Изобретение относится к системам автоматического регулирования полета и может быть использовано для управления боковым движением легких и сверхлегких самолетов, малоразмерных дистанционно пилотируемых летательных аппаратов (МДПЛА) и им подобных.
Известное устройство управления боковым движением летательного аппарата, реализованное в автопилоте АП-28Г1 (Бортовые системы управления полетом. Под общей редакцией Ю.В.Байбородина, М.: Транспорт, 1975. - 336 с.) - [1, с.242-243], с законами управления

содержит гироскопический датчик угла крена, датчики угловой скорости относительно продольной ОХ и нормальной оси OY, каналы элеронов и руля направления, выполненные в виде последовательно соединенных суммирующего усилителя и исполнительного механизма, выходом подключенного через блок обратной связи к вычитающему входу суммирующего усилителя, изодромное звено в канале руля направления.
Данное устройство позволяет получить удовлетворительные переходные процессы в боковом движении летательного аппарата, однако требует введения в состав системы управления гироскопического датчика углов крена. Введение гироскопического датчика углов крена приводит к значительному увеличению стоимости, массы и габаритов системы управления, что не всегда приемлемо для устройств управления, применяемых на МДПЛА, а также легких и сверхлегких летательных аппаратах.
Известное устройство управления боковым движением летательного аппарата (Романенко Л.Г., Филюнин С.В., Шилова Н.А. Автопилот. - G 05 D 1/08, G 05 B 11/00, Авторское свидетельство №1802357, опубл. бюл. №10 от 15 марта 1993 г.) - [2], реализующее закон управления элеронами и рулем направления вида


содержит формирователь сигнала управления, датчик скоростного напора и каналы руля направления и элеронов, каждый из которых состоит из последовательно соединенных датчика угловой скорости соответственно относительно нормальной OY и продольной ОХ осей, блока переменных коэффициентов, суммирующего усилителя, формирователя закона управления и исполнительного механизма, выходом подключенного через блок обратной связи к первому вычитающему входу суммирующего усилителя, кроме того, канал руля направления содержит изодромное звено, а выход датчика скоростного напора соединен с управляющими входами блоков переменных коэффициентов обоих каналов, также установлены датчик боковой перегрузки, сумматор, блок умножения и блок определения знака, причем выход датчика угловой скорости относительно нормальной оси OY соединен с входом изодромного блока канала курса, с вторым входом блока умножения, с вычитающим входом сумматора и с входом блока определения знака, подключенного выходом ко второму входу блока умножения, соединенного третьим входом с выходом сумматора, а выходом с вторым суммирующим входом суммирующего усилителя канала элеронов, подключенного третьим суммирующим входом к выходу формирователя сигнала управления и к суммирующему входу сумматора, выход датчика боковой перегрузки соединен с вторым вычитающим входом суммирующего усилителя канала руля направления, подключенного вторым суммирующим входом к выходу изодромного блока канала курса.
В приведенном устройстве управления боковым движением будут достаточно большие отклонения летательного аппарата от установившегося режима полета под действием возмущений. Уменьшить отклонение летательного аппарата от установившегося режима полета под действием возмущений можно, не меняя структуру автопилота, увеличением коэффициента демпфирования относительно продольной оси ОХ. В этом случае возмущения вызовут меньшее отклонение летательного аппарата. Но при наличии большого демпфирования относительно продольной оси ОХ летательный аппарат будет медленнее возвращаться к установившемуся режиму полета. Следовательно, более длительное время будет существовать крен летательного аппарата, что приведет к большему отклонению летательного аппарата по курсу вследствие действия момента флюгерности летательного аппарата и момента, вызванного отклонением руля направления под действием сигнала, пропорционального перегрузке относительно поперечной оси OZ летательного аппарата. Для уменьшения отклонения летательного аппарата по курсу после прекращения действия возмущения на этапе возвращения летательного аппарата к установившемуся режиму полета по крену желательно иметь меньшее значение коэффициента демпфирования относительно продольной оси ОХ. Уменьшить отклонение летательного аппарата по крену при действии возмущения относительно продольной оси ОХ и ускорить его возвращение в установившийся режим полета к исходному крену по окончании действия возмущения можно за счет увеличения коэффициента передачи в канале элеронов по угловой скорости вращения ωY относительно нормальной оси OY. Однако увеличение порции сигнала по угловой скорости ωY приводит к появлению значительного перерегулирования по углу крена.
