Предлагаемое изобретение относится к тренировочным техническим средствам для развития силы мышц, а также может быть использовано для определения траектории движения штанги и биомеханических характеристик специальных упражнений (тяги рывковая и толчковая, подъем штанги на грудь) и основного, соревновательного, упражнения тяжелоатлетов - рывок классический.
Известно устройство для передачи срочной информации о мышечных усилиях при подъеме штанги [1]. Оно создано на основе динамометра - динамографическое устройство в виде «динамогрфического помоста» (Л.Н.Соколов). Усилие, прилагаемое к штанге, согласно третьему закону Ньютона передается на помост, опирающийся на упругие пружины, напряжение которых регистрируется посредством рычажных передач самописцем на лентопротяжном устройстве. Ознакомившись по окончании упражнения с записью своих усилий, спортсмен мог при необходимости в следующей попытке внести коррективы в технику выполнения упражнения.
Основное достоинство устройства - простота.
Основные недостатки:
- во-первых, получают интегральную характеристику;
- во-вторых, по этой характеристике нельзя судить о траектории движения штанги.
Известно устройство для тренировки тяжелоатлетов [2]. Целью его разработки являлось повышение эффективности тренировочного процесса тяжелоатлетов. Устройство содержит штангу, соединенную посредством гибкой тяги со средством для создания нагрузки, которое включает барабан с гибкой тягой. Барабан соединен с электродвигателем, имеющим тормоз. Через редуктор электродвигатель сблокирован с автотрансформатором. Средство для создания нагрузки работает от пульта управления.
Для направления работы устройства и фиксации происходящих реакций устройство оснащено контролирующей системой, имеющей тензоплощадку и регистрирующий прибор.
Работа устройства осуществляется следующим образом. Исходный режим сопротивления электродвигателя устанавливается по автотрансформатору вручную. Основной первичный импульс к действию устройство получает в тот момент, когда штангист, принявший исходное положение со штангой, начинает выполнять упражнение. Электродвигатель и контролирующая система включаются одновременно. При этом изменение силы тяги электродвигателя, приложенной к штанге через гибкую тягу, вызывает соответствующие изменения силы сопротивления штанги.
Таким образом, используя данное устройство, можно оптимизировать проявление и развитие силы и скорости на всем участке выполняемого упражнения за счет использования переменного режима сопротивления - это достоинство устройства.
Основными недостатками являются:
- во-первых, исходный режим сопротивления электродвигателя устанавливается по автотрансформатору вручную;
- во-вторых, нет и намека о траектории движения штанги.
Значение траектории движения очень велико. По высоте подъема штанги в тяге рывковой или толчковой можно определить готовность спортсмена к подъему штанги определенного веса в классических темповых упражнениях рывке или толчке. Каждый спортсмен определяет для себя этот показатель. Это придает ему уверенность при выполнении соревновательного упражнения.
Для определения пути подъема штанги на гриф снаряда прикрепляется пружинящее приспособление для карандаша или мела. Вплотную к штанге приставляется щит (имеющий по вертикали и горизонтали разметку в сантиметрах) так, чтобы пружины приспособления были несколько сжаты, а карандаш (мел) нажимал на щит [3].
При поднятии штанги карандаш (мел) отмечает ее путь (траекторию) на щите, и благодаря этому можно анализировать характер траектории и высоту подъема снаряда.
Достоинствами являются простота и малая себестоимость данного устройства.
К недостаткам устройства относится следующее:
- во-первых, траекторию, отображенную на щите, затруднительно ввести в компьютерную систему обработки результатов;
- во-вторых, оценка траектории движения штанги зависит от опыта тренера, то есть от влияния субъективного фактора.
Наиболее близким аналогом заявляемого изобретения является «Устройство для тренировки и определения биомеханических характеристик двигательного действия гиревика» [4]. В нем желоб изогнут и укреплен на наружной поверхности усеченного конуса таким образом, что сопротивление нагрузки в начальный момент двигательного действия минимальна, затем плавно увеличивается, после чего плавно уменьшается до первоначального значения.
Измерительный блок в устройстве включает датчик силы, тензометрическую платформу, датчик перемещения и гониометр, подключенные к системному блоку персонального компьютера через аналого-цифровые преобразователи. Вокруг каждой гири выполнена петля из тягового троса. Щечки одного из дополнительных блоков прикреплены к опоре рядом со щечками блока, расположенного у стойки, перпендикулярно им. Другой дополнительный блок прикреплен параллельно основанию в плоскости щечек первого дополнительного блока с возможностью перестановки и фиксирования его. Щечки третьего дополнительного блока расположены на противоположном от стойки краю основания с возможностью перемещения по оси и фиксирования.
Недостатком известного устройства является отсутствие возможности получения информации о положении штанги спортсмена.
Задачей изобретения является возможность получения информации о положении штанги спортсмена.
Технический результат, заключающийся в устранении указанных недостатков в устройстве для тренировки и определения траектории движения штанги и биомеханических характеристик двигательных действий тяжелоатлета, содержащем тензометрическую платформу, узел переменного сопротивления, измерительный узел, в который входят тензометрическая платформа, датчик силы, гониометр и три аналого-цифровых преобразователя, персональный компьютер, включающий системный блок, дисплей, клавиатуру, оптическую «мышь», программное обеспечение, принтер, трособлочную систему, достигается тем, что оно содержит помост, штангу и дополнительно снабжено пружинным наконечником с прикрепленной оптической «мышью» на его конце, надеваемого на конец грифа штанги, и доской, по которой скользит оптическая «мышь», подсоединенная к USB-порту системного блока компьютера, тензометрическая платформа, гониометр и датчик силы подключены к внутренней шине системного блока компьютера, в узле переменного сопротивления два тяговых троса трособлочной системы закреплены, каждый, напротив начала посадочной втулки для нагрузочных дисков грифа штанги, в помост введены два блочка, огибаемые указанными тяговыми тросами, каждый, прикрепленные к упомянутой втулке с обеих сторон грифа штанги, один непосредственно, а другой через датчик силы, подсоединяемый своим информационным выходом через аналого-цифровой преобразователь к внутренней шине системного блока компьютера, два гониометра закреплены на коленном и локтевом суставах тяжелоатлета, информационными выходами через аналого-цифровой преобразователь также подключены к внутренней шине системного блока компьютера, помост и узел переменного сопротивления соединены между собой с помощью средства выбора слабины тяговых тросов.
