Изобретение относится к устройству для точного по положению выравнивания емкостей согласно ограничительной части пункта 1 формулы изобретения и к этикетировочной машине с таким устройством согласно ограничительной части пункта 23 формулы.
У емкостей и, в частности, бутылок, имеющих на своей внешней поверхности типичные геометрические признаки, например орнамент, тиснение, выпуклые надписи и т.д., требуется размещать этикетки с высокой точностью по отношению к этим признакам. Это значит, что у этикетировочной машины, к которой емкости подают, правда, стоя, однако с чистым случайным выравниванием или ориентацией, эти емкости необходимо сначала выровнять так, чтобы они имели по отношению к своим признакам как можно более точно заданную ориентацию. Лишь тогда, по меньшей мере, одна этикетка может быть размещена на соответствующей емкости, а затем прижата к ней валиком и/или щеткой.
Известно, что для такого выравнивания на роторе этикетировочной машины предусматривают подставки для емкостей, например в виде вращающихся тарелок, установленные с возможностью управляемого вращения посредством собственных сервоприводов вокруг вертикальной оси и, тем самым, вокруг оси соответствующей, расположенной на подставке емкости. Известно также управление подставками для емкостей для их выравнивания в зависимости от системы распознавания изображений или системы слежения, с помощью которой соответствующее положение или ориентацию, по меньшей мере, одного используемого для выравнивания типичного геометрического признака емкости регистрируют в качестве фактического значения, сравнивают его затем в электронном блоке с хранящимися там, представляющими заданное значение видеоданными или параметрами и на этой основе инициируют требуемое для необходимой корректировки положения управление сервоприводом подставки для емкости (EP 1205388). У одного варианта выполнения этого известного устройства система слежения содержит четыре камеры, последовательно установленные вдоль траектории движения подставок для емкостей в направлении вращения ротора. Каждая камера регистрирует при этом часть периферии емкости, а именно, регистрируя соответственно 100° этой периферии у вращающихся вокруг своих осей емкостей. На основе передаваемых камерой фактических видеоданных происходит затем корректировка положения вращения подставок для емкостей и выравнивание емкостей по отношению к их типичному геометрическому признаку.
Задачей изобретения является создание устройства, с помощью которого было бы возможным выравнивание емкостей с существенно более высокой точностью по отношению, по меньшей мере, к одному типичному геометрическому признаку, а именно, в частности, даже при высокой производительности, т.е. при множестве обрабатываемых в единицу времени емкостей. Для решения этой задачи устройство выполнено в соответствии с пунктом 1 формулы изобретения. Этикетировочная машина является объектом пункта 23.
У устройства, согласно изобретению, с помощью видеоданных первой системы слежения происходит предварительное выравнивание емкостей таким образом, что они после предварительного выравнивания имеют, по меньшей мере, в некоторой степени точно требуемую ориентацию, в частности также по отношению к их используемым для выравнивания геометрическим признакам, а именно, по меньшей мере, с точностью, достигаемой известными устройствами. Эта первая система слежения регистрирует контрольный участок, т.е. участок периферии соответствующей емкости, на котором находится, по меньшей мере, один геометрический признак.
На основе видеоданных, по меньшей мере, одной дополнительной системы слежения происходит затем более точное, возможно, также окончательное выравнивание каждой емкости. Поскольку участок емкости, регистрируемый, по меньшей мере, одной камерой, по меньшей мере, одной дополнительной системы слежения, намного меньше, чем участок, регистрируемый, по меньшей мере, одной камерой первой системы слежения, т.е., по меньшей мере, одна камера дополнительной системы слежения имеет, например, намного меньший апертурный угол, чем, по меньшей мере, одна камера первой системы слежения, выравнивание может происходить в крайне короткое время очень точно с использованием видеоданных, передаваемых, по меньшей мере, одной дополнительной системой слежения.
Изобретение более подробно поясняется ниже на примерах его осуществления с помощью чертежей, на которых изображают:
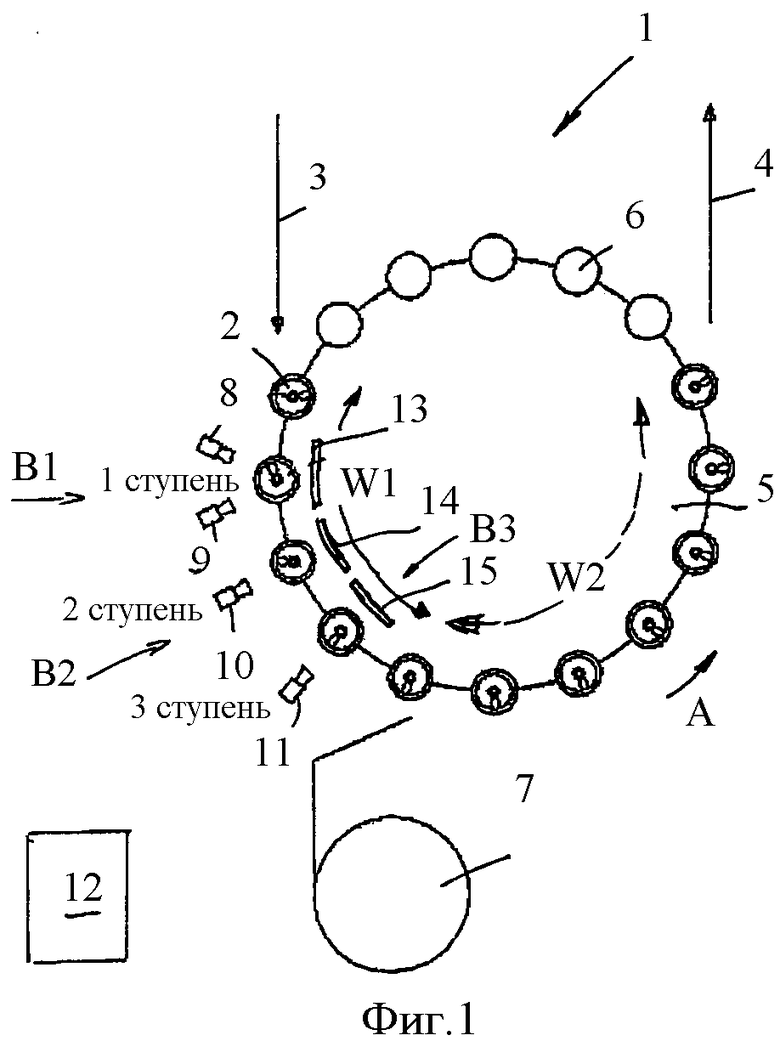
- фиг.1: схематично этикетировочную машину вращательного типа;
- фиг.2-7: различные виды для пояснения алгоритма при определении необходимого для корректировки ориентации угла поворота подставок для емкостей.
