Изобретение относится к области формирования у спортсменов двигательных навыков и умений с помощью безынерционных силовых средств.
Наиболее близким аналогом относительно заявленного изобретения является машина управляющего воздействия (кн. Ю.Т.Черкесова “Машина управляющего воздействия и спорт”, Министерство науки и образования республики Адыгея, Майкоп, с.60-75).
Недостатком известного устройства является инерционность груза, размещенного на рычаге, влияние груза, особенно в динамике движения, - в начале движения груз мешает движению, а когда масса груза разгонится, ее действие продолжается в той области движения, где ее действие уже должно закончиться, т.е. мешает двигательному действию. Задачей предлагаемого изобретения является освобождение от грузовой массы и ее влияния на двигательные действия спортсмена, использование безынерционного силового элемента, например амортизатора. Технический результат в устройстве безынерционного задания переменного сопротивления или облегчения в тренировочном процессе спортсменов, содержащем блок переменного сопротивления и блок регистрации и информации о параметрах движения, первый из которых состоит из основания, в которое встроен помост и на котором установлены и закреплены две П-образные стойки, жестко соединенные между собой двумя перекладинами в верхней части П-образных стоек, на каждой из этих стоек имеется держатель для штанги, дискретно переставляемый и закрепляемый на стойке с помощью кронштейнов, а также из двух цепей, одними концами прикрепленных к грифу штанги сверху, а другими концами - снизу и перекинутых через две пары вращающихся на двух осях и валу звездочек, первая пара которых закреплена на валу, установленном с помощью втулок с подшипниками на верхних перекладинах упомянутых П-образных стоек, а вторая пара звездочек - на двух осях, установленных с помощью втулок с подшипниками на основании, при этом одна из цепей огибает пятую звездочку, аналогичную указанным четырем и закрепленную подвижно в вертикальной плоскости на П-образной стойке, в ее средней части, с возможностью стопорения, а также звездочку, ось которой закреплена на опоре, установленной на упомянутом основании, и на которой подвижно насажен рычаг, фиксируемый с помощью подпружиненного пальца на звездочке, ось которой закреплена на опоре, под разными углами, для чего на ней предусмотрены соответствующие отверстия, а второй блок - блок обработки, регистрации информации о параметрах движения, состоит из узла измерения параметров двигательного действия, содержащего тензометрические датчики, входящие в состав тензометрической платформы, встроенной в упомянутый помост, и датчики линейного перемещения и угловых изменений, подключенные через аналого-цифровой преобразователь к персональному компьютеру, достигается тем, что ось, на которой подвижно закреплена звездочка на опоре и подвижно насажен рычаг, закреплена консольно на упомянутой опоре, а силовое средство выполнено в виде амортизатора, один конец которого соединен скользяще-вращательно со свободным концом упомянутого рычага, а второй конец амортизатора закреплен на основании. Устройство дополнительно имеет узел выбора провисания и настройки амортизатора.
Амортизатор размещен в трубе, установленной на упомянутом основании, и один конец амортизатора прикреплен к рычагу через подвижный блочек, установленный на том же основании.
Датчик угловых изменений представляет собой гониометр.