Узел переменного сопротивления содержит вертикальную стойку, укрепленную на основании узла, состоящего из горизонтальной опоры, горизонтально закрепленного на стойке вала, на котором насажены барабан средства для создания переменной нагрузки, связанного тросом с грузом, и усеченный конус, на наружной поверхности которого размещены желоб для намотки двух тяговых тросов и два приспособления для их закрепления на усеченном конусе, одно в начале желоба, а второе - в его конце, укрепленные на основании узла параллельно плоскости основания усеченного конуса, щечки двух блоков, огибаемых первым тяговым тросом, один из которых расположен рядом со стойкой, а другой - на противоположном от стойки краю основания узла параллельно плоскости основания усеченного конуса, щечки одного из блочков, огибаемых вторым тяговым тросом, прикреплены рядом со щечками блочка, огибаемого первым тяговым тросом и расположенного рядом со стойкой, но перпендикулярно им, блочок, огибаемый вторым тяговым тросом, имеет направляющую, и его посадочное место прикреплено параллельно основанию узла в плоскости щечек указанного блочка, щечки третьего блочка, огибаемого вторым тяговым тросом, прикреплены соосно со щечками блочка, огибаемого первым тяговым тросом, расположенным на противоположном от стойки краю основания в фиксированном положении, при этом тросы закреплены в конце желоба, к краю усеченного конуса, для изменения нагрузки от максимального значения до минимального или в начале желоба, вблизи усеченного конуса, для изменения нагрузки от минимального значения до максимального.
К центральной части донышка цилиндрической части пружинного наконечника, надеваемой на посадочную втулку для дисков грифа штанги, выполненной с возможностью вращения на грифе, прикреплен первый квадратный патрубок, в который вставлена пружина, и второй квадратный патрубок меньшего поперечного сечения, на который прикреплена оптическая «мышь» персонального компьютера, и к указанной цилиндрической части прикреплен рычаг, на котором с возможностью плавного перемещения размещена инертная масса, а программное обеспечение компьютера задает работу дисплею и оптической «мыши», при этом оптическая «мышь» имеет возможность контакта с доской, на которой прикреплен коврик для отображения движения штанги.
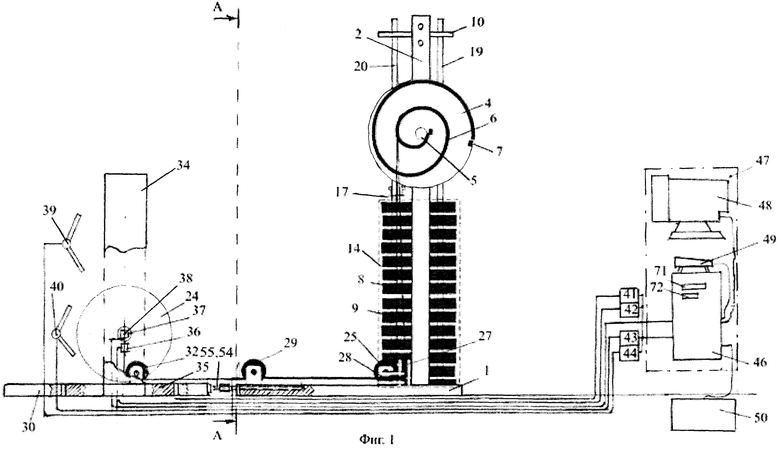
Устройство поясняется чертежами:
на фиг.1 - устройство, вид спереди;
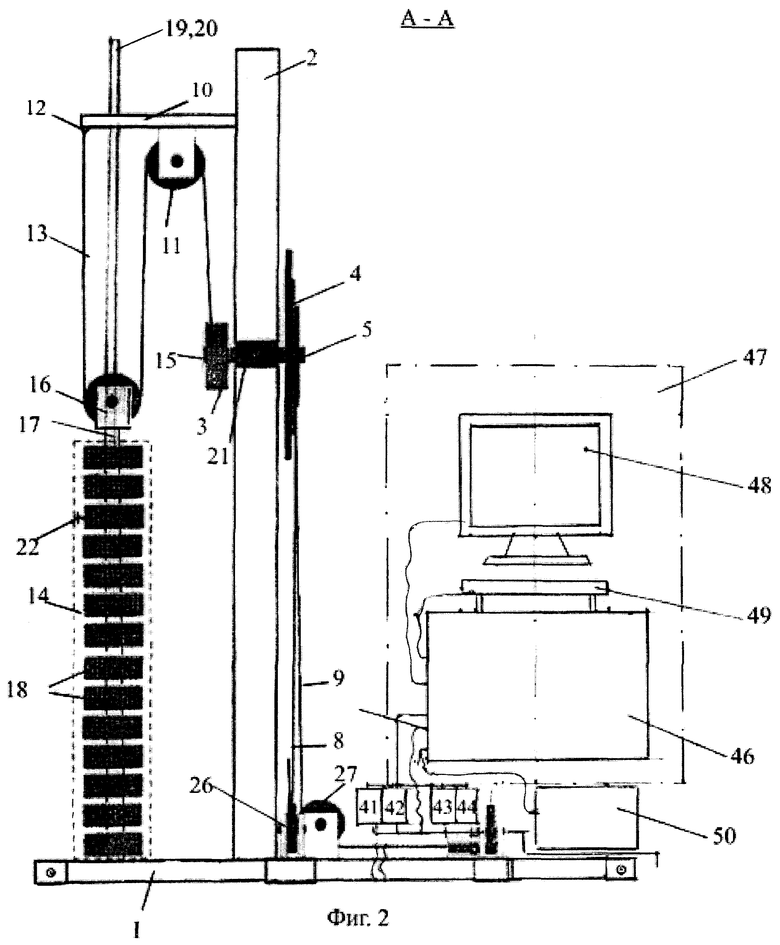
на фиг.2 - узел переменного сопротивления, вид сбоку слева;
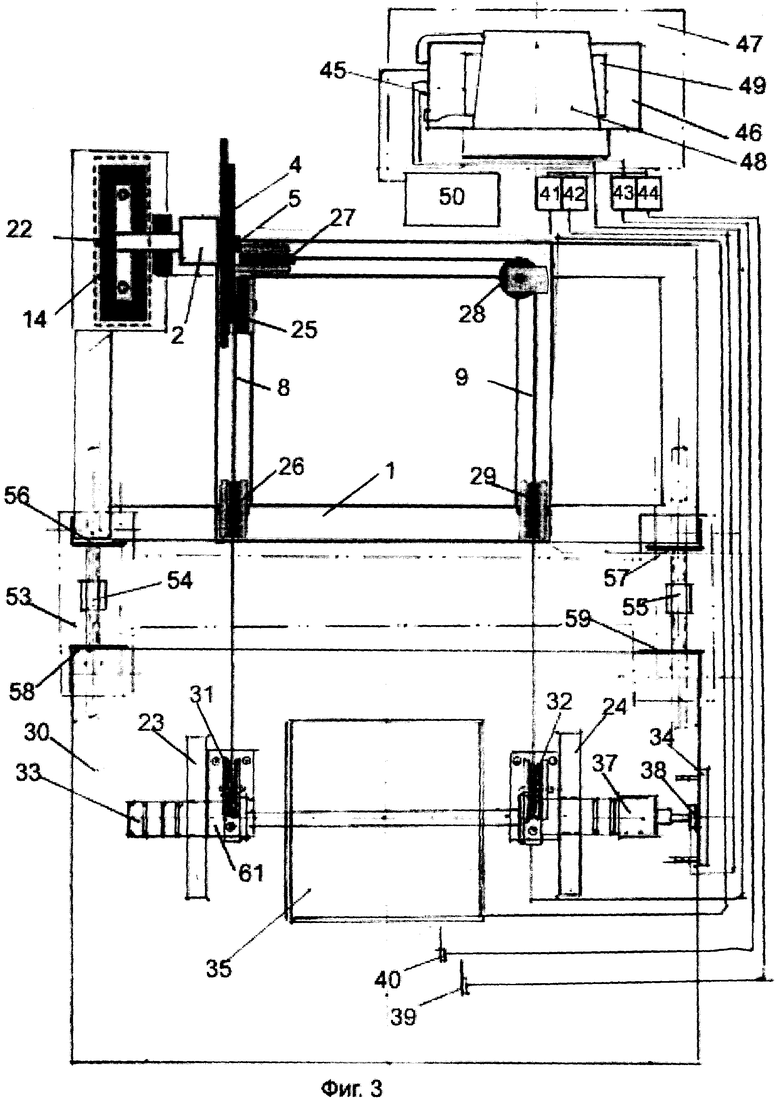
на фиг.3 - вид устройства сверху.
