Изобретение относится к способу наклейки этикеток на бутылки или на подобные им сосуды, а также к этикетировочной машине для осуществления данного способа.
Известны, в частности, бутылки или подобные им сосуды, имеющие типичные для сосудов признаки формообразования, к примеру типичные геометрические признаки на своей наружной поверхности, такие, к примеру, как термосваренные поверхности, орнаменты, тиснения, рельефные выступы и т.д. При этикетировании таких сосудов необходимо наносить соответствующие этикетки с высокой точностью наложения относительно такого рода типичных для сосудов формообразующих признаков, а именно с максимально малыми допусками, к примеру в диапазоне +/-0,5 мм и при обычной на сегодняшний день высокой производительности этикетировочных машин, которая, к примеру, может составлять до 60.000 этикетированных сосудов в час.
Уже известны способы, при которых сосуды, которые подводятся к держателям для бутылок приводимого во вращательное движение вокруг вертикальной оси машины ротора этикетировочной машины с произвольной ориентацией относительно их типичных формообразующих признаков, перед этикетированием выравниваются посредством регулируемого вращения держателей для сосудов, так что затем при прохождении этикетировочной станции наклейка этикеток может производиться на выровненные сосуды. Выравнивание сосудов посредством вращения держателей для сосудов происходит, к примеру, с использованием управляющих сигналов системы распознавания изображения и обработки данных, которая, в частности, включает в себя систему камер, по меньшей мере, с одной электронной камерой и одним подходящим осветительным устройством, вычислительную машину, а также программное обеспечение обработки изображения и распознавания изображения.
Посредством системы камер учитываются характерные зоны, или контрольные зоны, или контрольные кромки соответствующего типичного для сосуда формообразующего признака и посредством сравнения изображений, то есть посредством сравнения фактического значения и заданного значения, определяется необходимый для выравнивания угол поворота держателя для сосудов и последний вращается вокруг данного угла поворота. Типичными для сосудов формообразующими признаками являются при этом, к примеру, форма соответствующего сосуда и/или геометрический, типичный для сосуда признак на наружной поверхности сосуда, такой, к примеру, как термосваренные поверхности, орнаменты, тиснения, рельефные выступы и т.д.
Количество необходимых для системы камер зависит, в частности, от свойств обрабатываемых сосудов (к примеру, материал, прозрачность или непрозрачность, цвет, поверхность или структура поверхности, заполнение и т.д.).
С помощью данного известного способа возможно выравнивание сосудов по их формообразующим признакам перед последующим этикетированием, но полученная таким образом точность позиционирования этикеток относительно типичных для сосудов формообразующих признаков ограничена узкими рамками, так что достижимая точность часто не отвечает более требованиям сегодняшнего дня. В частности, при концентричном нанесении этикеток, к примеру, внутри термосваренного клейма или термосваренной поверхности внешне даже самые малые отклонения сильно бросаются в глаза и воспринимаются как серьезный недостаток.
Причины таких отклонений многообразны, а именно, в частности:
допуски внутри сосудов, которые возникли, к примеру, в процессе изготовления сосудов;
этикетируемый сосуд при выравнивании лишь частично следует за вращательным движением держателя для сосудов, и именно из-за проскальзывания между держателем для сосудов и сосудом, в частности, вследствие загрязнения и/или влажности на сосуде и/или на держателе для сосудов, так что при выравнивании выявляются отклонения от заданного положения.
Последнее проблематично, в частности, и потому, что для выравнивания, как правило, имеется в распоряжении лишь сравнительно небольшой угол вращательного движения ротора и, таким образом, в частности, при высокой производительности, лишь очень небольшой промежуток времени, так что выравнивание должно производиться с относительно высокими вращательными или угловыми ускорениями.
Техническим результатом данного изобретения является получение высокоточной наклейки этикеток на бутылки, консервные банки или подобного рода сосуды, относительно типичных для сосудов формообразующих признаков, в частности относительно типичных геометрических признаков на поверхности сосудов.
Особенность способа в соответствии с изобретением состоит в том, что стартовый момент или момент передачи, в который происходит передача соответствующей этикетки на проходящие мимо этикетировочной станции сосуды, настраивается в зависимости от ориентации и/или фактического вида, то есть, к примеру, от размера и/или формы соответствующего типичного для сосуда формообразующего признака, а именно посредством соответствующей настройки этикетировочной станции и без выравнивающего или вращательного движения сосудов.
