Данное изобретение касается устройства и способа образования работы и рабочих характеристик простых и эффективных комбинированных электрических транспортных средств.
Комбинированные электрические транспортные средства повсеместно рассматриваются как имеющие наибольшее практическое применение из числа транспортных средств с низким загрязнением. Комбинированное электрическое транспортное средство включает в себя электрическую "тяговую" аккумуляторную батарею, которая обеспечивает электроэнергию для электрического тягового двигателя, который, в свою очередь, приводит в действие колеса транспортного средства. Аспект "комбинированный" комбинированного электрического транспортного средства заключается в использовании вторичного, или дополнительного источника электрической энергии для подзарядки тяговой аккумуляторной батареи во время работы транспортного средства. Этот вторичный источник электроэнергии может быть панелями солнечных элементов, топливным элементом, генератором, приводимым в действие двигателем внутреннего сгорания, или, в общем, любым другим источником электрической энергии. Когда в качестве вторичного источника электроэнергии используется двигатель внутреннего сгорания, обычно он представляет собой сравнительно небольшой двигатель, который использует небольшое количество топлива и производит небольшое загрязнение. Сопутствующее преимущество заключается в том, что такой маленький двигатель внутреннего сгорания может работать в ограниченном диапазоне числа оборотов в минуту, так что можно оптимизировать меры борьбы с загрязнением двигателя. Термины "первичный" и "вторичный", используемые для описания источников электрической энергии, просто относятся к способу распределения энергии во время работы и не имеют существенного значения для изобретения. Простое транспортное средство с электроприводом, запитываемое только от электрических аккумуляторных батарей, имеет недостатки, заключающиеся в том, что аккумуляторные батареи могут истощаться в то время, когда транспортное средство находится далеко от станции зарядки аккумуляторных батарей и даже когда такое транспортное средство успешно возвращается в свой гараж после использования его в течение дня, аккумуляторные батареи затем следует подзарядить. Комбинированное электрическое транспортное средство имеет значительное преимущество по сравнению с простым электрически запитываемым транспортным средством, состоящее в том, что комбинированное электрическое транспортное средство подзаряжает собственные аккумуляторные батареи во время работы, и, таким образом, обычно не нуждается ни в какой внешней зарядке аккумуляторной батареи. Таким образом, комбинированное электрическое транспортное средство можно использовать аналогично обычному транспортному средству, снабжаемому энергией от двигателей внутреннего сгорания, требующего только пополнения топлива. Другое главное преимущество комбинированного электрического транспортного средства заключается в хорошей характеристике пробега в милях на галлон израсходованного топлива (в километрах на литр израсходованного топлива). Преимущество в характеристике пробега в километрах на литр израсходованного топлива является результатом использования рекуперативного динамического торможения, которое преобразовывает кинетическую энергию движения в электроэнергию в течение по меньшей мере части торможения, и возвращает энергию в аккумуляторную батарею. Нашли, что потери на торможение объясняют где-то около половины всех фрикционных потерь, испытываемых транспортным средством при регулировании проезда в городских условиях. Регенерация этих 50% энергии и возвращение их в аккумуляторные батареи для дальнейшего использования позволяет использовать намного меньше "вторичный" работающий от топлива электрический генератор, чем в случае, если бы не использовалось рекуперативное торможение. В свою очередь, меньший вторичный источник электроэнергии приводит к меньшему количеству топлива, используемого за единицу времени, или за километр. Еще одно преимущество комбинированного электрического транспортного средства состоит в том, что при многих условиях, мощность, которая доступна для ускорения транспортного средства, является суммой максимальной мощности, которую могут обеспечить аккумуляторные батареи, плюс максимальная мощность, которую может генерировать вторичный электрический генератор. Когда электрический генератор представляет собой дизельный двигатель внутреннего сгорания, сочетание мощности аккумуляторной батареи и мощности дизеля может приводить к общей движущей силе, которая является весьма существенной, несмотря на хорошие характеристики пробега в километрах на литр израсходованного топлива.
Хотя комбинированные электрические транспортные средства выгодны с экономической и экологической точки зрения, чтобы достичь широкого распространения, они должны быть относительно "несложны", то есть они должны быть аналогичны обычным транспортным средствам с двигателями внутреннего сгорания в их работе и в их реакциях на входной сигнал оператора.
В соответствии с аспектом изобретения, способ функционирования комбинированного электрического транспортного средства, которое получает по меньшей мере часть силы тяги от электрических аккумуляторных батарей, включает в себя этап, при рабочих режимах транспортного средства, отличающихся от режима торможения, обеспечения энергии на тяговый двигатель от вспомогательного источника, а также обеспечения, от аккумуляторных батарей, разницы между требуемой тяговой мощностью и обеспечиваемой от вспомогательного источника, до максимальной возможности аккумуляторных батарей, когда аккумуляторные батареи находятся в состоянии зарядки, находящемся между состоянием первой зарядки и полной зарядки. Первое состояние зарядки, конечно, меньше, чем состояние полной зарядки. В соответствующем этому аспекту изобретения способе, при рабочих режимах транспортного средства, отличающихся от режима торможения, тяговый двигатель обеспечивается энергией только от вспомогательного источника, когда аккумуляторные батареи находятся во втором состоянии зарядки, представляющем по существу разряженное состояние аккумуляторных батарей. При рабочих режимах транспортного средства, отличающихся от режима торможения, энергия на тяговый двигатель обеспечивается от вспомогательного источника, а также он обеспечивается энергией от аккумуляторных батарей по величине, меньшей, чем полная возможность аккумуляторных батарей, когда аккумуляторные батареи находятся в состоянии зарядки, находящемся между разряженным состоянием и первым состоянием зарядки.
В варианте этого аспекта изобретения, способ функционирования комбинированного электрического транспортного средства, которое получает по меньшей мере часть силы тяги от электрических аккумуляторных батарей, включает в себя этап, при рабочих режимах транспортного средства, отличающихся от режима торможения, обеспечения энергии на тяговый двигатель от вспомогательного источника электроэнергии, а также обеспечения на тяговый двигатель, от аккумуляторных батарей, и до максимальной возможности аккумуляторных батарей, разницы между требуемой тяговой мощностью и обеспечиваемой от вспомогательного источника, когда аккумуляторные батареи находятся в состоянии зарядки, находящейся между полной зарядкой и первым состоянием зарядки, меньшим, чем полная зарядка. Другие, соответствующие этому варианту аспекта изобретения этапы включают в себя: (а) при рабочих режимах транспортного средства, отличающихся от режима торможения, обеспечение энергии на тяговый двигатель только от вспомогательного источника, когда аккумуляторные батареи находятся во втором состоянии зарядки, где второе состояние зарядки представляет по существу разряженное состояние аккумуляторных батарей, и (b) при рабочих режимах транспортного средства, отличающихся от режима торможения, обеспечение энергии на тяговый двигатель от вспомогательного источника, а также обеспечение энергии на тяговый двигатель от аккумуляторных батарей по величине, которая приблизительно находится в таком же отношении к полной возможности аккумуляторных батарей, как величина заряда в аккумуляторных батареях относится к полному заряду.
Фиг. 1 представляет упрощенную блок-схему соответствующего аспекту изобретения электрического транспортного средства, включающего в себя командный контроллер, который в соответствии с изобретением осуществляет управление, а также включающего в себя контроллер мощности.
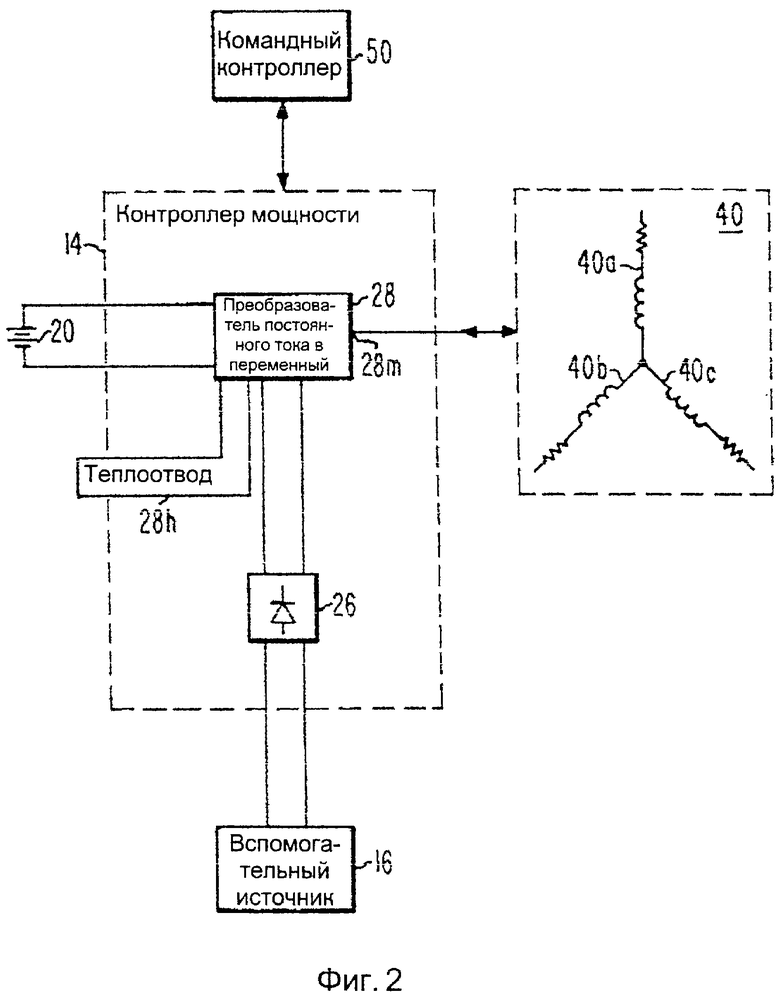
Фиг. 2 представляет упрощенную блок-схему, иллюстрирующую некоторые из функций, осуществляемых в показанном на фиг.1 контроллере мощности.