Устройство содержит узел переменного сопротивления, помост со штангой и тензометрической платформой, измерительный узел, персональный компьютер с программным обеспечением, средство выбора слабины троса.
Узел переменного сопротивления содержит: основание, состоящее из горизонтальной опоры 1, прикрепленной к ней вертикальной стойки 2 и вала 3. Вал 3 имеет участок 4, выполненный по форме усеченного конуса. Этот участок представляет собой тело вращения прямоугольной трапеции относительно боковой стороны, перпендикулярной основаниям трапеции, величина которой, как и величина меньшего основания, многократно меньше величины большего основания конуса. По оси конуса 4 сделана втулка 5 для посадки и фиксации на вал 3. На его наружной поверхности размещены желоб 6 и приспособление 7 для крепления тяговых тросов 8 и 9, наматываемых по желобу 6. Средство для создания нагрузки содержит кронштейн 10, установленный в верхней части вертикальной стойки 2, на котором размещены блочок 11 и приспособление 12, служащее для закрепления третьего конца троса, который связан с грузом 14 (оконтурен на чертежах пунктирной линией) и с барабаном 15, насаженным на вал 3. Через блочок 11 и полиспаст 16 (в данном случае одноблочный) он сочленен со стержнем 17, проходящим через элементы груза 18, которые в вертикальной плоскости скользят по двум направляющим 19 и 20, закрепленным на горизонтальной опоре 1 и кронштейне 10. Вал 3, на котором туго, но с возможностью поворота и фиксации посажены усеченный конус 4 и барабан 15, а также подшипник, закрепленный горизонтально на вертикальной стойке 2 с помощью корпуса подшипника 21. Масса груза 14 определяется количеством задействованных элементов 18. Предлагаемая конструкция этой части узла позволяет изменять величину груза с помощью штыря 22 (фиг.2), проходящего горизонтально через требуемый элемент 18 и стержень 17. Выбирая количество задействованных элементов груза 18, задают начальную массу груза 14, дополнительную к массе дисков штанги 23 и 24, подсоединенных к свободным концам тяговых тросов 8 и 9. Эта масса дополнительного груза 14 может уменьшаться при движении штанги, как показано на фиг.1, а может увеличиваться в случае необходимости после изменения закрепления и намотки тяговых тросов 8 и 9. Тяговый трос 8 огибает блоки 25, 26 узла переменного сопротивления (см. фиг.3), а тяговый трос 9 - блочки 27, 28, 29 этого узла. Особенностью данного узла является то, что щечки пятого блочка 27 прикреплены рядом со щечками третьего блочка 25, но перпендикулярно им, посадочное место для шестого блочка 28 с направляющей прикреплено параллельно горизонтальной опоре 1, щечки для седьмого блочка 29 прикреплены соосно со щечками четвертого блочка 26.
Помост со штангой. Данный узел содержит помост 30, выполненный из дерева, на котором установлены два блочка 31 и 32, через которые, огибая их, свободные концы тросов соединены с грифом 33 штанги (состоящей из указанного грифа 33 и нагрузочных дисков 23 и 24). С правой стороны помоста 30 закреплена перпендикулярно его поверхности доска 34.
Измерительный узел и персональный компьютер в своем составе имеют тензометрическую платформу 35, датчик силы 36, подпружиненный наконечник 37, заканчивающийся оптической «мышью» 38, гониометр для локтевого сустава 39 и гониометр для коленного сустава 40. Тензометрическая платформа 35 подключена к аналого-цифровому преобразователю (АЦП) 41, датчик силы 36 - к АЦП 42, гониометр локтевого сустава 39 - к АЦП 43 и гониометр коленного сустава 40 - к АЦП 44. Оптическая «мышь» подключена к USB-порту 45 системного блока 46 ПК 47. Все АЦП выходами подключены к внутренней шине системного блока 46 ПК 47, в который также входят дисплей 48, клавиатура 49, принтер 50 и оптическая «мышь» 38. Комплекс программ программного обеспечения ПК 47 записан на дискету или диск и инициируется с помощью соответствующего дисковода 51 или 52.
Средство выбора слабины 53 тяговых тросов содержит две шпильки 54 и 55 по концам с левой и правой резьбой, каждая, и граненой средней частью, два стальных уголка с резьбовым отверстием одного типа 56 и 57, например правым, и два стальных уголка с резьбовым отверстием другого типа 58 и 59, прикрепленных, например, первые - к опоре 1 узла переменного сопротивления, а вторые - к помосту 30. И в опоре 1, и в помосте 30 имеются просверленные отверстия для их вхождения.
Перед рассмотрением работы устройства необходимо остановиться на некоторых теоретических предпосылках его разработки.
Известно, что в каждом классическом упражнении тяжелой атлетики имеются ведущие фазы, составляющие его техническую основу [3, с.3]. Это подъем штанги до подседа в рывке и толчке, выталкивание штанги от груди и др. Перечисленные фазы следует выполнять максимально точно. Тогда оптимальной будет и траектория перемещения штанги, а развиваемые спортсменом усилия, направленные на подъем, будут использоваться максимально. Следовательно, чтобы совершенствоваться в рывке и толчке, необходимо знать не только рациональные движения звеньев тела, но и рациональную траекторию движения поднимаемой штанги. Мы не будем разбираться в подробности рационального движения звеньев тела, а сосредоточим внимание на рациональных траекториях движения штанги.
Положения тяжелоатлетов на старте зависят от роста спортсмена и пропорций звеньев его тела и поэтому значительно различаются. Однако главное условие - после выполнения подготовительных действий или без них в самый последний момент перед отрывом штанги от помоста атлет должен принять такое положение, чтобы его плечи были на одной линии с грифом. Подъем штанги (первая фаза тяги) начинается с того, что штангу отделяют от помоста (основания) спокойно, но в последующем ее движение должно быть равноускоренным. Гриф штанги расположен над серединой ступни или ближе к пяткам. Когда сгибание коленей и подведение их под гриф прекращается, гриф штанги должен находиться на уровне 1/3 - 2/3 длины бедра и достигать максимального приближения к спортсмену, которое равно в среднем от 4 до 10 см и более. Проекция грифа находится над серединой ступни или ближе к пяткам.