Настройка стартового момента или момента передачи происходит с использованием системы распознавания изображения или обработки данных, которая учитывает типичный для сосуда формообразующий признак каждого сосуда и посредством анализа или обработки соответствующего изображения таким образом инициирует настройку стартового момента или момента передачи, или этикетировочной станции, что этикетка передается затем на соответствующие сосуды с высокой точностью относительно своего типичного для сосуда формообразующего признака и наклеивается на эти сосуды.
Варианты осуществления изобретения являются предметом последующих зависимых пунктов формулы изобретения. Изобретение разъясняется далее более подробно на примере осуществления изобретения на основании чертежей, на которых представлено:
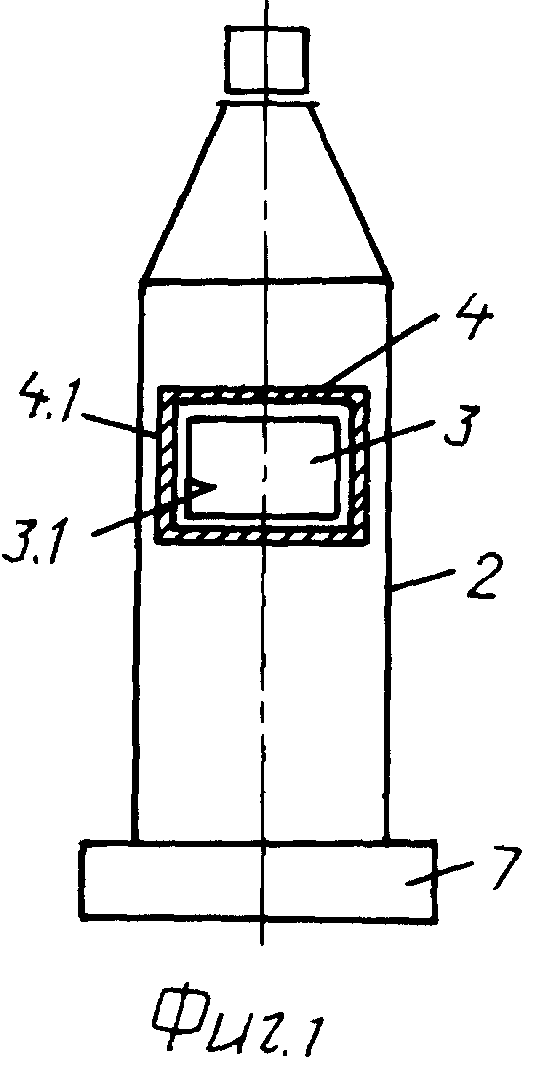
фиг.1 - в упрощенном изображении и на виде сбоку сосуд в форме бутылки с типичным геометрическим признаком на наружной поверхности, а именно с термосваренной поверхностью;
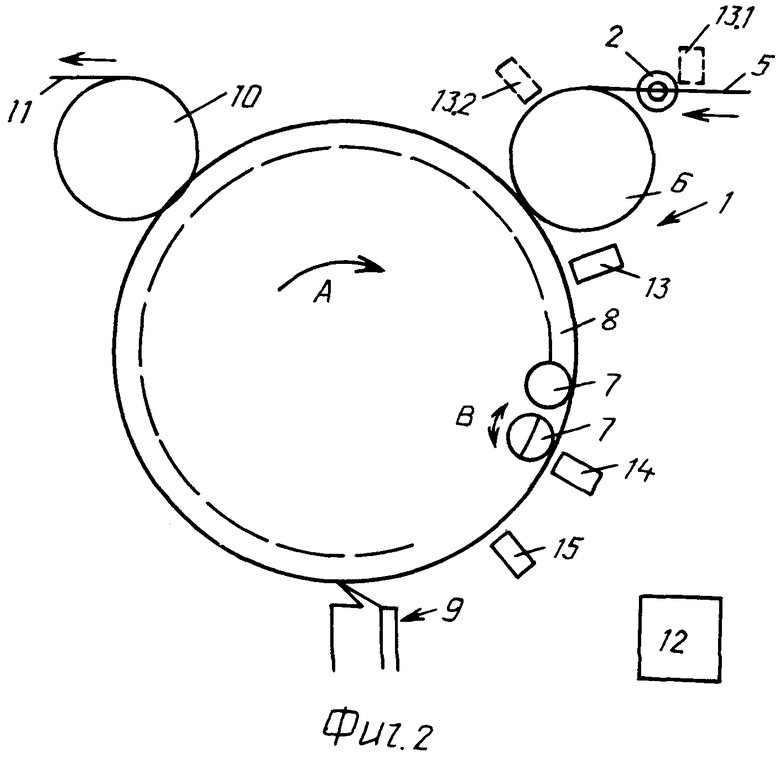
фиг.2 - в упрощенном изображении и на виде сверху этикетировочная машина вращающегося конструктивного типа для этикетирования бутылок в зоне их наружной поверхности, снабженной типичным геометрическим признаком.
