Область техники
Настоящее изобретение относится к инверторному генератору, в частности к инверторному генератору, оснащенному блоком генератора с приводом от двигателя внутреннего сгорания, в котором цикл ШИМ-управления варьируется.
Уровень техники
Хорошо известные инверторные генераторы вначале осуществляют преобразование переменного тока, выдаваемого блоком генератора с приводом от двигателя, в постоянный ток, после чего преобразуют постоянный ток в переменный ток заданной частоты (частоты питающей сети) посредством управления ключевыми (переключающими) элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального (гармонического) сигнала, имеющего форму волны требуемого выходного напряжения, и несущего сигнала. Пример такого инверторного генератора можно найти в опубликованной японской заявке на изобретение №Н4(1992)-355672 ('672).
В традиционном инверторном генераторе, раскрытом в данной публикации, несущая частота имеет постоянное фиксированное значение, как показано на фиг.6 описания, и, естественно, цикл управления, определенный периодом несущей частоты, также имеет постоянную фиксированную величину.
Раскрытие изобретения
Поскольку с уменьшением несущей частоты цикл управления удлиняется, соответственно могут быть также снижены коммутационные потери. Однако, с другой стороны, возрастают пульсации напряжения и нелинейные искажения. Для устранения нелинейных искажений LC-фильтр должен иметь более высокие эксплуатационные характеристики.
