и потерь на переключение в упомянутых первом и втором устройствах преобразования напряжения.
12. Способ управления системой электропитания по п.9, в котором упомянутое опорное значение устанавливается таким образом, чтобы повышаться по мере того, как температура упомянутых первого и второго устройств накопления мощности становится выше.
13. Способ управления системой электропитания по п.9, в котором упомянутое опорное значение устанавливается таким образом, чтобы повышаться по мере того, как состояние заряда, указывающее заряженное состояние упомянутых первого и второго устройств накопления мощности, становится выше.
14. Способ управления системой электропитания по п.9, в котором упомянутое опорное значение устанавливается таким образом, чтобы повышаться по мере того, как частота переключения упомянутых первого и второго устройств преобразования напряжения становится выше.
| US 2004150365 A1, 05.08.2004 | |||
| JP 2003032901 A, 31.01.2003 | |||
| JP 7274378 A, 20.10.1995 | |||
| СПОСОБ РАБОТЫ КОМБИНИРОВАННОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1998 |
|
RU2223183C2 |