Обозначенная на фиг.2 в общем и целом позицией 1 этикетировочная машина вращающегося конструктивного типа предназначена для этикетирования бутылок 2, то есть для наклейки этикеток 3 на периферийную поверхность бутылок 2 с максимально точным выравниванием относительно типичного или характерного геометрического признака 4, который предусмотрен на наружной поверхности бутылки 2. В представленном варианте осуществления изобретения этим геометрическим признаком 4 является термосваренная поверхность, на которой соответствующая этикетка 3 должна находиться точно по середине.
Геометрический признак 4, относительно которого с высокой точностью должна производиться наклейка этикеток 3, может иметь и другое исполнение, к примеру, в форме орнамента, тиснения, рельефного выступа на наружной поверхности и т.д.
Предназначенные для этикетирования бутылки 2 подводятся к этикетировочной машине 1 в вертикальном положении, то есть с ориентацией осями бутылок или сосудов в вертикальном направлении, посредством транспортера 5, в виде одноручейного потока бутылок, и попадают затем через подающую звездочку 6, служащую в качестве входа для бутылок или сосудов, соответственно, на держатель 7 для бутылок или сосудов, который совместно с большим количеством однородных держателей для сосудов предусмотрен по периметру приводимого во вращательное движение вокруг вертикальной оси машины ротора 8 (стрелка А).
Каждая бутылка 2 на своем держателе 7 для бутылок посредством вращения этого держателя для бутылок вокруг вертикальной оси держателя для бутылок (двойные стрелки В на фиг.2) точно выравнивается относительно геометрического признака 4 и, таким образом, посредством вращающегося ротора 8 продвигается мимо этикетировочной станции 9, на которой соответствующая этикетка 3 передней кромкой 3.1 передается на продвигающуюся мимо этикетировочной станции 9 бутылку, и именно таким образом, что соответствующая этикетка 3 после окончательного прижима к бутылке 2 имеет желаемое позиционирование с высокой точностью относительно геометрического признака 4, то есть соответствующая этикетка 3 располагается, к примеру, по середине образующей геометрический признак, рельефной или обрамленной утолщенным краем термосваренной поверхности. Этикетировочная станция 9 в представленном примере осуществления изобретения образована для обработки самоклеящихся этикеток 3. Использование других этикетировочных станций или агрегатов, к примеру, для нанесения этикеток 3 с использованием клея, также применимо при данном изобретении.
Этикетированные бутылки 2 посредством ротора 8 и через образующую выход для бутылок или сосудов подающую звездочку 10 попадают на транспортер 11 и по нему подводятся для последующего использования, к примеру, к упаковочной машине. Держателями 7 для бутылок являются, к примеру, диски для бутылок, на которые бутылки 2 устанавливаются своим днищем. Возможны также и другие варианты осуществления держателей 7 для бутылок, к примеру, в той форме, когда бутылки 2 удерживаются на этих держателях 7 для бутылок, соответственно, в подвешенном состоянии.
Для выравнивания бутылок 2, которые проводятся по транспортеру 5 с произвольной ориентацией относительно своих геометрических признаков 4, отдельные держатели 7 для бутылок снабжены, соответственно, своим собственным регулируемым сервоприводом или приводом механизма поворота, посредством которого осуществляется управляемое вращательное движение вокруг вертикальной оси транспортирующих держателей, в соответствии с двойной стрелкой В. Отдельные приводные механизмы держателей 7 для бутылок управляются посредством центрального устройства 12 управления (центральной вычислительной машины), и именно в зависимости от сигналов тройной системы камер, которая, соответственно, схематично обозначена посредством видеокамер 13, 14 и 15.