Таким образом, задача настоящего изобретения заключается в решении вышеуказанной проблемы посредством предложения инверторного генератора, преобразующего ток в переменный ток заранее заданной частоты с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, и несущего сигнала, при этом коммутационные потери в генераторе снижаются, а увеличение составляющих нелинейных искажений подавляется.
Для достижения указанной цели в соответствии с первым аспектом настоящего изобретения предлагается инверторный генератор, содержащий блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, в каждом цикле управления, определяемом несущей частотой, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты. Согласно изобретению управляющее устройство инвертора изменяет несущую частоту в соответствии с наклоном опорного синусоидального сигнала.
Для достижения указанной выше цели в соответствии со вторым аспектом настоящего изобретения предлагается способ управления инверторным генератором, содержащим блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, в каждом цикле управления, определяемом несущей частотой, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты. Согласно изобретению способ включает следующий шаг: изменение несущей частоты в соответствии с наклоном опорного синусоидального сигнала.
Краткое описание чертежей
Вышеуказанные и прочие цели и преимущества настоящего изобретения более подробно объясняются в нижеследующем описании со ссылкой на сопроводительные чертежи, на которых:
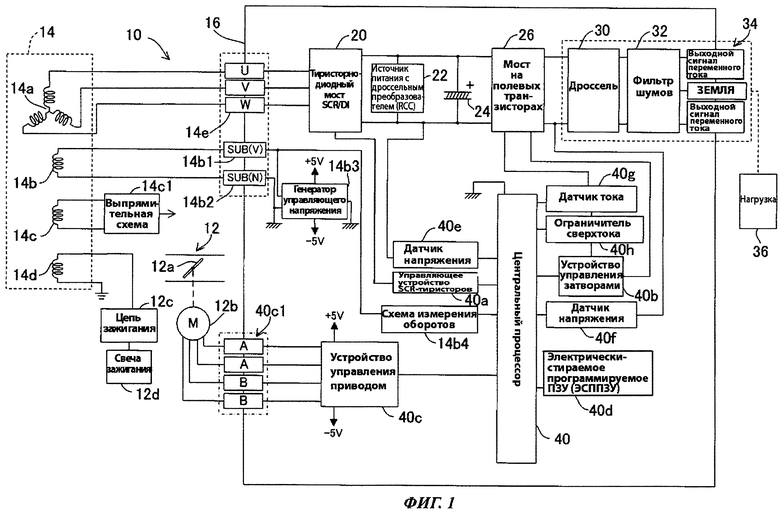
на фиг.1 изображена блок-схема, показывающая общую структуру инверторного генератора в соответствии с вариантом осуществления настоящего изобретения;
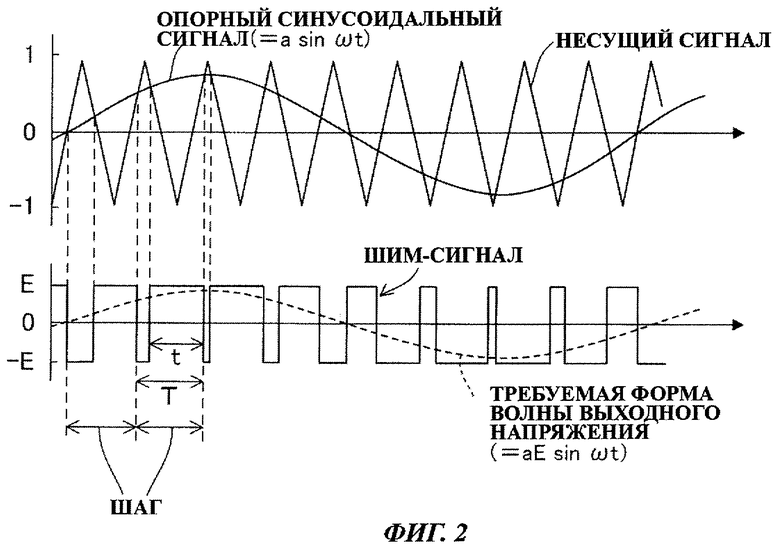
на фиг.2 представлено графическое изображение сигналов для объяснения процесса ШИМ-управления, осуществляемого ЦП (CPU), изображенным на фиг.1;
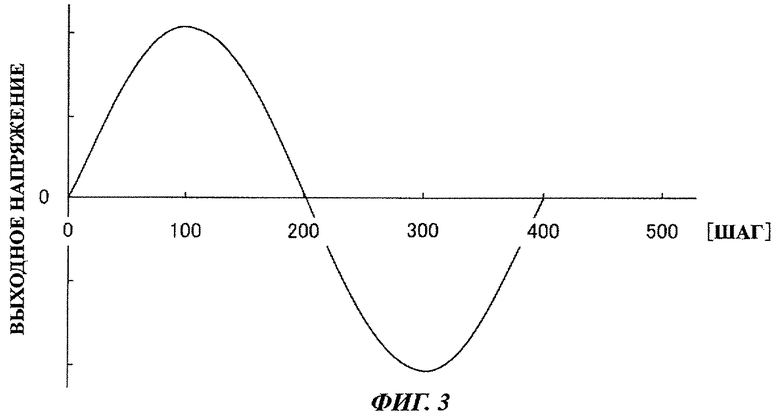
на фиг.3 представлено графическое изображение сигналов, показывающее цикл управления (шаг), когда несущая частота поддерживается постоянной или фиксированной в процессе ШИМ-управления, осуществляемом ЦП, изображенным на фиг.1;
на фиг.4 представлено графическое изображение сигналов, показывающее цикл управления (шаг), когда несущая частота изменяется в процессе ШИМ-управления, осуществляемом ЦП, изображенным на фиг.1;
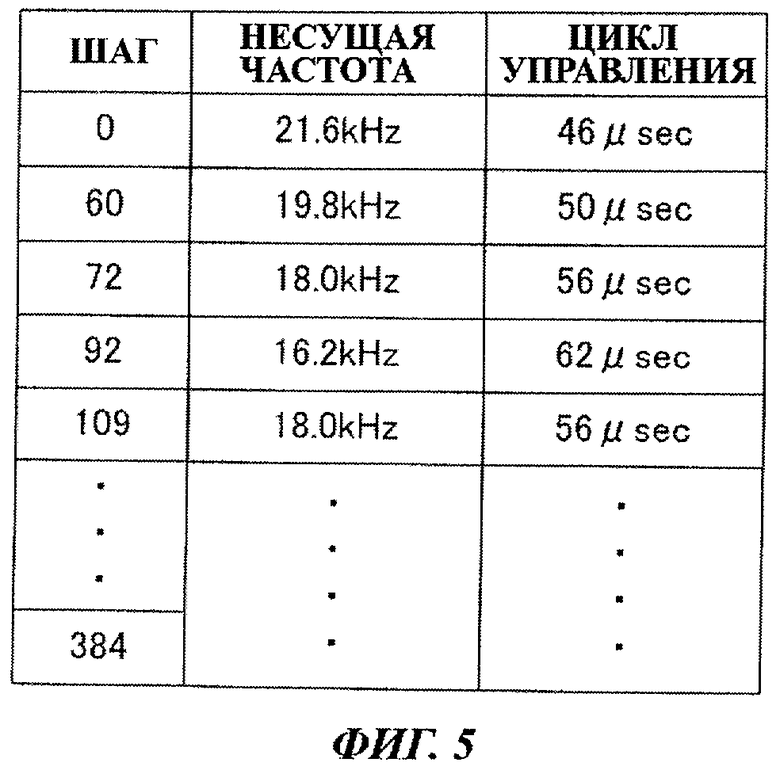
на фиг.5 представлена таблица значений, которые используются в осуществляемом ЦП процессе ШИМ-управления, показанном на фиг.4, и
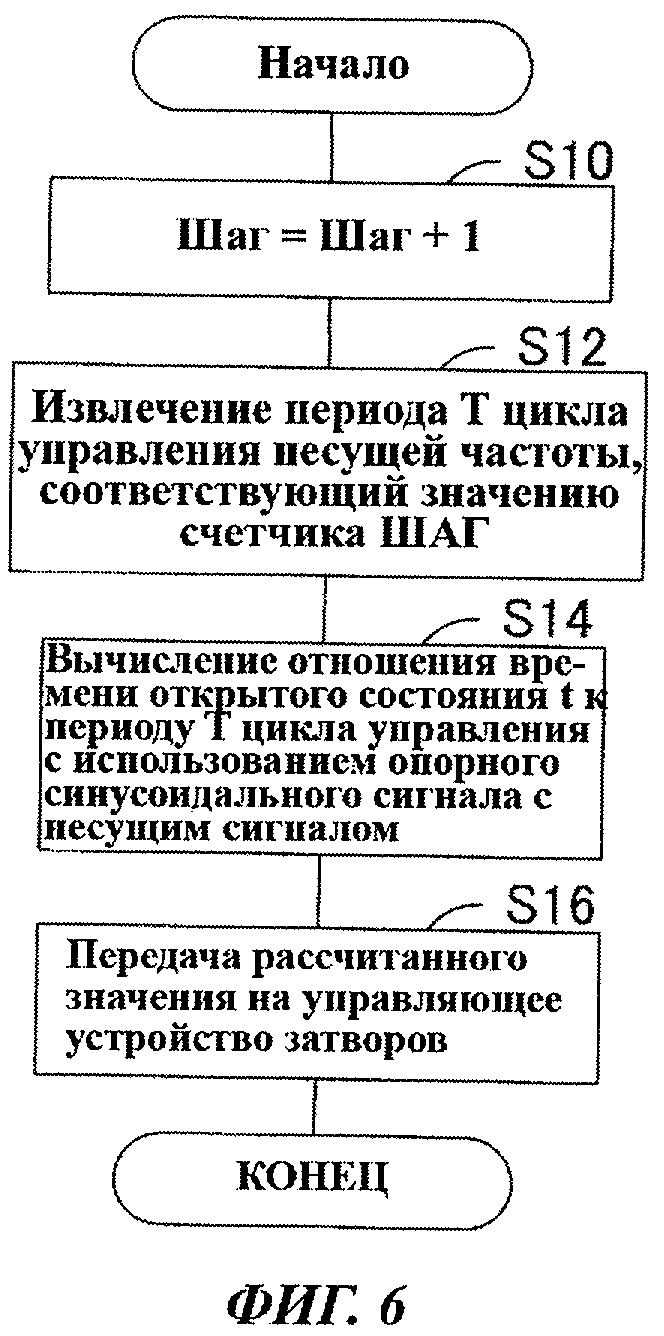
на фиг.6 представлена блок-схема работы ЦП в процессе управления, показанном на фиг.4.