Предлагаемое устройство поясняется чертежами:
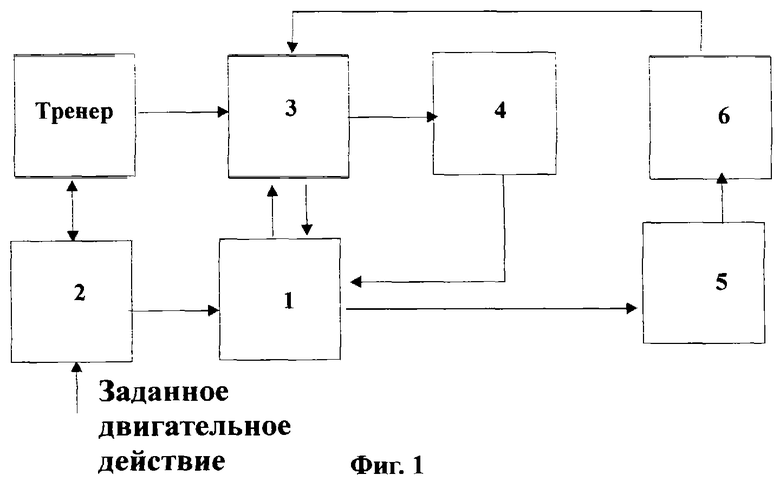
на фиг.1 - мнемосхема поясняющая реализацию устройства безынерционного задания переменного сопротивления или облегчения в тренировочном процессе спортсменов;
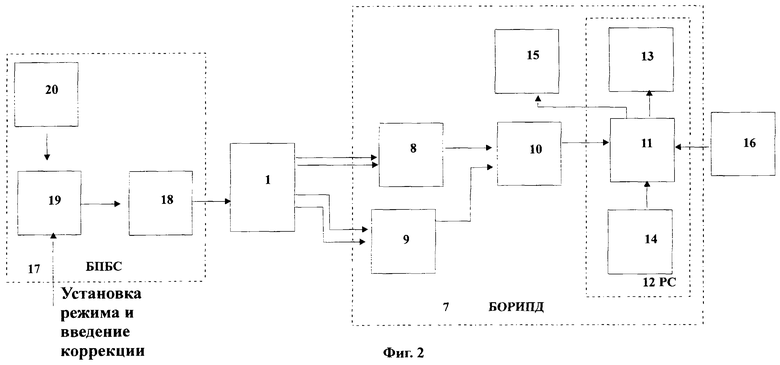
на фиг.2 - обобщенная блок- схема устройства;
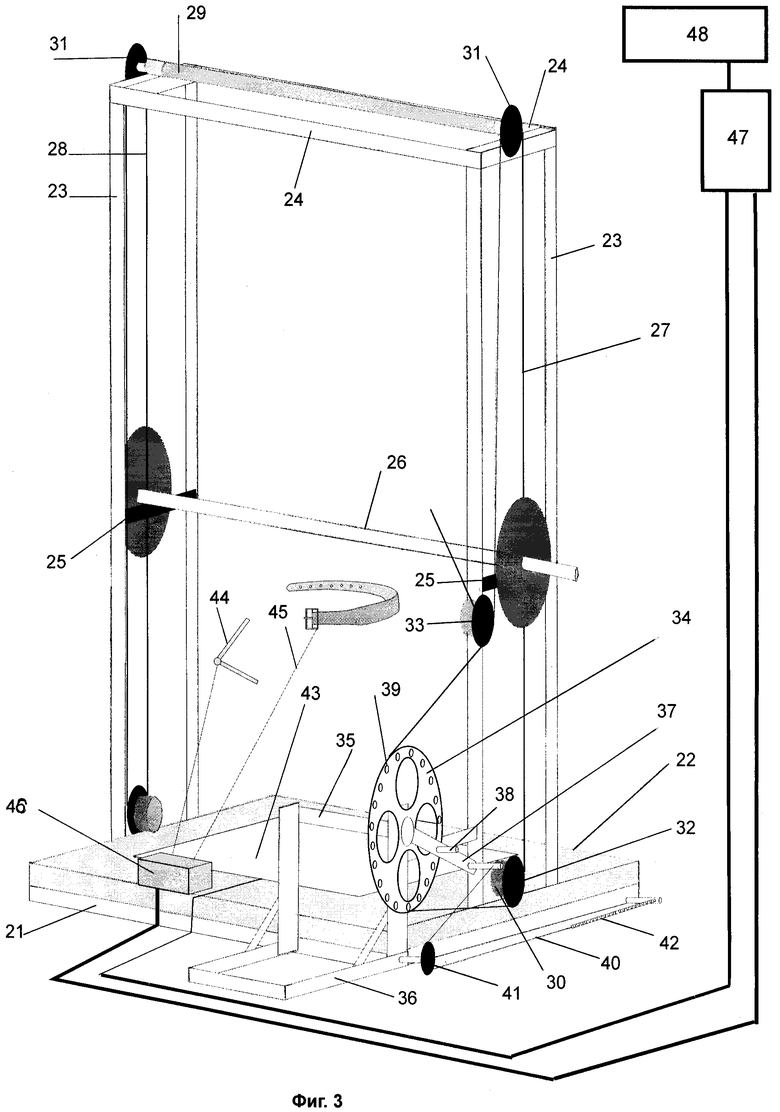
на фиг.3 - общий вид устройства;
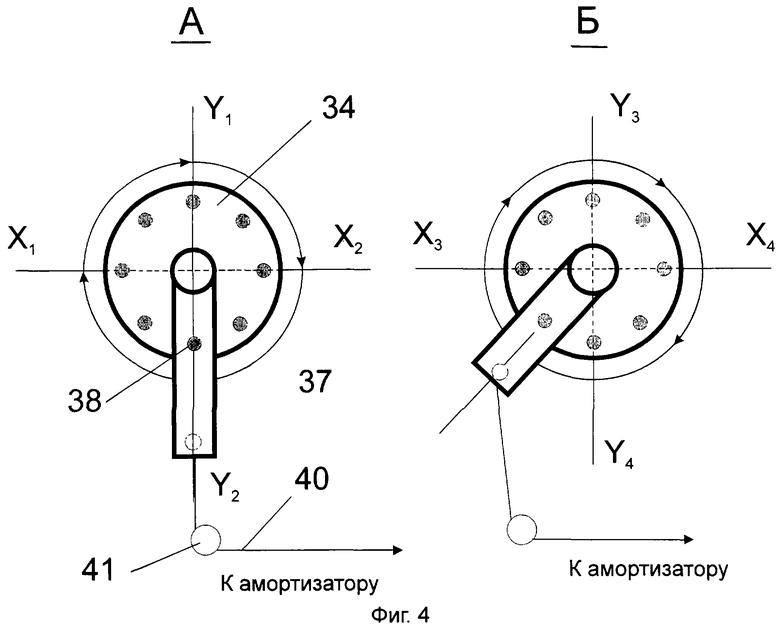
на фиг.4 - схема режимозадающего узла.
Устройство (фиг.2) содержит два блока. В первом блоке 7 обработки и регистрации информации о параметрах движения датчики силы 8 и датчики перемещения 9 подключены через аналого-цифровой преобразователь 10 к системному блоку 11 персонального компьютера 12, в состав которого входит дисплей 13, подключенный к системному блоку 11, клавиатура 14 и печатающее устройство 15, и управляется персональный компьютер 12 с помощью пакета прикладных программ. Второй блок 17 переменного безынерционного сопротивления содержит воздействующий элемент 18, который может быть любым, только чтобы через него передавалось воздействие на мышцы спортсмена 1, которое формируется и корректируется режимозадающим узлом 19, связанным также с безынерционным силовым средством 20.
Работает устройство следующим образом.
Заданное двигательное действие сначала осознается и осмысливается тренером и спортсменом, чтобы понять, как его выполнить, что соответствует блоку 2 на мнемосхеме фиг.1.
Далее, на основе этой информации определяется индивидуальный режим 3 воздействия на мышцы спортсмена 1, учитывающий особенности проявления биомеханических характеристик данного двигательного действия.
Затем тренер или сам спортсмен устанавливает требуемые моменты 4 возрастания или убывания сопротивления или облегчения. Непосредственно на самом устройстве это осуществляется с помощью режимозадающего узла 19 (фиг.2) блока переменного безынерционного сопротивления и облегчения 17. Режимозадающий узел 19 доводит через воздействующий элемент 18 энергию безынерционного силового средства 20 к мышцам спортсмена 1 при выполнении им заданного двигательного действия.