Камеры 13-15 предусмотрены, соответственно, по траектории движения установленных на держателях 7 бутылок 2, вблизи периметра ротора 8, но не перемещаются совместно с ним, между подающей звездочкой 5 и этикетировочной станцией 9. Камеры 13-15 ориентированы далее таким образом, что ими в любом случае учитывается имеющая типичный геометрический признак 4 зона каждой проходящей мимо бутылки 2. Камеры 13-15 являются далее составной частью системы обработки изображении и распознавания, которая состоит, в частности, из соответствующих камер 13-15, соответствующего осветительного устройства, из вычислительной машины, которая является, к примеру, центральным устройством управления или центральной вычислительной машиной 12, а также из инсталлированного на этой вычислительной машине программного обеспечения обработки изображения и распознавания изображения.
Каждая переданная с транспортирующей звездочки 5 на один из держателей 7 бутылка 2 проходит сначала камеру 13. Посредством данной камеры или посредством включающей в себя эту камеру 13 системы распознавания изображения и обработки данных определяется фактическое положение типичного геометрического признака 4 проходящей мимо бутылки 2, а затем устройством 12 управления вызывается управляющий сигнал для настройки соответствующего держателя для бутылок, и именно таким образом, что соответствующая бутылка 2 предпочтительно посредством кратчайшего поворота приводится в заданное положение или в положение заданной ориентации, и притом с максимально высокой точностью. По меньшей мере, предварительно ориентированные, таким образом, относительно своих типичных геометрических признаков 4, то есть, к примеру, ориентированные радиально наружу относительно вертикальной оси ротора или машины, бутылки 2 проходят затем камеру 14, посредством которой еще раз определяется фактическая ориентация типичного геометрического признака 4, так что затем может производиться дальнейшее выравнивание (точное выравнивание) каждой бутылки 2 посредством вращения соответствующего держателя 7 для бутылок, то есть посредством регулируемого активирования соответствующего сервопривода. Угол открытия оптики камеры 14 выбран при этом предпочтительно таким образом, что посредством данной камеру в отличие от камеры 13 учитывается, соответственно, не вся бутылка 2 или большая часть наружной поверхности бутылки 2, а, в основном, только лишь типичный геометрический признак 4 каждой бутылки 2 в зоне использованного для выравнивания видимого элемента, к примеру, опережающего относительно направления А вращения ротора 8 края 4.1 геометрического признака 4. Посредством включающей в себя камеру 14 системы распознавания изображения и обработки данных определяется также лишь положение геометрического признака каждой бутылки 2; сам признак или возможные отклонения в отношении образования данного признака, к примеру отклонения от формы и/или размера, не учитываются включающими в себя камеры 13 и 14 системами распознавания изображения и обработки данных.
С помощью камеры 15 дополнительно к ориентации типичного геометрического признака 4 каждой проходящей мимо бутылки 2 учитывается также и фактический вид, то есть, к примеру, форма и/или размер этого признака. На основании полученного с этой камеры изображения в системе распознавания изображения и обработки данных, включающей в себя камеру 15, этот фактический вид соответствующего признака 4 анализируется или обмеряется, и, к примеру, посредством сравнения с соответствующим, заложенным в системе, то есть в устройстве 12 управления, значением (фактическое значение) на этикетировочной станции 9, время передачи соответствующей этикетки 3 на соответствующую проходящую мимо бутылку 2 настраивается таким образом, что этикетка 3 после нанесении, несмотря на отклонения соответствующего геометрического признака 4, к примеру, по форме и/или размеру, несмотря на не оптимальное выравнивание и т.д., оптически выровнена максимально точно относительно признака 4, то есть при выполненном в виде термосваренной поверхности геометрическом признаке 4 нанесена точно по середине на термосваренную поверхность. Такая настройка момента времени передачи соответствующей этикетки 3 производится без поворота держателя 7 для бутылок. При этом понимается, однако, что момент передача или стартовый момент для передачи соответствующей этикетки 3 на бутылку 2 определяется также с учетом актуальной скорости вращения ротора 8.