Осуществление изобретения
Инверторный генератор в соответствии с вариантом осуществления настоящего изобретения далее описывается более подробно со ссылкой на сопроводительные чертежи.
На фиг.1 представлена блок-схема, показывающая общую структуру инверторного генератора в соответствии с вариантом осуществления настоящего изобретения.
Инверторный генератор обозначен поз.10 на фиг.1. Генератор 10 оснащен двигателем (двигателем внутреннего сгорания) 12 и имеет номинальную выходную мощность около 3 кВт (100 В, 30 А переменного тока). Двигатель 12 представляет собой двигатель с воздушным охлаждением и искровым зажиганием. Его дроссель 12а открывается и закрывается приводом (актюатором) 12b дросселя, представляющим собой шаговый двигатель. Двигатель 12 запускается ручным стартером (не показан).
Круговой статор (не показан) закреплен вблизи от головки блока цилиндров двигателя 12. Статор снабжен обмотками, образующими блок 14 электромашинного генератора, а именно трехфазными (U, V и W) выходными обмотками (главными обмотками) 14а и тремя однофазными обмотками 14b, 14с и 14d.
Ротор (не показан), выполненный в виде маховика двигателя 12, установлен снаружи статора. В роторе напротив вышеупомянутых обмоток 14а и т.д. установлены постоянные магниты (не показаны) с чередованием радиальной полярности их полюсов.
При вращении постоянных магнитов ротора, окружающего статор, на выходе трехфазных выходных обмоток 14а создается (генерируется) трехфазный (U, V и W фазы) переменный ток, а на выходе однофазных выходных обмоток 14b, 14с и 14а возникает однофазный переменный ток.
Трехфазный переменный ток, создаваемый (генерируемый) выходными обмотками 14а блока 14 генератора, поступает через клеммы 14е (U, V и W) на плату 16 управления (печатную плату) и подается в установленный на ней конвертор 20. Конвертор 20 содержит соединенные по мостовой схеме три тиристора SCR (silicon-controlled rectifier, однооперационный триодный тиристор) и три диода DI. Трехфазный переменный ток, создаваемый на выходе блока 14 генератора, преобразуется в постоянный ток посредством управления углами проводимости (включения) тиристоров.
Источник питания 22 с дроссельным преобразователем RCC (ringing choke converter, преобразователь с переходными процессами в дросселе) (стабилизированный источник питания постоянного тока) соединен с боковыми положительным и отрицательным электрическими выводами конвертора 20 и подает выпрямленное напряжение постоянного тока в качестве рабочего напряжения питания на три тиристора. После RCC-источника питания 22 в цепь включен сглаживающий конденсатор 24 для сглаживания постоянного тока на выходе конвертера 20.
Инвертор 26 включен в цепь после сглаживающего конденсатора 24. Инвертор 26 имеет мостовую схему с четырьмя полевыми транзисторами (ключевыми элементами). Как объяснено ниже, постоянный ток на выходе конвертера 20 преобразуется в переменный ток заданной частоты (50 Гц или 60 Гц частоты питающей сети) посредством управления состоянием проводимости (ОТКРЫТ-ЗАКРЫТ) четырех полевых транзисторов.
Выходной сигнал инвертора 26 проходит через дроссель 30, состоящий из LC-фильтра для подавления гармоник, и через фильтр шумов 32 для подавления помех, и подается на выходные клеммы 34, с которых он может быть подан на электрическую нагрузку 36 через соединительный проводник (не показан) или аналогичный элемент.