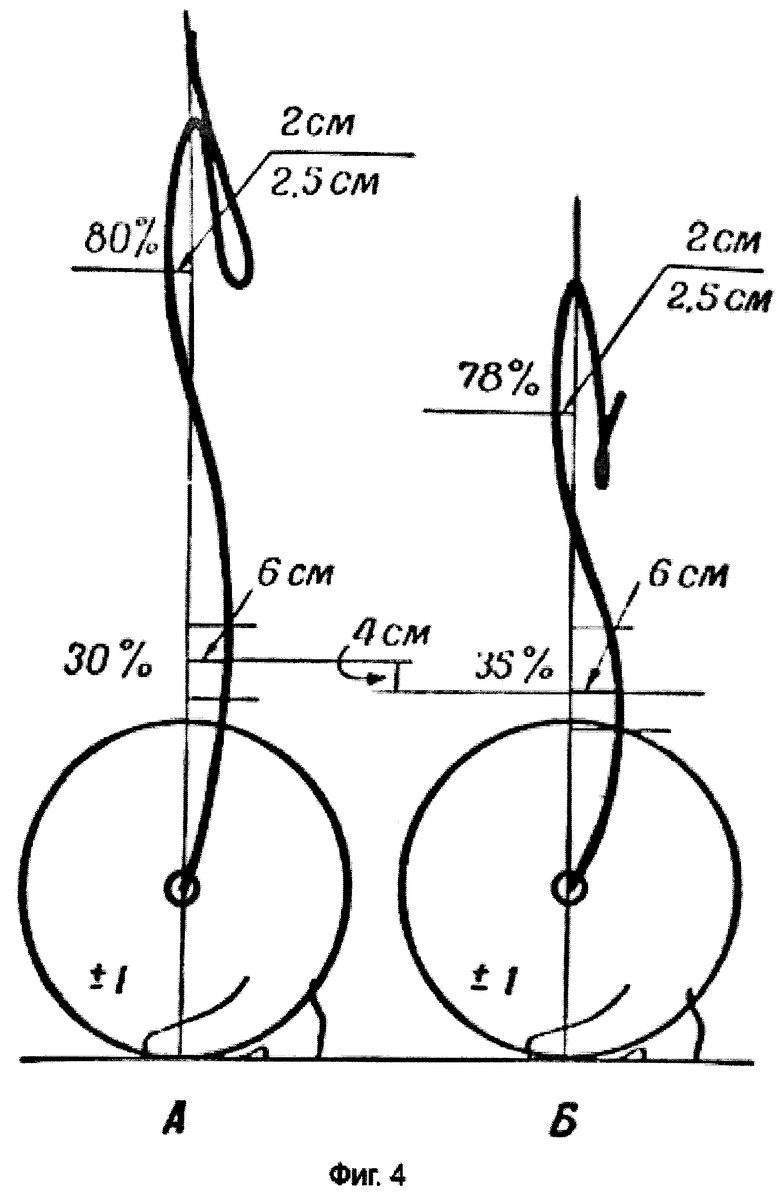
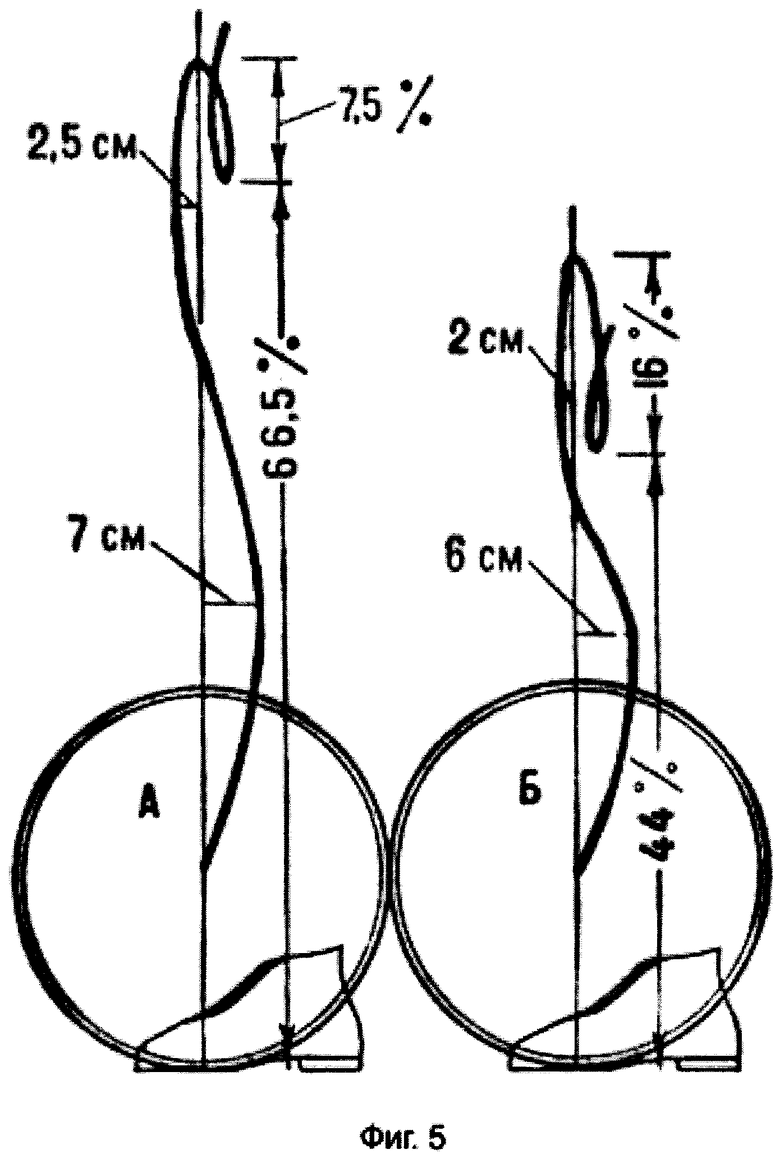
Пройденный штангой путь в этот момент составляет (фиг.3): в рывке в среднем 30% общего пути вверх (фиг.4А), в толчке (при поднимании штанги на грудь) в среднем 35% общего пути вверх (фиг.4Б). Если сравнить положения штанги в момент ее наибольшего приближения к спортсмену в рывке и толчке (при поднимании на грудь) у одних и тех же атлетов, то в первом случае штанга находится в среднем на 4 см выше, чем во втором (фиг.4). Это связано с разницей в ширине захвата грифа штанги.
Вторая заключительная фаза тяги - подрыв - выполняется одновременными усилиями мышц ног и туловища с последующим включением мышц рук. Атлет разгибает туловище и поднимается на носки. В момент подъема на носки плечевой пояс, гриф штанги и плюснефаланговые суставы должны находиться на одной вертикали. Если в этот момент плечевой пояс будет находиться впереди или сзади вертикальной линии относительно исходного положения, полной реализации мышечных усилий, направленных на подъем штанги, достигнуть невозможно [5].