Изобретение описывалось ранее на примере осуществления. При этом понимается, что возможны изменения, а также вариации. Так, например, возможно предусмотреть камеру 13 уже в зоне входа для сосудов или бутылок этикетировочной машины 1, как это обозначено на фиг.2 позицией 13.1 или 13.2, и притом, к примеру, в положении транспортера 5 в направлении транспортировки перед подающей звездочкой 6 (камера 13.1), если посредством соответствующих мер, к примеру посредством применения зажимных устройств или зажимных пальцев гарантировано, что бутылки 2 после прохождения камеры 13.1 не смогут более произвольно вращаться вокруг своей вертикальной оси. По логике камера 13 может быть предусмотрена в зоне подающей звездочки 6 и, как обозначено позицией 13.2, если, по меньшей мере, на подающей звездочке 6 посредством соответствующих мер, к примеру посредством использования зажимного пальца и т.д., предотвращено произвольное вращение бутылок 2 вокруг своей вертикальной оси.
Далее, в частности, также имеется возможность, например, при обработке бутылок с особо просто распознаваемой геометрией производить точное выравнивание, как оно описано выше в связи с камерой 14 и с соответствующей системой распознавания изображения и обработки данных, и настройку момента передачи или стартового момента для передачи этикеток, в зависимости от учтенной фактической ориентации или вида соответствующего геометрического признака 4 при использовании общей камеры, к примеру, камеры 14. При таком способе действия необходимость, к примеру, в камере 15 отпадала бы. Полученное камерой 14 изображение используется затем сначала для точного выравнивания, а затем также и для настройки момента передачи соответствующей этикетки 3. Этот вариант осуществления имеет, в частности, преимущество в том, что в отсутствие одной камеры угол поворота между используемой для точного выравнивания и для определения момента передачи этикетки камерой и этикетировочной станцией 9 увеличивается, так что, в частности, время, имеющееся в распоряжении для осуществления точного выравнивания, увеличивается. Таким образом, и при высокой производительности этикетировочной машины 1 (количество этикетированных в единицу времени бутылок 2), и при высоком числе оборотов ротора 8 ускорения (ускорения вращения) при повороте или выравнивании держателей 7 для бутылок они снижаются настолько, что при точном выравнивании предотвращается обусловленное инерцией бутылок 2 проскальзывание между соответствующим держателем 7 для бутылок и предусмотренной на нем бутылкой 2.
Изобретение было пояснено выше на базе этикетировочной машины 1 для этикетирования бутылок 2. Само собой разумеется, что вышеописанным способом могут этикетироваться и другие сосуды, к примеру консервные банки.
ОБОЗНАЧЕНИЯ
Изобретение относится к способу точно позиционированной наклейки этикеток на бутылки, консервные банки или подобного рода сосуды, а также к этикетировочной машине. Способ наклейки осуществляется относительно, по меньшей мере, одного типичного для сосуда формообразующего признака с использованием, по меньшей мере, одной системы распознавания изображения и переработки данных, снабженной, по меньшей мере, одной камерой. Посредством камеры учитывается типичный для сосуда формообразующий признак каждого сосуда, проходящего по транспортирующему элементу мимо камеры, и она подает сигнал, регулирующий процесс этикетирования. Посредством системы распознавания изображения и обработки данных учитывают ориентацию и/или фактический вид типичного для сосуда формообразующего признака на каждом сосуде и, исходя из этого, момент передачи этикеток на соответствующий сосуд настраивают с обеспечением оптимального позиционирования этикетки после наклейки относительно типичного для сосуда формообразующего признака. Предложенное изобретение обеспечивает получение высокоточной наклейки этикеток на сосуды, ориентируемой относительно формообразующих признаков. 2 н. и 25 з.п. ф-лы, 2 ил.
1. Способ точно позиционированной наклейки этикеток (3) на бутылки, консервные банки или подобного рода сосуды (2) относительно, по меньшей мере, одного типичного для сосуда формообразующего признака (4), с использованием, по меньшей мере, одной системы распознавания изображения и переработки данных, снабженной, по меньшей мере, одной камерой (15), посредством которой учитывается типичный для сосуда формообразующий признак (4) каждого сосуда (2), проходящего по транспортирующему элементу (8) мимо камеры, и которая подает сигнал, регулирующий процесс этикетирования, отличающийся тем, что посредством системы (4, 15) распознавания изображения и обработки данных учитывают ориентацию и/или фактический вид типичного для сосуда формообразующего признака (4) на каждом сосуде (2) и, исходя из этого, момент передачи этикеток (3) на соответствующий сосуд (2) настраивают с обеспечением оптимального позиционирования этикетки после наклейки относительно типичного для сосуда формообразующего признака (4).