Плата 16 управления оснащена центральным процессором (ЦП) 40 с 32-битной архитектурой. ЦП 40 управляет углом проводимости тиристоров конвертера 20 с помощью тиристорного (SCR) управляющего устройства (схемы управления) 40а, состоянием проводимости полевых транзисторов инвертора 26 с помощью устройства управления 40b затворами, а также работой привода 12b дросселя с помощью устройства управления 40 с приводом. ЦП 40 оснащен устройством памяти EEPROM (ЭСППЗУ, электрически-стираемое программируемое постоянное запоминающее устройство) (энергонезависимым ЗУ) 40а.
Выходной сигнал первой однофазной выходной обмотки 14b подается на плату управления 16 через клеммы 14b1 и 14b2, а с нее - на генератор 14b3 управляющего напряжения, который генерирует рабочее напряжение питания 5 В для ЦП 40. Выходной сигнал с клеммы 14b1 подается на схему 14b4 измерения оборотов, где он преобразуется в импульсный сигнал и подается на ЦП 40. ЦП 40 подсчитывает импульсы выходного сигнала схемы 14b4 измерения оборотов для вычисления (измерения) скорости вращения двигателя 12.
Выходной сигнал второй однофазной выходной обмотки 14с подается на схему двухполупериодного выпрямителя 14с1, где осуществляется его двухполупериодное выпрямление для формирования рабочего напряжения питания для привода 12b дросселя и других устройств. Выходной сигнал третьей выходной обмотки 14d подается на схему 12с зажигания двигателя 12 для использования в качестве напряжения питания свечи 12d зажигания.
ЦП 40 соединен с первым и вторым датчиками напряжения 40е и 40f. Первый датчик напряжения 40е, включенный после RCC-источника питания 22, генерирует выходной сигнал, пропорциональный выходному напряжению постоянного тока конвертера 20. Второй датчик напряжения 40f, включенный после инвертора 26, генерирует выходной сигнал, пропорциональный выходному напряжению переменного тока инвертора 26. Выходные сигналы первого и второго датчиков напряжения 40е и 40f подаются на ЦП 40.
ЦП 40 также соединен с датчиком тока 40g. Датчик тока 40g генерирует выходной сигнал, пропорциональный значению тока на выходе инвертора 26, т.е. тока, проходящего через электрическую нагрузку 36, когда нагрузка 36 подключена.
Выходной сигнал датчика тока 40d подается в ЦП 40, а также в ограничитель сверхтока 40h, выполненный в виде логической схемы (аппаратной схемы), независимой от ЦП 40. Когда ток, измеренный датчиком тока 40g, превышает предельно допустимое значение, ограничитель сверхтока 40h временно отключает выходной сигнал устройства 40b управления затворами для временного обнуления выходного сигнала инвертора 26.
ЦП 40, на основе подаваемых на его вход выходных сигналов первого и второго датчиков напряжения 40е, 40f и датчика тока 40g, осуществляет ШИМ-управление полевыми транзисторами инвертора 26 и управляет работой привода 12b дросселя, тем самым также ограничивая сверхток.
На фиг.2 представлено графическое изображение сигналов для объяснения процесса ШИМ-управления, осуществляемого ЦП 40.
Процесс ШИМ-управления полевыми транзисторами инвертора 26 будет описан со ссылкой на фиг.2. На основании опорного синусоидального сигнала (сигнальной волны) с учетом заданной частоты (50 Гц или 60 Гц частоты питающей сети), имеющего форму волны требуемого выходного напряжения (волна, изображенная нижней пунктирной линией), ЦП 40 использует компаратор (не показан) для сравнения опорного сигнала с несущим сигналом (например, с несущего волной частотой 20 кГц), генерирует ШИМ-сигнал (сигнал ШИМ-формы), а именно последовательность импульсов с переменным коэффициентом заполнения (отношения длительности t импульса к периоду Т его следования) в соответствии с принципом широтно-импульсной модуляции (ШИМ), и выдает выходной сигнал через устройство 40b управления затворами.