Перед тем как начать выполнять заданное двигательное действие спортсмен 1 либо становится на датчики силы 8 либо закрепляет их на туловище и прикрепляет на соответствующие суставы датчики перемещения 9, например гониометры, блока обработки, регистрации информации двигательных параметров 7 и после этого выполняет заданное двигательное действие. Измеренные параметры его записываются в память системного блока 11 персонального компьютера 12. Это осуществляется следующим образом. Полученные датчиками силы 8 и датчиками перемещения 9 данные через аналого-цифровой преобразователь 10 подаются в системный блок 11 персонального компьютера 12, обрабатываются под управлением прикладных программ 16 и подаются на дисплей 13 и печатающее устройство 15 с помощью клавиатуры 14. Выведенная на дисплей 13 информация в графическом и/или цифровом виде анализируется, что соответствует блоку 6 мнемосхемы (фиг.1) и по результатам данных эксперсс-анализа вводится корректировка, если она необходима. Непосредственно на устройстве (фиг.2) делают соответствующие изменения в режимо-задающем узле 19, итерационно приближаясь по параметрам к заданному двигательному действию.
Устройство, позволяющее формировать заданное воздействие, показано схематично на фиг.3 Оно состоит из двух самостоятельных блоков: блока переменного безынерционного сопротивления и блока обработки и регистрации информации о параметрах движения.
Блок переменного безынерционного сопротивления содержит основание 21, в которое встроен помост 22 и на котором установлены и закреплены две П-образные стойки 23, жестко соединенные между собой двумя перекладинами 24 в верхней части П-образных стоек 23, на каждой из стоек имеется держатель 25 для штанги 26, дискретно переставляемый и закрепляемый на стойке 23 с помощью кронштейнов (на фиг.3 не показаны), а также из двух цепей 27 и 28 одними концами прикрепленных к облегченному или нормальному грифу штанги 26 сверху, а другими концами - снизу и перекинутые через две пары вращающихся на валу 29 и осях 30 звездочек 31 и 32, первая пара 31 которых закреплена на валу 29, установленному с помощью втулок с подшипниками (на фиг.3 не показаны) на верхних перекладинах упомянутых П-образных стоек 23, а вторая пара звездочек 32 - на двух осях 30, установленных с помощью втулок с подшипниками на основании 21, при этом цепь 27 огибает пятую звездочку 33, аналогичную звездочкам 31 и 32 и закрепленную подвижно в вертикальной плоскости на П-образной стойке 23, в средней ее части, с возможностью стопорения, а также звездочку большего диаметра 34, ось 35 которой закреплена на опоре 36, установленной на основании 21, и на которой подвижно насажен рычаг 37, фиксируемый с помощью подпружиненного пальца 38 на звездочке большого диаметра 34 под разными углами, для чего на ней предусмотрены соответствующие отверстия 39, к рычагу 37 через нерастяжимую нить 40 и подвижный блочок 41 присоединен амортизатор 42, выполненный в виде пружины. Звездочка большого диаметра 34 и рычаг 37 укреплены на оси 35 консольно, то есть с одной стороны, на опоре 36, а силовое средство 42 выполнено из амортизатора (пружина металлическая, резина), один конец которого соединен скользяще-вращательно со свободным концом рычага 37, а второй конец амортизатора 42 закреплен на основании 21.
Второй блок-блок обработки, регистрации информации о параметрах движения 7 (фиг.2) предметно состоит (фиг.3) из узла измерения параметров двигательного действия, содержащего тензометрические датчики, входящие в состав тензометрической платформы 43, встроенной в помост 22, и датчиков угловых изменений 44 (гониометры) линейного перемещения 45 и входят в блок 46, подключенный через аналого-цифровой преобразователь 47 к персональному компьютеру 48.