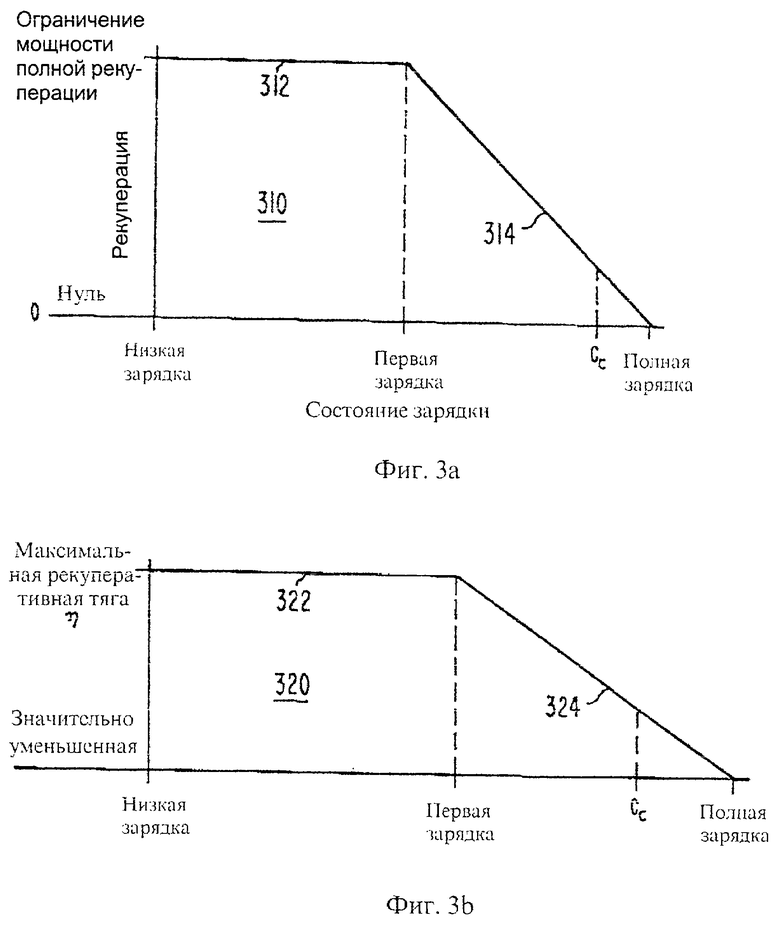
Фиг. 3а и 3b представляют упрощенные графики рекуперации энергии в тяговую аккумуляторную батарею в зависимости от состояния зарядки тяговой аккумуляторной батареи и тяги из-за рекуперации в зависимости от состояния зарядки тяговой аккумуляторной батареи соответственно.
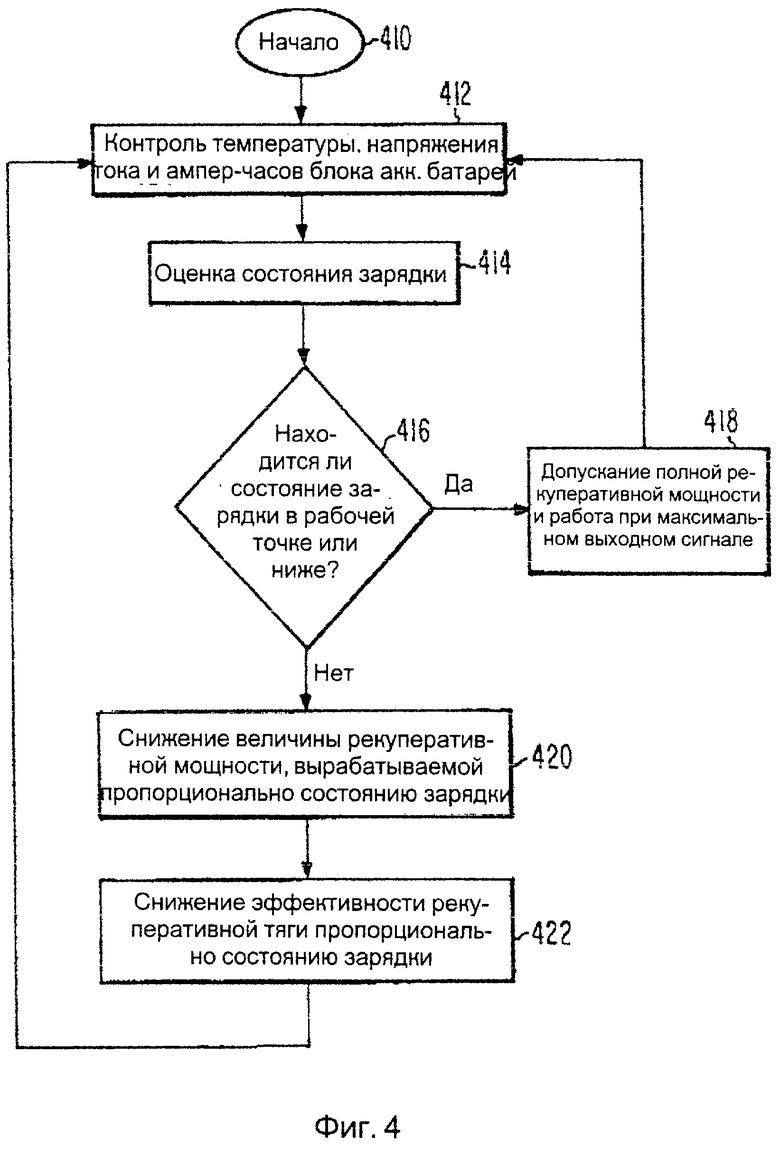
Фиг. 4 представляет упрощенную графическую схему программы, иллюстрирующую логический поток в контроллере команд фиг.1 и 2, для обеспечения операций, иллюстрируемых на фиг.3а и 3b.
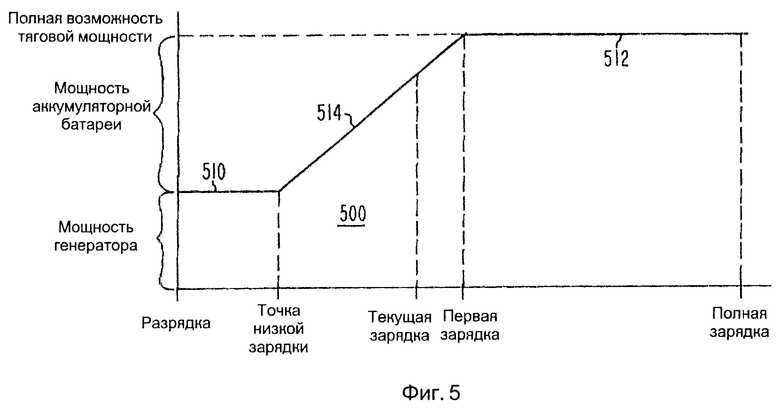
Фиг. 5 иллюстрирует упрощенный график распределения подачи тягового усилия на тяговой двигатель транспортного средства фиг.1 в функции зарядки тяговой аккумуляторной батареи.