Волна, изображенная нижней пунктирной линией на фиг.2, изображает требуемую форму волны выходного напряжения. Период Т (шаг) ШИМ-сигнала (сигнала ШИМ-формы), в действительности является значительно более коротким, чем это показано на фиг.2, где он увеличен с целью облегчения понимания.
ЦП 40 управляет открытием дросселя 12а для установки требуемой скорости вращения двигателя, рассчитанной на основании выходного переменного тока, определяемого электрической нагрузкой 36, рассчитывает выходные импульсы фазы А и фазы В для шагового привода 12b дросселя и подает их через устройство управления 40с приводом на привод 12b дросселя с выходных клемм 40с1, управляя тем самым работой привода 12b.
Далее будет вновь объяснен упомянутый выше процесс ШИМ-управления, осуществляемый ЦП 40.
Когда, например, несущая частота поддерживается постоянной или фиксируется на уровне 20 кГц, а требуемая частота волны выходного напряжения составляет 50 Гц, цикл управления (шаг), определяемый периодом несущей частоты, также является постоянным или фиксированным на уровне 50 микросекунд, как показано на фиг.3.
Поскольку с уменьшением несущей частоты цикл управления удлиняется, коммутационные потери полевых транзисторов могут быть снижены на величину, соответствующую удлиненному циклу. С другой стороны, пульсации напряжения и нелинейные искажения при этом возрастают. Для устранения нелинейных искажений эксплуатационные характеристики дросселя 30 должны быть повышены.
Поэтому данный вариант осуществления изобретения предполагает изменение несущей частоты в соответствии с наклоном волны опорного синусоидального сигнала; более конкретно, несущая частота уменьшается с уменьшением наклона (крутизны) опорного синусоидального сигнала, как показано на фиг.4.
Еще более конкретно, если, например, как показано на фиг.4, наклон (крутизна) опорного синусоидального сигнала, обозначенный Δ2, меньше (т.е. более пологий), чем наклон, обозначенный Δ1, несущая частота определяется соответственно равной 20 кГц в интервале Δ1 и определяется равной 16 кГц в интервале Δ2.
В результате количество шагов, т.е. циклов управления, точнее количество управляющих переключений полевых транзисторов, может быть снижено с 400 до 384, как показано на фиг.4. Коммутационные потери могут быть снижены на величину, соответствующую уменьшению количества шагов, что увеличивает эффективность генератора. Далее благодаря уменьшению количества управляющих переключений может быть снижен нагрев полевых транзисторов.
Далее несущая частота изменяется в соответствии с наклоном опорного синусоидального сигнала, т.е. уменьшается с уменьшением наклона опорного синусоидального сигнала. Более конкретно, когда наклон мал (т.е. пологий), несущая частота снижается с увеличением длительности цикла управления (более редкие циклы), в то время, как при большем наклоне (более крутом) несущая частота увеличивается, а циклы управления становятся более короткими (более частыми).
Благодаря такому исполнению становится возможным генерация волны выходного напряжения, максимально точно воспроизводящей форму опорного синусоидального сигнала. Кроме того, поскольку увеличение нелинейных искажений может быть подавлено, отсутствует необходимость повышать эксплуатационные характеристики дросселя 30.
В данном варианте осуществления, как показано на фиг.5, значение несущей частоты определяется заранее, исходя из наклона опорного синусоидального сигнала, и полученные значения запоминаются в виде табличных значений вместе с длительностями циклов управления, которые могут быть извлечены по номеру цикла (шага). Таким образом, значения несущей частоты подготавливаются в виде табличных данных, которые могут извлекаться по номерам циклов управления (т.е. шагов).
На фиг.6 представлена блок-схема работы ЦП 40 с использованием табличных значений.
