Изобретение относится медицине, а именно к способам и устройствам диагностики двигательных функций человека, и может быть использовано для исследования двигательных функций человека и диагностики моторных патологий в физиотерапии, мануальной терапии, спортивной медицине, стоматологии, неврологии, в лечебно-профилактических учреждениях неврологического профиля, психофизиологических лабораториях, педагогике, спортивной медицине, при профессиональном отборе операторов и т.д.
Известен способ диагностики двигательных функций человека и устройство для его реализации, позволяющее регистрировать траектории совместного движения обоих глаз, головы и руки при тесте на скачкообразно предъявляемые зрительные стимулы. Измеряют латентные периоды, длительности, максимальные скорости и количество множественных саккадических движений глаз, головы и руки. Затем измеряют разность латентных периодов, длительностей и количества множественных саккадических движений глаз, а также отношение их максимальных скоростей. Полученные характеристики сравнивают с эталонной нормой и диагностируют двигательные функции. Кроме того, дополнительно исследуют двусторонне направленные координированные движения глаз, головы и руки и по их соотношению диагностируют координацию двигательных функций.
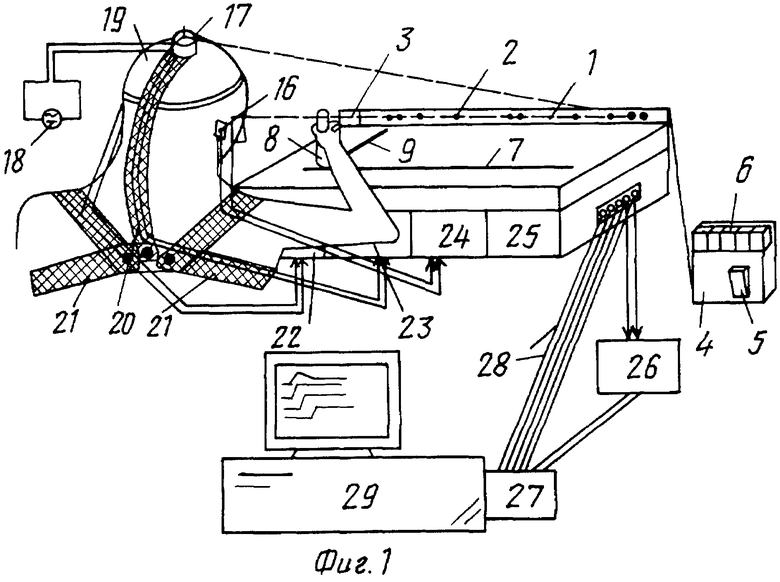
Устройство для реализации способа представлено на Фиг.1 и включает в себя блок предъявления зрительных стимулов (1) с мишенями-светодиодами (2), подключенный к источнику питания (26) и пульту (4) с кнопками управления светодиодами (5), блок регистрации движения руки с пазом (9, 7), по которому свободно перемещается подвижная рукоять (8) с указателем. Рукоять жестко соединена с двумя подвижными шкивами, а соосно с одним из шкивов закреплен угловой потенциометр (3), соединенный с источником питания (18). Устройство имеет датчик углового положения глаза (16), датчик углового положения головы (20), соединенный с источником питания (18) и закрепленный на шлеме (19), присоединенном к туловищу стальной лентой и ремнями, блок усилителей (17), состоящий из усилителя окулографического сигнала (23), усилителя сигнала (22), поступающего с датчика положения головы (20), и усилителя сигнала, поступающего с блока регистрации движения руки (21), аналого-цифровой преобразовать (27), входы которого соединены с выходами усилителей, а выходы - с электронной вычислительной машиной (29) с набором программ обработки. В устройство введены дополнительный датчик углового положения глаза (16), связанный с ним усилитель окулографического сигнала (24), блок связи, состоящий из дифференциального усилителя, входы (28) которого соединены с выходами усилителей окулографического сигнала, и дополнительный канал аналого-цифрового преобразователя (27), вход которого соединен с выходом дифференциального усилителя (25). В блок предъявления зрительных стимулов (6) включено 5 дополнительных светодиодов, а на пульте управления установлен реверсивный переключатель (5), предназначенный для скачкообразного предъявления левонаправленного зрительного стимула на те же углы взора испытуемого, что и для правонаправленного (патент №2146494 МПК7 А61В 5/103, РФ. Способ диагностики двигательных функций человека и устройство для его реализации. Базиян.Б.Х, Дмитриев И.Э. Бюл. 2000.
Это устройство выбрано за прототип).
Данное устройство не позволяет получить данные о координатах расположения изучаемого объекта, траектории и скорости его передвижения в пространстве. Кроме того, представленное устройство не имеет возможности трансформации для изучения угловых координат другого биологического объекта.
