Область техники
Настоящее изобретение относится к инверторному генератору, в частности к инверторному генератору, оснащенному блоком генератора с приводом от двигателя внутреннего сгорания и выполненному с возможностью устранения из выходного значения переменного тока нелинейного гармонического искажения до предельно возможной степени.
Уровень техники
Хорошо известные инверторные генераторы вначале осуществляют преобразование переменного тока, выдаваемого блоком генератора с приводом от двигателя, в постоянный ток, после чего преобразуют постоянный ток в переменный ток заданной частоты (частоты питающей сети) посредством управления ключевыми (переключающими) элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального (гармонического) сигнала, имеющего форму волны требуемого выходного напряжения, и несущего сигнала. Пример такого инверторного генератора можно найти в опубликованной японской заявке на изобретение № Н 4 (1992)-355672 (далее - '672).
В раскрытом в данной публикации уровне техники форма сигнала выходного напряжения переменного тока приводится близкой к синусоидальному сигналу путем измерения разницы выходного напряжения в средней точке четырех ключевых элементов и регулирования в соответствии с данной разницей опорного синусоидального сигнала перед подачей его на схему широтно-импульсной модуляции для генерирования ШИМ-сигнала.
Раскрытие изобретения
Хотя вышеуказанная конфигурация в соответствии с документом '672 позволяет устранить искажения формы сигнала выходного напряжения, она не всегда позволяет осуществить адекватное уменьшение составляющих нелинейного гармонического искажения.
Таким образом, цель настоящего изобретение состоит в решении вышеуказанной проблемы путем предложения инверторного генератора, который осуществляет преобразование в переменный ток заданной частоты с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, и несущего сигнала, при этом осуществляется точное регулирование опорного синусоидального сигнала для надежного удаления составляющих нелинейного гармонического искажения из сигнала выходного напряжения.
Для достижения указанной цели, в соответствии с первым аспектом настоящего изобретения предлагается инверторный генератор, содержащий блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты. В соответствии с изобретением инверторный генератор содержит измеритель тока, измеряющий переменный ток, подаваемый на электрическую нагрузку; устройство вычисления коэффициентов усиления, которое на основании измеренного тока вычисляет коэффициенты Gn усиления (где n=2, 3, 4, 5, 6…m) n-ых гармоник опорного синусоидального сигнала; и регулятор опорного синусоидального сигнала, регулирующий опорный синусоидальный сигнал на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления.
Для достижения указанной выше цели, в соответствии со вторым аспектом настоящего изобретения предлагается способ управления инверторным генератором, содержащим блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты. В соответствии с изобретением способ включает следующие шаги: измерение переменного тока, подаваемого на электрическую нагрузку; вычисление коэффициентов Gn (где n=2, 3, 4, 5, 6…m) усиления n-ых гармоник опорного синусоидального сигнала на основании измеренного тока; и регулирование опорного синусоидального сигнала на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления.
Краткое описание чертежей
Вышеуказанные и прочие цели и преимущества настоящего изобретения более подробно объясняются в нижеследующем описании со ссылкой на сопроводительные чертежи.
На фиг.1 изображена блок-схема, показывающая общую структуру инверторного генератора в соответствии с вариантом осуществления настоящего изобретения.
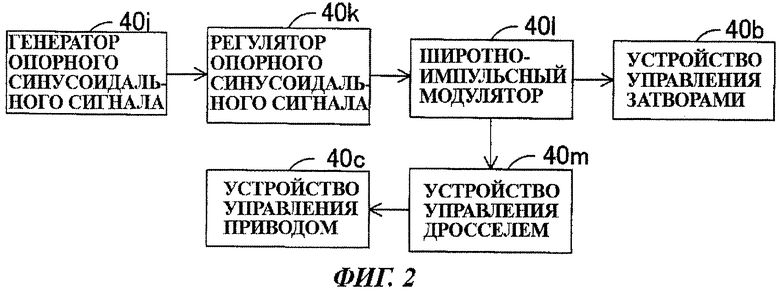
На фиг.2 изображена блок-схема, функционально показывающая работу центрального процессора, изображенного на фиг.1.
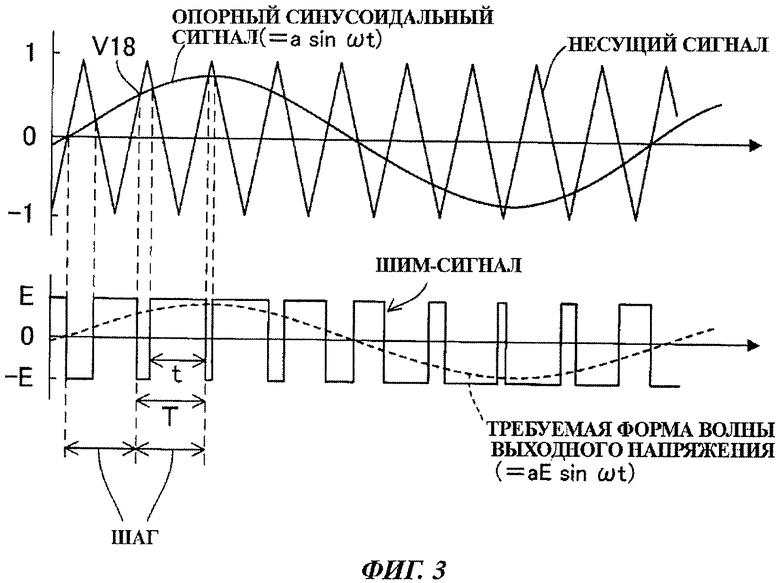
На фиг.3 представлено графическое изображение сигналов, показывающее работу генератора опорного синусоидального сигнала, представленного на фиг.2.