Программа начинается на шаге S10, на котором значение счетчика ШАГ, подсчитывающего количество шагов, увеличивается на 1. Далее программа переходит к шагу S12, на котором извлекается значение периода Т цикла управления для несущей частоты, соответствующий значению счетчика ШАГ; далее программа переходит к шагу S14, на котором рассчитывается соотношение времени ОТКРЫТОГО состояния (длительности импульса) t к периоду Т цикла управления с помощью сравнения опорного синусоидального сигнала с несущим сигналом, и осуществляется переход к шагу S16, на котором рассчитанное значение выдается на управляющее устройство 40b затворов, после чего программа заканчивается.
Как указывалось выше, данный вариант осуществления предусматривает инверторный генератор 10 (и способ управления генератором 10), содержащий блок 14 генератора, приводимый от двигателя 12 внутреннего сгорания и генерирующий переменный ток; конвертер 20, соединенный с блоком генератора и преобразующий переменный ток в постоянный; инвертор 26, соединенный с конвертером и преобразующий постоянный ток в переменный, с ключевыми элементами для питания электрической нагрузки 36; управляющее устройство (ЦП 40) инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, в каждом цикле управления, определяемом несущей частотой, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты. Согласно изобретению управляющее устройство (ЦП 40, S10-S16) инвертора изменяет несущую частоту в соответствии с наклоном опорного синусоидального сигнала.
Благодаря этому, поскольку несущая частота уменьшается с удлинением цикла управления, коммутационные потери могут быть снижены на величину, соответствующую удлинению цикла управления, и становится возможным повысить эффективность генератора.
Далее, поскольку несущая частота изменяется в соответствии с наклоном опорного синусоидального сигнала, становится возможным генерировать волну выходного напряжения, максимально точно воспроизводящую форму опорного синусоидального сигнала, и подавлять нелинейные искажения.
В инверторном генераторе управляющее устройство инвертора изменяет несущую частоту таким образом, что несущая частота уменьшается с уменьшением наклона опорного синусоидального сигнала. Таким образом, становится возможным уменьшить несущую частоту для удлинения цикла управления, когда наклон мал (т.е. пологий), или увеличить несущую частоту, чтобы сделать циклы управления более короткими, когда наклон больше (т.е. круче), что позволяет надежно снизить коммутационные потери и также подавить нелинейные искажения.
Хотя, согласно изложенному выше, несущая частота изменяется в соответствии с наклоном опорного синусоидального сигнала для уменьшения количества циклов управления, необходимость уменьшать количество циклов управления отсутствует. В таком случае коммутационные потери не могут быть снижены, однако нелинейные искажения могут быть эффективно подавлены посредством уменьшения несущей частоты с уменьшением наклона опорного синусоидального сигнала.
Несмотря на то, что в приведенном выше описании в качестве ключевых элементов инвертора использованы полевые транзисторы, это не является ограничением, и вместо них возможно использование биполярных транзисторов с изолированным затвором (БТИЗ) и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ГЕНЕРАТОРОМ | 2009 |
|
RU2413353C1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2009 |
|
RU2415508C1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ГЕНЕРАТОРОМ | 2009 |
|
RU2431230C2 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ГЕНЕРАТОРОМ | 2009 |