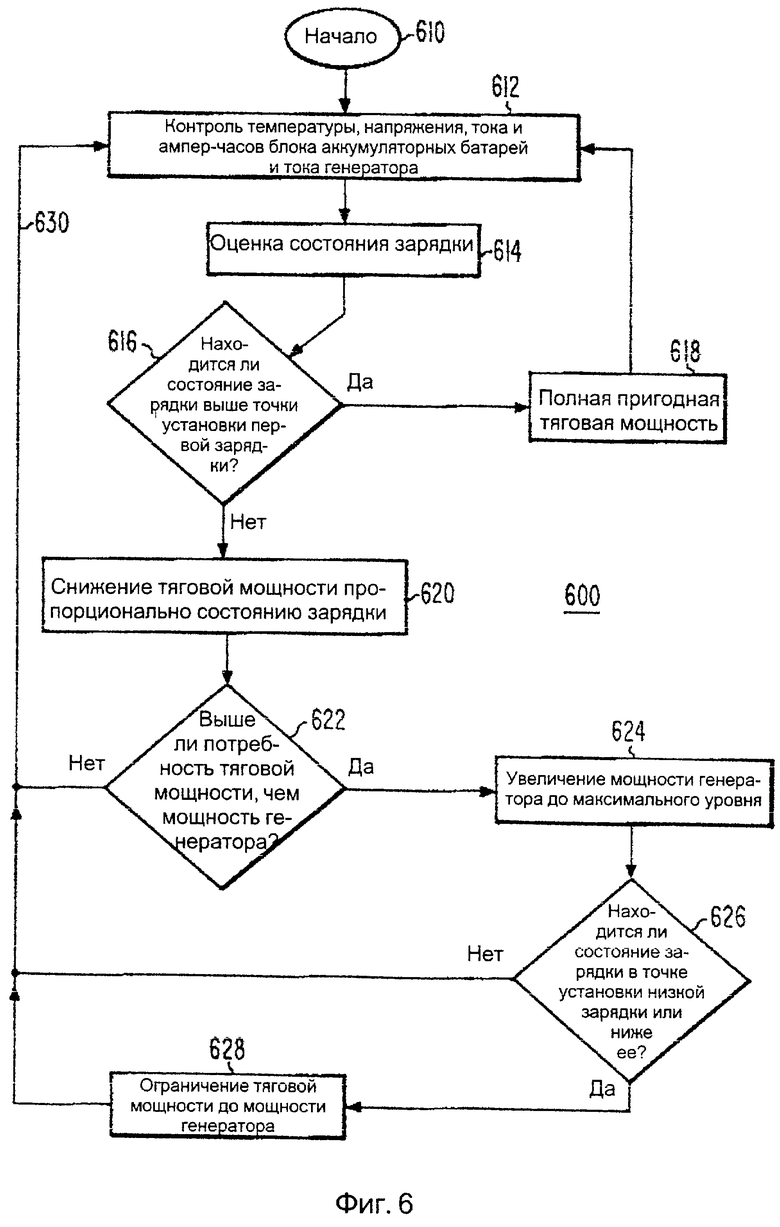
Фиг. 6 представляет упрощенную графическую схему программы, иллюстрирующую логический поток в командном контроллере фиг.1 и 2 для обеспечения операций, иллюстрируемых на фиг.5.
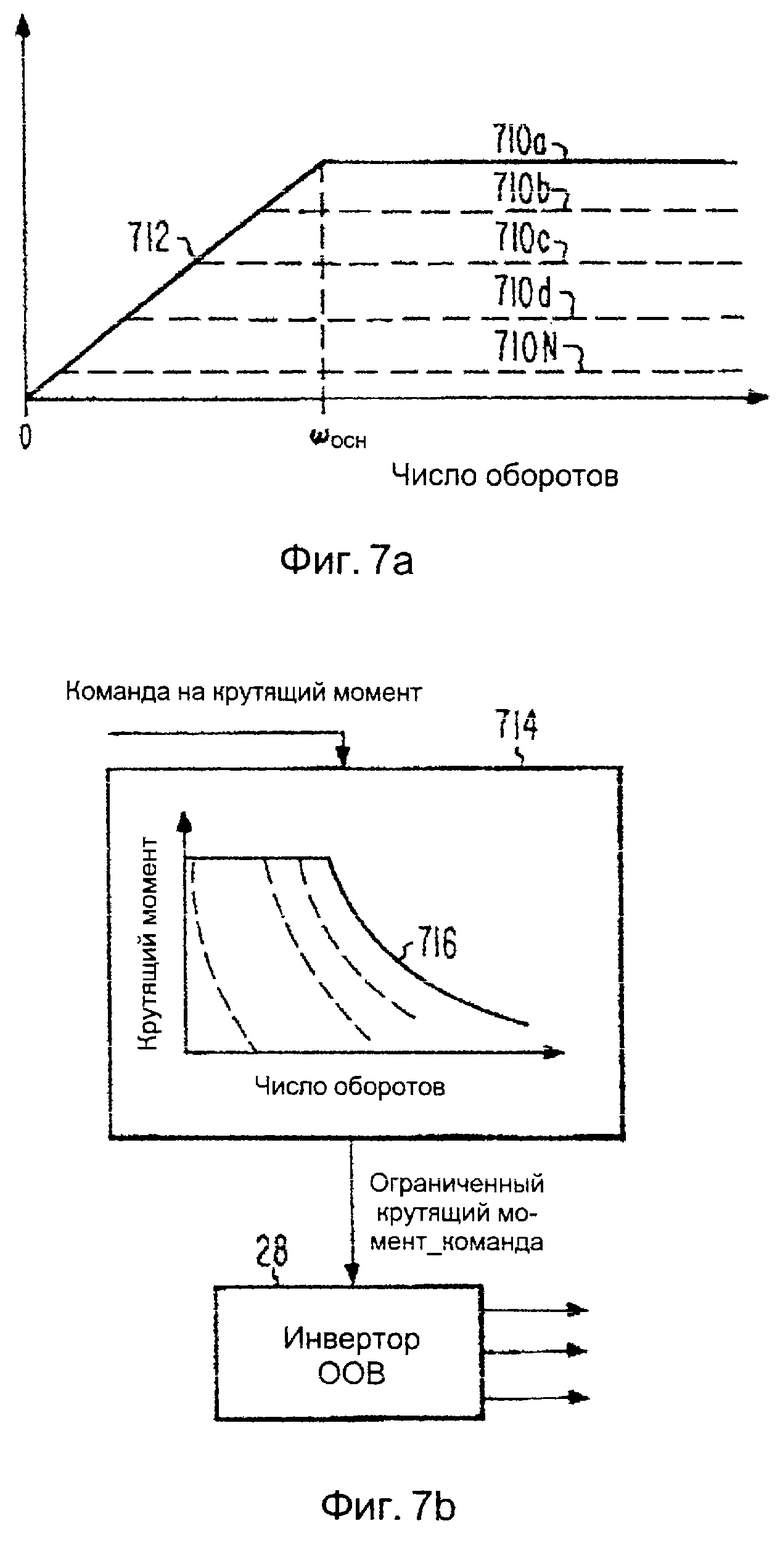
Фиг.7а представляет график мощности двигателя или генератора в зависимости от числа оборотов с крутящим моментом в качестве параметра, а фиг.7b является представлением способа управления мощностью двигателя/генератора.
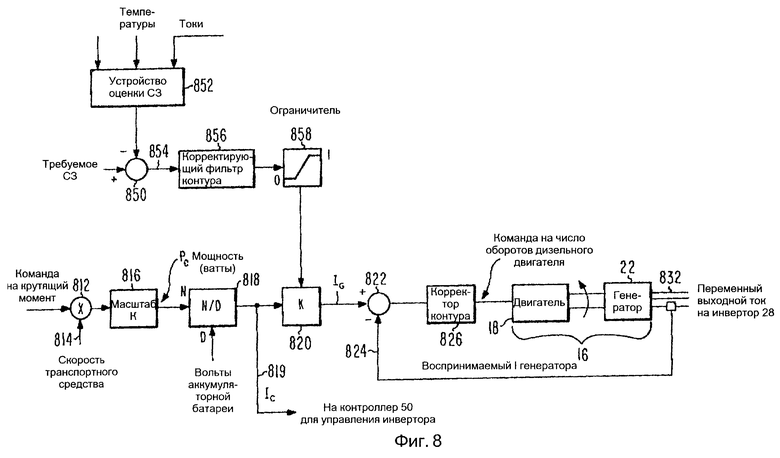
Фиг.8 представляет упрощенную блок-схему, иллюстрирующую некоторые схемы или устройства управления для управления количеством электроэнергии, генерируемой вспомогательным источником энергии под действием состояния зарядки тяговой аккумуляторной батареи.
Как показано на фиг.1, электрическое транспортное средство 10 включает в себя по меньшей мере одно ведущее колесо 12, подсоединенное к тяговому электродвигателю 40 переменного напряжения, который в одном варианте осуществления изобретения является трехфазным двигателем переменного тока. Двигатель 40 предпочтительно представляет собой известный двигатель/генератор, так что кинетическая энергия движения может преобразовываться в электрическую энергию во время динамического торможения. Контроллер 14 мощности подсоединен каналами манипулирования мощностью к тяговому двигателю 40, к тяговой аккумуляторной батарее, показанной ссылочной позицией 20, и к вспомогательному источнику электрической энергии, показанному в виде блока 16. Как показано в блоке 16, вспомогательный источник может включать в себя двигатель внутреннего сгорания типа дизельного двигателя 18, приводящий электрический генератор 22, или он может включать в себя топливный элемент 24. Командный контроллер, показанный в виде блока 50, соединен посредством информационных каналов с контроллером 14 мощности, вспомогательным источником 16, и с тяговым двигателем 40, для управления работой контроллера 14 мощности, вспомогательного источника 16 и тягового двигателя 40 согласно соответствующим законам управления.
Одним из наиболее простых и наименее дорогостоящих типов батарей, которые способны хранить относительно высокую энергию, является обычная свинцовая/Н2SO4 аккумуляторная батарея. Этот тип аккумуляторной батареи является подходящим для использования в электрическом транспортном средстве, если приняты какие-либо меры для предотвращения применения его зарядного тока, когда аккумуляторная батарея полностью заряжена, предотвращения выделения газа электролита и нежелательного тепловыделения, и если можно избежать сульфатирования.
На фиг. 1 средства отображения и органы управления оператора транспортного средства 10 показаны в виде блока 30. Блок 30 показан подсоединенным двунаправленным информационным каналом 31 к блоку 50 командного управления, для применения команд приведения в действие к командному контроллеру 50, и этот командный контроллер 50 может затем преобразовывать в соответствующие команды для различных элементов мощности типа контроллера 14 мощности, вспомогательного источника 16 и тягового двигателя 40. Блок 30 также показан подсоединенным каналом 32 к фрикционным тормозам 36а и 36b для прямого управления фрикционными тормозами с помощью обычной гидравлической тормозной системы, соединенной с тормозной педалью.