Изображенная на фиг.1 и обозначенная, в целом, поз.1 этикетировочная машина служит для этикетирования емкостей 2, например бутылок, которые подают к этикетировочной машине 1 на входе 3 и которые покидают этикетировочную машину 1 в этикетированном состоянии на выходе 4. Емкости 2 представляют собой, например, бутылки из просвечиваемого материала, например, стекла, и снабжены на своей внешней стороне соответственно, по меньшей мере, одним типичным геометрическим признаком, например орнаментом, тиснением, выпуклыми надписями и т.д. Емкости 2 должны быть снабжены этикетками с высокой точностью размещения по отношению к этим геометрическим признакам.
Этикетировочная машина 1 содержит, в том числе, приводимый во вращение вокруг вертикальной оси машины по стрелке А вращающийся стол или ротор 5, который имеет на своей периферии множество держателей или подставок 6 для емкостей, которые распределены вокруг вертикальной оси машины с равными угловыми расстояниями и на которых для размещения этикеток установлены емкости 3 со своей осью параллельно вертикальной оси машины.
Емкости 2 подают к этикетировочной машине 1 на входе 3 по транспортеру (не показан), правда, стоя, т.е. с ориентацией их осей в вертикальном направлении, однако с произвольной, чисто случайной ориентацией также по отношению к их типичным геометрическим признакам, передают каждую с этой чисто случайной ориентацией к подставке 6, а затем выравнивают в угловом диапазоне W1 вращательного движения А ротора 5, так что каждая емкость 3 в конце этого углового диапазона оказывается точно выровненной по отношению к своим типичным геометрическим признакам, т.е. имеет заданную ориентацию. В этом состоянии каждая емкость 2 движется мимо вращающейся заодно с ротором 5 этикетировочной станции 7 для размещения, по меньшей мере, одной этикетки, так что она затем оказывается размещенной на соответствующей емкости 2 с желаемой высокой точностью по отношению к ее геометрическим признакам. В следующем за этикетировочной станцией 7 до выхода 3 угловом диапазоне W2 вращательного движения А ротора 5 происходит затем обычное прижатие этикеток валиком и/или щеткой.
Для выравнивания емкостей 2 подставки 6 установлены с возможностью вращения посредством собственных сервоприводов вокруг оси параллельно вертикальной оси машины, а именно с управлением посредством более подробно описанной ниже многоступенчатой системы распознавания изображений с несколькими электронными камерами 9-11 и соответствующим, образованным преимущественно компьютером электронным блоком 12 обработки и управления.
В изображенном варианте вращающиеся заодно с ротором 5 камеры 8-11 установлены соответственно радиально за пределами траектории движения подставки 6 с возможностью регистрации каждой камерой движущихся мимо емкостей 2, по меньшей мере, на контрольном участке или на имеющем типичные геометрические признаки участке их внешней поверхности. Кроме того, все камеры 8-11 находятся в пределах углового диапазона W1 и, тем самым, направления А вращения перед этикетировочной станцией 7.
Более подробно обе камеры 8, 9, установленные на следующем за входом 3 участке углового диапазона W1, образуют первую систему слежения или первую ступень системы распознавания изображений, а именно вместе с вращающимся заодно с ротором 5, образующим белый фон или белое фоновое зеркало фоновым элементом 13, который в изображенном варианте расположен по отношению к кругообразной траектории движения подставок 6 радиально внутри и напротив обеих камер 8, 9, а также вместе с обозначенным стрелкой В1 освещением переднего плана. Обе камеры 8, 9 установлены своими оптическими осями под углом друг к другу с возможностью регистрации ими участка периферии или развертки более 180° соответственно движущейся мимо емкости 2. Передаваемые обеими камерами 8, 9 изображения или видеоданные составляют для этого, например, в одно общее изображение или в один общий набор данных, которое или который соответствует отображению развертки или участка периферии емкости более 180°.
