ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к компактному и недорогому оптическому измерительному преобразователю смещения для определения смещения объекта, например линейного смещения, углового смещения, вибрации и т.д.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
За последнее время предпринимались попытки создания компактных и недорогих датчиков, служащих для определения перемещения объектов.
В статье "Schnell et al., Detection of movement with laser speckle patterns: statistical properties, Vol.15, No.1, January 1998, J. Opt. Soc. Am.", раскрыт датчик, предназначенный для определения перемещения рассеивающего объекта в плоскости. Объект освещают когерентным светом, в результате чего формируется спекл-структура за счет взаимодействия светового излучения с поверхностью объекта. Две чересстрочные дифференциальные гребенчатые матричные фотоприемные структуры действуют в качестве периодического фильтра по отношению к спектру интенсивности спекл-структуры в области пространственных частот. Приемник создает зависящий от смещения периодический выходной сигнал с нулевым смещением, позволяющий осуществлять измерение перемещения, происходящего со сколь угодно низкой скоростью. Направление перемещения может быть зарегистрировано посредством квадратурного сигнала, созданного второй парой чересстрочных гребенчатых матричных фотоприемных структур.
В международной заявке № WO 98/53271 раскрыт датчик, служащий для определения углового смещения одной или большего количества частей объекта. Определение также основано на изображениях спекл-структур, и его результат не зависит от расстояния до объекта, от любых продольных и поперечных перемещений, от формы объекта и от радиуса углового смещения.
В статье "T.Ushizaka, Y.Aizu, T.Asakura: Measurements of Velocity Using a Lenticular Grating, Appl. Phys. B 39, 97-106 (1986)" и в статье "Y.Aizu: "Principles and Development of spatial Filtering Velocimetry", Appl. Phys. B 43, 209-224 (1987)" раскрыто использование так называемой линзо-растровой дифракционной решетки для отклонения светового излучения, рассеянного частицей, на фотоприемники. Частицу, проходящую через измеряемый объем, освещают рассеянным светом от гелий-неонового (He-Ne) лазера (мощностью 5 милливатт (мВт)), освещающего матовое стекло, помещенное в объем, в котором осуществляют измерение. Основным отличительным признаком раскрытой системы измерения является формирование изображения перемещающейся частицы на линзо-растровой решетке. Следовательно, необходимо обеспечивать точный контроль расстояния между линзо-растровой решеткой и перемещающейся частицей. Кроме того, позади линзового растра расположен набор линз, служащих для соответствующей фокусировки светового излучения на приемники. Это не позволяет реализовать компактную оптическую систему, состоящую из одного элемента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, существует необходимость в создании более компактного и недорогого измерительного преобразователя смещения и преобразователя, не требующего точного контроля расстояния до объекта.
Согласно настоящему изобретению вышеупомянутых и иных целей достигают за счет системы оптического измерительного преобразователя смещения для детектирования смещения объекта, содержащей источник когерентного света для освещения, по меньшей мере, части объекта пространственно-когерентным светом, оптический узел, по меньшей мере, с тремя оптическими элементами для отображения различных специфических первых областей, расположенных в пространстве, по существу, на одну и ту же вторую область, расположенную в пространстве, за счет чего осуществляют формирование осциллирующего оптического сигнала, вызванного изменениями фазы светового излучения, исходящего из объекта, перемещающегося в вышеупомянутых первых областях.
Основным отличительным признаком настоящего изобретения является использование периодической оптической структуры, то есть оптического узла, для формирования периодического оптического сигнала, испускаемого освещенным перемещающимся объектом, посредством:
1) освещения периодической оптической структуры (узла) источником света для формирования интерференционной картины (аналогично лазерной доплеровской анемометрии) и/или
2) освещения объекта источником света и направления светового излучения от освещенного объекта на светочувствительные элементы посредством периодической оптической структуры.
Источник света освещает объект, посредством чего на объекте образуется спекл-структура. При перемещении объекта происходит перемещение спекл-структуры и осуществляют измерение перемещения спекл-структуры, при этом отсутствует необходимость формирования изображения объекта на периодической оптической структуре, то есть на оптическом узле.
Поскольку не формируют изображение спекл-структуры на оптическом узле, то расстояние и возможные изменения расстояния между объектом и оптическим узлом, по существу, не оказывают воздействия на рабочие характеристики системы.