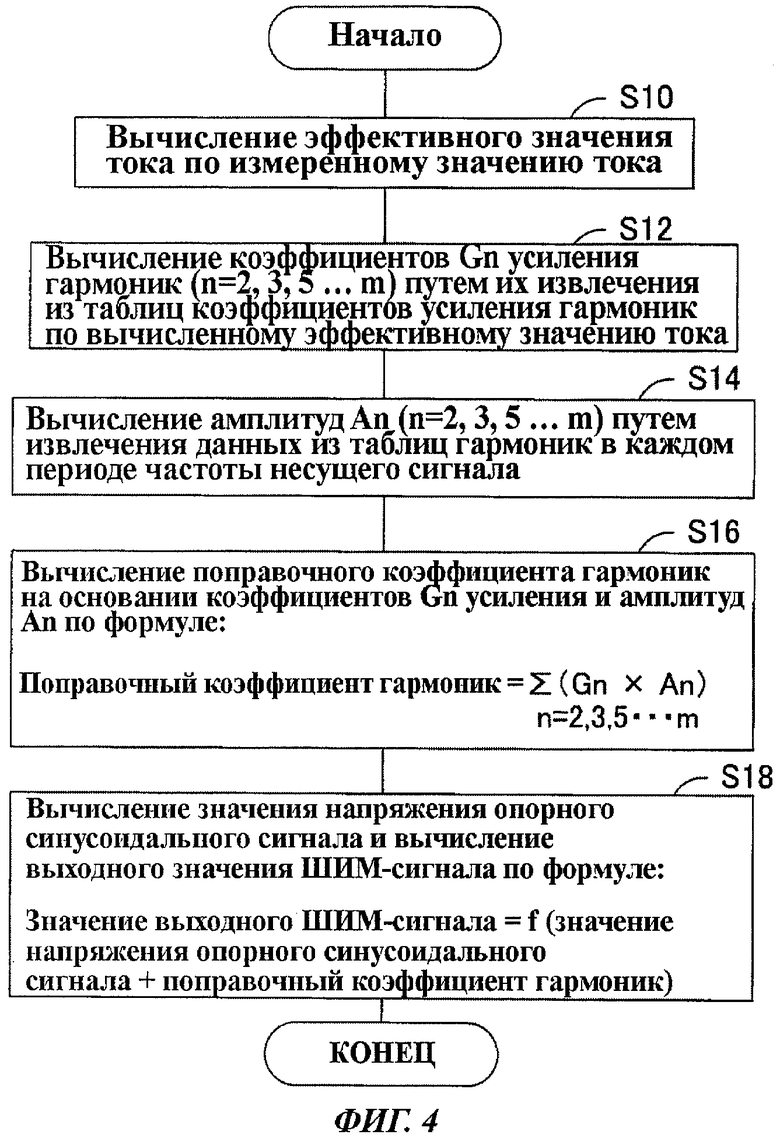
На фиг.4 изображена блок-схема, иллюстрирующая работу регулятора опорного синусоидального сигнала, представленного на фиг.2.
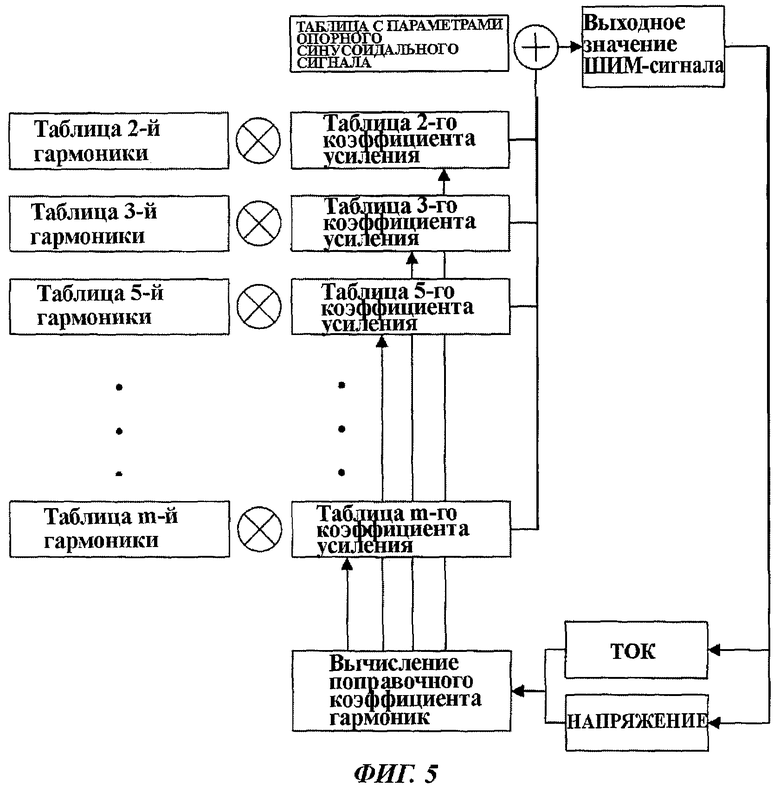
На фиг.5 изображена блок-схема, иллюстрирующая устройство регулятора опорного синусоидального сигнала, представленного на фиг.2, для объяснения процесса, представленного блок-схемой на фиг.4.