Технический результат, на достижение которого направленно заявляемое изобретение, заключается в повышении эффективности противодействия летательного аппарата внешним возмущениям без увеличения времени его возвращения к невозмущенному режиму полета по окончании действия возмущений.
Технический результат достигается тем, что в устройство, содержащее каналы элеронов и руля направления, выполненные в виде последовательно соединенных датчика угловой скорости соответственно относительно продольной оси ОХ и нормальной оси OY, суммирующего усилителя и исполнительного механизма, выходом подключенного через блок обратной связи к вычитающему входу суммирующего усилителя, а также изодромное звено, входом соединенное с датчиком угловой скорости относительно нормальной оси OY, а выходом - с суммирующим усилителем канала руля направления, в канал элеронов дополнительно введен блок формирования нелинейного сигнала управления вида
где k - постоянный коэффициент, ωx - угловая скорость относительно продольной оси ОХ, ωy - угловая скорость относительно нормальной оси OY, первый вход которого соединен с выходом датчика угловой скорости относительно нормальной оси OY, второй вход которого соединен с выходом датчика угловой скорости относительно продольной оси ОХ, а выход соединен с входом суммирующего усилителя канала элеронов, содержащий последовательно соединенные первый блок умножения, релейное звено и второй блок умножения, второй вход которого соединен с выходом усилителя, вход которого соединен со вторым входом первого блока умножения, являющимся вторым входом блока формирования нелинейного сигнала управления, первым входом которого является первый вход первого блока умножения, а выходом является выход второго блока умножения.
Сущность изобретения поясняется на фиг.1 - фиг.3, где:
фиг.1 - блок-схема устройства управления боковым движением летательного аппарата;
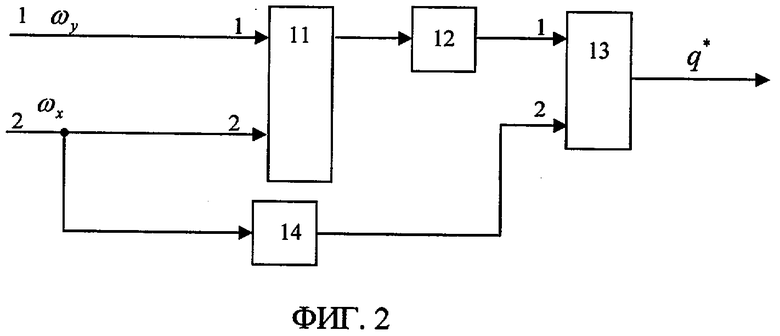
фиг.2 - блок-схема блока формирования нелинейного сигнала управления;
фиг.3 - графики переходных процессов летательного аппарата при линейном и нелинейном сигнале управления.
Устройство содержит:
1 - датчик угловой скорости относительно продольной оси ОХ;
2 - блок формирования нелинейного сигнала управления;
3 - суммирующий усилитель канала элеронов;
4 - исполнительный механизм канала элеронов;
5 - блок обратной связи канала элеронов;
6 - датчик угловой скорости относительно нормальной оси OY;
7 - изодромное звено;
8 - суммирующий усилитель канала руля направления;
9 - исполнительный механизм канала руля направления;
10 - блок обратной связи канала руля направления.
Приняты следующие обозначения:
ωX - угловая скорость относительно продольной оси ОХ;
ωY - угловая скорость относительно нормальной оси OY;
q* - сигнал, снимаемый с выхода блока формирования нелинейного сигнала управления;
δЭ - угол поворота элеронов;
δH - угол поворота руля направления.
Устройство содержит каналы элеронов и руля направления, выполненные в виде последовательно соединенных датчика угловой скорости соответственно относительно продольной оси ОХ 1 и нормальной оси OY 6, суммирующего усилителя 3, 8 и исполнительного механизма 4, 9, выходом подключенного через блок обратной связи 5, 10 к вычитающему входу суммирующего усилителя 3, 8, а также изодромное звено 7, входом соединенное с датчиком угловой скорости относительно нормальной оси OY 6, а выходом - с суммирующим усилителем канала руля направления 8. Второй вход суммирующего усилителя канала элеронов 3 соединен с выходом блока формирования нелинейного сигнала управления 2. Первый вход блока формирования нелинейного сигнала управления 2 соединен с выходом датчика угловой скорости относительно нормальной оси OY 6, второй вход соединен с выходом датчика угловой скорости относительно продольной оси OX 1.
Блок формирования нелинейного сигнала управления 2 (фиг.2) содержит:
11 - первый блок умножения;
12 - релейное звено;
13 - второй блок умножения;
14 - усилитель.