За первой ступенью системы распознавания изображений следует образованная единственной камерой 10 вторая ступень этой системы. Камера 10 снабжена фоновым элементом 14, соответствующим элементу 13, образующим белый фон или белое фоновое зеркало, а именно в изображенном варианте по отношению к траектории движения подставки 6 радиально внутри. Далее также эта вторая ступень имеет освещение переднего плана, обозначенное стрелкой В2. Разумеется, что элементы 13, 14 первой и второй ступеней могут быть образованы также единственным сплошным элементом. Освещение переднего плана для обеих ступеней может быть образовано также одним или несколькими общими источниками света, например светящимися экранами. В принципе, в зависимости от оптических свойств емкостей для освещения переднего плана может быть выбрана осветительная техника, обеспечивающая оптимальную регистрацию используемых для выравнивания емкостей признаков. Далее за счет специального выполнения фонового элемента 13 и/или 14, например, за счет частичного зачернения белого фонового элемента 13 и/или 14, может быть достигнута усиленная оптическая регистрация кромочных профилей используемых для выравнивания емкостей признаков.
В направлении А вращения за второй ступенью (камера 10) следует образованная единственной камерой 11 третья ступень системы распознавания изображений, а именно с фоновым освещением В3, образованным, например, вращающимся заодно с ротором 5 светящимся экраном 15 на противоположной камере 11 стороне траектории движения подставки 6. Фоновое освещение В3 выбрано или может быть настроено в отношении цвета и/или интенсивности в зависимости от оптических свойств емкостей 2 или материала емкостей и/или в зависимости от оптических свойств содержимого для максимально оптимальной оптической регистрации.
Более подробно выравнивание емкостей 2 с помощью системы распознавания изображений происходит таким образом, что с помощью первой ступени или обеих камер 8, 9 регистрируют соответствующую случайную ориентацию движущейся мимо емкости 2 с одной подставкой на каждую емкость. За счет последующего сравнения передаваемых обеими системами 8, 9 слежения изображений или видеоданных в электронном блоке 12 с хранящимися в нем в памяти данных для соответствующего типа емкостей изображениями или видеоданными или типичными параметрами в электронном блоке 12 определяют актуальную ориентацию соответствующей емкости 2, на этой основе определяют необходимую корректировку для достижения требуемого предварительного выравнивания и посредством соответствующего управления сервоприводом соответствующей подставки 6 осуществляют корректировку.
Для каждой отдельной емкости 2 описанным образом посредством управления подставкой 6 осуществляют корректировку положения, так что каждая емкость оказывается выровненной, по меньшей мере, с одной точностью положения, которая обеспечивает последующую точную регистрацию положения, по меньшей мере, одного типичного признака, используемого для окончательного выравнивания.
На образованной камерой 10 второй ступени системы распознавания изображений каждую движущуюся мимо емкость 2 регистрируют на более узком участке ее типичного геометрического признака. Оптика камеры 10 выполнена для этого, например, так, что апертурный угол камеры 10 меньше соответствующего апертурного угла камер 8, 9, а имеющий типичный геометрический признак участок соответствующей емкости отображается с максимальным заполнением формата. Созданное каждой емкостью 2 изображение сравнивают в электронном блоке 12 с хранящимся там для данного типа емкостей изображением или с хранящимися там для данного типа емкостей параметрами, определяют на этой основе необходимую корректировку положения и инициируют ее затем посредством соответствующего управления сервоприводом соответствующей подставкой 6. За счет уменьшенного до типичного признака участка изображения с помощью второй ступени системы распознавания изображений уже достигается очень точное, резко улучшенное, в частности также по сравнению с предварительным выравниванием (с помощью первой ступени), выравнивание каждой емкости 2.
С помощью образованной камерой 11 третьей ступени происходит затем тонкая юстировка или тонкое выравнивание каждой емкости 2, прежде чем она достигнет этикетировочной станции 7. В качестве критерия при этом тонком выравнивании используют, например, по меньшей мере, один кромочный профиль или, по меньшей мере, одну типичную точку кромки, а именно, по меньшей мере, на одном, используемом для выравнивания типичном признаке емкости и/или в зоне этого признака. Переданные камерой 11 видеоданные сравнивают в электронном блоке 12 с хранящимися там для соответствующего типа емкостей видеоданными или с хранящимися там для соответствующего типа емкостей параметрами, так что затем из этого сравнения может быть вычислена, а посредством соответствующего управления сервоприводом соответствующей подставки осуществлена необходимая корректировка положения.
За счет описанной трехступенчатой оптической регистрации емкостей 2 или их типичных признаков очень точное выравнивание подаваемых к этикетировочной машине 1 с произвольной ориентацией или произвольным позиционированием емкостей достигается всего четырьмя камерами, прежде чем емкости попадут к этикетировочной станции 7, что обеспечивает желаемую точность размещения этикеток по отношению к типичным геометрическим признакам с высокой надежностью даже при очень высокой производительности этикетировочной машины, например, несколько десятков тысяч емкостей в час.
Детали алгоритма, используемого, по меньшей мере, на одной из ступеней системы распознавания изображений для определения необходимой корректировки, поясняются ниже.
Для осуществления точного распознавания угла поворота с точностью, по меньшей мере, один градус следует учесть цилиндрическую геометрию поверхности бутылки. При известной геометрии съемки (расстояние камеры до бутылки, диаметр бутылки) и известной геометрии тисненого узора можно произвести прилагаемый расчет для каждого угла поворота бутылки (например, шагами по 0,5 градуса) того, как тисненый узор для наблюдателя (= камеры) искажается на поверхности бутылки. Эти вычисленные искаженные тисненые узоры следует сравнить с наблюдаемым тисненым узором на снятой бутылке. Тот вычисленный тисненый узор, который лучше всего совпадает с наблюдаемым узором, и определяет угол поворота бутылки.