К концу тяги штанга должна получить вертикальную скорость, равную при поднимании на грудь в толчке 1,4-1,8 м/сек, а в рывке 1,7-2,2 м/сек.
При этом штангу необходимо поднимать на 2-2,5 см впереди относительно плюснефаланговых суставов.
Подъем штанги до подседа должен выполняться в двухтактном ритме с акцентом на вторую фазу тяги - подрыв.
При выполнении второй фазы тяги штанга достигает наибольшего удаления от спортсмена, равного в среднем 2-2,5 см, когда проходит путь: в рывке - равный в среднем 80% общего пути вверх (фиг.4А), в толчке (при поднимании на грудь) - равный 78% общего пути вверх (фиг.4Б). В конце подрыва атлет находится в выпрямленном и несколько отклоненном положении. Для успешного подседа необходимо, чтобы штанга после подрыва продолжала некоторое время двигаться по инерции вверх. Этот отрезок времени используется для подседа.
Уход в подсед выполняется не только под действием силы тяжести тела спортсмена, но и в результате активного его воздействия на штангу. Во время ухода в подсед траектория движения штанги искривляется в направлении назад и заканчивается петлей.
Вернемся к подрыву. Подрыв должен носить «взрывной» характер [6, с.8]. В процессе подрыва происходит быстрое разгибание ног и туловища с последующим вставанием на носки, подниманием плечевых суставов вверх и несколько назад. Большинством атлетов подрыв в рывке выполняется за 0,15-0,25 сек, а при поднимании штанги на грудь для толчка - за 0,1-0,2 сек.
В связи с перемещением всей системы атлет-штанга в направлении новой опоры, ограниченной носками, штанга при подрыве движется вначале по дуге вперед от спортсмена, а затем почти вертикально вверх. В конце подрыва тело атлета выпрямлено и несколько отклонено назад.
К концу тяги вертикальная скорость движения штанги в зависимости от весовой категории и роста атлета должна быть равна: при поднимании на грудь для толчка - 1,4-1,8 м/сек, в рывке - 1,7-2,1 м/сек.
В заключительный момент подрыва, когда спортсмен поднимается на носки, центр тяжести его тела смещается в направлении назад, однако в результате смещения штанги вперед общий центр тяжести остается под опорой.
При выполнении второй фазы тяги штанга, как указывалось ранее, смещается на 2-2,5 см вперед относительно плюснефаланговых суставов [6, с.8]. Наблюдаются различия траектории движения штанги в тяге при рывке и толчке. При поднимании штанги на грудь для толчка траектория ее движения в самом начале круче, чем в рывке.
Описанная техника подъема штанги в тяге является оптимальной для атлетов нормального телосложения (мезоморфного типа), у которых проекция грифа на старте приходится на плюснефаланговые суставы, а штанга берется нормальным хватом. Естественно, не все атлеты принимают такое положение на старте. По-разному они берутся за штангу - одни используют более широкий захват, другие более узкий. А это ведет к изменению параметров перемещения тела атлета и штанги. Но общие закономерности остаются теми же.
После того как атлет выполнит вторую фазу тяги (подрыв), он подводит туловище под штангу и делает подсед. Чтобы подсед был успешным, штанга после подрыва должна продолжать некоторое время двигаться по инерции вверх. Этот отрезок времени используется для подседа. Он не должен выполняться преждевременно (до окончания подрыва), так как это снижает степень реализации силовых возможностей, направленных на подъем штанги. Подсед начинается не только под действием силы тяжести тела, но и в результате активного взаимодействия спортсмена со штангой. Сам подсед, подведение туловища и подворот рук под гриф должны выполняться максимально быстро. Во время подседа активную работу производят мышцы рук. Используя вначале силу мышц сгибателей, а затем разгибателей рук, атлет упирается в гриф и подводит туловище под штангу. Чем больше усилия рук, тем выше будет скорость ухода в подсед.
При переходе в подсед, в момент погашения скорости движения тела атлета, возникает большая инерционная сила [6, с.9]. Эта сила через руки приложена к грифу и действует в направлении движения штанги, способствуя ее подъему. Поэтому чем быстрее будет выполняться подсед, тем больший вес можно поднять. Центр тяжести спортсмена перемещается не только вниз, но и несколько вперед, вызывая компенсаторно(е) исправление (искривление) траектории движения штанги вверх - назад.
Атлет приходит в указанное выше положение не сразу, а в начале несколько сгибает и опускает туловище из более высокого положения. Амортизационная часть ухода начинается в момент, когда штанга прекращает движение вверх. В способе «разножка» это совпадает с постановкой ног на помост после безопорной или с положением, когда гриф штанги ложится на грудь. Нарастающему давлению вниз противопоставляется в основном сила ног.
Сразу после подрыва спортсмен некоторое время опирается ногами, затем находится в безопорном положении, после чего ноги ставятся на помост. Атлет опирается ногами о помост в рывке примерно 0,02-0,07 сек, в толчке (при поднимании штанги на грудь) - 0,05-0,15 сек. Безопорная часть подседа длится в рывке 0,15-0,33 сек, в толчке - 0,1-0,2 сек. Амортизационная часть подседа продолжается в рывке 0,15-0,35 сек, в толчке - 0,3-0,6 сек. Высота подъема штанги в рывке составляет от 70 до 78% роста атлета, в среднем - 74%, при поднимании на грудь для толчка - от 56 до 64% роста атлета, в среднем - 66% [6, с.10] (см. фиг.4). При выполнении рывка и поднимания на грудь для толчка способом «ножницы» штанга фиксируется, как правило, на большей высоте.
Определим аналитические выражения для нахождения траектории движения штанги в рывке и толчке.
Рывок. Высота подъема штанги составляет от 70 до 78% роста атлета, в среднем 74%, то есть 0,74 Н, где Н - рост спортсмена.
Путь, пройденный штангой, за вычетом половины диаметра диска нагрузки (Дд) штанги: в середине первой фазы составляет в среднем 30% от начала движения вверх, то есть (0,74 Н - 0,5 Дд)×0,3 при приближении в среднем на 6 см, в середине второй фазы тяги, когда штанга достигает наибольшего удаления от спортсмена 2-2,5 см, равный (0,74 Н - 0,5 Дд)×0,8; точка на условной нулевой линии между первой и второй фазами тяги - (0,74 Н-0,5 Дд)×0,6.
Толчок. Высота подъема штанги - от 54 до 64% роста атлета, в среднем - 60% от помоста (основания), то есть - 0,6 Н.
Путь, пройденный штангой, за вычетом половины диаметра нагрузки (Дд) штанги: в середине первой фазы, когда приближение штанги к спортсмену равно 6 см - составляет 35%, то есть (0,6 Н - 0,5 Дд) × 0,35; в середине второй фазы, когда штанга достигает наибольшего удаления в среднем 2-2,5 см от атлета, она проходит 78% общего пути вверх, то есть (0,6 Н - 0,5 Дд) × 0,78; точка на условной нулевой линии между первой и второй фазами тяги - (0,6 Н-0,5 Дд)× 0,66.