Работает устройство следующим образом.
Рассмотрим в начале работу режимозадающего узла 19 (фиг.2), предметно реализованного (фиг.3) консольно закрепленным на оси 35 на опоре 36 звездочки большого диаметра 34 и рычага 37, фиксируемого на звездочке большого диаметра 34 с помощью подпружиненного пальца 38, и связанного с рычагом 37 амортизатора 42, являющимся безынерционным силовым средством 20 (фиг.2), посредством нерастяжимой нити 40 и подвижного блочка 41 (фиг.3).
Выберем упражнение “прыжок вверх с места”. С помощью натяжной звездочки 33 натянуть цепь 27 до оптимальной величины. Затем гриф штанги 26 установить в положение, соответствующее окончанию фазы амортизации в прыжке вверх. После этого рычаг 37 устанавливается в положение, соответствующее реализации требуемого режима.
Величину возрастания или убывания сопротивления и облегчения можно определить, используя метод динамометрии (динамометрическая платформа). Спортсмен принимает различные положения со штангой 26 на тренажере, стоя на динамометрической платформе 43, показания которой в это время регистрируются и воспроизводятся персональным компьютером 48 (фиг 3).
Создание того или иного режима возрастания или убывания сопротивления или облегчения зависит от положения рычага в начале выполнения двигательного действия, направления и амплитуды его вращения.
На фиг.3 видно, что при движении штанги 26 вверх рычаг 37 вращается по ходу часовой стрелки (вид сзади). При этом направлении вращения рычага получаем режимы возрастания и убывания сопротивления и облегчения (фиг.4А): возрастающее сопротивление - рычаг 37 вращается (по часовой стрелке) от оси У2 до оси X1; убывающее сопротивление - рычаг 37 вращается от оси X1 до оси У1; возрастающее облегчение - рычаг 37 вращается от оси У1 до оси Х2; убывающее облегчение - рычаг 37 вращается от оси Х2 до оси У2, постоянное сопротивление (сопротивление штанги) - рычаг 37 не связан со звездочкой большого диаметра 34, возрастающее сопротивление с переходом на убывающее - рычаг 37 из зоны вращения между осями У4 и Х3 переходит в зону вращения между осями Х3 и У3 (см. фиг.4Б), убывающее сопротивление с переходом на возрастающее облегчение - рычаг 37 из зоны вращения между осями Х3 и У3 переходит в зону вращения между осями У3 и Х4; возрастающее облегчение с переходом на убывающее облегчение - рычаг 37 из зоны вращения между осями У3 и Х4 переходит в зону вращения между осями Х4 и У4; убывающее облегчение с переходом на возрастающее сопротивление - рычаг 37 из вращения между осями У4 и Х4 переходит в зону вращения между осями У4 и Х3.
Градиентом изменения сопротивления или облегчения является плечо тяги амортизатора, которое равняется перпедикуляру, опущенному из оси вращения рычага на направления действия тяги.
Число сопряжении режимов сопротивления и облегчения зависит от амплитуды движения штанги 26 и размера звездочки большого диаметра 34.
Вернемся к выполнению выбранного упражнения - прыжок вверх с места. Рассмотрим принцип выполнения упражнения на блоке переменного безынерционного сопротивления 17 (фиг.2). Допустим, что необходимо, чтобы фаза “полуприсед” (амортизация) во время прыжка выполнялся в режиме возрастающего сопротивления, а фаза “отталкивания” - в режиме убывающего сопротивления. Для этого надо расположить рычаг 37 (фиг.3) в верхнем вертикальном положении относительно оси вращения или чуть левее в тот момент, когда спортсмен 1 установил штангу 26 на плечах и стоит в выпрямленном положении. При выполнении полуприседа из такого положения звездочка большого диаметра 34 (вместе с рычагом 37) поворачивается с помощью штанги 26 и цепи 27 против часовой стрелки.