Блок формирования нелинейного сигнала управления 2 содержит последовательно соединенные первый блок умножения 11, релейное звено 12 и второй блок умножения 13. Второй вход второго блока умножения 13 соединен с выходом усилителя 14, вход которого соединен со вторым входом первого блока умножения 11, который является вторым входом блока формирования нелинейного сигнала управления 2, первым входом которого является первый вход первого блока умножения 11, а выходом является выход второго блока умножения 13.
Работа устройства происходит следующим образом. При действии на летательный аппарат внешних возмущений появляется угловая скорость летательного аппарата относительно продольной оси ОХ, приводящая к возникновению крена летательного аппарата. При этом возникает скольжение в сторону опущенной консоли крыла и разворот летательного аппарата по курсу под действием момента флюгерности.
Сигнал, пропорциональный угловой скорости летательного аппарата относительно продольной оси OX - ωX, снимается с датчика угловой скорости относительно продольной оси ОХ 1 и подается на первый вход суммирующего усилителя канала элеронов 3.
Сигналы, пропорциональные значениям угловых скоростей относительно продольной ωX и нормальной ωY осей, с блоков 1 и 6 поступают соответственно на второй и первый входы блока формирования нелинейного сигнала управления 2.
Блок формирования нелинейного сигнала управления 2 на своем выходе формирует сигнал управления в соответствии с законом

где k - постоянный коэффициент.
Для этого на первом блоке умножения 11 происходит перемножение сигналов, пропорциональных соответственно угловой скорости относительно продольной оси ОХ и нормальной оси OY, поступающих на второй и первый входы первого блока умножения 11. Сформированный сигнал поступает на релейное звено 12, на выходе которого формируется нулевое значение в случае неположительного значения входного сигнала или единичное значение при положительном значении входного сигнала. С выхода релейного звена 12 сигнал поступает на первый вход второго блока умножения 13. На второй вход второго блока умножения 13 поступает через усилитель 14 с коэффициентом усиления k сигнал, пропорциональный угловой скорости относительно продольной оси ОХ - ωX. Таким образом, на выходе второго блока умножения 13, который является выходом блока формирования нелинейного сигнала управления 2, формируется сигнал вида (1), который поступает на второй вход суммирующего усилителя канала элеронов 3.
Нелинейный сигнал управления, сформированный в блоке 2, вследствие увеличения демпфирования летательного аппарата будет противодействовать уходу летательного аппарата от установившегося режима полета при действии на него возмущения. При этом он не будет увеличивать и время возвращения летательного аппарата к установившемуся режиму полета по окончании действия возмущения вследствие восстановления исходного значения коэффициента демпфирования.
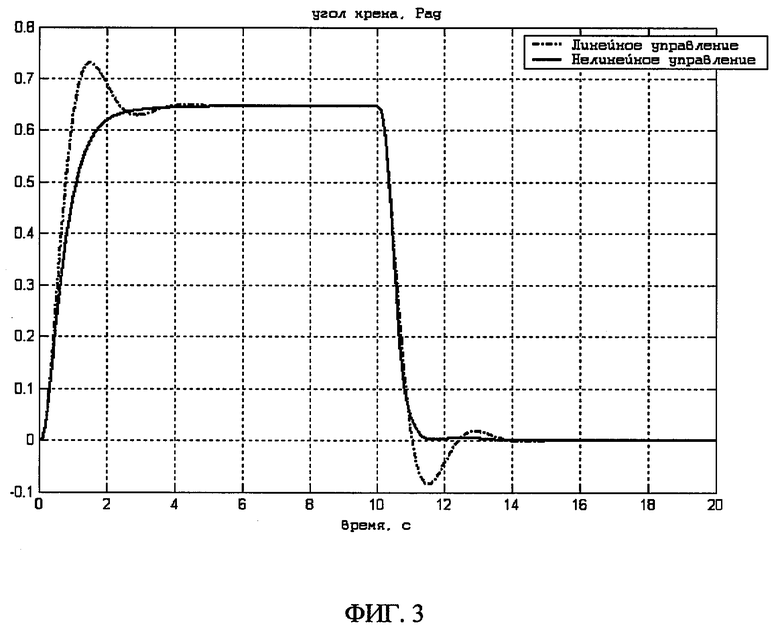
Эффективность применения нелинейного сигнала управления показана на фиг.3. На графике показана реакция летательного аппарата на ступенчатое возмущение, действующее в течение 10 секунд относительно продольной оси ОХ. Штрихпунктирной линией показана реакция летательного аппарата на действие возмущения при отсутствии блока формирования нелинейного сигнала управления (линейное управление). Непрерывной линией показана реакция летательного аппарата при использовании блока формирования нелинейного сигнала управления (нелинейное управление). Как следует из приведенных графиков переходных процессов, нелинейный сигнал управления замедляет угловую скорость относительно продольной оси ОХ и вследствие этого уменьшает отклонение летательного аппарата по крену при действии возмущения и не замедляет времени его возвращения к установившемуся режиму полета по окончании действия возмущения. Кроме этого, применение нелинейного сигнала управления позволяет уменьшить перерегулирование по углу крена, что способствует уменьшению отклонения летательного аппарата и по курсу. Отсутствие