Фиг. 2 представляет взаимное соединение некоторых из элементов контроллера 14 мощности фиг.1 с другими элементами фиг.1. В частности, контроллер 14 мощности включает в себя устройство 26 выпрямителя, подсоединенное к вспомогательному источнику 16, для преобразования (если необходимо) выходного сигнала переменного тока вспомогательного источника 16 в постоянное напряжение. Контроллер 14 мощности также включает в себя двунаправленную систему управления силовой установки, которая дополнительно включает в себя инвертор 28 для преобразования постоянного тока в переменный, подсоединенный с помощью энергетических связей к аккумуляторной батарее 20, к устройству 26 выпрямителя и к тяговому двигателю 40. Действиями инвертора 28, вспомогательного источника 16 и тягового двигателя 40 управляет, как упомянуто выше, командный контроллер 50. Следует отметить, что в дополнение к инвертору 28 постоянного тока в переменный, система управления силовой установки включает в себя датчики напряжения и тока, для считывания различных рабочих параметров двигателя/генератора, аккумуляторной батареи и вспомогательного источника электроэнергии.
При основной работе устройства фиг.1 и 2 командный контроллер (50) управляет индивидуальными переключателями (не показанными) инвертора 28 с помощью модулированных по длительности импульса команд, которые приводят к генерированию, на том порте 28m инвертора 28, который подсоединен к тяговому двигателю 40, аппроксимации переменного напряжения, имеющего выбранные частоту и амплитуду. В предпочтительном варианте осуществления изобретения, инвертор представляет собой тип оператора с ориентированным возбуждением (OOВ), а тяговый двигатель является, аналогично этому, асинхронным двигателем ООВ. Частоту и амплитуду управляемого привода переменного тока для тягового двигателя 40 выбирают так, чтобы приводить в действие двигатель выбранным тяговым током с выбранным числом оборотов вала двигателя. В общем, тяговый двигатель 40 вырабатывает обратную электродвижущую силу, которая увеличивается с увеличением числа оборотов двигателя, и инвертор должен вырабатывать (под управлением командного контроллера 50) переменное напряжение, которое возрастает по амплитуде с увеличением частоты переменного напряжения, чтобы поддерживать тот же самый ток привода тягового двигателя. Вал двигателя вращается с частотой, соответствующей управляемой частоте выходного сигнала инвертора. Кроме того, при основной работе электрического транспортного средства, типа показанного на фиг.1 и 2, можно выполнять как динамическое торможение, так и фрикционное торможение. Динамическое торможение гораздо предпочтительнее, поскольку (кинетическая) энергия, свойственная движению транспортного средства, вновь захватывается тяговым двигателем, работающим как электрический генератор, когда движение транспортного средства замедляется. В течение тех интервалов времени, в которые происходит динамическое торможение, инвертор 28 постоянного тока в переменный фиг.2, работающий во втором, или рекуперирующем направлении, преобразует переменное напряжение, производимое тяговым двигателем 40, в постоянное напряжение, которое заряжает тяговую аккумуляторную батарею 20. Кроме того, когда электрическое транспортное средство является комбинированным электрическим транспортным средством, включающим в себя вспомогательный источник 16 электроэнергии, вспомогательный источник может работать во время работы транспортного средства, чтобы пополнять аккумуляторные батареи, и/или для обеспечения некоторой части тягового усилия, в зависимости от команд командного контроллера 50.
Следует отметить, что когда электрическое транспортное средство работает в нормальном режиме, используя динамическое торможение, а батареи полностью заряжены, динамическое торможение стремится проводить зарядный ток через уже заряженную аккумуляторную батарею. Характеристики свинцовой аккумуляторной батареи таковы, что в этой ситуации подведения зарядного тока к полностью заряженной аккумуляторной батарее напряжение аккумуляторной батареи имеет тенденцию к заметному повышению, как от полностью заряженного значения при отсутствии тока 13 Вольт, в аккумуляторной батарее с номинальным значением 12 Вольт, до значения, близкого к 16 Вольтам, вследствие чего обеспечивая индикацию для контроллера команд, что возникло условие избыточной зарядки. Если контроллер команд развязывает энергию, генерируемую динамическим торможением, от аккумуляторной батареи, как необходимо для защиты аккумуляторной батареи, напряжение аккумуляторной батареи сразу же падает до ее полностью заряженного значения при отсутствии тока. Это, в свою очередь, обеспечивает возможность контроллеру динамического торможения снова начать обеспечивать энергию для аккумуляторной батареи, пока не произойдет управление перенапряжением. Это приводит к периодическому применению динамического торможения с частотой импульсов, устанавливаемой в соответствии с характеристиками контура контроллера команд, и производит ощутимые вибрации торможения, а также стремится к избыточной зарядке аккумуляторной батареи во время участков межимпульсного интервала. Как избыточная зарядка, так и вибрация нежелательны.
Фиг. 3а и 3b вместе иллюстрируют соответствующий аспекту изобретения закон управления, который обеспечивает полную рекуперацию или возвращение в тяговые аккумуляторные батареи энергии, получаемой от динамического торможения во время тех интервалов, в которых тяговые аккумуляторные батареи находятся в состоянии зарядки, меньше, чем конкретная величина зарядки, и эта конкретная величина зарядки меньше, чем полная зарядка, и которая, на уровнях зарядки тяговых аккумуляторных батарей, находящихся между конкретной зарядкой и полной зарядкой, уменьшает пропорцию рекуперируемой энергии, получаемой от динамического торможения способом, который является чувствительным или зависимым от существующего в данный момент состояния зарядки относительно разности зарядки между заранее определенной зарядкой и полной зарядкой. В одном варианте осуществления изобретения, соотношение является монотонным, и соотношение может быть линейным. На фиг.3а, график 310 представляет, в соответствии с аспектом изобретения, величину рекуперации в функции состояния зарядки тяговой аккумуляторной батареи в соответствии с законом управления. Более конкретно, график 310 определяет участок 312, который является постоянным по величине рекуперации динамического торможения, представляющий 100% рекуперацию, или настолько близкую к 100%, насколько это возможно. При полной зарядке величина рекуперации энергии, получаемой от динамического торможения, уменьшается до почти нулевой величины, или настолько близкой к нулю, насколько это удобно. Представленный графиком 310 закон управления далее включает в себя второй участок 314, который монотонно снижается от 100% рекуперации на заранее определенном уровне зарядки тяговых аккумуляторных батарей, называемом "первой зарядкой", до нулевой рекуперации при полной зарядке тяговой аккумуляторной батареи. Действие рекуперативной тяги или торможения транспортного средства в функции состояния зарядки тяговой аккумуляторной батареи показано графиком 320 на фиг.3b. На фиг.3b, график 320 содержит первый участок 322, который проходит на постоянной величине, представляющей максимальную рекуперативную тягу, от уровней низкой зарядки до "первого" уровня зарядки тяговой аккумуляторной батареи. Второй участок 324 графика 320 представляет рекуперативную тягу, которая монотонно понижается от 100% на уровне "первой" зарядки до 0% при полной зарядке. Хотя участки 314 и 324 графиков 310 и 320 соответственно показаны в виде линейных снижений, для целей управления достаточно, чтобы участки 314 и 324 были монотонными. Это монотонное снижение динамического торможения не должно быть заметно для водителя автомобиля, поскольку состояние зарядки тяговой аккумуляторной батареи изменяется медленно, и, следовательно, медленно изменяется величина рекуперативного торможения. Поскольку рекуперативное торможение изменяется медленно, фрикционные тормоза постепенно воспринимают какой-либо дефицит между динамическим торможением и требуемым тормозным усилием. Это, в свою очередь, снижает вибрацию, которая является заметной, когда закон управления просто защищает тяговую аккумуляторную батарею от избыточной зарядки простым прекращением рекуперации, когда аккумуляторные батареи находятся в состоянии полной зарядки.