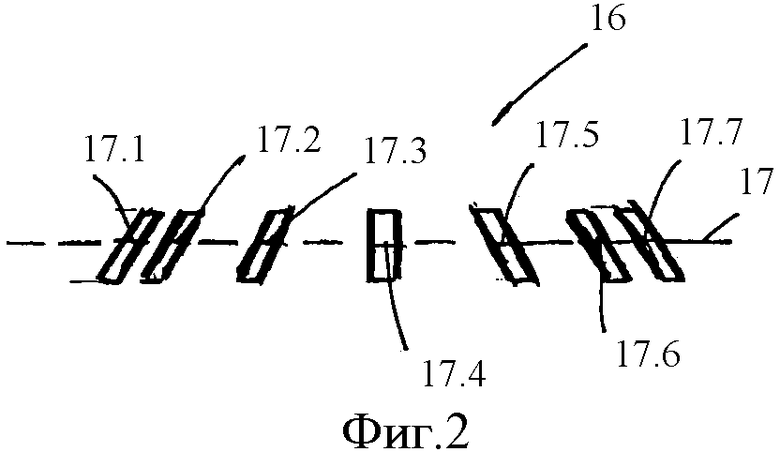
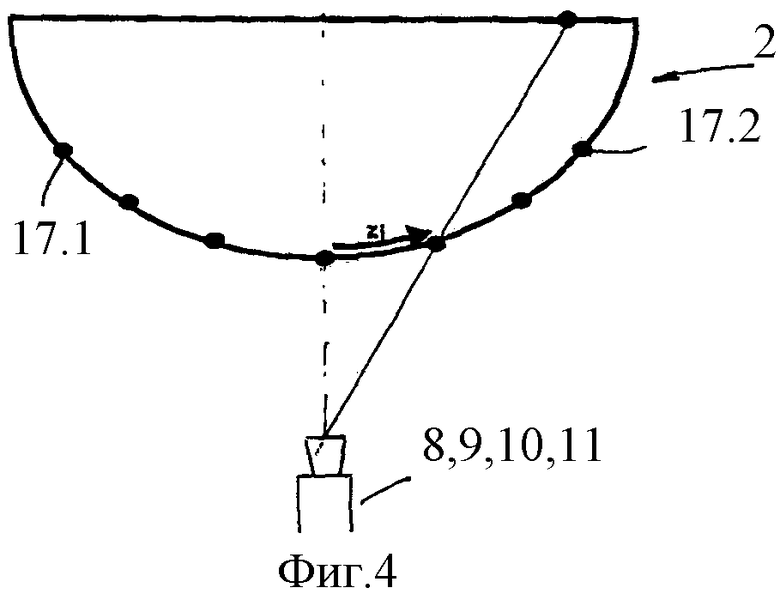
На фиг.2 в качестве примера типичного признака изображен тисненый узор 16 на бутылке по существу на виде спереди. Край и середина бутылки обозначены соответственно тонкой вертикальной красной линией. Принимается, что этому виду спереди соответствует угол поворота ноль градусов. Естественным образом нулевую точку угла поворота определяют на основе симметрии тисненого узора (т.е. «в середине тисненого узора»). Вдоль горизонтальной контрольной линии 17 указаны те точки 17.1-17.7, в которых тиснение пересекает контрольную линию 17. Эти точки называются далее точками тиснения.
Переменная xi обозначает увиденное положение точки тиснения на снятом изображении, а zi обозначает мировые координаты на поверхности бутылки. Текущий индекс i нумерует отдельные точки тиснения.
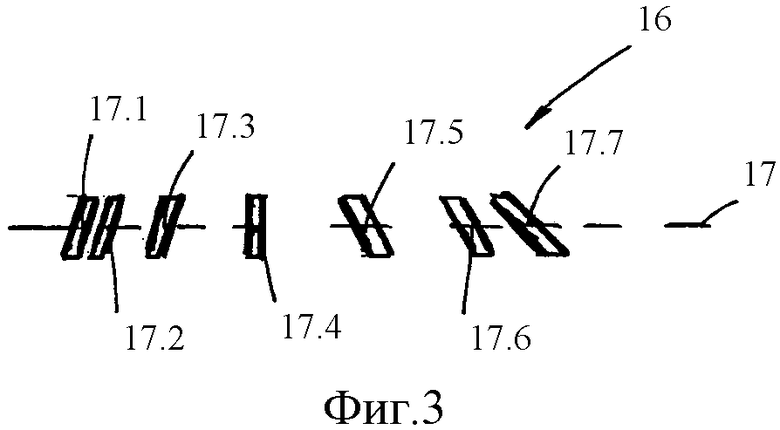
На фиг.3 изображен тот же тисненый узор, причем бутылка повернута на 24 градуса влево. Также на этом изображении маркированы точки тиснения. За счет поворота бутылки характерным образом изменились положение и расстояния между точками 17.1-17.7 тиснения. Например, из-за перспективного искажения на цилиндрическом корпусе бутылки сокращается по сравнению с неповернутым состоянием видимое расстояние между двумя соседними точками тиснения, которые приблизились к левому краю бутылки. При еще большем повороте части тисненого узора исчезли бы за горизонтом бутылки.