При вращении рычага 37 влево (до горизонтального положения) происходит увеличение плеча силы тяги амортизатора и по окончании фазы “полуприсед” спортсмен 1 испытывает наибольший момент сопротивления. Во время обратного действия, т.е. при выполнении фазы “отталкивание”, плечо сильно уменьшается (до вертикального положения рычага 37).
Верхнее вертикальное положение рычага 37 соответствует выпрямляемому положению теле спортсмена 1 в конце фазы “отталкивание”. В этот момент сопротивление блока переменного безынерционного сопротивления (фиг.2) равно нулю. Дальнейшее перемещение тела, связанное с фазой “полет”, сопровождается облегчением движения в возрастающем режиме (если рычаг 37 (фиг.3) при этом не переходит правую часть горизонтальной оси).
Наибольший момент сопротивления блока переменного безынерционного сопротивления 17 (фиг.2), создающийся в конце фазы “полуприсед” (амортизация), способствует проявлению максимального напряжения мышц. Напряженная мышца сокращается с большей скоростью в фазе “отталкивание” в условиях преодоления уменьшающегося сопротивления. Такой режим работы мышц больше всего соответствует естественному баллистическому характеру проявления силы.
По такому же принципу можно использовать данный блок 17 устройства при выполнении тяжелоатлетических упражнений.
Второй блок - блок обработки, регистрации информации о двигательных параметрах движения 7 (фиг.2) функционирует следующим образом. Перед выполнением упражнения свободный конец нити, идущей от датчика перемещения 45, прикрепляется к грифу штанги 26 (фиг.3) или к поясу 46 спортсмена 1. Затем спортсмен, закрепив на коленном суставе гониометрический датчик 44, становится на динамометрическую платформу 43 и выполняет упражнение с использованием блока переменного безынерционного сопротивления 17 (фиг.2) или без него.
Электрические аналоговые сигналы с динамометрической платформы 43 (фиг.3), гониометрического датчика 44 и датчика перемещения 45 подаются на вход анало-цифрового преобразователя, где они преобразуются в цифровые коды, которые поступают в память системного блока 11 (фиг.2) персонального компьютера 12 для последующей обработки с помощью комплекса программ 16.
В комплекс автоматизированной обработки информации входят следующие программы: ввод регистрируемых параметров; предварительная обработка сигналов (сглаживание); тарировка входных параметров; вывод графического изображения входных параметров; математическая обработка параметров выполняемых упражнений (прыжок вверх, с места, толкание ядра с места, рывок, подъем штанги на грудь и от груди и др.), сервисные.
Программа математической обработки параметров спортивного упражнения позволяет выполнять расчет длительности всего движения и отдельных фаз и периодов, величины угловых изменений в суставах; величины перемещения и скорости движения штанги или тела спортсмена; силы реакции опоры по пиковым значениям; импульса силы реакции опоры всего движения и отдельных его фаз и периодов; движущего импульса силы реакции опоры всего движения и отдельных его фаз и периодов.
Таким образом, заявляемый способ и устройство позволяют задавать безынерционное управляемое сопротивление мышцам и получать информацию о параметрах двигательных действий, оказывая тем самым на спортсмена управляющее воздействие.
Очевидно, что для тяжелоатлета понадобятся значительные моменты силы, поэтому в устройстве для него придется безынерционное силовое средство выполнить из n-ного количества амортизаторов, чтобы расширить силовые параметры устройства.
Практический опыт применения заявляемого устройства показывает, что иногда наблюдается провисание амортизатора, которое мешает тренировочному процессу, поэтому необходимо ввести в устройство узел выбора провисания и настройки амортизатора. Это позволит устранить влияние этих факторов на тренировочный процесс.
Наконец, можно совместить узел выбора провисания амортизатора и его настройки, разместив амортизатор в трубе, установленной на основании, и свободный конец амортизатора подсоединен к рычагу через подвижный блочек, установленный на том же основании, а второй конец амортизатора подсоединен к узлу выбора провисания и настройки амортизатора.