Фиг. 4 представляет упрощенную графическую схему программы, иллюстрирующую ту часть 400 законов управления, управляющих процессором 50 управления фиг. 1, который приводит к типу осуществления, представленному на фиг.3а и 3b. На фиг.4, логическая схема начинается в блоке 410 "начало" и переходит к блоку 412, который представляет контроль параметров блока тяговой аккумуляторной батареи (20 фиг.1), таких как температура, напряжение и ток, а также отметку времени. Выборки этих параметров можно осуществлять на часто повторяющихся интервалах выборки, например при каждом повторении логики по циклу фиг. 4. От логического блока 412 логика переходит к блоку 414, который представляет оценку состояния зарядки тяговой аккумуляторной батареи, определяя величину заряда, который поступил на аккумуляторную батарею, и вычитая величину заряда, который вышел из аккумуляторной батареи. Мерой этой зарядки является ампер-час. Как только выполнится оценка состояния зарядки тяговой аккумуляторной батареи, логика переходит к блоку 416 принятия решения, который сравнивает ток или оцененное в данное время состояние зарядки тяговой аккумуляторной батареи с заранее определенной величиной зарядки, представленной уровнем "первая зарядка" фиг.3а и 3b; как упомянуто выше, этот уровень зарядки меньше полной зарядки. Если блок 416 принятия решения обнаруживает, что полученный в результате оценки уровень зарядки тяговой аккумуляторной батареи ниже уровня первой зарядки, логика выходит из блока 416 принятия решения через выход ДА и переходит к следующему блоку 418, который представляет возможность использования полной рекуперативной энергии или мощности торможения. Предпринятым в блоке 418 действием может быть, например, регулирование тока возбуждения в тяговом двигателе (работающем в режиме генератора) во время торможения, чтобы довести до максимума электрический выходной сигнал тягового двигателя. Следует отметить, что некоторые типы двигателей/генераторов не имеют отдельной обмотки возбуждения, а скорее имеют множества обмоток, в которых одна обмотка имеет требуемый ток, наведенный или индуцированный управляемым током в другой обмотке; для целей изобретения, способ, которым генерируется ток возбуждения, не относится к делу, достаточно того, что он генерируется с требуемой величиной. Из блока 418, логика возвращается назад в блок 412, чтобы начать другое повторение цикла. Когда комбинированное электрическое транспортное средство приводится в это состояние, тяговая аккумуляторная батарея часто становится более полно заряженной благодаря непрерывному вводу энергии (посредством действия вспомогательного двигателя внутреннего сгорания/генератора) в систему накопителя энергии, которая включает в себя тяговую аккумуляторную батарею и движение транспортного средства.
В конечном счете, состояние зарядки тяговой аккумуляторной батареи превышает уровень "первой зарядки", показанный на фиг.3а и 3b. В это время изменяются повторения логики контроллера 50 фиг.1 по части его предварительно запрограммированной логики, представленной логическим циклом 400 фиг. 4, поскольку логический поток больше не будет направляться от выхода ДА блока 416 принятия решения, а вместо этого направится к выходу НЕТ. С выхода НЕТ блока 416 принятия решения логика переходит к следующему блоку 420, который представляет снижение величины рекуперативной мощности или энергии, имеющейся в форме кинетической энергии транспортного средства, в обратной зависимости или обратно пропорционально количеству имеющегося времени зарядки относительно разности между полной зарядкой и уровнем первой зарядки фиг. 3а и 3b. Таким образом, если текущее состояние зарядки находится на 70% пути между первой зарядкой и полной зарядкой, как показано позицией СC на фиг. 3а и 3b, величина энергии движения, которая допускается для восстановления и подачи на аккумуляторную батарею, составляет 30%. Когда текущий уровень зарядки достигает 100%, допустимая рекуперация составляет 0%. Как упомянуто выше, управление подачей энергии или мощности от тягового двигателя, действующего как генератор, может быть выполнено просто путем регулирования управляющего крутящего момента привода в электродвигателе переменного тока с управляемым ориентированным возбуждением. В фактическом варианте осуществления изобретения, крутящий момент уменьшается пропорционально числу оборотов для управления количеством энергии, производимой двигателем, действующим как генератор, которая возвращается в тяговую аккумуляторную батарею.
Как было описано до сих пор, логика фиг.4 управляет рекуперацией в соответствии с состоянием зарядки тяговой аккумуляторной батареи. Это означает, что тормозящая сила, действующая на транспортном средстве с помощью тягового двигателя, действующего как генератор, снижается во время торможения. Одно из преимуществ электрического транспортного средства, в котором используется рекуперативное торможение, заключается в том, что фрикционные тормоза не нужны для того, чтобы выполнять все торможение, и поэтому их устройство и конструкция могут быть такими, чтобы получить преимущество от меньшего использования, например, путем изготовления более легкой их конструкции. Как было описано до сих пор со ссылкой на логику фиг.4, динамическое торможение снижается при некоторых условиях зарядки тяговой аккумуляторной батареи. Для обеспечения дополнительного торможения во время тех периодов времени, когда рекуперативное торможение снижается, согласно другому аспекту изобретения, логика переходит от блока 420 фиг.4 к следующему блоку 422, который представляет снижение эффективности тягового двигателя, действующего как генератор. Это снижение эффективности тягового двигателя, действующего как генератор, можно выполнять регулированием либо проскальзывания, либо тока в обмотке возбуждения, или предпочтительно и того, и другого вместе. Из блока 422 фиг.4 логика возвращается к блоку 412, чтобы начать другое повторение "по циклу" или по логической схеме 400.
Как было описано до сих пор, вибрация или неровное выполнение происходили из-за защиты полностью заряженной аккумуляторной батареи от дополнительной зарядки. Подобный эффект возникает при ускорении в случае почти разряженной батареи. Во время ускорения транспортного средства 10 фиг.1 и тяговая аккумуляторная батарея 20, и вспомогательный, или вторичный источник 16 электроэнергии (двигатель внутреннего сгорания/генератор) доступны в качестве источников электрической энергии для тягового двигателя 40. Следовательно, тяговый двигатель 40 может обеспечивать мощность со скоростью, которая является суммой максимальной мощности, которую можно получить от тяговой аккумуляторной батареи 20, вместе с максимальной мощностью, которую может обеспечивать вспомогательный источник 16. Это удобно для работы в городе, где внезапные появления ускорения могут требовать значительной мощности. Однако при некоторых условиях органы управления защитой тяговой аккумуляторной батареи, если они просто останавливают получение мощности от тяговой аккумуляторной батареи, когда аккумуляторная батарея достигает состояния зарядки, которое считают разряженным состоянием, также приводит к некоторой форме вибрации. Эта форма вибрации встречается, если транспортное средство преодолевает подъем в течение длительного промежутка времени, такого как при пересечении континентального раздела. Если скорость использования энергии при преодолении подъема транспортного средства на дороге превышает скорость отдачи энергии вспомогательным источником 16, аккумуляторные батареи непрерывно разряжаются и в конечном счете достигнут уровня зарядки, которое считают "разряженным" уровнем. Если бы в это время контроллер тяговой аккумуляторной батареи просто отключил тяговую аккумуляторную батарею от цепи тягового двигателя, то величина тока, доступная для тягового двигателя, внезапно уменьшилась бы до уровня, обеспечиваемого вспомогательным источником 16, с последующим резким изменением тягового усилия, и транспортное средство испытало бы внезапное снижение скорости. Однако устранение разрядки тяговой аккумуляторной батареи на тяговой двигатель позволяет резко повысить напряжение аккумуляторной батареи до уровня напряжения без нагрузки. Если контроллер интерпретирует это повышение напряжения как индикацию, что тяговая аккумуляторная батарея имеет пригодную для применения зарядку, он может вновь подсоединить тяговую аккумуляторную батарею к тяговому двигателю, благодаря чему снова обеспечивая дополнительное тяговое усилие от тяговой аккумуляторной батареи, но вызывая падение напряжения тяговой аккумуляторной батареи. Специалисты в данной области техники распознают это как колебательное состояние, которое может вызывать повторяющееся "пыхтение" или покачивание транспортного средства во время преодоления подъема.
Здесь следует отметить, что "полностью" разряженная батарея, в контексте тяговой аккумуляторной батареи, в которой желателен продолжительный срок службы, все еще содержит существенный заряд, поскольку срок службы таких батарей резко снижается, если глубина разрядки слишком большая; таким образом, разряженная аккумуляторная батарея для целей обсуждения работы транспортных средств с электроприводом является такой, в которой аккумуляторные батареи находятся в состоянии зарядки, считающемся полностью разряженным состоянием, но которая все еще содержит существенный заряд. В комбинированном электрическом транспортном средстве вспомогательный источник энергии непрерывно обеспечивает энергию, которая может использоваться для зарядки тяговых аккумуляторных батарей, если потребности тяги меньше, чем выход вспомогательного источника энергии. Законы управления допускают, чтобы и вспомогательный источник энергии, и тяговые аккумуляторные батареи обеспечивали энергию для тягового двигателя. Когда потребность тягового двигателя превышает выходную мощность вспомогательного источника, ток течет от тяговой аккумуляторной батареи, что приводит к падению напряжения. Если тяговая аккумуляторная батарея близка к состоянию полной разрядки, падение напряжения, вызванное этим отведением тока, может быть таким, что вызовет защиту аккумуляторной батареи путем прекращения отвода тока от аккумуляторной батареи. Прекращение отвода тока в соответствии с законами управления, в свою очередь, вызывает подачу энергии на транспортное средство исключительно от вспомогательного источника и обеспечивает возможность повышения напряжения тяговой аккумуляторной батареи. Когда напряжение тяговой аккумуляторной батареи повышается, законы управления больше не распознают аккумуляторную батарею как разряженную, и от тяговой аккумуляторной батареи снова допускается отвод тока. Процесс неоднократного подсоединения и отсоединения тяговой аккумуляторной батареи к тяговому двигателю составляет колебание системы управления. Это колебание приводит к тому, что сила тяги изменяется со скоростью колебания системы управления, и это может быть заметно оператору транспортного средства.