Прежде чем говорить об особенностях работы на устройстве, важно определиться, как относительно неточными измерительными средствами делать достаточно точные измерения. Это возможно сделать, по нашему мнению, выделив грубые измерения, и в каждом грубом измерении делать более точные замеры. Так, если выделить единичное перемещение объекта (штанги), ограничив виртуально его перемещение экраном дисплея, а при его большем изображении по X или Y его переход задать на следующем «листе» экрана дисплея и т.д. (грубое измерение) и сосчитать эти перемещения, а внутри каждого единичного перемещения с помощью оптической мыши сделать как бы точное позиционирование курсора дисплея, то таким образом можно получить достаточно точное измерение неточными измерительными средствами.
Относительно точным измерительным средством выступает оптическая мышь. Посмотрим, возможно ли это. «Зрение» оптическая компьютерная мышь [7] получает благодаря следующему процессу. С помощью светодиода и системы фокусирующих его свет линз под мышью подсвечивается участок поверхности. Отраженный от этой поверхности свет, в свою очередь, собирается другой линзой и попадает на приемный сенсор микросхемы-процессора обработки изображений (чип). Этот чип, в свою очередь, делает снимки поверхности под мышью с высокой стабильной частотой (кГц). Причем микросхема (назовем ее оптический сенсор) не только делает снимки, но сама же их и обрабатывает, так как содержит две ключевые части: систему получения изображения Image Acquisition Sistem (IAS) и интегрированный DSP процессор обработки снимков.
На основании анализа череды последовательных снимков (представляющих собой квадратную матрицу из пикселей разной яркости) интегрированный DSP процессор высчитывает результирующие показатели, свидетельствующие о направлении перемещения мыши вдоль осей X и Y, и передает результаты своей работы вовне по последовательному порту.
Необходимо учитывать, что информацию о перемещении мыши микросхема оптического сенсора передает через Serual Port (последовательный порт) не напрямую в компьютер. Данные поступают к еще одной микросхеме-контроллеру, установленной в мыши. Эта вторая главная микросхема в устройстве отвечает за реакцию на нажатие кнопок мыши, вращение колеса прокрутки и т.д. Данный чип передает уже непосредственно в персональный компьютер информацию о направлении перемещения мыши, конвертируя данные, поступающие с оптического сенсора, в передаваемые по интерфейсам PS/2 или USB сигналы. А уже компьютер, используя драйвер мыши, на основании поступившей по этим интерфейсам информации перемещает курсор-указатель по экрану дисплея.
Но вернемся к системе оптического слежения мыши. В целом система оптического слежения мыши помимо микросхемы-сенсора имеет еще несколько базовых элементов. Конструкция включает в себя держатель (Clip), в который устанавливается светодиод (Led) и непосредственно сама микросхема сенсора (Sensor). Эта система элементов крепится на печатную плату (РСВ), между которой и нижней поверхностью мыши (Base Plate) закрепляется пластиковый элемент (Lens), содержащий две линзы (о назначении которых говорилось выше). Оптимальное расстояние от элемента Lens до отражающей поверхности под мышью должно попадать в диапазон от 2,3 до 2,5 мм. Это рекомендации производителя сенсора. Вот почему оптические мыши плохо себя «чувствуют», «ползая» по оргстеклу на столе и всевозможным полупрозрачным «коврикам».
И все же основным элементом оптической компьютерной мыши является микросхема сенсора. Рассмотрим лучшую из известных микросхем сенсора [7]. Оптический сенсор ADNS-3060 по сравнению со своими «предками» обладает поистине впечатляющим набором характеристик. Использование этой микросхемы, упакованной в корпус с 20-ю контактами, обеспечивает оптическим мышам невиданные ранее возможности. Допустимая максимальная скорость перемещения манипулятора (мыши) выросла до 40 дюймов/с, то есть достигла «знаковой» скорости в 1 м/с. Это уже очень хорошо - вряд ли хоть один из пользователей двигает мышью с превышающей данное значение скоростью. Допустимое ускорение выросло в 100 раз (!) и достигло величины 15 g (почти 150 м/с2). Теперь на разгон мыши с 0 до предельных 1 м/с отводится 0,07 с - теперь очень немногие могут превзойти это ограничение. Программируемая скорость осуществления снимков поверхности оптическим сенсором у новой модели чипа превышает 6400 кадров/с. Причем чип ADNS - 3060 может сам осуществлять подстройку частоты следования снимков для достижения наиболее оптимальных параметров работы в зависимости от поверхности, над которой перемещается мышь. Разрешение оптического сенсора по-прежнему составляет 400 или 800 cpi.
При этом поступающий с внешнего кварцевого резонатора в блок Oscillator сенсора сигнал, частота которого 24 МГц, служит для синхронизации всех вычислительных процессов, протекающих внутри оптического сенсора ADNS - 3060. Например, частота снимков этого оптического сенсора привязана к частоте внешнего генератора.
Таким образом, можно с помощью оптической компьютерной мыши и компьютера в целом производить достаточно точные измерения и выдавать в графическом и цифровом виде результаты этих измерений.
