Предлагаемые технические решения относятся к области радиолокации и могут быть использованы в обзорных радиолокационных станциях (РЛС) с игольчатым лучом.
Известен способ радиолокационного обзора зоны пространства, заключающийся в ее зондировании сигналами РЛС с широким лучом, охватывающим весь сектор в угломестной плоскости, и приеме сигналов таким же широким лучом (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, М.: Сов. радио, 1970, с.242, п.2; рис.5.21,б). Недостаток этого способа состоит в низкой точности измерения угловых координат и в низкой разрешающей способности по угловым координатам, а следовательно, и в низкой точности определения местоположения цели, что определяется увеличенными размерами луча.
Известен способ радиолокационного обзора зоны пространства, заключающийся в зондировании угловых направлений сигналами РЛС при пошаговом перемещении игольчатого луча антенны в пространстве (там же, стр.242, п.3, рис.5.21,в). Преимущество этого способа состоит в высокой точности измерения угловых координат, в высокой разрешающей способности по угловым координатам, что вместе с высокой точностью измерения дальности обеспечивает высокую точность определения местоположения цели.
Количество разрешаемых угловых направлений, которые осматривает при этом обзорная РЛС, определяется в виде:

где ΔВ, ΔЕ - размеры осматриваемой области пространства по азимуту и углу места соответственно;
Δβ, Δε - размер луча по азимуту и по углу места соответственно на уровне пересечения диаграмм направленности антенны при положении луча в соседних угловых направлениях, как правило, равном 0,7.
Если период обзора осматриваемой области пространства равен Т, а частота излучения зондирующих сигналов F, то среднее количество зондирующих сигналов, приходящихся на одно угловое направление, равно:

Для современной обзорной РЛС S-диапазона входящие в (2) параметры могут иметь следующие значения: F=400 Гц, Т≤10 с, ΔВ=360°, ΔЕ=60-80°, Δβ, Δε≤2°, при этом из (2) следует nз≤0.75, т.е. число зондирующих сигналов меньше, чем число угловых направлений, которые следует осматривать. Положение еще более ухудшается, когда появляются обнаруженные цели, поскольку для сопровождения каждой необходимо затрачивать каждый период обзора число зондирующих сигналов существенно больше 1 и дефицит времени, отводимого на обзор зоны пространства, еще более увеличивается (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М.: Радио и связь, 1986, с.208, нижний абз. - с 209, 2-й абз.), а также в условиях действия пассивных помех, когда на осмотр углового направления требуется число зондирующих сигналов также существенно больше 1. В этих случаях круговой обзор пространства становится невозможным.
Таким образом, для современных обзорных РЛС S-диапазона с игольчатым лучом существует проблема недостатка времени на обзор зоны пространства, когда РЛС не может зондировать каждый период обзора, каждое угловое направление хотя бы одним зондирующим сигналом (проблема «импульсного голода»). В этом состоит главный недостаток рассматриваемого способа обзора пространства.
Известен способ обзора пространства в условиях дефицита зондирующих сигналов, основанный на установке различных приоритетов в обслуживании различных зон (там же). В частности, иногда высший приоритет присваивают зоне, для которой требуются минимальные относительные затраты энергии, или приоритет связывают с важностью цели, которая может появиться в зоне, с ее скоростью и т.д. При этом возможно выделение буферной (неприоритетной) зоны, в которой дальность уменьшают до величины, обеспечивающей баланс отводимой и затрачиваемой энергии (там же). Таким же способом можно сократить число направлений, подлежащих осмотру, исключив из осмотра угловые направления, вероятность наличия в которых целей мала. Для минимизации вероятности пропуска цели представляется целесообразным связывать приоритет в обслуживании углового направления с вероятностью появления в ней цели.
Недостаток этого способа состоит в том, что в реальных условиях работы трудно определить вероятность наличия цели в каждом направлении пространства обзора, для этого необходимо иметь априорную информацию.