В соответствии с другим аспектом изобретения, контроллер 50 управляет величиной мощности, которую можно получать от тяговой аккумуляторной батареи под действием состояния зарядки тяговой аккумуляторной батареи. Это исключает описанную выше ситуацию "пыхтения" и обеспечивает плавное снижение скорости, с которой транспортное средство может преодолевать подъем в гору, когда уменьшается зарядка аккумуляторной батареи. Фиг.5 иллюстрирует график 500, который представляет результат управления в соответствии с этим аспектом изобретения. На фиг. 5 доступное для транспортного средства тяговое усилие представлено графиком зависимости от состояния или уровня зарядки тяговой аккумуляторной батареи. График 500 включает в себя участок 510, который представляет непрерывный выходной сигнал вспомогательного источника электрической энергии или мощности, который представляет собой относительно низкий уровень. Участок 510 графика проходит от уровня ниже, чем номинальное состояние разрядки, до уровня зарядки, обозначенного "точкой низкой зарядки", который является номинальным разряженным состоянием тяговой аккумуляторной батареи. В рабочей области, представленной участком 512 графика, доступное для транспортного средства тяговое усилие находится на относительно высоком уровне, представляющем суммарную мощность аккумуляторной батареи и вспомогательного источника. Этот уровень максимальной мощности, представленный участком 512 графика, проходит от состояния зарядки, называемого "первая зарядка", до полностью заряженного состояния. Между состоянием "низкой зарядки" тяговой аккумуляторной батареи и состоянием "первой зарядки" величина тягового усилия зависит от состояния зарядки тяговой аккумуляторной батареи, как представлено участком 514 графика. Действие этого типа управления состоит в том, чтобы обеспечивать работу с полным тяговым усилием во время периода времени, пока тяговая аккумуляторная батарея не получит частичной разрядки до "первого" уровня. Когда напряжение тяговой аккумуляторной батареи снизится немного ниже первого уровня, величина мощности аккумуляторной батареи, которая доступна для тягового двигателя, слегка уменьшится, на величину, которая считается незаметной. Это небольшое снижение мощности в точке чуть ниже первого уровня зарядки фиг.5 несколько снижает скорость разрядки тяговой аккумуляторной батареи. Если холм длинный, тяговая аккумуляторная батарея может разряжаться дальше. Когда тяговая аккумуляторная батарея становится дополнительно разряженной в области между состоянием "низкой" и "первой" зарядки фиг.5, относительно меньшая часть мощности аккумуляторной батареи становится доступной для тягового двигателя, приводя к дальнейшему замедлению движения транспортного средства. В случае самых длинных холмов тяговая аккумуляторная батарея в конечном счете достигнет состояния "низкой" зарядки, которое считается номинально разряженным. При достижении этого уровня из тяговой аккумуляторной батареи энергия больше не извлекается, и, в общем, состояние зарядки тяговой аккумуляторной батареи не может проходить ниже уровня "низкой" зарядки на участке 510 графика, если нет какого-либо другого отвода на тяговой аккумуляторной батарее типа аварийной блокировки защиты аккумуляторной батареи в условиях неизбежной опасности для транспортного средства или пассажиров. При управлении в соответствии с графиком фиг. 5, ни в одной точке на кривой управления не имеется никакого резкого перехода в тяговом усилии. Когда зарядка аккумуляторной батареи находится чуть выше точки "низкой" зарядки, и образуется переход к работе полностью от вспомогательного источника электроэнергии, величина тягового усилия, обеспечиваемого тяговой аккумуляторной батареей, уже очень маленькая, и переход для водителя транспортного средства будет незаметен.
Фиг. 6 представляет упрощенную графическую схему программы, которая иллюстрирует ту часть 600 логической схемы контроллера 50 фиг.1, которая обеспечивает управление в соответствии с графиком 500 фиг.5. На фиг.6 логическая схема начинается с блока 610 "начало" и переходит к блоку 612, который представляет считывание характеристик аккумуляторной батареи, почти также, как в блоке 412 фиг.4. Из блока 612 фиг.6 логика переходит к блоку 614, который представляет оценку состояния зарядки, также как описано в общем в соответствии с фиг.4. Блок 616 принятия решения фиг.6 определяет, находится ли текущее состояние зарядки выше точки "первой" зарядки фиг.5, и направляет логику посредством выхода ДА блока 616 принятия решения, если состояние зарядки выше точки "первой" зарядки. С выхода ДА блока 616 принятия решения логика переходит к блоку 618, который представляет образование полного тягового усилия, доступного для тягового двигателя. Это осуществляется путем перемещения ограничений мощности, как описано в связи с фиг.7а и 7b, в программном обеспечении, управляющем инвертором, отмечая, что источником является только вспомогательный источник, в то время как аккумуляторная батарея и двигатель/генератор могут быть источниками или потребителями энергии, в зависимости от действия инвертора. От блока 618 логика переходит назад к блоку 612, чтобы начать другое повторение по логическому циклу фиг.6. В общем, при начале с почти полностью заряженной тяговой аккумуляторной батареей, логика будет повторяться по циклу, включающему блоки 612, 614, 616 и 618 фиг.6 до тех пор, пока зарядка тяговой аккумуляторной батареи не превысит зарядку, представленную уровнем "первой" зарядки на фиг.5.
На длинном подъеме зарядка тяговой аккумуляторной батареи может в конечном счете снизиться до точки, равной или меньше "первой" зарядки фиг.5, и при следующем повторении логического цикла фиг.6, логика 6 выходит из блока 616 принятия решения через выход НЕТ и переходит к блоку 620. Блок 620 представляет снижение доступной для тягового двигателя величины мощности от тяговой аккумуляторной батареи на величину, которая зависит от величины текущей зарядки тяговой аккумуляторной батареи относительно разности между состояниями "первой" и "низкой" зарядки фиг.5. Например, если уровень зарядки тяговой аккумуляторной батареи в данный момент падает ниже состояния "первой" зарядки фиг.5 до уровня, представленного на фиг.5 как "текущая зарядка", который составляет 9/10 величины между уровнями зарядки, представленными уровнями "низкой" и "первой" зарядки, контроллер 50 управляет величиной, доступной для тягового двигателя мощности, от тяговой аккумуляторной батареи так, чтобы обеспечить 90% поставляемой аккумуляторной батареей составляющей от всей мощности, представленной участком 512 графика. Другими словами, поскольку текущее состояние зарядки, показанное на фиг.5 "текущей зарядкой", представляет 90% той составляющей всего тягового усилия, которая обозначена относящейся к аккумуляторной батарее, мощность аккумуляторной батареи, обеспечиваемая для тягового двигателя, уменьшается до 90% мощности аккумуляторной батареи. Конечно, не требуется, чтобы участок 514 графика фиг. 5 имел линейный наклон, как показано, но система управления упрощается, если участок 514 графика по меньшей мере монотонный. От блока 620 фиг.6, логический цикл переходит к блоку 622 принятия решения, который сравнивает расход потребляемой мощности тягового двигателя с мощностью от вспомогательного источника электрической энергии. Если потребность в тяговой мощности превышает мощность от вспомогательного источника электричества, аккумуляторные батареи являются разряженными, и логика выходит из блока 622 принятия решения через выход ДА. От выхода ДА блока 622 принятия решения логический цикл переходит к блоку 624, который представляет увеличение доступной от вспомогательного источника мощности до ее максимальной величины. От блока 624 логика переходит к блоку 626 принятия решения. Блок 626 принятия решения сравнивает текущее состояние зарядки тяговой аккумуляторной батареи с точкой "низкой" зарядки фиг.5. Если состояние зарядки находится ниже точки "низкой" зарядки, показывая, что тяговая аккумуляторная батарея не должна далее разряжаться для предотвращения повреждения тяговой аккумуляторной батареи, логика выходит из блока 626 принятия решения через выход ДА и переходит к логическому блоку 628. Блок 628 представляет ограничение мощности тягового двигателя, посредством управления ООВ, до известной величины мощности, доступной от вспомогательного источника электрической энергии, легко определяемой в виде произведения напряжения, умноженного на ток. От блока 628 логический цикл переходит по логическому каналу 630 назад к блоку 612, чтобы начать другое повторение логического цикла фиг.6. Если при исследовании состояния зарядки тяговой аккумуляторной батареи блоком 626 принятия решения текущее состояние зарядки оказывается больше точки "низкой" зарядки фиг.5, логика выходит из блока 626 принятия решения через выход НЕТ и переходит по логическому каналу 630 назад к блоку 612, без прохождения блока 628. Таким образом, когда в тяговой аккумуляторной батарее имеется значительный применимый заряд, логика фиг.6 разрешает его использование. Если во время прохождения логики по циклу фиг.6 блок 622 принятия решения находит, что тяговое усилие не больше, чем производимая вспомогательным источником 16 мощность, логика выходит из блока 622 принятия решения через выход НЕТ и проходит по логическому каналу 630 к блоку 612, чтобы начать другое повторение; этот канал обходит увеличение мощности вспомогательного источника 16 до максимума.