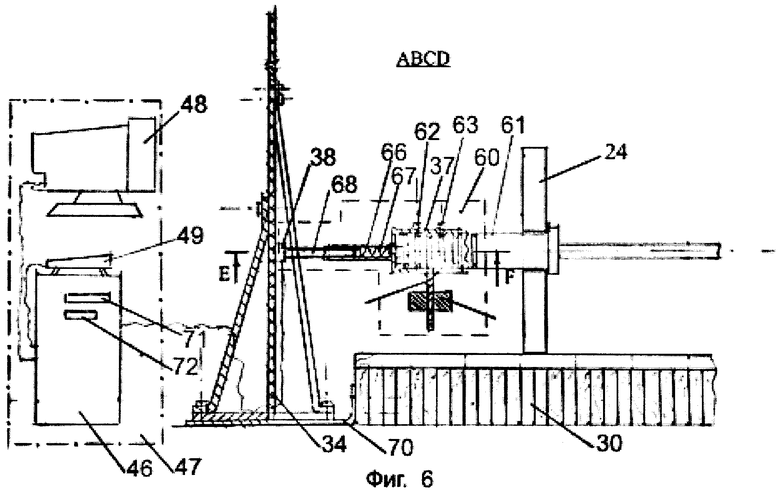
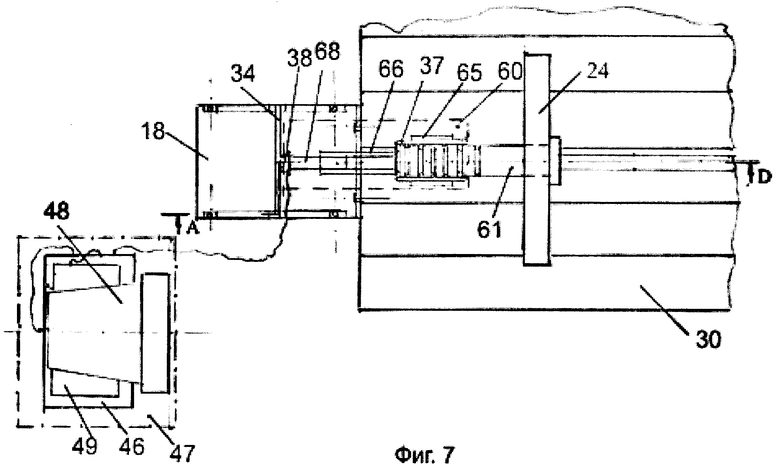
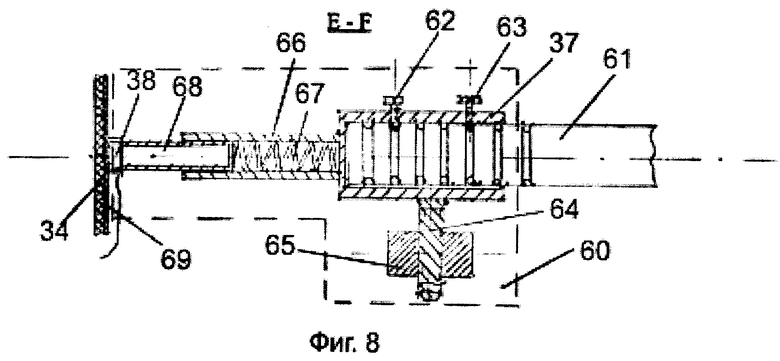
Измерительное средство для определения траектории движения штанги (фиг.6, 7) содержит пружинный наконечник 60 (оконтурен пунктирной линией), состоящий из цилиндрической части 37, надеваемой на втулку 61 грифа штанги с некоторой свободой вращения, обеспечиваемой винтами 62 и 63, входящими в пазы втулки 61 грифа штанги, но не зажимающие ее, а напротив этих винтов к цилиндрической части 37 закреплен, например, с помощью сварки рычаг 64, на котором размещена и плавно перемещается инертная масса 65, момент инерции которой поддерживает постоянство положения в пространстве пружинного наконечника 60. К центру донышка цилиндрической части 37 прикрепляются, например, сваркой первый квадратный патрубок 66, в который вставляется пружина 67, и второй квадратный патрубок 68 меньшего поперечного сечения, на который прикрепляется, например, приклеиванием миниатюрная оптическая «мышь» 38 персонального компьютера 47 (оконтурен штрихпунктирной линией), состоящего из системного блока 46, к которому подсоединена оптическая «мышь» 38, дисплея 48 и клавиатуры 49. Оптическая «мышь» 38 контактирует с доской 34 для отображения траектории движения штанги, установленной перпендикулярно втулке 61 грифа. На доску 34 прикреплен, например, путем наклеивания «коврик» 69 (см. фиг.8), по которому скользит оптическая «мышь» 38. Доска 34 жестко закреплена на поддоне 70, прикрепленном к помосту 30.
Программное обеспечение записано на дискете или диске, которые вставляются в соответствующие гнезда 71 или 72 системного блока 46 персонального компьютера 47, и инициируется с помощью клавиатуры 49.
Пользуются устройством следующим образом. Перед началом тренировки и исследования с помощью средства выбора слабины 53 тяговых тросов 8 и 9 убирают их слабину (если она есть). Затем выставляют начальную массу 14, задействовав необходимое количество элементов груза 18 с помощью штыря 22, тарируют датчик силы 36 и тензометрическую платформу 35. На локтевом и коленном суставах спортсмена закрепляют гониометры 39 и 40 и проверяют их работу. Проверяют также работу оптической «мыши» 38: устанавливают штангу с наконечником в исходное положение, чтобы оптическая «мышь» правильно контактировала с доской и наклеенным на ней «ковриком», область виртуальных ограничений и возможности позиционирования курсора дисплея с помощью оптической «мыши». В соответствующий дисковод 71 или 72 системного блока 46 персонального компьютера 47 вставляют диск или дискету с программным обеспечением и загружают его в системный блок 46, инициируя с помощью клавиатуры 49. Убедившись в правильности работы устройства в целом и отдельных узлов и элементов, то есть и программного обеспечения, можно начинать исследования, поднимая штангу.
Работает измерительный блок устройства следующим образом. Электрические аналоговые сигналы датчиков тензометрической платформы 35, датчика силы 36, гониометров локтевого сустава 39 и коленного сустава 40 подаются на входы аналого-цифровых преобразователей (АЦП) соответственно 41, 42, 43 и 44, где они преобразуются в цифровые коды, которые через интерфейс системного блока 46 поступают в память персонального компьютера 47 для последующей обработки, осуществляемой с помощью комплекса программ. Сигнал с оптической «мыши» 38 поступает непрерывно на USB-порт 45 системного блока 46, в котором он обрабатывается и подается на дисплей 48. Это позволяет практически сразу после выполнения упражнения получить цифровую и графическую информацию о его биомеханических характеристиках, которые выводятся по требованию на экран дисплея 48 персонального компьютера 47 или с помощью принтера 50 - на бумажный носитель.
В комплекс программ автоматической обработки информации входят: автоматический ввод и регистрация данных, предварительная обработка сигналов (сглаживание), тарировка входных сигналов, вывод графического изображения входных сигналов, в том числе траектории движения штанги, математическая обработка характеристик выполняемых упражнений.
Программа математической обработки позволяет выполнять расчет следующих биомеханических характеристик выполняемого упражнения: длительность всего упражнения и отдельных его фаз и периодов, величины угловых изменений в локтевом и коленном суставах, величины перемещения, скорости и ускорения движения, силы реакции опоры по пиковым значениям, импульса силы реакции опоры всего упражнения, его фаз и периодов.
По сравнению с прототипом применение данного устройства позволяет получить информацию о траектории движения штанги, что позволит существенно повысить эффективность тренировочного процесса спортсмена-штангиста за счет освоения правильной траектории перемещения снаряда. Возможность регистрировать, а в последующем и анализировать биомеханические характеристики упражнения позволяет прослеживать и корректировать тренировочный процесс в динамике, способствуя повышению эффективности тренировок и мастерства атлетов.
Источники информации
1. Фарфель B.C. Управление движениями в спорте. - М.: ФиС, 1975. - С.45.
2. Авторское свидетельство СССР №820854. Кл. А63В 69/00. Устройство для тренировки штангистов / Ю.Т.Черкесов.
3. Божко А.И. Тяжелая атлетика: Учеб. пособие для инструкторов. - М.: ФиС, 1966. - С.180.
4. Патент РФ №2291731 С2. Устройство для тренировки и определения биомеханических характеристик двигательного действия гиревика / В.В.Афанасенко, Т.Ю.Черкесов, Л.С.Дворкин и др.
5. Роман Р.А., Шакирзянов М.С. Жим, рывок, толчок: Техника лучших атлетов Мира. - М.: ФиС, 1970. - 143 с.
6. Роман Р.А., Шакирзянов М.С. Рывок, толчок: Техника лучших атлетов Мира. - М.: ФиС, 1978. - 110 с.