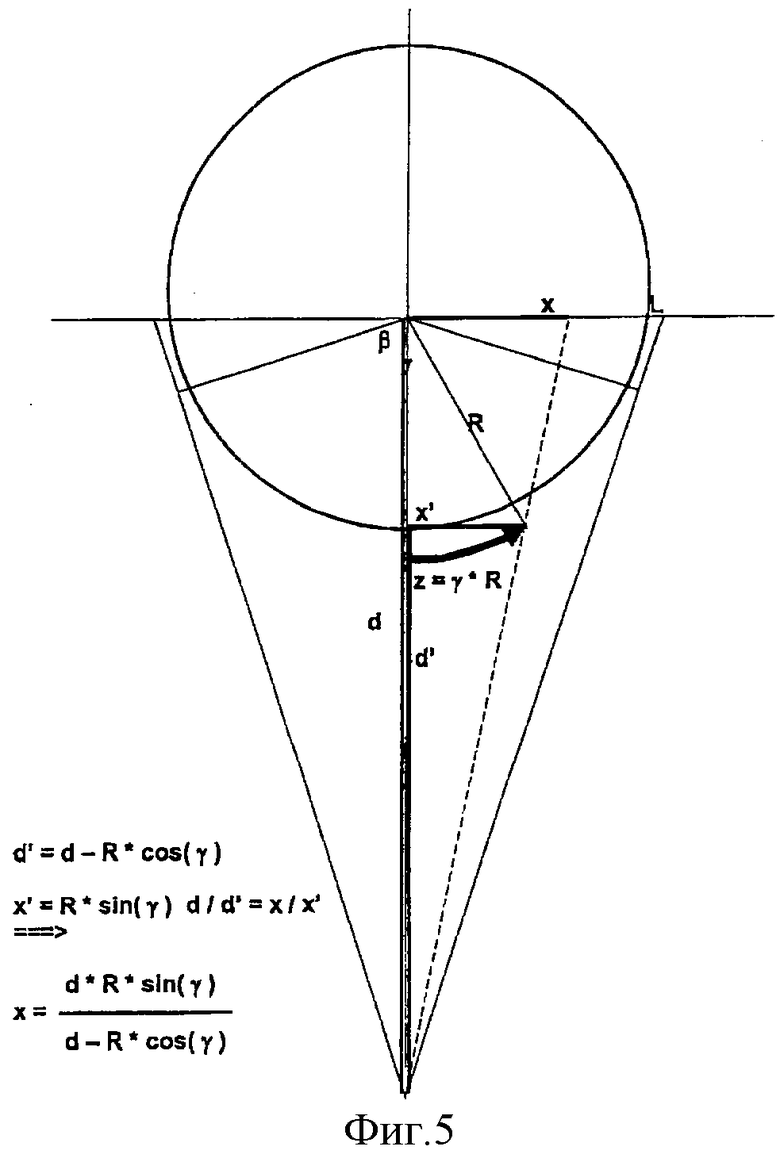
Геометрический расчет в соответствии с фиг.5 приводит к формулам (1) и (2).

При этом R обозначает радиус бутылки, a d - расстояние камеры до середины бутылки.
С помощью этих формул можно увиденное положение xi точек 17.1-17.7 тиснения пересчитать в мировые координаты zi на поверхности бутылки и наоборот. Чтобы можно было вычислить точное распределение точек 17.1-17.7 тиснения вдоль горизонтальной контрольной линии 17 в произвольный угол поворота бутылки, должно быть известно положение zi всех точек 17.1-17.7 тиснения на поверхности бутылки при известном угле поворота (например, ноль градусов) относительно оси симметрии (= нулевая точка) тисненого узора. Положение zi одной точки тиснения определяется при этом расстоянием, измеренным от увиденной середины бутылки вдоль ее поверхности.
В принципе, положение zi отдельных точек тиснения относительно средней линии можно измерить, приложив мерную ленту к телу бутылки, и предоставить в виде перечня в распоряжение алгоритму распознавания. Формула (2) позволяет, однако, получить эту информацию непосредственно из снятого изображения. Для этого на изображении с помощью известного угла поворота определяют увиденное положение xi. При известном радиусе R бутылки и известном расстоянии d до соответствующей камеры 8, 9, 10, 11 можно с помощью формулы (2) определить из этого мировые координаты zi на поверхности бутылки.
За счет этого сильно упрощается заучивание тисненого узора для алгоритма распознавания. Как обозначено на фиг.2 и 3 точками 17.1-17.7 тиснения, можно в виде компьютерной программы создать руководство пользователя, с помощью которого он сможет маркировать точки пересечения тисненого узора с контрольной линией 17. Формула (2) позволяет тогда сразу же пересчитать щелкнутые мышью экранные функции xi в мировые координаты zi на поверхности бутылки. Так, пользователь может предоставить в распоряжение алгоритму тисненый узор в виде перечня точек 17.1-17.2 тиснения.
Если однажды точки zi тиснения определены в мировые координаты для тисненого узора, то они могут быть пересчитаны с помощью формулы (1) для любых углов поворота бутылки в обратном порядке в увиденные положения xi. Алгоритм распознавания может вычислить, следовательно, для всех возможных углов φ поворота бутылки увиденные положения xi(φ) для данного тисненого узора. На практике зарекомендовало себя то, что алгоритм распознавания осуществляет этот расчет для всех углов φk поворота с угловым расстоянием 0,25 градуса, т.е. φk=0,25 градуса * k, где k=0, ±1, ±2, ±3, … Алгоритм распознавания может для каждого угла φk держать в памяти соответствующее распределение увиденных положений xi(φk) и не должен заново вычислять их для поиска узора в следующей бутылке с таким же тисненым узором. Благодаря этому можно значительно сократить время вычислений.