Фиг.7а показывает упрощенный параметрический график 710а, 710b, 710с,... , 710N мощности двигателя (или генератора) в зависимости от числа оборотов. На фиг. 7а графики 710а, 710b, 710с,..., 710N имеют общий наклонный участок 712. Мощность для двигателя или генератора представляет произведение крутящего момента, умноженного на число оборотов. Следовательно, при нулевом числе оборотов мощность равна нулю, независимо от крутящего момента. Когда число оборотов увеличивается при постоянном крутящем моменте, увеличивается мощность, как показано участком 712 графиков фиг.7а, до числа оборотов ωосн. Когда частоты выше ωосн, конструкция двигателя/генератора такова, что больше не может манипулировать мощностью, по тепловым или другим причинам. Следовательно, при максимальном крутящем моменте мощность двигателя/генератора ограничена в соответствии с законами управления инвертора до положения на графике 710а. Если крутящий момент немного меньше максимального крутящего момента, максимальная мощность достигается при несколько меньшем числе оборотов двигателя, чем ωосн, представленном графиком 710b. График 710с представляет еще более низкую величину крутящего момента, а еще более низкий график 710N представляет самый низкий крутящий момент, который может поддерживать квантованная система управления. Система управления ограничивает создаваемый двигателем крутящий момент предельной величиной, зависящей от числа оборотов, с целью предотвращения работы двигателя с мощностью, превышающей требуемые максимальные пределы мощности. Предельный крутящий момент_ ограничение определяется просто путем деления максимальной мощности на текущее число оборотов двигателя
крутящий момент_ограничение=Рmах/число оборотов
и полученное ограничение для крутящего момента вызывает ограничение графика мощности значением, не превышающим представленное на фиг.7а графиком 710а и участком 712 графика значением. Если мощность должна быть ограничена величиной меньше чем Рmах, график мощности, которому следует двигатель, соответствует одному из графиков 710b, 710с, . . ., 710N фиг.7а. Фиг.7b представляет упрощенную блок-схему, поясняющую связь команды на крутящий момент и ограничителя мощности. На фиг.7b крутящий момент_команда подается в блок 714 ограничителя, который регулирует величину команды на крутящий момент (ограниченный крутящий момент_команда), которая прибывает на инвертор 28 управления с ориентированным возбуждением (OOВ) способом, который ограничивает мощность так, чтобы она находилась ниже кривой 716. Кривая 716 представляет собой график крутящего момента в зависимости от числа оборотов, определяемого путем деления выбранной или установленной мощности Р на число оборотов двигателя. Таким образом, инвертор OOВ может управлять мощностью двигателя посредством управления управляемого крутящего момента, учитывая число оборотов двигателя. Обсуждаемый крутящий момент может быть тяговым крутящим моментом или крутящим моментом на ведущем валу, или он может быть замедляющим или тормозным моментом. Когда желательно управление мощностью, поступающей в аккумуляторные батареи от двигателя, действующего как генератор, соответствующие команды OOВ приводят к применению ограничения.
На фиг.8, требуемый крутящий момент или команду на крутящий момент получают от электрического акселератора (не показанного) и подают с помощью канала 810 на первый входной порт умножителя 812, который принимает измеряемую скорость транспортного средства (или число оборотов тягового двигателя, если транспортное средство оборудовано коробкой передач) с датчиков (не показанных) на втором входном порте 814. Умножитель 812 производит перемножение числа оборотов вала двигателя и управляемого крутящего момента с целью создания сигнала, представляющего управляемую мощность, подлежащую подаче на тяговой двигатель. Блок 816 масштабирует, если необходимо, управляемую мощность с помощью постоянной k для преобразования сигнала в представление Рc управляемой мощности тягового двигателя в ваттах. Сигнал Рc, представляющий управляемую мощность в ваттах, подается из блока 816 в следующий блок 818, который представляет деление управляемой мощности в ваттах на напряжение тяговой аккумуляторной батареи для получения сигнала, представляющего управляемый ток тягового двигателя (Ic=Р/Е). Напряжение тяговой аккумуляторной батареи является приемлемым индикатором напряжения тягового двигателя, потому что все напряжения в системе имеют тенденцию к напряжению аккумуляторной батареи. Сигнал, представляющий управляемый ток Iс, передается по сигнальному каналу 819 в участок командного контроллера 50 фиг.1 для управления инвертором 28 00В и тяговым двигателем 40 таким способом, который вырабатывает требуемый ток двигателя. Сигнал, представляющий управляемый ток Iс, также передается с выхода блока 818 посредством масштабирующей схемы, показанной в виде блока 820, на генератор 822 сигнала рассогласования. Назначение масштабирующей схемы 820 объясняется ниже, но ее действие приводит к преобразованию управляемого тока Iс двигателя в управляемый ток IG генератора. Генератор 822 сигнала рассогласования генерирует сигнал рассогласования посредством вычитания сигнала обратной связи из сигнального канала 824, представляющий воспринимаемый выходной ток двигателя внутреннего сгорания/генератора (генератора), из управляемого тока IG генератора. Сигнал рассогласования, вырабатываемый генератором 822 сигнала рассогласования, подается на корректирующий фильтр контура, который может быть простым интегратором, для образования сигнала, представляющего управляемое число оборотов вспомогательного источника 16 электрической энергии, конкретнее, дизельного двигателя 18. Дизельный двигатель 18 приводит электрический генератор 22 для вырабатывания переменного выходного напряжения для подачи посредством энергетических проводников 832 на инвертор 28 фиг.1. Устройство датчика тока, показанное в виде кружочка 834, подсоединено к выходным проводникам 832 для считывания тока генератора. Блоки 822, 826, 18, 22 и 824 фиг. 8 вместе составляют замкнутый контур обратной связи, который стремится делать выходной ток генератора 22 равным величине, управляемой управляющим сигналом Ic, подаваемым на генератор ошибок. Корректирующее устройство 826 контура выбирают для предотвращения слишком быстрого изменения числа оборотов дизельного двигателя, которое может нежелательно приводить к увеличению загрязнений.
Как было описано до сих пор, показанное на фиг.8 устройство вырабатывает сигнал Ic для управления током тягового двигателя и управления движением транспортного средства, а также вырабатывает сигнал IG, который управляет током вспомогательного генератора 22. На фиг.8 сигнал, представляющий требуемое состояние зарядки (СЗ) тяговой аккумуляторной батареи, принимается на неинвертирующем входном порте суммирующей схемы 850. Сигнал, представляющий текущее состояние зарядки, принимается на инвертирующем входном порте суммирующей схемы 850 с блока 852 определения состояния зарядки (СЗ) аккумуляторной батареи. Блок 852 СЗ принимает сигналы, представляющие напряжение аккумуляторной батареи, температуру аккумуляторной батареи и токи аккумуляторной батареи. В общем, состояние зарядки аккумуляторной батареи представляет собой просто интеграл по времени результирующих значений входного и выходного токов. Блок 852 СЗ интегрирует результирующие амперы тока, чтобы вырабатывать ампер-часы зарядки. Суммирующая схема 850 создает, в сигнальном канале 854, сигнал рассогласования, который представляет разность между требуемым или управляемым состоянием зарядки тяговой аккумуляторной батареи и ее фактическим состоянием зарядки, для идентификации тем самым мгновенного избытка или недостатка зарядки. Сигнал рассогласования подается на корректирующий фильтр 856 контура, который интегрирует сигнал рассогласования, вырабатывая проинтегрированный сигнал рассогласования. Проинтегрированный сигнал рассогласования медленно изменяется в функции времени. Проинтегрированный сигнал рассогласования действует на блок 820 через ограничитель 858. Более конкретно, проинтегрированный сигнал рассогласования, когда подается в блок 820 масштабирования, выбирает коэффициент масштабирования, которым масштабируется управляемый ток Ic двигателя, чтобы преобразовать его в управляемый ток генератора. Ограничитель 858 просто ограничивает проинтегрированный сигнал рассогласования из блока 856 так, что диапазон коэффициентов масштабирования блока 820 масштабирования ограничивается диапазоном между нулем и 1 (единицей). Таким образом, управляемый ток IG генератора никогда не может быть больше, чем управляемый ток Ic тягового двигателя, а может быть меньше, в соответствии с коэффициентом масштабирования, управляемым ограниченным проинтегрированным сигналом из ограничителя 858, и управляемый ток IG генератора может быть уменьшен до нулевого тока.