Задачей изобретения является создание нового принципа регистрации угловых координат объекта, создание универсального диагностического прибора, позволяющего регистрировать угловые координаты биологического объекта, увеличить точность их измерения, унифицировать (упрощение) конструкцию и технологию изготовления устройства для его реализации.
Способ регистрации угловых координат точечного объекта заключается в том, что на объект фиксируется один или несколько точечных источников света, включаемых поочередно. Световой поток, который проходит через щелевую диафрагму в устройстве регистратора и засвечивает участок световоспринимающей линейной матрицы. Щелевая диафрагма обеспечивает роль оптического шарнира системы. Световоспринимающая линейная матрица регистрирует зону засветки, которая зависит от взаиморасположения источника света, щелевой диафрагмы и световоспринимающей пластины. Информация об угловых координатах источника света рассчитывается из известных координат щелевой диафрагмы относительно световоспринимающей матрицы и зоны засветки. Система из световоспринимающей матрицы и щелевой диафрагмы образует оптическую сенсорную систему определения угловых координат точечного объекта в одной плоскости. С помощью трех и более оптических сенсорных систем бесконтактно и дистанционно регистрируются координаты точечного объекта в пространстве. Для увеличения точности определения координат применяются средства компенсации фоновой засветки световоспринимающей линейной матрицы.
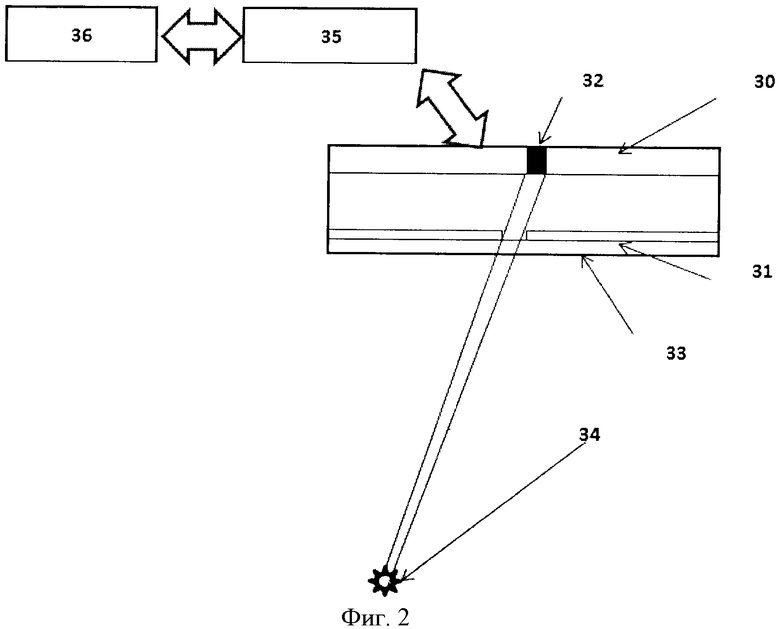
Регистрационное устройство (Фиг.2), позволяющее реализовать данный принцип определения угловых координат объекта, содержит светочувствительную линейную матрицу (30), корпус устройства со встроенной щелевой диафрагмой (31), светофильтр (33), электронный блок обработки информации (36), точечный источник света (34), преобразователь сигнала со светочувствительной матрицы в цифровой код (35).
Алгоритм работы: регистрируется фоновая засветка светочувствительной матрицы в момент выключенного точечного источника света, данные о базовой засветке сохраняются в памяти электронного блока обработки информации (36), после чего включается точечный источник света (34), световой поток от источника света регистрируется на линейной светочувствительной матрице (30), пройдя через светофильтр (33) и щелевую диафрагму (31), в зависимости от расположения точечного источника (34) относительно плоскости расположения сенсорной системы засвечивается тот или иной участок (32) светочувствительной матрицы (30), из матрицы данные поступают в цифровой преобразователь сигнала, далее данные поступают в блок обработки информации (36), где производится компенсирование данных фоновой засветки и определение угла расположения точечного объекта относительно плоскости сенсорной системы. Вычисленные угловые координаты передаются во внешние устройства обработки информации.
Преимуществами предлагаемого способа регистрации угловых координат точечного объекта являются возможность бесконтактно и дистанционно регистрации угловых координат точечного объекта, а также с помощью трех и более оптических сенсорных систем вычислять координаты точечного объекта в относительной системе координат сенсоров. Система работает на алгоритме компенсации фоновой засветки, управление компенсацией осуществляется за счет синхронизатора, что позволяет системе динамически адаптироваться под изменения состояния фоновой засветки. Дополнительно для улучшения компенсации фоновой засветки используется светофильтр, настроенный на длину волны светового маркера. Предлагаемое устройство принципиально и существенно упростит схему прибора, увеличит стабильность, надежность работы комплекса.