На следующем этапе алгоритм должен решить, какое распределение xi(φk) лучше всего подходит к наблюдавшейся на изображении ситуации. Для этого применяют способ, заключающийся в том, что каждому распределению xi(φk) соответствует оценочный коэффициент Sk. Этот оценочный коэффициент рассчитан так, что он тем выше, чем лучше наблюдавшаяся ситуация подходит к распределению. Наибольший оценочный коэффициент SkMax, достигаемый для данной ситуации изображения, определяет, тем самым, угол φkMax поворота бутылки.
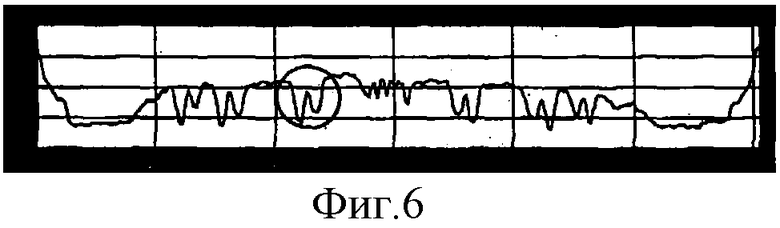
Для расчета оценочного коэффициента Sk первым делом определяют профиль Н(х) яркости вдоль контрольной линии 17 (фиг.6). При этом х обозначает положение элементов изображения вдоль горизонтального контрольного профиля.
В таком профиле яркости точки тиснения выделяются за счет заметных колебаний яркости на шкале длины, которая соответствует примерной ширине точки тиснения. На эти колебания яркости наложены еще другие колебания яркости, которые возникают, однако, на заметно большей шкале длины и могут быть отделены, тем самым, от вызванных точками тиснения колебаний яркости следующим образом: по профилю Н(х) яркости вычисляют профиль HAve(х) яркости, сглаживаемый на шкале длины, лежащей заметно выше ширины точки тиснения. Этот сглаженный профиль HAve(х) яркости вычитают из первоначального профиля Н(х) яркости и рассматривают только значения разностей, т.е.
HSub(x)=|H(x)-HAve(x)|.
Участки, на которых точки тиснения отсутствуют, имеют тогда очень малые значения HSub(х), тогда как в одной точке тиснения обнаруживаются высокие значения. За счет выбора подходящего порогового значения можно тогда, таким образом, идентифицировать места bi точек тиснения на данном изображении.
Оценочный коэффициент Sk распределения увиденных положений xi(φk) вычисляют тогда следующим образом.
Ищут пару bi и xi точек с минимальным расстоянием. Если это расстояние меньше заданного максимального расстояния d, то найденную пару точек оценивают как подходящую, т.е. предполагается, что найденное на изображении положение точки bi тиснения с положением тисненого узора подходит к повороту φk бутылки. В этом случае к оценочному коэффициенту прибавляют бонусное значение. Поскольку тисненые узоры разных бутылок никогда не бывают точно одинаковыми, а геометрия и положение бутылок относительно камеры при видеосъемке подвержены колебаниям, никогда нельзя исходить из точного совпадения пары bi и xi точек. Поэтому на максимальном расстоянии d требуется, чтобы точки лежали достаточно близко друг к другу. Если пара точек найдена таким образом, то их как уже соответствующие маркируют во внутреннем перечне алгоритма. Для оставшихся точек процесс повторяют до тех пор, пока все возможные точки либо не будут соответствовать, либо пока все точки не будут распознаны как соответствующие (т.е. для точки bi не была обнаружена модельная точка xj, лежащая достаточно близко).
Если для модельных точек xj не были обнаружены соответствующие точки bi, то для этого из оценочного коэффициента Sk вычитают малусные значения.
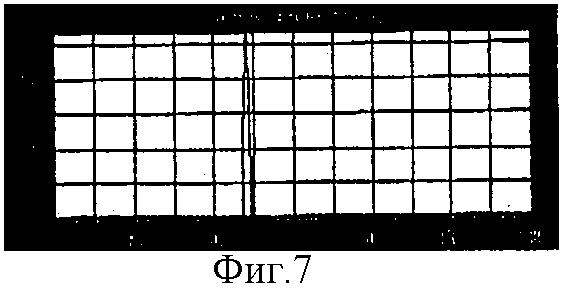
На фиг.7 для изображенного на фиг.3 примера представлена зависимость оценочного коэффициента Sk в зависимости от угла. Видно, что примерно при -24 градусах имеет место острый максимум, т.е. увиденный точечный узор bi лучше всего соответствует точечному узору xj при угле поворота бутылки -24 градуса.
Изобретение было описано выше на одном примере его осуществления. Понятно, что возможны многочисленные изменения и модификации, не выходящие за рамки лежащей в основе изобретения идеи. Так, выше рассуждения исходили из того, что первая ступень системы распознавания изображений содержит две камеры 8, 9, а вторая или третья ступень - только по одной камере 10 или 11. Само собой, число камер на этих ступенях может быть выбрано также иным, причем, однако, необходимо, по меньшей мере, однако, целесообразно, чтобы система слежения первой ступени регистрировала как можно больший участок периферии каждой направляемой мимо емкости 2.