По сравнению с прототипом предлагаемый способ безынерционного задания переменных сопротивления или облегчения в тренировочном процессе спортсменов и устройство, его реализующее, обладает тем качеством, что не нужно учитывать инерционные свойства силового средства, что весьма важно для тренировочного процесса, особенно в тяжелой атлетике. Возможность регистрировать, запоминать и выдавать по запросу зарегистрированные двигательные действия в реальном масштабе времени практически по завершению выполнения движения и выдавать необходимые рекомендации для устранения ошибок позволяет прослеживать и корректировать тренировочный процесс в статике и динамике, способствуя эффективности тренировок и повышению мастерства спортсменов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ-ГИРЕВИКОВ | 2002 |
|
RU2242261C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ АЛЬПИНИСТОВ | 2002 |
|
RU2245732C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2004 |
|
RU2313379C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2557520C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНОГО ДЕЙСТВИЯ ГИРЕВИКА | 2004 |
|
RU2291731C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| УСТРОЙСТВО ДЛЯ РАЗВИТИЯ ПРЫЖКОВОЙ СИЛЫ СПОРТСМЕНОВ | 2001 |
|
RU2201781C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ПЛОВЦОВ | 2014 |
|
RU2568865C1 |
Устройство безынерционного задания переменного сопротивления или облегчения выполнения двигательного действия в тренировочном процессе спортсменов, содержит блок переменного сопротивления и блок регистрации и информации о параметрах движения, первый из которых состоит из основания, в которое встроен помост и на котором установлены и закреплены две П-образные стойки, жестко соединенные между собой двумя перекладинами в верхней части П-образных стоек, на каждой из этих стоек имеется держатель для штанги, дискретно переставляемый и закрепляемый на стойке с помощью кронштейнов, а также из двух цепей, одними концами прикрепленных к грифу штанги сверху, а другими концами - снизу и перекинутых через две пары вращающихся на двух осях и валу звездочек, первая пара которых закреплена на валу, установленном с помощью втулок с подшипниками на верхних перекладинах упомянутых П-образных стоек, а вторая пара звездочек - на двух осях, установленных с помощью втулок с подшипниками на основании, при этом одна из цепей огибает пятую звездочку, аналогичную указанным четырем и закрепленную подвижно в вертикальной плоскости на П-образной стойке, в ее средней части, с возможностью стопорения, а также звездочку, ось которой закреплена на опоре, установленной на упомянутом основании, и на которой подвижно насажен рычаг, фиксируемый с помощью подпружиненного пальца на звездочке, ось которой закреплена на опоре, под разными углами, для чего на ней предусмотрены соответствующие отверстия, а второй блок - блок обработки, регистрации информации о параметрах движения, состоит из узла измерения параметров двигательного действия, содержащего тензометрические датчики, входящие в состав тензометрической платформы, встроенной в упомянутый помост, и датчики линейного перемещения и угловых изменений, подключенные через аналого-цифровой преобразователь к персональному компьютеру, ось, на которой подвижно закреплена звездочка на опоре и подвижно насажен рычаг, закреплена консольно на упомянутой опоре, а силовое средство выполнено в виде амортизатора, один конец которого соединен скользяще-вращательно со свободным концом упомянутого рычага, а второй конец амортизатора закреплен на основании. Использование данного изобретения позволяет освободиться от грузовой массы и ее влияния на двигательные действия. 3 з.п. ф-лы, 4 ил.
| ЧЕРКЕСОВ Ю.Т | |||
| Машины управляющего воздействия и спорт | |||
| Министерство науки и образования республики Адыгея, 1993, с.60-75.SU 1200915 А, 30.12.1985.US 5250013 А, 05.10.1993.US 5372556 А, 13.12.1994. |