Итак, из приведенного выше следует, что проблема «импульсного голода» возникает, главным образом, из-за того, что РЛС с игольчатым лучом должна осматривать большое количество угловых направлений за ограниченный промежуток времени и сопровождать при этом цели. В то же время современные обзорные РЛС S-диапазона используются в условиях, когда в контролируемом пространстве может одновременно находиться лишь несколько сотен целей. Это означает, что для рассмотренного выше примера из М≥5000 разрешаемых угловых направлений лишь в малой их доле содержатся цели, а остальные направления являются «пустыми» (т.е. не содержащими целей).
Наиболее близким способом является способ радиолокационного обзора пространства, основанный на взаимодействии основной и вспомогательной РЛС и заключающийся в том, что в процессе обзора пространства с помощью основной РЛС с широким лучом в угломестной плоскости обнаруживают цели, измеряют дальность и азимут и по этим данным с помощью вспомогательной РЛС с широким лучом в азимутальной плоскости измеряют угол места целей (Сиверс А.П., Суслов Н.А., Метельский В.И. Основы радиолокации, Ленинград, Судпромгиз, 1959, с.159; Справочник по радиолокации. / Под ред. М.Сколника, т.4., М.: Сов. радио, 1978, с.68-69). Способ реализуется известным комплексом РЛС, выбранным в качестве прототипа и состоящим из основной РЛС с широким лучом в угломестной плоскости и вспомогательной РЛС с широким лучом в азимутальной плоскости, при этом выход основной РЛС, предназначенный для передачи данных о дальности и азимуте цели, соединен со входом вспомогательной РЛС, а выход вспомогательной РЛС, предназначенный для передачи данных об угле места цели, соединен со входом основной РЛС (там же).
Преимуществом наиболее близкого способа является отсутствие проблемы «импульсного голода», поскольку основная РЛС имеет широкий луч в угломестной плоскости, а вспомогательная РЛС имеет широкий луч в азимутальной плоскости и к тому же работает эпизодически только по обнаруженным основной РЛС целям.
Недостатки наиболее близких способа и комплекса РЛС состоят в следующем:
- с помощью только основной РЛС нельзя определить точное местоположение цели;
- неоднозначное определение угла места, а следовательно, и местоположения целей, если в пределах лучей РЛС находится несколько целей на одинаковых дальностях;
- практически исключена возможность сопровождения высокоскоростных целей из-за вероятного перепутывания углов места целей при их перемещении.
Все эти недостатки делают невозможным применение наиболее близких способа и прототипа в современных условиях, когда основными являются высокоскоростные цели.
Заявляемое изобретение направлено на устранение указанных недостатков.
Решаемой задачей (техническим результатом) является обеспечение возможностей однозначного определения с высокой точностью местоположения целей и ведения их сопровождения, присущих РЛС с игольчатым лучом, при сохранении преимущества прототипа - отсутствие проблемы «импульсного голода». Задача решается на основе сокращения затрат времени РЛС с игольчатым лучом на осмотр «пустых» угловых направлений, а также направлений, в которых действует пассивная помеха.
Заявленный технический результат достигается тем, что в способе радиолокационного обзора пространства, основанном на взаимодействии основной и вспомогательной РЛС, в процессе обзора с помощью основной РЛС с игольчатым лучом обнаруживают цели, определяют их местоположение и ведут их сопровождение, а с помощью вспомогательной РЛС определяют координаты угловых направлений, не содержащих признаков наличия в них целей, и при обзоре пространства с помощью основной РЛС эти направления не осматривают.
Также тем, что в качестве признаков наличия целей в угловом направлении используют наличие отраженного сигнала, повышенный уровень шума, наличие организованных помех, наличие излучений в диапазоне частот радиоэлектронных средств.
Заявленный технический результат достигается тем, что в способе радиолокационного обзора пространства, основанном на взаимодействии основной и вспомогательной РЛС, в процессе обзора с помощью основной РЛС с игольчатым лучом обнаруживают цели, определяют их местоположение и ведут их сопровождение, а с помощью вспомогательной узкополосной РЛС определяют координаты угловых направлений, не содержащих признаков наличия в них целей, и при обзоре пространства с помощью основной РЛС эти направления не осматривают, а при обнаружении отраженного от цели сигнала с доплеровским сдвигом вспомогательной узкополосной РЛС измеряют его и для обнаружения этой цели согласовывают устройство обработки сигнала основной РЛС с доплеровским сдвигом.
Также тем, что в качестве признаков наличия целей в угловом направлении используют наличие отраженного сигнала с доплеровским сдвигом, повышенный уровень шума, наличие активных организованных помех, наличие излучений в диапазоне частот радиоэлектронных средств.
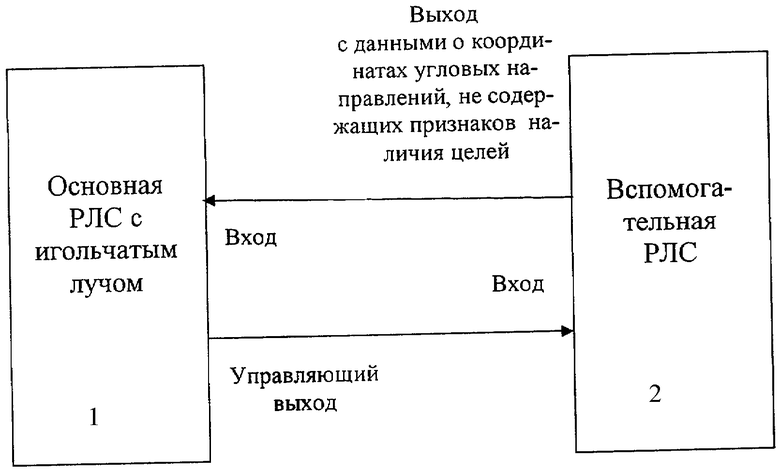
Заявленный технический результат достигается тем, что в комплексе РЛС, состоящем из основной и вспомогательной РЛС, причем вход основной РЛС соединен с выходом вспомогательной РЛС, а выход основной РЛС соединен со входом вспомогательной РЛС, при этом основная РЛС имеет игольчатый луч, выход вспомогательной РЛС предназначен для передачи данных о координатах угловых направлений, не содержащих признаков наличия целей, а выход основной РЛС является управляющим и предназначен для управления режимами работы вспомогательной РЛС.
Также тем, что вспомогательная РЛС является узкополосной.
Суть заявленных способов основывается на следующем.
Основная РЛС с игольчатым лучом осуществляет обзор пространства, обнаруживает цели, определяет их местоположение, ведет их сопровождение, но при этом пропускает (не осматривает) «пустые» угловые направления, координаты которых подаются на ее вход с выхода вспомогательной РЛС (см. чертеж). За счет исключения из осмотра «пустых» угловых направлений снимается проблема «импульсного голода» для РЛС с игольчатым лучом. Вспомогательная РЛС, осуществляя обзор пространства, зондирует угловые направления и дополнительно может анализировать состав электромагнитных (э.м.) колебаний, принимаемых с каждого углового направления. Если вспомогательная РЛС не обнаруживает своего отраженного сигнала (с доплеровским сдвигом для случая, если она узкополосная) или других э.м. колебаний (повышенного уровня шума, организованных помех, излучений в диапазоне частот радиоэлектронных средств), то принимают решение о том, что осматриваемое направление «пустое» (не содержащее признаков наличия целей), и передают его координаты на вход основной РЛС.
При этом от вспомогательной РЛС не требуется определять в осматриваемом направлении местоположение цели (т.е. не требуется измерять дальность); не требуется разрешать цели ни по дальности, ни в пределах луча по угловым координатам; не требуется подавлять помехи (для случая, если она узкополосная - активные помехи), сопровождать цели, обеспечивать низкую, как в основной РЛС, вероятность ложной тревоги («пустое» направление принимать за направление, содержащее признак наличия целей), но требуется обеспечить низкую вероятность пропуска признака наличия целей.