2. Способ по п.1, отличающийся тем, что момент передачи или стартовый момент для передачи соответствующей этикетки (3) на сосуд (2) настраивают в зависимости от скорости транспортирующего элемента (8).
3. Способ по п.1 или 2, отличающийся тем, что посредством системы распознавания изображения и обработки данных для настройки момента передачи или стартового момента определяют фактическую форму соответствующего типичного для сосуда формообразующего признака (4), например, расстояние, по меньшей мере, от двух контрольных зон или контрольных кромок формообразующего признака.
4. Способ по п.3, отличающийся тем, что определяют расстояние, по меньшей мере, двух контрольных зон или контрольных кромок, следующих в направлении (А) движения друг за другом, причем сосуды (2) проводятся мимо, по меньшей мере, одной камеры (15).
5. Способ по п.1, отличающийся тем, что сосуды (2) перед учетом посредством, по меньшей мере, одной камеры (15) системы распознавания изображения и обработки данных выравнивают регулирующей момент передачи этикеток с заданной ориентацией относительно их типичного для сосуда формообразующего признака (4).
6. Способ по п.5, отличающийся тем, что выравнивание сосудов (2) производят посредством регулируемого вращения сосудов (2) вокруг оси сосудов.
7. Способ по п.6, отличающийся тем, что сосуды (2) расположены соответственно на держателе (7) для сосудов, который для выравнивания выполнен с возможностью регулируемого вращения посредством привода вокруг оси сосуда.
8. Способ по п.1, отличающийся тем, что выравнивание сосудов (2) происходит соответственно посредством оптического учета, по меньшей мере, одной типичной для сосуда контрольной зоны, к примеру, по меньшей мере, одной типичной для сосуда контрольной кромки (4.1).
9. Способ по п.8, отличающийся тем, что выравнивание производят с использованием имеющей, по меньшей мере, одну камеру (13, 14) системы распознавания изображения и обработки данных.
10. Способ по п.1, отличающийся тем, что выравнивание сосудов производят, по меньшей мере, за два следующих по времени друг за другом этапа, а именно сначала грубое выравнивание каждого сосуда (2) посредством учета соответствующего фактического положения или фактической ориентации типичного для сосуда формообразующего признака, посредством сравнения этого фактического положения с заданным положением или с заданной ориентацией и посредством поворота сосуда в заданное положение, а также посредством последующего точного выравнивания снова посредством учета фактического положения или фактической ориентации типичного для сосуда формообразующего признака, посредством сравнения фактического положения с заданным положением или заданной ориентацией и посредством поворота сосуда (2) в заданное положение.
11. Способ по п.10, отличающийся тем, что грубое выравнивание и точное выравнивание производят с использованием системы распознавания изображения и обработки данных, по меньшей мере, с одной камерой (13, 14).
12. Способ по п.1, отличающийся тем, что используют общую вычислительную машину (12) для регулирующей момент передачи системы распознавания изображения и обработки данных, а также, по меньшей мере, для одной регулирующей выравнивание сосудов (2) системы распознавания изображения и обработки данных.
13. Способ по п.1, отличающийся тем, что используют общую камеру (14) для регулирующей момент передачи этикеток системы распознавания изображения и обработки данных, а также для регулирующей выравнивание, например, точное выравнивание сосудов (2) системы распознавания изображения и обработки данных.
14. Способ по п.1, отличающийся тем, что этикетки (3) выполнены самоклеящимися.
15. Способ по 1, отличающийся тем, что используют этикетировочную машину (1) вращающегося конструктивного типа с приводимым во вращательное движение вокруг вертикальной оси машины ротором (8), с большим количеством предусмотренных по периметру ротора держателей (7) для сосудов, на которых сосуды (2) продвигают мимо, по меньшей мере, одной камеры (13, 13.1, 13.2, 14, 15) и, по меньшей мере, одной этикетировочной станции (9).