В одном из вариантов осуществления изобретения, выполненном с возможностью применения в области лазерной доплеровской анемометрии, предусмотрено наличие источника коллимированного света, служащего для освещения оптического узла, и предусмотрено наличие системы формирования изображений, служащей для формирования изображения оптического узла в объеме, в котором осуществляют измерение, за счет чего обеспечивают формирование интерференционной картины в объеме, в котором производят измерение.
В другом варианте осуществления настоящего изобретения прием светового излучения, исходящего от объекта, осуществляют во входной плоскости. Оптический узел направляет световое излучение, исходящее от различных частей входной плоскости, по существу, в одном и том же направлении посредством соответствующих компонентов оптического узла.
В еще одном варианте осуществления настоящего изобретения вышеупомянутые варианты осуществления изобретения объединены, то есть оптический узел используют как для пропускания когерентного света к объекту, так и для приема светового излучения, исходящего от объекта.
Деление светового пучка от источника света на множество световых пучков за счет освещения оптического узла повышает безопасность, поскольку снижена мощность отдельного светового пучка, который может случайно попасть в глаз человека.
Кроме того, отношение сигнал/шум является более высоким, поскольку проецирование на объект изображения, подобного картине интерференционных полос, обеспечивает оптимальное соответствие спектра спекл-структуры оптическому узлу.
Отдельные оптические элементы могут взаимодействовать со световым излучением за счет отражения, преломления, рассеяния, дифракции и т.д., либо по отдельности, либо в любой совокупности, падающего на них светового излучения. Следовательно, отдельные оптические элементы могут представлять собой линзы, например цилиндрические линзы, сферические линзы, линзы Френеля, шаровые линзы и т.д., призмы, укороченные призмы, зеркала, жидкие кристаллы и т.д.
В альтернативном варианте оптический узел может быть сформирован посредством дифракционного оптического элемента, например голографических линз и т.п.
Кроме того, оптический узел может содержать линейную фазовую дифракционную решетку с синусоидальной модуляцией толщины пленки, например в пленке фоторезиста.
После взаимодействия с отдельными оптическими элементами световое излучение может быть пропущено через вышеупомянутые элементы или может быть отражено от вышеупомянутых элементов, например, снабженных соответствующим отражающим покрытием. Система также содержит приемник, содержащий, по меньшей мере, один чувствительный элемент фотоприемника, для преобразования падающего на него света в соответствующий электронный сигнал. Приемник расположен на пути прохождения светового излучения, исходящего из оптического элемента.
Настоящее изобретение наиболее легко понять при рассмотрении варианта осуществления, в котором оптический узел представляет собой оптический узел с периодической структурой, представляющий собой линейный растр, состоящий из цилиндрических линз. Фокусное расстояние линз может быть положительным или отрицательным. Для простоты на приложенных фигурах показаны только положительные линзы. Входная плоскость расположена перед линзовым растром на расстоянии, равном фокусному расстоянию линз, и является перпендикулярной к направлению распространения входного светового излучения, исходящего от объекта.
Поверхность объекта имеет такой размер, который обеспечивает возможность формирования спекл-структуры. Шероховатость поверхности объекта вызывает формирование спекл-структуры, поскольку отклонения профиля поверхности по-разному изменяют фазу различных частей падающего света. В предпочтительном варианте, по меньшей мере, часть поверхности освещают лазером, а регистрация спекл-структуры может быть осуществлена во входной плоскости, например путем измерений интенсивности, изменения которой вызваны изменениями электромагнитного поля в различных областях входной плоскости. Такие изменения интенсивности электромагнитного поля далее обозначены на "изменения спеклов". При перемещении объекта происходит перемещение изменений спеклов во входной плоскости со скоростью, пропорциональной скорости перемещения поверхности или угловой скорости. Отдельные оптические элементы направляют световое излучение на фотоприемник, выполненный согласно варианту осуществления настоящего изобретения. При перемещении изменения спеклов во входной плоскости на расстояние, равное ширине отдельного оптического элемента, происходит развертка соответствующего светового излучения, исходящего от отдельного оптического элемента, по всей площади фотоприемника. Это повторяется для следующего оптического элемента, и понятно, что когда изменение спеклов проходит расстояние, равное длине линейного растра, то происходит периодическая развертка по фотоприемнику такое количество раз, которое равно количеству отдельных оптических элементов линейного растра. Понятно, что для обычной картины изменения спеклов во входной плоскости, при которой размер спекла, по существу, равен размеру отдельного оптического элемента, интенсивность электромагнитного поля на чувствительном элементе изменяется между высокой интенсивностью в тот момент, когда яркие области изменений спеклов совмещены с оптическими элементами, и низкой интенсивностью в тот момент, когда темные области изменений спеклов совмещены с оптическими элементами, и что частота колебаний соответствует скорости смещения изменений спеклов в продольном направлении линейного растра, деленной на шаг растра, то есть на расстояние между отдельными соседними оптическими элементами.