Отсутствие требования измерения дальности и разрешения цели по дальности позволяет выполнять вспомогательную РЛС узкополосной, что значительно упрощает приемо-передающий тракт РЛС; отсутствие требования высокого разрешения по угловым координатам снижает требование к малым угловым размерам луча РЛС (требуемые размеры определяются необходимой степенью сокращения числа угловых направлений, подлежащих осмотру основной РЛС); отсутствие высоких требований к помехозащищенности упрощает построение антенной системы и устройств обработки сигнала; отсутствие требования по сопровождению цели не требует обязательного электронного сканирования лучом. Все перечисленное в совокупности позволяет использовать в качестве вспомогательной РЛС упрощенную и дешевую РЛС.
Сравнительно высокие требования к надежности обнаружения вспомогательной РЛС признака наличия цели (пропуск его приведет к пропуску в осмотре основной РЛС углового направления и, следовательно, к пропуску находящейся там цели) может быть обеспечено в т.ч. увеличением допустимого уровня ложной тревоги (это приведет лишь к просмотру основной РЛС «пустого» углового направления), которая будет определяться допустимым суммарным размером угловых направлений, подлежащих осмотру основной РЛС, что, в свою очередь, будет зависеть от числа сопровождаемых целей. Поэтому при необходимости можно изменять порог обнаружения вспомогательной РЛС (управлять режимом работы) признака наличия цели в зависимости от числа сопровождаемых целей. Для этого в заявляемом комплексе РЛС управляющий выход основной РЛС1 соединен со входом вспомогательной РЛС2 (см. чертеж).
Поскольку вспомогательная РЛС может быть узкополосной, то она может с высокой точностью и однозначно (в отличие от широкополосной основной РЛС) измерять доплеровский сдвиг частоты отраженного от цели сигнала. Знание этого сдвига позволяет обеспечить согласование устройства обработки сигнала основной РЛС с доплеровским сдвигом, что обеспечит повышение надежности обнаружения этой цели, в том числе на фоне пассивных помех, и сократит необходимые затраты времени основной РЛС на просмотр угловых направлений, в которых действует пассивная помеха. При этом вспомогательная РЛС может просматривать направления, в которых действует пассивная помеха (организованная или естественная - местные предметы, метеообразования), и легко их вскрывать, и тогда признаком наличия цели может служить отраженный сигнал вспомогательной РЛС с доплеровским сдвигом, а при отсутствии сдвига направление считается «пустым», что исключает необходимость его просмотра основной РЛС.
Таким образом, из изложенного следует, что заявленный способ сохраняет возможность однозначного определения с высокой точностью местоположения целей и ведения их сопровождения, присущую РЛС с игольчатым лучом, и устраняет проблему «импульсного голода», чем и достигается решение поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ радиолокационного обзора пространства, радиолокационная станция для его осуществления и радиолокационный передающий модуль | 2017 |
|
RU2671234C1 |
| Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления | 2017 |
|
RU2667485C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ЗОНЫ ПРОСТРАНСТВА | 2009 |
|
RU2400768C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2008 |
|
RU2400767C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2008 |
|
RU2367973C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2010 |
|
RU2439606C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ЗОНЫ ПРОСТРАНСТВА | 2008 |
|
RU2377595C1 |
| Двухэтапный способ радиолокационного обнаружения цели | 2016 |
|
RU2633995C1 |
Изобретения относятся к области радиолокации и могут быть использованы в обзорных радиолокационных станциях (РЛС) с игольчатым лучом. Достигаемый технический результат изобретения - сохранение возможности однозначного определения с высокой точностью местоположения целей и ведения их сопровождения. Указанный результат достигается за счет сокращения затрат времени РЛС с игольчатым лучом на осмотр «пустых» угловых направлений, а также направлений, в которых действует пассивная помеха. Сущность изобретений состоит в том, что обзор пространства осуществляют основной и вспомогательной РЛС, при этом с помощью основной РЛС с игольчатым лучом обнаруживают цели, определяют их местоположение и ведут их сопровождение, а с помощью вспомогательной РЛС определяют координаты угловых направлений, не содержащих признаков наличия в них целей, и при обзоре пространства с помощью основной РЛС эти направления не осматривают; при этом в качестве признаков наличия целей в угловом направлении используют наличие отраженного сигнала, повышенный уровень шума, наличие организованных помех, наличие излучений в диапазоне частот радиоэлектронных средств; кроме того, при использовании в качестве вспомогательной - узкополосной РЛС при обнаружении отраженного от цели сигнала с доплеровским сдвигом вспомогательной узкополосной РЛС измеряют его и для обнаружения этой цели согласовывают устройство обработки сигнала основной РЛС с доплеровским сдвигом, при этом в качестве признаков наличия целей в угловом направлении используют наличие отраженного сигнала с доплеровским сдвигом, повышенный уровень шума, наличие активных организованных помех, наличие излучений в диапазоне частот радиоэлектронных средств; способы реализуются комплексом РЛС, состоящим из основной и вспомогательной РЛС, причем вход основной РЛС соединен с выходом вспомогательной РЛС, а выход основной РЛС соединен со входом вспомогательной РЛС, при этом основная РЛС имеет игольчатый луч, выход вспомогательной РЛС предназначен для передачи данных о координатах угловых направлений, не содержащих признаков наличия целей, а выход основной РЛС является управляющим и предназначен для управления режимами работы вспомогательной РЛС, кроме того, вспомогательная РЛС может быть узкополосной. 3 н. и 3 з.п. ф-лы, 1 ил.