В изображенном варианте камеры 8-11 выполнены и управляются с возможностью создания изображения или набора видеоданных каждой направляемой мимо емкости 2, после чего на основе этого набора видеоданных происходят предварительное выравнивание (на первой ступени), предварительная юстировка (на второй ступени) и тонкая юстировка (на третьей ступени) посредством сравнения с соответствующими видеоданными.
Перечень ссылочных позиций
1 - этикетировочная машина
2 - емкость или бутылка
3 - вход для емкостей
4 - выход для емкостей
5 - ротор или вращающийся стол
6 - подставка для емкости
7 - этикетировочная станция
8-11 - электронная камера
12 - блок обработки и управления
13, 14 - фоновый элемент или фоновое зеркало
15 - элемент фонового освещения, например светящийся экран
16 - тисненый узор или признак емкости
17 - контрольная линия
17.1-17.7 - точка пересечения или тиснения
А - направление вращения ротора 5
B1, B2, В3 - освещение
W1, W2 - угловой диапазон вращательного движения ротора 5
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОЧНО ПОЗИЦИОНИРОВАННОЙ НАКЛЕЙКИ ЭТИКЕТОК И ЭТИКЕТИРОВОЧНАЯ МАШИНА | 2007 |
|
RU2405723C1 |
| ОПТОЭЛЕКТРИЧЕСКАЯ РЕГИСТРИРУЮЩАЯ СИСТЕМА | 2008 |
|
RU2425360C1 |
| СПОСОБ, А ТАКЖЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ПЕЧАТИ НА ЕМКОСТЯХ | 2007 |
|
RU2392205C1 |
| СВЕТОПРОНИЦАЕМЫЙ ПАТРОН | 2010 |
|
RU2520040C1 |
| СИСТЕМА СБОРА ИНФОРМАЦИИ И СПОСОБ ПРОВЕРКИ ОРИЕНТАЦИИ ШВА НА БУТЫЛКЕ И ВЫГРАВИРОВАННОГО РИСУНКА | 2011 |
|
RU2518367C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ПОРОЖНИХ БУТЫЛОК | 2013 |
|
RU2579635C1 |
| МАШИНА ДЛЯ ОФОРМЛЕНИЯ БУТЫЛОК ИЛИ ПОДОБНЫХ ЕМКОСТЕЙ, В ЧАСТНОСТИ ЭТИКЕТИРОВОЧНАЯ МАШИНА | 2007 |
|
RU2357896C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2336571C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРИКРЕПЛЕНИЯ ЭТИКЕТОК НА ЕМКОСТЯХ | 2002 |
|
RU2286927C2 |
| Способ получения набора объектов трехмерной сцены | 2019 |
|
RU2803287C1 |
Устройство для выравнивания емкостей по отношению, по меньшей мере, к одному их геометрическому признаку в заданное положение или с заданной ориентацией содержит транспортер с подставками для размещения одной емкости и камеры системы распознавания изображений. Предварительное выравнивание емкостей происходит с помощью камеры системы распознавания изображений системы слежения, которая выполнена с возможностью регистрации имеющей типичный геометрический признак внешней или периферийной поверхности емкости на большой площади. Для дальнейшего выравнивания емкостей выполнена дополнительная система слежения с возможностью регистрации камерой, по меньшей мере, одного типичного геометрического признака на более узком участке периферийной поверхности. При этом электронный блок, на основе дополнительных хранящихся видеоданных или параметров, при существующих отклонениях от заданного положения, вызывает дальнейшее выравнивание емкости, посредством сервопривода соответствующей подставки. Предложенное устройство обеспечивает выравнивание емкостей с существенно более высокой точностью и скоростью. 2 н. и 21 з.п. ф-лы, 7 ил.
1. Устройство для выравнивания емкостей (2) по отношению, по меньшей мере, к одному их геометрическому признаку (16) в заданное положение или с заданной ориентацией, содержащее транспортер (5) с подставками (6) для размещения соответственно одной емкости и установленные вдоль образованного транспортером (5) транспортного тракта камеры (8, 9, 10) системы распознавания изображений, которая за счет сравнения переданных камерами (8, 9, 10) фактических видеоданных с хранящимися в электронном блоке (12) обработки и управления заданными видеоданными или параметрами вызывает выравнивание емкостей (2), отличающееся тем, что с помощью образующей первую ступень системы распознавания изображений системы слежения происходит предварительное выравнивание емкостей (2), по меньшей мере, одна камера (8, 9) этой первой системы слежения выполнена с возможностью регистрации имеющей типичный геометрический признак (16) внешней или периферийной поверхности емкости на большой площади, по меньшей мере, одна следующая в направлении транспортировки дополнительная система слежения для дальнейшего выравнивания выполнена с возможностью регистрации, по меньшей мере, одной своей камерой (10, 11) каждой направляемой мимо емкости (2) для дальнейшего выравнивания на имеющем, по меньшей мере, один типичный геометрический признак (16) более узком участке периферийной поверхности, при этом электронный блок на основе дополнительных хранящихся видеоданных или параметров при существующих отклонениях от заданного положения вызывает посредством сервопривода соответствующей подставки (6) для емкости ее дальнейшее выравнивание.
2. Устройство по п.1, отличающееся тем, что в направлении (А) транспортировки транспортера (5) вслед за образующей первую ступень системы распознавания изображений первой системой слежения расположены, по меньшей мере, одна вторая, образующая вторую ступень системы распознавания изображений система слежения, и третья, образующая третью ступень системы распознавания изображений система слежения соответственно, по меньшей мере, с одной камерой (10, 11).