Требуемое состояние зарядки тяговой аккумуляторной батареи представляет уровень зарядки, который меньше, чем полная зарядка, так что рекуперативное торможение можно применять без опасности повреждения тяговой аккумуляторной батареи из-за избыточного заряда. Таким образом, точка установки требуемого СЗ представляет собой зарядку, которая меньше полной зарядки. Действие устройства фиг. 8 можно понять, полагая, что нормальное состояние выходного сигнала интегратора в корректирующем фильтре 856 контура составляет 0,5 Вольта, то есть половину между максимумом 1,0 Вольт и минимумом 0,0 Вольт, допускаемым ограничителем 858. Величина проинтегрированного сигнала рассогласования (ограничиваемого ограничителем 858) может рассматриваться как множительный коэффициент, на который масштабирующая схема 820 умножает управляемый ток тягового двигателя, так что проинтегрированный сигнал рассогласования, имеющий величину 1,0, вызывает передачу управляемого тока Iс тягового двигателя с полной величиной генератором 822 сигнала рассогласования, в то время как величина 0,5 дает величину управляемого тока IG генератора, равную точно половине величины управляемого тока Iс тягового двигателя. При работе транспортного средства под управлением устройства фиг.8, когда состояние зарядки тяговой аккумуляторной батареи превышает требуемую величину, генератор 850 сигнала рассогласования вычитает большую величину сигнала, представляющую высокое состояние зарядки, из величины точки установки, вследствие чего производя сигнал разности или рассогласования, имеющий отрицательную полярность. Интегратор в корректирующем фильтре 856 контура интегрирует сигнал с отрицательной полярностью, который имеет тенденцию "уменьшать" или понижать отрицательное результирующее значение проинтегрированного сигнала на выходе корректирующего фильтра 856 контура от его "нормальной" величины 0,5 Вольта, возможно, например, вниз до 0,3 Вольта. Поскольку величина 0,3 Вольта проинтегрированного сигнала рассогласования лежит в пределах допустимого диапазона ограничителя 858, проинтегрированный сигнал рассогласования просто проходит через ограничитель 858 для управления масштабирующей схемой 820 таким образом, чтобы заставить управляемый ток Iс тягового двигателя умножаться на 0,3, а не на "нормальный" коэффициент 0,5, производя управляемый ток IG генератора. Таким образом, состояние зарядки аккумуляторной батареи, больше требуемой точки установки, приводит к снижению среднего выходного сигнала генератора. Таким же образом, если состояние зарядки тяговой аккумуляторной батареи ниже требуемой точки установки, сигнал, поступающий из блока 852 фиг. 8 на инвертирующий входной порт генератора 850 сигнала рассогласования становится меньше по величине, чем сигнал, представляющий требуемую СЗ, что приводит к положительной величине сигнала рассогласования на выходе генератора 850 сигнала рассогласования. Интегратор, связанный с фильтром 856 контура, интегрирует свой положительный входной сигнал, и вырабатывает проинтегрированный выходной сигнал, который имеет тенденцию увеличиваться выше его "нормальной" величины 0,5 Вольта до величины, например, 0,8 Вольта. Поскольку эта величина находится в пределах значений, допустимых для ограничителя 858, проинтегрированный сигнал рассогласования 0,8 Вольта подается в масштабирующую схему 820 без изменения. Проинтегрированное напряжение рассогласования 0,8 Вольта заставляет масштабирующую схему 820 умножать сигнал, представляющий управляемый ток Iс тягового двигателя, на 0,8, так что управляемый ток IG генератора становится больше, чем прежде. Результирующее влияние уменьшения зарядки тяговой аккумуляторной батареи до величины ниже установленной точки состоит в увеличении средней выходной мощности генератора 22, который имеет тенденцию увеличения уровня зарядки тяговой аккумуляторной батареи. Специалисты в данной области техники поймут, что упоминаемая выше "нормальная" величина проинтегрированного сигнала рассогласования фактически не существует, и используется только для того, чтобы помочь понять работу системы управления.
В соответствии с аспектом изобретения, способ (фиг.5 и 6) функционирования комбинированного электрического транспортного средства (10), которое получает по меньшей мере часть силы тяги от электрических аккумуляторных батарей (20), включает в себя этап, при рабочих режимах (ускорения или движения при постоянной скорости) транспортного средства, отличающихся от режима торможения, обеспечения энергии на тяговый двигатель (40) от вспомогательного источника (16), а также обеспечения, от аккумуляторных батарей (20), разницы между требуемой тяговой мощностью и обеспечиваемой от вспомогательного источника (16), до максимальной возможности аккумуляторных батарей (20), когда аккумуляторные батареи (20) находятся в состоянии зарядки, находящемся между первым состоянием зарядки (первая зарядка на фиг.5) и полной зарядкой. Первое состояние зарядки, конечно, меньше, чем состояние полной зарядки. В соответствующем этому аспекту изобретения способе, при рабочих режимах (ускорения или движения при постоянной скорости) транспортного средства (10), отличающихся от режима торможения, тяговый двигатель (40) обеспечивается энергией (510) только от вспомогательного источника (16), когда аккумуляторные батареи находятся во втором состоянии зарядки (не превышающем "точку низкой зарядки" на фиг.5), представляющем по существу разряженное состояние аккумуляторных батарей (20). При рабочих режимах транспортного средства, отличающихся от режима торможения, энергия на тяговый двигатель (40) обеспечивается от вспомогательного источника (16), а также тяговый двигатель (40) обеспечивается энергией от аккумуляторных батарей (20) по величине, меньшей, чем полная возможность аккумуляторных батарей, когда аккумуляторные батареи находятся в состоянии зарядки ("текущая зарядка" на фиг.5), находящемся между разряженным состоянием ("точка низкой зарядки") и первым состоянием зарядки.
В варианте этого аспекта изобретения, способ (514, 618) функционирования комбинированного электрического транспортного средства (10), которое получает по меньшей мере часть силы тяги от электрических аккумуляторных батарей (20), включает в себя этап (618), при рабочих режимах (ускорения или движения при постоянной скорости) транспортного средства (10), отличающихся от режима торможения, обеспечения энергии на тяговый двигатель (40) от вспомогательного источника (16) электроэнергии, а также обеспечения на тяговый двигатель (40), от аккумуляторных батарей (20), и до максимальной возможности аккумуляторных батарей (20), разницы ("полная возможность тяговой мощности" минус "мощность генератора") между требуемой тяговой мощностью и обеспечиваемой от вспомогательного источника (16), когда аккумуляторные батареи (20) находятся в состоянии зарядки, находящейся между состоянием полной зарядки и первым состоянием зарядки, меньшим чем упомянутое состояние полной зарядки. Другие соответствующие этому варианту аспекта изобретения этапы (628) включают в себя (а) при рабочих режимах (ускорения или движения при постоянной скорости) транспортного средства (10), отличающихся от режима торможения, обеспечение энергии на тяговый двигатель (40) только от вспомогательного источника (16), когда аккумуляторные батареи находятся во втором состоянии зарядки (не превышающем "точку низкой зарядки" на фиг.5), где второе состояние зарядки представляет по существу разряженное состояние аккумуляторных батарей (20) и (b) при рабочих режимах транспортного средства, отличающихся от режима торможения, обеспечение энергии на тяговый двигатель (40) от вспомогательного источника, а также обеспечение энергии на тяговый двигатель (40) от аккумуляторных батарей (20) по величине, которая приблизительно находится в таком же отношении к полной возможности аккумуляторных батарей, как величина заряда в аккумуляторных батареях относится к полному заряду.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫСОКОТЕМПЕРАТУРНЫХ БАТАРЕЙ ДЛЯ ГИБРИДНЫХ ЛОКОМОТИВА И ВНЕДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2388624C2 |
| ГИБРИДНЫЙ ЛОКОМОТИВ С НЕСКОЛЬКИМИ ДВИГАТЕЛЯМИ | 2006 |
|
RU2411143C2 |
| СИСТЕМА ОДНОВРЕМЕННОЙ ЗАРЯДКИ И ОБЕСПЕЧЕНИЯ ВЫХОДНОГО ПИТАНИЯ АККУМУЛЯТОРНОЙ БАТАРЕИ С ОГРАНИЧЕНИЕМ ТОКА | 2010 |
|
RU2543504C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ УПРАВЛЕНИЯ ВЫХОДНЫМ НАПРЯЖЕНИЕМ ГЕНЕРАТОРА ПЕРЕМЕННОГО ТОКА ИЛИ ВСТРОЕННОГО СТАРТЕРА-ГЕНЕРАТОРА | 2012 |
|
RU2611728C2 |
| Водородная энергетическая установка для транспортных средств | 2023 |
|
RU2828205C1 |
| СИСТЕМА ЗАРЯДКИ АККУМУЛЯТОРНЫХ БАТАРЕЙ ДЛЯ ГИБРИДНОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2551690C2 |
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| СИСТЕМА ЗАРЯДКИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЗАРЯДКИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561162C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2432550C2 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2448329C1 |
Изобретение относится к области электропитания транспортных средств с электроприводом. Зарядку аккумуляторных батарей (АБ) вспомогательным источником электроэнергии и от динамического торможения снижают по величине, когда АБ находятся в состоянии между частичной и полной зарядкой, при величине зарядки, связанной с относительным состоянием зарядки АБ. Дефицит между потребностью тягового двигателя и электроэнергией, доступной от вспомогательного источника, обеспечивают от АБ в количестве, зависящем от состояния АБ. Полную величину дефицита обеспечивают, когда АБ близки к полной зарядке. Небольшое количество энергии обеспечивают или совсем не обеспечивают, когда АБ близки к разряженному состоянию. При состояниях между полной зарядкой и почти полной разрядкой АБ обеспечивают такое количество энергии, которое монотонно зависит от состояния зарядки. Зарядку АБ от вспомогательного источника уменьшают во время динамического торможения, когда АБ близки к полной зарядке. Управление количеством энергии, возвращаемой во время динамического торможения, может осуществляться путем управления преобразованием эффективности тягового двигателя, работающего как генератор. Изобретение обеспечивает управление электрическим транспортным средством с возможностью согласования его работы с работой обычного транспортного средства с двигателем внутреннего сгорания. 2 c.п. ф-лы, 10 ил.
| US 5291960 А, 08.03.1994 | |||
| Электромагнитный сепаратор | 1976 |
|
SU611675A1 |
| Устройство для продольной модификации зубьев зубчатых колес методом пластической деформации | 1979 |
|
SU782941A1 |
| ЭЛЕКТРОМОБИЛЬ | 1992 |
|
RU2048309C1 |