1. Способ радиолокационного обзора пространства, основанный на взаимодействии основной и вспомогательной радиолокационных станций (РЛС), отличающийся тем, что в процессе обзора с помощью основной РЛС с игольчатым лучом обнаруживают цели, определяют их местоположение и ведут их сопровождение, а с помощью вспомогательной РЛС осуществляют обзор пространства, зондируют угловые направления, определяют координаты угловых направлений, не содержащих признаков наличия в них целей, и при обзоре пространства с помощью основной РЛС эти направления не осматривают.
2. Способ по п.1, отличающийся тем, что в качестве признаков наличия целей в угловом направлении используют наличие отраженного сигнала вспомогательной РЛС и дополнительно повышенный уровень шума, наличие организованных помех, наличие излучений в диапазоне частот радиоэлектронных средств.
3. Способ радиолокационного обзора пространства, основанный на взаимодействии основной и вспомогательной радиолокационных станций (РЛС), отличающийся тем, в процессе обзора с помощью основной РЛС с игольчатым лучом обнаруживают цели, определяют их местоположение и ведут их сопровождение, а с помощью вспомогательной узкополосной РЛС определяют координаты угловых направлений, не содержащих признаков наличия в них целей, и при обзоре пространства с помощью основной РЛС эти направления не осматривают, а при обнаружении отраженного от цели сигнала с доплеровским сдвигом вспомогательной узкополосной РЛС измеряют его и для обнаружения этой цели согласовывают устройство обработки сигнала основной РЛС с доплеровским сдвигом.
4. Способ по п.3, отличающийся тем, что в качестве признаков наличия целей в угловом направлении используют наличие отраженного сигнала с доплеровским сдвигом, повышенный уровень шума, наличие активных организованных помех, наличие излучений в диапазоне частот радиоэлектронных средств.
5. Комплекс радиолокационных станций (РЛС), состоящий из основной и вспомогательной РЛС, причем вход основной РЛС соединен с выходом вспомогательной РЛС, а выход основной РЛС соединен с входом вспомогательной РЛС, отличающийся тем, что основная РЛС имеет игольчатый луч, выход вспомогательной РЛС предназначен для передачи данных о координатах угловых направлений, не содержащих признаков наличия целей, а выход основной РЛС является управляющим и предназначен для управления режимами работы вспомогательной РЛС.
6. Комплекс РЛС по п.5, отличающийся тем, что вспомогательная РЛС является узкополосной.
| Справочник по радиолокации | |||
| / Под ред | |||
| М.Сколника | |||
| - М.: Советское радио, 1978, с.68, 69 | |||
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА | 2001 |
|
RU2215303C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| RU 99121550 A, 27.08.2001 | |||
| US 2006202886 A1, 14.09.2006 | |||
| KR 20070116984 A, 11.12.2007 | |||
| WO 2007022376 A2, 22.02.2007. | |||