Предлагаемое устройство позволяет определить угловые координаты биологического объекта с точностью до 10 мкм, регистрировать траекторию его перемещения и определять ряд объективных параметров его перемещения (траекторию, длину пути, скорость перемещения, время перемещения, характер перемещения и др.). За счет компьютерного анализа указанных показателей в единовременном режиме регистрируемые показатели можно видеть на мониторе компьютера, т.е. посредством предложенного прибора врач может наблюдать за биомеханикой биологического объекта как в целом, так и его части в зависимости от поставленных перед исследователем задач. Кроме того, представленная конструкция прибора позволяет регистрировать пространственное изменение взаимоотношений частей биологического объекта (например: кисть-предплечие-плечо) при фиксации на них световых датчиков. Что позволяет получить важные диагностические данные о функциональном состоянии, его нарушении, а также определить локализацию нарушений для изучаемого объекта. Полученные данные, объективизирующие биомеханику биологического объекта, могут быть использованы для диагностики функциональных нарушений опорно-двигательного аппарата, постуральной системы, зубо-челюстнолицевой области и в других направлениях медицины. А также контролировать процесс лечения и реабилитации выявленных нарушений.
Устройство позволяет производить наблюдения в течение неограниченного промежутка времени и регистрировать произвольные движения изучаемого объекта и изменения биомеханики биологического объекта при проведении функциональных проб.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЛЕКСНОГО ИССЛЕДОВАНИЯ СОСТОЯНИЯ ВЕГЕТАТИВНОЙ НЕРВНОЙ СИСТЕМЫ | 2008 |
|
RU2407430C2 |
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2146494C1 |
| СПОСОБ АВТОНОМНОЙ ПРОГРАММИРУЕМОЙ ЭЛЕКТРОСТИМУЛЯЦИИ МЫШЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2437687C2 |
| ИНФРАКРАСНЫЙ АККОМОДОМЕТР | 1973 |
|
SU406529A1 |
| Способ измерения угловых перемещений объекта в двух взаимно перпендикулярных плоскостях и устройство для его осуществления | 1981 |
|
SU1049735A1 |
| НАБЛЮДАТЕЛЬНО-РЕГИСТРИРУЮЩЕЕ УСТРОЙСТВО С ЛОКАЛЬНО-АДАПТИВНОЙ ОПТИЧЕСКОЙ ЗАЩИТОЙ | 2015 |
|
RU2604110C2 |
| СТЕНД ДЛЯ ПРОИЗВОДСТВА РАДУЖНЫХ МУЛЬТИПЛЕКСНЫХ ГОЛОГРАММ | 2001 |
|
RU2216759C2 |
| ЦИФРОВОЙ ДВУХКООРДИНАТНЫЙ ДИНАМИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2008 |
|
RU2437058C2 |
| Устройство считывания сигнала светофора | 2021 |
|
RU2768694C1 |
| КОСМИЧЕСКИЙ ТЕЛЕСКОП ДЛЯ ОДНОВРЕМЕННОГО НАБЛЮДЕНИЯ ЗЕМЛИ И ЗВЁЗД | 2020 |
|
RU2746041C1 |
Изобретение относится к медицине. Устройство содержит светочувствительную линейную матрицу, корпус устройства со встроенной щелевой диафрагмой заданного размера, светофильтр, электронный блок обработки информации, точечный источник света, преобразователь сигнала со светочувствительной матрицы в цифровой код. Применение данного устройства позволит увеличить точность измерения координат биологического объекта и унифицировать конструкцию прибора и технологию его изготовления за счет создания нового алгоритма регистрации координат биологического объекта. 2 ил.
Устройство для регистрации угловых координат точечного объекта, содержащее светочувствительную линейную матрицу, корпус устройства со встроенной щелевой диафрагмой заданного размера, светофильтр, электронный блок обработки информации, точечный источник света, преобразователь сигнала со светочувствительной матрицы в цифровой код.
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2146494C1 |
| ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СМЕЩЕНИЯ | 2003 |
|
RU2319158C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ОБЪЕКТА | 1994 |
|
RU2089851C1 |
| СПЕКТРОМЕТРИЧЕСКОЕ ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО | 1994 |
|
RU2080815C1 |
| Устройство для измерения глубины промерзания грунта | 1945 |
|
SU66936A1 |
| WO 8911246 А1, 30.11.1989 | |||
| FERDINANDS R.E | |||
| An evaluation of biomechanical measures of bowling action legality in cricket | |||
| Sports Biomech | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| (Реферат в PubMed, PMID: 17933195) | |||
| ZHANG X. | |||