3. Устройство по п.1, отличающееся тем, что с помощью первой системы слежения или, по меньшей мере, одной камеры (8, 9) этой системы регистрируют участок периферии соответствующей емкости (2), составляющий более 180°.
4. Устройство по п.1, отличающееся тем, что первая система слежения содержит, по меньшей мере, две камеры (8, 9), установленные своими осями под углом друг к другу.
5. Устройство по п.4, отличающееся тем, что переданные, по меньшей мере, двумя камерами (8, 9) первой системы слежения изображения или видеоданные комбинируют в электронном блоке (12) в одно общее изображение.
6. Устройство по п.1, отличающееся тем, что, по меньшей мере, одна система слежения содержит, по меньшей мере, две камеры (8, 9).
7. Устройство по п.1, отличающееся тем, что, по меньшей мере, одна дополнительная система слежения, в частности вторая и третья системы слежения, содержат соответственно только одну камеру (10).
8. Устройство по п.1, отличающееся тем, что системы слежения или их камеры выполнены для создания отдельных изображений, направляемых мимо емкостей (2).
9. Устройство по п.1, отличающееся тем, что камеры (8, 9, 10, 11) систем слежения выполнены и/или управляются с возможностью создания ими соответственно только одного изображения каждой направляемой мимо емкости (2).
10. Устройство по п.1, отличающееся тем, что, по меньшей мере, одна система слежения, преимущественно первая система слежения, выполнена с освещением (В1, В2) переднего плана.
11. Устройство по п.1, отличающееся тем, что, по меньшей мере, одна система слежения, например, по меньшей мере, одна дополнительная система слежения или третья система слежения, выполнена для создания изображений или видеоданных посредством просвечивания.
12. Устройство по п.1, отличающееся тем, что, по меньшей мере, одна система слежения выполнена с фоновым освещением.
13. Устройство по любому из предыдущих пунктов, отличающееся тем, что освещение переднего плана или фоновое освещение выполнено с возможностью настройки по цвету и/или интенсивности.
14. Устройство по п.1, отличающееся тем, что транспортер представляет собой приводимый во вращение вокруг вертикальной оси машины ротор (5).
15. Устройство по п.1, отличающееся тем, что каждая подставка (6) для емкости содержит собственный сервопривод.
16. Устройство по п.1, отличающееся тем, что подставки (6) для емкостей представляют собой вращающиеся тарелки.
17. Устройство по п.1, отличающееся тем, что электронный блок (12) выполнен с возможностью сравнения расстояния между, по меньшей мере, двумя опорными точками (17.1-17.7) типичного признака (16) соответствующей емкости (2) в переданных, по меньшей мере, одной камерой (8, 9, 10, 11) видеоданных, по меньшей мере, с хранящимися для данного типа емкостей параметрами.
18. Устройство по п.1, отличающееся тем, что электронный блок (12) выполнен с возможностью сравнения расстояния между, по меньшей мере, двумя опорными точками (17.1-17.7) типичного признака (16) соответствующей емкости (2) в переданных, по меньшей мере, одной камерой (8, 9, 10, 11) видеоданных, по меньшей мере, с одним хранящимся для данного типа емкостей образцом расстояния.
19. Устройство по любому из пп.17 или 18, отличающееся тем, что электронный блок (12) выполнен с возможностью сравнения расстояния или образца расстояния между опорными точками (17.1-17.7) в переданных, по меньшей мере, одной камерой (8, 9, 10, 11) видеоданных с хранящимися для данного типа емкостей расстояниями или образцами расстояний, определения расстояния или образца расстояния, наиболее совпадающего соответственно с расстоянием или образцом расстояния в видеоданных, и вычисления на основе этого необходимой корректировки для выравнивания емкости (2).
20. Устройство по п.1, отличающееся тем, что оно является составной частью этикетировочной машины (1) с входом (3) для этикетируемых емкостей (2), выходом (4) для этикетированных емкостей (2) и, по меньшей мере, одной этикетировочной станцией (7), предусмотренной на транспортном тракте, который образован транспортером (5) между входом (3) и выходом (4), при этом первая система слежения, а также, по меньшей мере, одна дополнительная система слежения предусмотрены на транспортном тракте между входом (3) и, по меньшей мере, одной этикетировочной станцией (7).
21. Устройство по 20, отличающееся тем, что транспортер представляет собой приводимый во вращение вокруг вертикальной оси машины ротор (5) с множеством подставок (6) для емкостей.
22. Устройство по п.1, отличающееся тем, что каждая подставка для емкости установлена с возможностью вращения посредством управляемого электронным блоком сервопривода для выравнивания расположенной на этой подставке емкости (2).
23. Этикетировочная машина с устройством для выравнивания емкостей (2) по отношению, по меньшей мере, к одному их геометрическому признаку (16) в заданное положение или с заданной ориентацией, отличающаяся тем, она выполнена по любому из предыдущих пунктов.
| EP 1205388 A1, 15.05.2002 | |||
| Способ получения производных аминопропанола или их солей | 1977 |
|
SU1041033A3 |
| КЕРАМИЧЕСКАЯ МАССА ДЛЯ ИЗГОТОВЛЕНИЯ ОБЛИЦОВОЧНОЙ ПЛИТКИ | 2007 |
|
RU2341486C2 |
| DE 68907374 T2, 14.10.1993 | |||
| RU 2004111673 A, 27.02.2005. | |||