16. Этикетировочная машина для точно позиционированной наклейки этикеток (3) на бутылки, консервные банки или подобного рода сосуды (2) относительно, по меньшей мере, одного типичного для сосуда формообразующего признака (4), по меньшей мере, с одной системой распознавания изображения и обработки данных, по меньшей мере, с одной камерой (15), посредством которой учитывается типичный для сосуда формообразующий признак (4) каждого проходящего по транспортирующему элементу (8) мимо камеры сосуда (2) и которая подает сигнал, регулирующий процесс этикетирования, и, по меньшей мере, с одной этикетировочной станцией (9) на траектории движения транспортирующего элемента (8), отличающаяся тем, что система (4, 15) распознавания изображения и обработки данных выполнена с возможностью учета ориентации и/или фактического вида типичного для сосуда формообразующего признака (4) на каждом сосуде и выработки регулирующего момента передачи соответствующей этикетки (3) на этикетировочной станции (9).
17. Этикетировочная машина по п.16, отличающаяся тем, что она выполнена с возможностью настройки момента передачи или стартового момента для передачи соответствующей этикетки (3) на сосуд в зависимости от скорости транспортирующего элемента (8).
18. Этикетировочная машина по п.16 или 17, отличающаяся тем, что система распознавания изображения и обработки данных для настройки момента передачи или стартового момента выполнена с возможностью определения фактической формы соответствующего типичного для сосуда формообразующего признака (4), например, расстояние, по меньшей мере, от двух контрольных зон или контрольных кромок формообразующего признака.
19. Этикетировочная машина по п.18, отличающаяся тем, что содержит расположенные на транспортирующем элементе (8) держатели (7) для сосудов, выполненные для выравнивания сосудов (2) с возможностью регулируемого вращения посредством привода вокруг оси сосудов.
20. Этикетировочная машина по п.16, отличающаяся тем, что содержит средства для выравнивания сосудов (2) посредством оптического учета, по меньшей мере, одной типичной для сосуда контрольной зоны, например, по меньшей мере, одной типичной для сосуда контрольной кромки (4.1).
21. Этикетировочная машина по п.20, отличающаяся тем, что содержит систему распознавания изображения и обработки данных для выравнивания сосудов (2) с, по меньшей мере, одной камерой (13, 14).
22. Этикетировочная машина по п.16, отличающаяся тем, что содержит средства для выравнивания сосудов, которые происходят, по меньшей мере, за два следующих по времени друг за другом этапа, а именно сначала грубое выравнивание каждого сосуда (2) посредством учета соответствующего фактического положения или фактической ориентации типичного для сосуда формообразующего признака, посредством сравнения этого фактического положения с заданным положением или заданной ориентацией и посредством поворота сосуда в заданное положение, а также посредством последующего точного выравнивания посредством учета фактического положения или фактической ориентации типичного для сосуда формообразующего признака, посредством сравнения фактического положения с заданным положением или заданной ориентацией и посредством поворота сосуда (2) в заданное положение.
23. Этикетировочная машина по п.22, отличающаяся тем, что средства для грубого выравнивания и точного выравнивания образованы соответственно посредством системы распознавания изображения и обработки данных соответственно, по меньшей мере, с одной камерой (13, 14).
24. Этикетировочная машина по п.16, отличающаяся тем, что снабжена общей вычислительной машины (12) для регулирующей момент передачи системы распознавания изображения и обработки данных, а также, по меньшей мере, для одной регулирующей выравнивание сосудов (2) системы распознавания изображения и обработки данных.
25. Этикетировочная машина по п.16, отличающаяся тем, что снабжена общей камерой (14) для регулирующей момент передачи этикеток системы распознавания изображения и обработки данных, а также для регулирующей выравнивание, например, точное выравнивание сосудов (2), системы распознавания изображения и обработки данных.
26. Этикетировочная машина по п.16, отличающаяся тем, что, по меньшей мере, одна этикетировочная станция (9) выполнена с возможностью обработки самоклеящихся этикеток (3).
27. Этикетировочная машина по п.16, отличающаяся тем, что она выполнена в виде этикетировочной машины вращающегося типа с приводимым во вращательное движение вокруг вертикальной оси машины ротором (8) и с большим количеством предусмотренных по периметру ротора держателей (7) для сосудов.
| DE 202005017180 U1, 05.01.2006 | |||
| DE 102004040164 A1, 02.03.2006 | |||
| DE 20203529 U1, 23.05.2002 | |||
| УПРАВЛЯЕМОЕ КОМПЬЮТЕРОМ ЭТИКЕТИРОВОЧНОЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ НАКЛЕЙКИ ЭТИКЕТОК (ВАРИАНТЫ) | 1994 |
|
RU2134651C1 |