|
RU2418357C2 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2515474C2 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ОБЕСПЕЧЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТЫ ДЛЯ ИНВЕРТОРНОГО ГЕНЕРАТОРА | 2012 |
|
RU2518905C2 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2540416C2 |
| Преобразователь постоянного напряжения в переменное программируемой формы | 1981 |
|
SU972650A1 |
| СИСТЕМА СИНУСОИДАЛЬНОЙ ПЕРЕДАЧИ И СПОСОБ ФОТОТЕРАПИИ | 2019 |
|
RU2741471C2 |
| СИСТЕМА СИНУСОИДАЛЬНОЙ ПЕРЕДАЧИ И МЕТОД ФОТОТЕРАПИИ | 2021 |
|
RU2769423C1 |
Изобретение относится к области электротехники и может быть использовано в инверторном генераторе, оснащенном блоком генератора с приводом от двигателя внутреннего сгорания, в котором цикл ШИМ-управления варьируется. Техническим результатом является устранение линейных искажения и снижение эксплуатационных характеристик. В инверторном генераторе, включающем блок электромашинного генератора, содержащем блок генератора; конвертер (20), преобразующий генерируемый переменный ток в постоянный; инвертор, преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, в каждом цикле (шаге) управления, определяемом несущей частотой, и формирует переменный ток заданной частоты, управляющее устройство инвертора изменяет несущую частоту в соответствии с наклоном (обозначенным, например, Δ 1, 2) опорного синусоидального сигнала, в частности, уменьшает несущую частоту с уменьшением наклона опорного синусоидального сигнала. 2 н. и 4 з.п. ф-лы, 6 ил.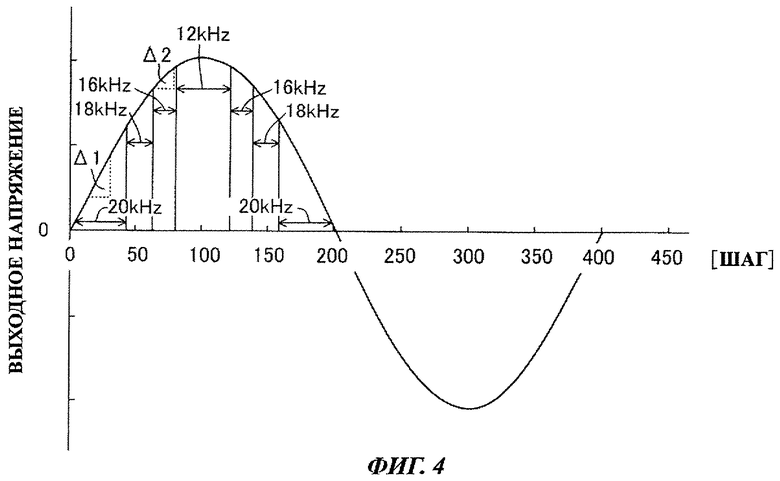
1. Инверторный генератор, содержащий блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, в каждом цикле управления, определяемом несущей частотой, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты, отличающийся тем, что управляющее устройство инвертора выполнено с возможностью изменения несущей частоты в соответствии с наклоном опорного синусоидального сигнала.
2. Инверторный генератор по п.1, отличающийся тем, что управляющее устройство инвертора выполнено с возможностью изменения несущей частоты таким образом, что несущая частота уменьшается с уменьшением наклона опорного синусоидального сигнала.
3. Инверторный генератор по п.1 или 2, отличающийся тем, что значения несущей частоты подготовлены в виде табличных данных, которые могут извлекаться по номерам циклов управления, при этом управляющее устройство инвертора рассчитывает несущую частоту, которая изменяется в соответствии с извлеченными табличными данными.
4. Способ управления инверторным генератором, содержащим блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, в каждом цикле управления, определяемом несущей частотой, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты, отличающийся тем, что несущую частоту изменяют в соответствии с наклоном опорного синусоидального сигнала.
5. Способ по п.4, отличающийся тем, что несущую частоту уменьшают с уменьшением наклона опорного синусоидального сигнала.
6. Способ по п.4 или 5, отличающийся тем, что значения несущей частоты подготавливают в виде табличных данных, которые извлекают по номерам циклов управления, при этом на шаге изменения несущей частоты рассчитывают несущую частоту, которая изменяется в соответствии с извлеченными табличными данными (S10-S16).
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С АСИНХРОННЫМ СТАРТЕР-ГЕНЕРАТОРОМ | 2004 |
|
RU2282301C2 |
| RU 2002127884 A, 20.05.2004 | |||
| US 5258700 A, 02.11.1993 | |||
| DE 321445535 A1, 27.06.1985 | |||
| JP 8079908 A, 20.03.1996 | |||
| JP 2002153096 A, 24.05.2002. | |||