перерегулирования при уходе летательного аппарата от установившегося режима полета под действием возмущения вызвано увеличением демпфирования летательного аппарата. При возвращении летательного аппарата к установившемуся режиму полета демпфирование летательного аппарата соответствует исходному. При этом, как только летательный аппарат достигнет значения угла крена, соответствующего установившемуся режиму полета, и вследствие инерции начнет отклоняться в противоположную сторону, нелинейный сигнал управления мгновенно увеличит демпфирование летательного аппарата, препятствуя заметному появлению перерегулирования по углу крена, что видно из фиг.3.
Сформированный сигнал управления с выхода суммирующего усилителя канала элеронов 3 поступает на вход исполнительного механизма 4, осуществляющего непосредственное воздействие на элероны.
Отклонение руля направления происходит в соответствии с законом
Сигнал, пропорциональный угловой скорости относительно нормальной оси OY, увеличивает демпфирование летательного аппарата, что способствует более быстрому затуханию колебаний. Изодромное звено 7, пропуская переменную составляющую угловой скорости относительно нормальной оси OY, эффективно парирует при помощи руля направления воздействующие на летательный аппарат ветровые возмущения.
Для реализации предлагаемого устройства управления боковым движением летательного аппарата не требуется применение гироскопических датчиков позиционных сигналов, поэтому оно будет иметь меньшую массу, габариты и стоимость, обеспечивая эффективное противодействие летательного аппарата действию внешних возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| Автопилот | 1990 |
|
SU1802357A1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| Способ автоматического управления продольным движением беспилотного летательного аппарата при наличии ветрового возмущения | 2022 |
|
RU2784884C1 |
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |
Изобретение относится к области приборостроения и может найти применение в системах автоматического регулирования полетом для управления боковым движением легких и сверхлегких самолетов, малоразмерных дистанционно пилотируемых летательных аппаратов. Технический результат - расширение функциональных возможностей. Для достижения данного результата в канал управления элеронами введен блок формирования нелинейного закона управления вида 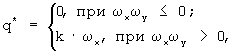 где k - постоянный коэффициент, ωх - угловая скорость относительно продольной оси OX, ωy - угловая скорость относительно нормальной оси OY, первый вход которого соединен с выходом датчика угловой скорости относительно нормальной оси OY, второй вход которого соединен с выходом датчика угловой скорости относительно продольной оси ОХ, а выход соединен с входом суммирующего усилителя канала элеронов. 1 з.п. ф-лы, 3 ил.
где k - постоянный коэффициент, ωх - угловая скорость относительно продольной оси OX, ωy - угловая скорость относительно нормальной оси OY, первый вход которого соединен с выходом датчика угловой скорости относительно нормальной оси OY, второй вход которого соединен с выходом датчика угловой скорости относительно продольной оси ОХ, а выход соединен с входом суммирующего усилителя канала элеронов. 1 з.п. ф-лы, 3 ил.
где k - постоянный коэффициент, ωх - угловая скорость относительно продольной оси ОХ, ωу - угловая скорость относительно нормальной оси OY, первый вход которого соединен с выходом датчика угловой скорости относительно нормальной оси OY, второй вход которого соединен с выходом датчика угловой скорости относительно продольной оси ОХ, а выход соединен с входом суммирующего усилителя канала элеронов.
| Автопилот | 1990 |
|
SU1802357A1 |
| Бортовые системы управления полетом | |||
| Под общей редакцией Ю.В.Байбородина | |||
| - М.: Транспорт, 1975, с.336 | |||
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| Боднер В.А | |||
| Системы управления ЛА | |||
| - М.: Машиностроение, 1973, с.87, с.181-182 | |||
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |