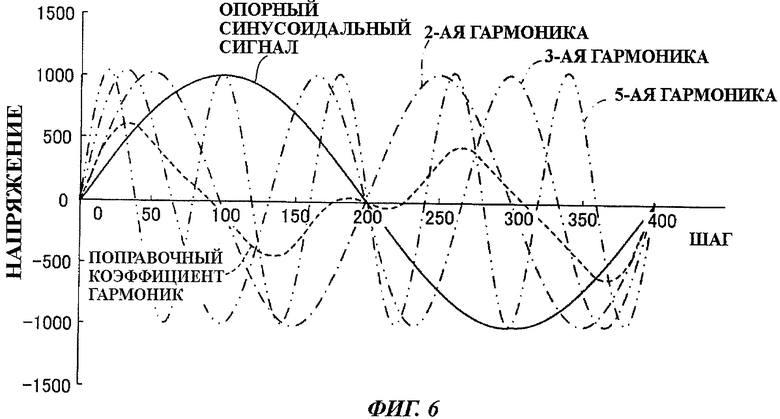
На фиг.6 представлено графическое изображение сигналов, показывающее, в частности, опорный синусоидальный сигнал, сгенерированный генератором опорного синусоидального сигнала, представленным на фиг.2.
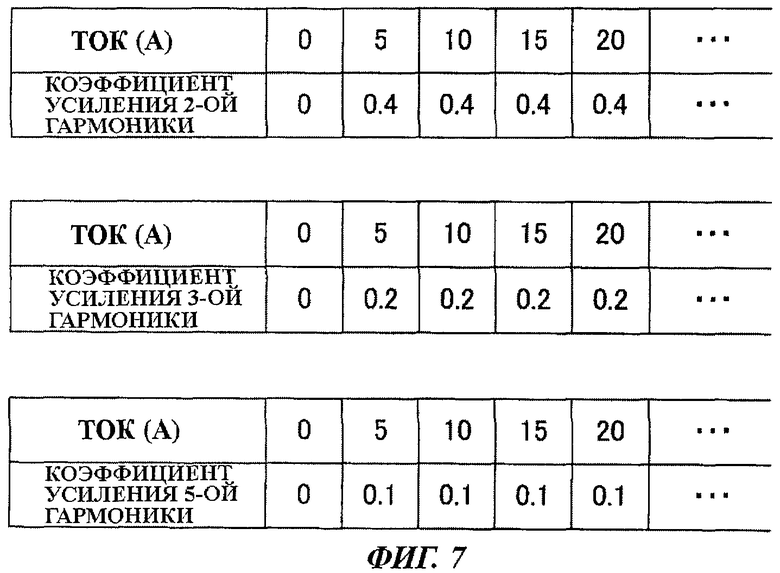
На фиг.7 представлена пояснительная иллюстрация, показывающая табличные значения коэффициентов усиления амплитуд гармоник, используемые в приведенной на фиг.4 блок-схеме.
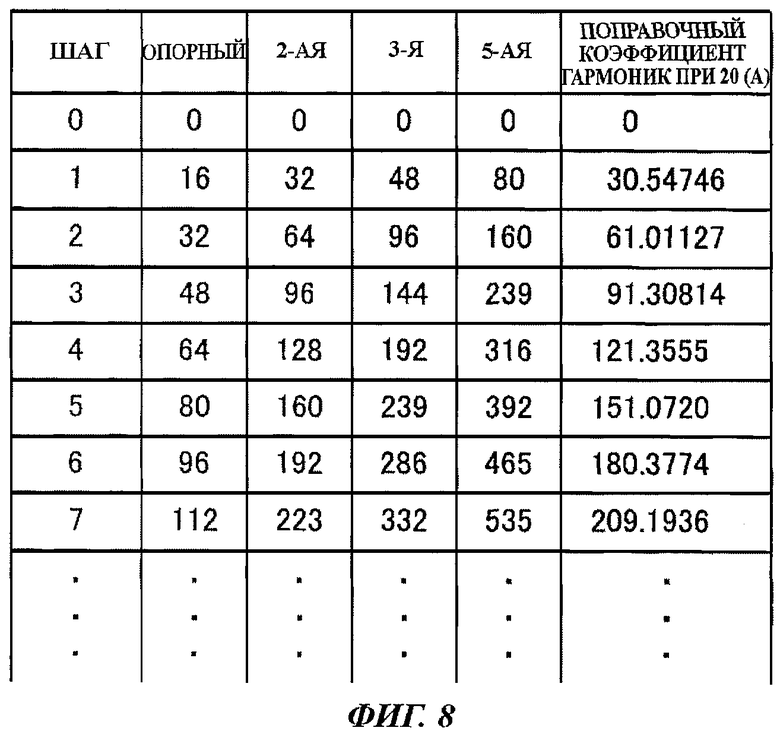
На фиг.8 представлена пояснительная иллюстрация, показывающая элементы поправочных коэффициентов гармоник, вычисленные в соответствии с приведенной на фиг.4 блок-схемой.
Осуществление изобретения
Инверторный генератор в соответствии с вариантом осуществления настоящего изобретения далее описывается более подробно со ссылкой на сопроводительные чертежи.
На фиг.1 представлена блок-схема, показывающая общую структуру инверторного генератора в соответствии с вариантом осуществления настоящего изобретения.
Инверторный генератор обозначен поз.10 на фиг.1. Генератор 10 оснащен двигателем (двигателем внутреннего сгорания) 12 и имеет номинальную выходную мощность около 3 кВт (100 В, 30 А переменного тока). Двигатель 12 представляет собой двигатель с воздушным охлаждением и искровым зажиганием. Его дроссель 12а открывается и закрывается приводом (актюатором) 12b дросселя, представляющим собой шаговый двигатель. Двигатель 12 запускается ручным стартером (не показан).
Круговой статор (не показан) закреплен вблизи от головки блока цилиндров двигателя 12. Статор снабжен обмотками, образующими блок 14 электромашинного генератора, а именно трехфазными (U, V и W) выходными обмотками (главными обмотками) 14а и тремя однофазными обмотками 14b, 14с и 14d.
Ротор (не показан), выполненный в виде маховика двигателя 12, установлен снаружи статора. В роторе напротив вышеупомянутых обмоток 14а и т.д. установлены постоянные магниты (не показаны) с чередованием радиальной полярности их полюсов.
При вращении постоянных магнитов ротора, окружающего статор, на выходе трехфазных выходных обмоток 14а создается (генерируется) трехфазный (U, V и W фазы) переменный ток, а на выходе однофазных выходных обмоток 14b, 14с и 14d возникает однофазный переменный ток.
Трехфазный переменный ток, создаваемый (генерируемый) выходными обмотками 14а блока 14 генератора, поступает через клеммы 14е (U, V и W) на плату 16 управления (печатную плату) и подается в установленный на ней конвертор 20. Конвертор 20 содержит соединенные по мостовой схеме три тиристора SCR (silicon-controlled rectifier, однооперационный триодный тиристор) и три диода DI. Трехфазный переменный ток, создаваемый на выходе блока 14 генератора, преобразуется в постоянный ток посредством управления включением или углами проводимости тиристоров. Источник питания 22 с дроссельным преобразователем RCC (ringing choke converter, преобразователь с переходными процессами в дросселе) (стабилизированный источник питания постоянного тока) соединен с боковыми положительным и отрицательным электрическими выводами конвертора 20 и подает выпрямленное напряжение постоянного тока в качестве рабочего напряжения питания на три тиристора. После RCC-источника питания 22 в цепь включен сглаживающий конденсатор 24 для сглаживания постоянного тока на выходе конвертера 20.
Инвертор 26 включен в цепь после сглаживающего конденсатора 24. Инвертор 26 имеет мостовую схему с четырьмя полевыми транзисторами (ключевыми элементами). Как объяснено ниже, постоянный ток на выходе конвертера 20 преобразуется в переменный ток заданной частоты (50 Гц или 60 Гц частоты питающей сети) посредством управления состоянием проводимости (ОТКРЫТ-ЗАКРЫТ) четырех полевых транзисторов.
Выходной сигнал инвертора 26 проходит через дроссель 30, состоящий из LC-фильтра для подавления гармоник, и через фильтр шумов 32 для подавления помех и подается на выходные клеммы 34, с которых он может быть подан на электрическую нагрузку 36 через соединительный проводник (не показан) или аналогичный элемент.
Плата 16 управления оснащена центральным процессором (ЦП) 40 с 32-битной архитектурой. ЦП 40 управляет углом включения тиристоров конвертера 20 с помощью тиристорного (SCR) управляющего устройства (схемы управления) 40а, включением и выключением полевых транзисторов инвертора 26 с помощью устройства управления 40b затворами, а также работой привода 12b дросселя с помощью устройства управления 40 с приводом. ЦП 40 оснащен устройством памяти EEPROM (ЭСППЗУ, электрически-стираемое программируемое постоянное запоминающее устройство) (энергонезависимым ЗУ) 40а.
Выходной сигнал первой однофазной выходной обмотки 14b подается на плату управления 16 через клеммы 14b1 и 14b2, а с нее - на генератор 14b3 управляющего напряжения, который генерирует рабочее напряжение питания 5 В для ЦП 40. Выходной сигнал с клеммы 14b1 подается на схему 14b4 измерения оборотов, где он преобразуется в импульсный сигнал и подается на ЦП 40. ЦП 40 подсчитывает импульсы выходного сигнала схемы 14b4 измерения оборотов для вычисления (измерения) скорости вращения двигателя 12.
Выходной сигнал второй однофазной выходной обмотки 14с подается на схему двухполупериодного выпрямителя 14с1, где осуществляется его двухполупериодное выпрямление для формирования рабочего напряжения питания для привода 12b дросселя и других устройств. Выходной сигнал третьей выходной обмотки 14d подается на схему 12с зажигания двигателя 12 для использования в качестве напряжения питания свечи 12d зажигания.
ЦП 40 соединен с первым и вторым датчиками напряжения 40е и 40f. Первый датчик напряжения 40е, включенный после RCC-источника питания 22, генерирует выходной сигнал, пропорциональный выходному напряжению постоянного тока конвертера 20. Второй датчик напряжения 40f, включенный после инвертора 26, генерирует выходной сигнал, пропорциональный выходному напряжению переменного тока инвертора 26. Выходные сигналы первого и второго датчиков напряжения 40е и 40f подаются на ЦП 40.
ЦП 40 также соединен с датчиком тока 40g. Датчик тока 40g генерирует выходной сигнал, пропорциональный значению тока на выходе инвертора 26, т.е. тока, проходящего через электрическую нагрузку 36, когда нагрузка 36 подключена.
Выходной сигнал датчика тока 40g подается в ЦП 40, а также в ограничитель сверхтока 40П. Когда ток, измеренный датчиком тока 40g, превышает предельно допустимое значение, ограничитель сверхтока 40П отключает выходной сигнал устройства 40b управления затворами для временного обнуления выходного сигнала инвертора 26.
На фиг.2 изображена блок-схема, функционально показывающая работу центрального процессора 40.
Как показано на фиг.2, центральный процессор 40 оснащен генератором 40j опорного синусоидального сигнала, регулятором 40k опорного синусоидального сигнала, широтно-импульсным модулятором 40l и устройством 40m управления дросселем.
На фиг.3 представлено графическое изображение сигналов, показывающее работу генератора опорного синусоидального сигнала, представленного на фиг.2.
Как показано на фиг.3, генератор 40j опорного синусоидального сигнала формирует опорный синусоидальный сигнал (сигнальную волну; сигнал, изображенный верхней сплошной линией) заданной частоты (т.е. 50 или 60 Гц частоты питающей сети), имеющий форму волны требуемого выходного напряжения. Как более подробно разъяснено ниже, регулятор 40k опорного синусоидального сигнала корректирует синусоидальный сигнал, сформированный генератором 40j опорного синусоидального сигнала.
Как также показано на фиг.3, на вход широтно-импульсного модулятора 40l подается опорный синусоидальный сигнал, сформированный генератором 40j опорного синусоидального сигнала или откорректированный регулятором 40k опорного синусоидального сигнала; он использует компаратор (не показан) для сравнения опорного сигнала с несущим сигналом (например, с несущей волной частотой 20 кГц), и формирует ШИМ-сигнал (сигнал ШИМ-формы), а именно последовательность импульсов с переменным коэффициентом заполнения (отношения длительности t импульса к периоду Т его следования), в соответствии с принципом ШИМ (широтно-импульсной модуляции).
Волна, изображенная нижней пунктирной линией на фиг.3, показывает требуемую форму волны выходного напряжения. Период Т (шаг) ШИМ-сигнала (сигнала ШИМ-формы), в действительности является значительно более коротким, чем это показано на фиг.3, где он увеличен с целью облегчения понимания.
Устройство 40m управления дросселем управляет открытием дроссельной заслонки 12а для установления требуемой частоты вращения двигателя, рассчитанной на основании значения выходного переменного тока, определяемого электрической нагрузкой 36, рассчитывает выходные импульсы фазы А и фазы В для привода дросселя, представляющего собой шаговый двигатель 12b, и подает их через устройство 40с управления приводом на привод 12b дросселя с выходных клемм 40с1, тем самым управляя работой привода 12b дросселя.
Ниже приводится объяснение работы центрального процессора 40, в частности, работы регулятора 40k опорного синусоидального сигнала и широтно-импульсного модулятора 40l.
На фиг.4 изображена блок-схема, иллюстрирующая эти операции. Приведенная программа выполняется в заданные моменты времени, например, каждые 50 мкс для случая, когда частота сигнала выходного напряжения составляет 50 Гц.
Программа начинается на шаге S10, на котором вычисляется эффективное значение тока, измеренное датчиком тока 40g, т.е. среднеквадратичное значение измеренного датчиком значения (мгновенного значения).
Далее программа переходит к шагу S12, на котором вычисленное эффективное значение тока используется для вычисления коэффициентов Gn усиления (где n=2, 3, 5…m) гармоник путем извлечения данных из таблиц, содержащих значения коэффициентов усиления гармоник, после чего программа переходит к шагу S14, на котором вычисляются (извлекаются) амплитуды An (где n=2, 3, 5…m) из таблиц гармоник в каждом периоде частоты несущего сигнала (20 кГц) (фиг.3), и далее - к шагу S16, на котором с использованием арифметического выражения, представленного на фиг.4, на основании вычисленных коэффициентов Gn усиления и амплитуд An вычисляется поправочный коэффициент гармоник. Следует отметить, что находящиеся среди 2-ой, 3-ей, 4-ой, 5-ой, 6-ой, … высших гармоник, 2-ая, 3-я, 5-ая гармоники использованы только в качестве примера.
На фиг.5 изображена блок-схема, иллюстрирующая устройство регулятора опорного синусоидального сигнала для объяснения процесса, представленного блок-схемой на фиг.4.
Как можно видеть, регулятор 40k опорного синусоидального сигнала содержит таблицу с параметрами опорного синусоидального сигнала, таблицы n-ых гармоник, т.е. таблицы 2-ой, 3-ей, 5-ой и далее до m-ой гармоник, и таблицы, содержащие коэффициенты усиления гармоник, связанные с таблицами параметров гармоник. Таблица параметров опорного синусоидального сигнала и все остальные таблицы хранятся в ЭСППЗУ 40d.
Как показано на фиг.6, данные в таблице опорного синусоидального сигнала сохранены для каждого заданного интервала времени для каждой из двух частот опорного синусоидального сигнала (50 и 60 Гц частоты питания сети), т.е. они хранятся с разбиением на 400 периодов (моментов времени). При рассмотрении фиг.6 следует отметить, что амплитуда (максимальное значение) выходного напряжения для удобства расчетов представлена равной 1024, т.е. как 2 в десятой степени (128 байт).
Подобным образом, как показано на фиг.6, амплитуды An (где n=2, 3, 5…m) соответствующих гармоник хранятся в таблицах 2-ой, 3-ей, 5-ой и до m-ой гармоник с разбиением на 400 шагов. Для облегчения понимания гармоники показаны, как имеющие ту же самую амплитуду, как и опорный синусоидальный сигнал.
Как показано на фиг.7, коэффициенты Gn усиления (где n=2, 3, 5…m) хранятся во 2-ой, 3-ей, 5-ой и до m-ой таблицах коэффициентов усиления как значения, которые могут быть найдены по значению тока (А), а точнее, вычисленному эффективному значению (А) тока. Коэффициент усиления представлен как дробная часть (процентная величина) от амплитуды (абсолютного значения) гармоники.
Следовательно, для извлечения данных из таблиц коэффициентов усиления и прочих таблиц в процессе работы алгоритма от шага S12 до шага S16 используется вычисленное эффективное значение тока, а амплитуды An, соответствующие периоду, связанному с моментом выполнения алгоритма, представленного блок-схемой на фиг.4, извлекаются из таблиц гармоник и других таблиц. Далее, как показано ниже, из найденных коэффициентов Gn усиления и амплитуд An вычисляется поправочный коэффициент гармоник в соответствии с указанным арифметическим выражением:
Поправочный коэффициент гармоник = А2×G2+A3×G3+А5×G5+…+Am×Gm.
Значения поправочного коэффициента 2-й, 3-й и 5-й гармоник показаны на фиг.8. На фиг.6 показана форма сигнала поправочного коэффициента гармоник, если он рассчитывается непрерывно для одного периода опорного синусоидального сигнала.
Возвращаясь к объяснению блок-схемы, показанной на фиг.4, отметим, что далее программа переходит к шагу S18, на котором вычисляется значение напряжения опорного синусоидального сигнала, например, значение, обозначенное как V18 на фиг.3, и с помощью указанного арифметического выражения вычисляется сумма значения напряжения опорного синусоидального сигнала и поправочного коэффициента гармоник, а на основании полученной таким образом суммы вычисляется выходное значение широтно-импульсной модуляции (ШИМ-сигнала).
Таким образом, получается значение напряжения опорного синусоидального сигнала, соответствующее периоду, связанному с моментом выполнения алгоритма, представленного блок-схемой на фиг.4, и сумма, полученная путем сложения полученного значения и поправочного коэффициента гармоник (произведения вычисленных амплитуд An гармоник и коэффициентов Gn усиления гармоник), используется для регулирования опорного синусоидального сигнала (значения его напряжения). Вплоть до этого этапа процедура обработки производится регулятором 40k опорного синусоидального сигнала.
Далее значение напряжения опорного синусоидального сигнала, откорректированное регулятором 40k опорного синусоидального сигнала (сумма значения напряжения опорного синусоидального сигнала и поправочного коэффициента гармоник) принимается широтно-импульсным модулятором 40l, который сравнивает его с несущим сигналом с использованием компаратора и вычисляет (формирует) значение выходного сигнала широтно-импульсной модуляции (ШИМ-сигнал или волну ШИМ-формы).
Вычисленное значение выходного ШИМ-сигнала подается через устройство управления 40b затворами на мостовую схему из полевых транзисторов, показанную на фиг.1, и осуществляется управление включением или выключением четырех полевых транзисторов для вывода с выходных клемм 34 переменного тока заданной частоты 50 Гц (или 60 Гц) для питания электрической нагрузки 36 в соответствии с необходимостью.
Данный процесс объясняется со ссылкой на фиг.6. При вычислении ШИМ-сигнала с использованием компаратора для сравнения опорного синусоидального сигнала, сходного с изображенным, с несущим сигналом, полученная таким образом форма сигнала выходного напряжения должна иметь форму волны, которая, подобно опорному синусоидальному сигналу, не имеет искажения, как показано пунктирной кривой на фиг.3.
Тем не менее, в действительности форма сигнала выходного напряжения обычно отклоняется от требуемой формы опорного синусоидального сигнала вследствие запаздывания во времени, температуры и других факторов в процессе управления полевыми транзисторами, и в результате этого имеют место гармоники, подобные тем, которые показаны на фиг.6.
По этой причине, в данном варианте осуществления используется автономный компьютер для осуществления преобразования Фурье над гармониками, производимое в отношении формы напряжения опорного синусоидального сигнала, показанного на фиг.6, в зависимости от тока, проходящего через электрическую нагрузку 36, для проведения частотного анализа; значения амплитуд и коэффициентов усиления заранее генерируются на основании аналитических результатов, и сгенерированные данные подготавливаются в виде табличных данных, которые могут быть использованы для определения указанных значений по значению тока.
Среди этих данных коэффициенты Gn усиления вычисляются исходя из условия гашения гармоник. Более конкретно, если амплитуда А2 второй гармоники возникает на положительной полуволне, то коэффициент G2 усиления вычисляется на отрицательной полуволне для гашения амплитуды А2, и если амплитуда A3 третьей гармоники имеет место на отрицательной полуволне, то коэффициент G3 усиления вычисляется на положительной полуволне для гашения амплитуды A3. После этого опорный синусоидальный сигнал (значение его напряжения) корректируется с помощью поправочного коэффициента гармоник, полученного путем суммирования произведений амплитуд An и коэффициентов Gn усиления гармоник.
Вышеуказанная конфигурация рассматриваемого варианта осуществления предоставляет возможность точного регулирования опорного синусоидального сигнала. В результате этого, из сигнала выходного напряжения могут быть надежным образом удалены компоненты нелинейного искажения с помощью генерирования ШИМ-сигнала с использованием откорректированного опорного синусоидального сигнала.
Для хранения коэффициентов усиления n-х гармоник опорного синусоидального сигнала в качестве табличных значений имеется запоминающее устройство (ЭСППЗУ) 40d, и коэффициенты Gn усиления вычисляются путем их извлечения из таблиц с использованием измеренного значения тока. Таким образом, дополнительно к обеспечению вышеназванных преимуществ, данная конфигурация, кроме того, позволяет быстрое и простое вычисление коэффициентов Gn усиления.
В соответствии с изложенным выше данный вариант осуществления предусматривает инверторный генератор 10 (и способ управления инверторным генератором 10), содержащий блок 14 генератора, приводимый от двигателя 12 внутреннего сгорания и генерирующий переменный ток, конвертер 20, соединенный с блоком 14 генератора и преобразующий переменный ток в постоянный ток, инвертор 26, соединенный с конвертером 20 и преобразующий постоянный ток в переменный ток, снабженный ключевыми элементами для питания электрической нагрузки 36, управляющее устройство инвертора (центральный процессор 40), которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты. Отличительными особенностями предлагаемого инверторного генератора является то, что он содержит измеритель тока (центральный процессор 40, датчик 40g тока, шаг S10), измеряющий переменный ток, подаваемый на электрическую нагрузку 36; устройство вычисления коэффициентов усиления (центральный процессор 40, шаг S12), которое на основании измеренного тока вычисляет коэффициенты Gn усиления (где n=2, 3, 4, 5, 6…m) n-ых гармоник опорного синусоидального сигнала; и регулятор опорного синусоидального сигнала (центральный процессор 40, регулятор 40k опорного синусоидального сигнала, шаги S14-S18), регулирующий опорный синусоидальный сигнал на величину суммы (поправочный коэффициент гармоник), полученной на основании вычисленных коэффициентов Gn усиления.
В инверторном генераторе коэффициенты Gn усиления подготовлены в виде табличных данных (хранятся в памяти (ЭСППЗУ 40d)), и устройство вычисления коэффициентов усиления вычисляет коэффициенты Gn усиления путем их извлечения из табличных данных на основании измеренного тока (шаг S12).
В инверторном генераторе устройство вычисления коэффициентов усиления вычисляет амплитуды An (где n=2, 3, 4, 5, 6, … m) n-ых гармоник опорного синусоидального сигнала, а регулятор опорного синусоидального сигнала регулирует опорный синусоидальный сигнал на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления и амплитуд An (шаг S14).
В инверторном генераторе амплитуды An подготовлены в виде табличных данных совместно с коэффициентами Gn усиления, и устройство вычисления коэффициентов усиления вычисляет амплитуды An путем их извлечения из табличных данных (шаги S12, S14).
В инверторном генераторе измеритель тока измеряет ток как эффективное значение на основании измеренного значения, полученного датчиком (40g) тока.
Несмотря на то, в приведенном выше описании в качестве переключающих элементов инвертора использованы полевые транзисторы, это не является ограничением, и вместо них могут быть использованы биполярные транзисторы с изолированным затвором (БТИЗ) и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ГЕНЕРАТОРОМ | 2009 |
|
RU2418357C2 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ГЕНЕРАТОРОМ | 2009 |
|
RU2406216C1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ГЕНЕРАТОРОМ | 2009 |
|
RU2413353C1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2009 |
|
RU2415508C1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2515474C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ В СОСТАВЕ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА В РЕЖИМАХ ПЕРЕГРУЗКИ | 2011 |
|
RU2509336C2 |
| Функциональный генератор | 1987 |
|
SU1587549A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ В СОСТАВЕ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2517298C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫХОДНЫМ НАПРЯЖЕНИЕМ ЭЛЕКТРОГЕНЕРАТОРА | 2010 |
|
RU2472285C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
Изобретение относится к инверторному генератору, в частности к инверторному генератору, оснащенному блоком генератора с приводом двигателя внутреннего сгорания и выполненному с возможностью устранения из выходного значения переменного тока нелинейного гармонического искажения до предельно допустимой степени. Технический результат - преобразование в переменный ток заданной частоты с помощью ШИМ-сигнала и регулирование опорного синусоидального сигнала для надежного удаления составляющих нелинейного гармонического искажения из сигнала выходного напряжения. В заявленное изобретение, содержащее блок электромашинного генератора, генерирующий переменный ток; конвертер, преобразующий переменный ток в постоянный; инвертор, преобразующий постоянный ток в переменный, управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, введены измеритель тока для измерения переменного тока, подаваемого на электрическую нагрузку; устройство вычисления коэффициентов усиления для вычисления, на основании измеренного тока, коэффициентов Gn усиления (где n=2, 3, 4, 5, 6…m) n-ых гармоник опорного синусоидального сигнала; и регулятор опорного синусоидального сигнала, регулирующий опорный синусоидальный сигнал на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления. Второй вариант - содержит блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный ток; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, в заявленном изобретении осуществляют измерение переменного тока, подаваемого на электрическую нагрузку; вычисление коэффициентов Gn усиления (где n=2, 3, 4, 5, 6…m) n-ых гармоник опорного синусоидального сигнала; регулирование опорного синусоидального сигнала на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления. 2 н. и 8 з.п. ф-лы, 8 ил.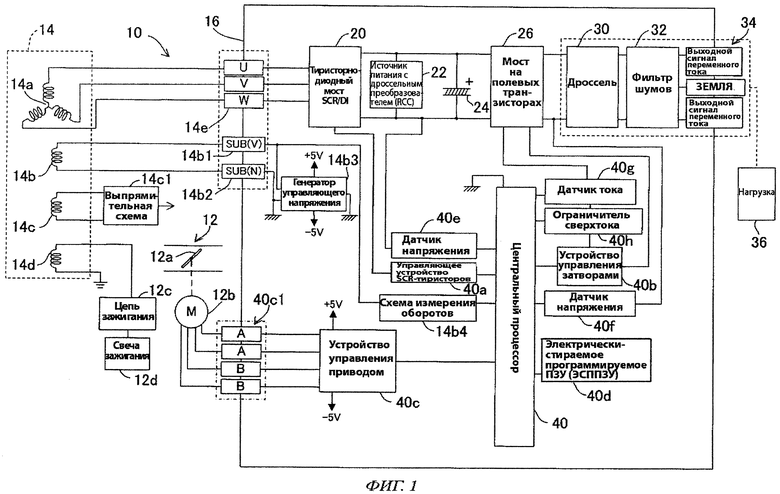
1. Инверторный генератор, содержащий блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток; конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный ток; инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный ток, снабженный ключевыми элементами для питания электрической нагрузки; управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты, отличающийся тем, что содержит измеритель тока для измерения переменного тока, подаваемого на электрическую нагрузку; устройство вычисления коэффициентов усиления для вычисления, на основании измеренного тока, коэффициентов Gn усиления (где n=2, 3, 4, 5, 6…m) n-х гармоник опорного синусоидального сигнала; и регулятор опорного синусоидального сигнала, регулирующий опорный синусоидальный сигнал на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления.
2. Инверторный генератор по п.1, отличающийся тем, что коэффициенты Gn усиления подготовлены в виде табличных данных, а устройство вычисления коэффициентов усиления вычисляет коэффициенты Gn усиления путем их извлечения из табличных данных на основании измеренного тока.
3. Инверторный генератор по п.1 или 2, отличающийся тем, что устройство вычисления коэффициентов усиления вычисляет амплитуды An (где n=2, 3, 4, 5, 6…m) n-х гармоник опорного синусоидального сигнала, а регулятор опорного синусоидального сигнала регулирует опорный синусоидальный сигнал на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления и амплитуд An.
4. Инверторный генератор по п.3, отличающийся тем, что амплитуды An подготовлены в виде табличных данных совместно с коэффициентами Gn усиления, а устройство вычисления коэффициентов усиления вычисляет амплитуды An путем их извлечения из табличных данных.
5. Инверторный генератор по п.1 или 2, отличающийся тем, что измеритель тока измеряет ток как эффективное значение на основании измеренного значения, полученного датчиком тока.
6. Способ управления инверторным генератором, содержащим блок генератора, приводимый от двигателя внутреннего сгорания и генерирующий переменный ток, конвертер, соединенный с блоком генератора и преобразующий переменный ток в постоянный ток, инвертор, соединенный с конвертером и преобразующий постоянный ток в переменный ток, снабженный ключевыми элементами для питания электрической нагрузки, управляющее устройство инвертора, которое управляет ключевыми элементами с помощью ШИМ-сигнала, генерируемого с использованием опорного синусоидального сигнала, имеющего форму волны требуемого выходного напряжения, а также несущего сигнала, и преобразует переменный ток, преобразованный в инверторе, в переменный ток заданной частоты, отличающийся тем, что включает следующие шаги: измерение переменного тока, подаваемого на электрическую нагрузку; вычисление на основании измеренного тока коэффициентов Gn усиления (где n=2, 3, 4, 5, 6…m) n-х гармоник опорного синусоидального сигнала; регулирование опорного синусоидального сигнала на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления.
7. Способ по п.6, отличающийся тем, что коэффициенты Gn усиления подготавливают в виде табличных данных, а на шаге вычисления коэффициента Gn усиления вычисляют коэффициенты Gn усиления путем их извлечения из табличных данных на основании измеренного тока.
8. Способ по п.6 или 7, отличающийся тем, что на шаге вычисления коэффициентов усиления вычисляют амплитуды An (где n=2, 3, 4, 5, 6…m) n-х гармоник опорного синусоидального сигнала, и регулируют посредством регулятора опорного синусоидального сигнала опорный синусоидальный сигнал на величину суммы, полученной на основании вычисленных коэффициентов Gn усиления и амплитуд An.
9. Способ по п.8, отличающийся тем, что амплитуды An подготавливают в виде табличных данных совместно с коэффициентами Gn усиления, а на шаге вычисления коэффициентов усиления вычисляют амплитуды An путем их извлечения из табличных данных.
10. Способ по п.6 или 7, отличающийся тем, что на шаге измерения тока измеряют ток как эффективное значение на основании измеренного значения, полученного датчиком тока.
| JP 11308896 А, 05.11.1999 | |||
| US 4977492 А, 11.12.1990 | |||
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2314940C1 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА С АСИНХРОННЫМ СТАРТЕРОМ-ГЕНЕРАТОРОМ | 1997 |
|
RU2173020C2 |
| Способ регулирования напряжения тягового генератора тепловоза | 1980 |
|
SU925693A1 |