7. http: // www.ixbt.com/peripheral/mice-sensor.shtml.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНОГО ДЕЙСТВИЯ ГИРЕВИКА | 2004 |
|
RU2291731C2 |
| УСТРОЙСТВО ДЛЯ БИОМЕХАНИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКОЙ И ФИЗИЧЕСКОЙ ПОДГОТОВЛЕННОСТИ ТЯЖЕЛОАТЛЕТОВ | 2017 |
|
RU2658255C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ-ГИРЕВИКОВ | 2002 |
|
RU2242261C2 |
| СПОСОБ БИОМЕХАНИЧЕСКОЙ И ЭЛЕКТРОМИОГРАФИЧЕСКОЙ ОЦЕНКИ ТЯЖЕЛОАТЛЕТИЧЕСКИХ УПРАЖНЕНИЙ | 2020 |
|
RU2756567C1 |
| УСТРОЙСТВО БЕЗЫНЕРЦИОННОГО ЗАДАНИЯ ПЕРЕМЕННОГО СОПРОТИВЛЕНИЯ ИЛИ ОБЛЕГЧЕНИЯ В ТРЕНИРОВОЧНОМ ПРОЦЕССЕ СПОРТСМЕНОВ | 2003 |
|
RU2243016C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ АЛЬПИНИСТОВ | 2002 |
|
RU2245732C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2004 |
|
RU2313379C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПРИНТЕРОВ И ФУТБОЛИСТОВ | 2005 |
|
RU2297866C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ | 2009 |
|
RU2408404C1 |
Устройство для тренировки и определения траектории движения штанги и биомеханических характеристик двигательных действий тяжелоатлета содержит тензометрическую платформу, узел переменного сопротивления, измерительный узел, в который входят тензометрическая платформа, датчик силы, гониометр и три аналого-цифровых преобразователя, персональный компьютер, трособлочную систему. Оно содержит помост, штангу, пружинный наконечник с прикрепленной оптической «мышью» на его конце, надеваемый на конец грифа штанги, доску, по которой скользит оптическая «мышь», которая подсоединена к USB-порту системного блока компьютера. Тензометрическая платформа, гониометр и датчик силы подключены к внутренней шине системного блока компьютера. В узле переменного сопротивления два тяговых троса трособлочной системы закреплены, каждый, напротив начала посадочной втулки для нагрузочных дисков грифа штанги. В помост введены два блочка, огибаемые указанными тяговыми тросами, каждый, которые прикреплены к втулке с обеих сторон грифа штанги, один непосредственно, а другой через датчик силы, который подсоединен своим информационным выходом через аналого-цифровой преобразователь к внутренней шине системного блока компьютера. Два гониометра закреплены на коленном и локтевом суставах тяжелоатлета, информационными выходами через аналого-цифровой преобразователь также подключены к внутренней шине системного блока компьютера, помост и узел переменного сопротивления соединены между собой с помощью средства выбора слабины тяговых тросов. Использование данного изобретения позволяет получить информацию о положении штанги. 2 з.п. ф-лы, 8 ил.
1.Устройство для тренировки и определения траектории движения штанги и биомеханических характеристик двигательных действий тяжелоатлета, содержащее тензометрическую платформу, узел переменного сопротивления, измерительный узел, в который входят тензометрическая платформа, датчик силы, гониометр и три аналого-цифровых преобразователя, персональный компьютер, включающий системный блок, дисплей, клавиатуру, оптическую «мышь», программное обеспечение, принтер, трособлочную систему, отличающееся тем, что оно содержит помост, штангу и дополнительно снабжено пружинным наконечником с прикрепленной оптической «мышью» на его конце, одеваемым на конец грифа штанги, и доской, по которой скользит оптическая «мышь», подсоединенная к USB-порту системного блока компьютера, тензометрическая платформа, гониометр и датчик силы подключены к внутренней шине системного блока компьютера, в узле переменного сопротивления два тяговых троса трособлочной системы закреплены каждый напротив начала посадочной втулки для нагрузочных дисков грифа штанги, в помост введены два блочка, огибаемые указанными тяговыми тросами каждый, прикрепленные к упомянутой втулке с обеих сторон грифа штанги, один - непосредственно, а другой - через датчик силы, подсоединяемый своим информационным выходом через аналого-цифровой преобразователь к внутренней шине системного блока компьютера, два гониометра закреплены на коленном и локтевом суставах тяжелоатлета, информационными выходами через аналого-цифровой преобразователь также подключены к внутренней шине системного блока компьютера, помост и узел переменного сопротивления соединены между собой с помощью средства выбора слабины тяговых тросов.
2. Устройство по п.1, отличающееся тем, что узел переменного сопротивления содержит вертикальную стойку, укрепленную на основании узла, состоящего из горизонтальной опоры, горизонтально закрепленного на стойке вала, на котором насажены барабан средства для создания переменной нагрузки, связанного тросом с грузом, и усеченный конус, на наружной поверхности которого размещены желоб для намотки двух тяговых тросов и два приспособления для их закрепления на усеченном конусе, одно в начале желоба, а второе - в его конце, укрепленные на основании узла параллельно плоскости основания усеченного конуса, щечки двух блоков, огибаемых первым тяговым тросом, один из которых расположен рядом со стойкой, а другой - на противоположном от стойки краю основания узла параллельно плоскости основания усеченного конуса, щечки одного из блочков, огибаемых вторым тяговым тросом, прикреплены рядом со щечками блочка, огибаемого первым тяговым тросом и расположенного рядом со стойкой, но перпендикулярно им, блочок, огибаемый вторым тяговым тросом, имеет направляющую и его посадочное место прикреплено параллельно основанию узла в плоскости щечек указанного блочка, щечки третьего блочка, огибаемого вторым тяговым тросом, прикреплены соосно со щечками блочка, огибаемого первым тяговым тросом, расположенным на противоположном от стойки краю основания, в фиксированном положении, при этом тросы закреплены в конце желоба к краю усеченного конуса для изменения нагрузки от максимального значения до минимального или в начале желоба вблизи усеченного конуса для изменения нагрузки от минимального значения до максимального.
3. Устройство по п.1, отличающееся тем, что к центральной части донышка цилиндрической части пружинного наконечника, одеваемой на посадочную втулку для дисков грифа штанги, выполненной с возможностью вращения на грифе, прикреплен первый квадратный патрубок, в который вставлена пружина и второй квадратный патрубок меньшего поперечного сечения, на который прикреплена оптическая «мышь» персонального компьютера, и к указанной цилиндрической части прикреплен рычаг, на котором с возможностью плавного перемещения размещена инертная масса, а программное обеспечение компьютера задает работу дисплею и оптической «мыши», при этом оптическая мышь» имеет возможность контакта с доской, на которой прикреплен коврик для отображения движения штанги.
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНОГО ДЕЙСТВИЯ ГИРЕВИКА | 2004 |
|
RU2291731C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ТЯЖЕЛОАТЛЕТОВ | 1991 |
|
RU2011390C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 1995 |
|
RU2135244C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2000 |
|
RU2178720C1 |
| US 4721301 А, 26.01.1988 | |||
| US 4603855 A, 08.05.1986. | |||