Этот принцип действия, в общем случае, применим и для других вариантов осуществления настоящего изобретения, вне зависимости от типа используемого оптического узла и вне зависимости от того, формируют ли изображение объекта во входной плоскости или нет. Например, освещение объекта может быть осуществлено точечным источником, расположенным, по существу, во входной плоскости и испускающим расходящийся пучок света. Происходит диффузное отражение излучения от объекта и его регистрация во входной плоскости. В данной области техники хорошо известно, что смещения изменений спеклов во входной плоскости являются вдвое большими, чем соответствующие смещения на поверхности объекта, вне зависимости от расстояния между объектом и входной плоскостью.
В альтернативном варианте объект может быть освещен коллимированным пучком света, и в этом случае смещение изменений спеклов во входной плоскости равно соответствующим смещениям на поверхности объекта, вне зависимости от расстояния между объектом и входной плоскостью.
В еще одном варианте осуществления настоящего изобретения между объектом и входной плоскостью имеется Фурье-преобразующая линза, расположенная таким образом, что входная плоскость находится в Фурье-плоскости Фурье-преобразующей линзы, то есть в задней фокальной плоскости линзы, за счет чего угол поворота объекта может быть определен вне зависимости от расстояния между объектом и входной плоскостью. Кроме того, зарегистрированная частота является независимой от радиуса кривизны вращающегося объекта и независимой от длины волны. Кроме того, поперечное смещение объекта приводит только лишь к декорреляции спеклов и не вызывает смещения спеклов.
Оптический узел обеспечивает пространственную фильтрацию электромагнитного поля во входной плоскости таким образом, что перемещение изменений спеклов, размер которых сравним с размером отдельных оптических элементов, приводит к осцилляциям сигнала, поступающего из приемника. Скорость перемещения может быть измерена, например, путем регистрации переходов этого сигнала через нулевой уровень.
Понятно, что в варианте осуществления настоящего изобретения с наличием двумерного растра, состоящего из оптических элементов, может быть определено двумерное смещение спеклов.
В предпочтительном варианте осуществления настоящего изобретения система дополнительно содержит систему формирования изображений для формирования изображения части входной плоскости, по меньшей мере, на одном чувствительном элементе, за счет чего каждый из отдельных оптических элементов в совокупности с вышеупомянутой системой формирования изображений формирует изображения конкретных частей входной плоскости в одной и той же конкретной области выходной плоскости, поэтому изображение тех точек во входной плоскости, которые имеют одинаковое взаимное расположение относительно соответствующих соседних оптических элементов, формируют в одной и той же точке на фотоприемнике. Ниже приведено более подробное объяснение того, что без наличия системы формирования изображений существует небольшое расстояние между сформированными на приемнике изображениями точек для соответствующих точек во входной плоскости, имеющих одинаковое взаимное расположение относительно соответствующих оптических элементов. Однако точность системы, тем не менее, может являться достаточной и зависит от фактического размера системы.
Для получения еще более компактной системы, пригодной для серийного производства, оптический узел и вышеупомянутая система формирования изображений могут быть объединены в единый физический узел, выполненный, например, в виде литого пластмассового узла.
Измерительный преобразователь смещения с оптическим узлом облегчает измерение перемещения изменения спеклов во входной плоскости в направлении оптического узла. Оптическая система, расположенная между объектом и входной плоскостью, определяет тип перемещения объекта, определенного путем преобразования изменений спеклов, возникающих в результате указанного перемещения объекта, в линейное поступательное перемещение спеклов во входной плоскости системы. Перемещением объекта может являться его вращение и/или смещение в плоскости или вне плоскости, например одномерное или двумерное смещение, одномерная или двумерная скорость, угловое смещение, угловая скорость и т.д.
Количество, размер и местоположение чувствительных элементов, наряду с обработкой сигналов, полученных из вышеупомянутых элементов, например, путем вычитания, сложения и т.д., определяют степень подавления гармоник в выходном сигнале. В частности, в случае получения квадратурного (или близкого к квадратурному) сигнала может быть исследовано направление перемещения изменений спеклов.
Важное преимущество настоящего изобретения состоит в том, что измерительный преобразователь смещения содержит фотоприемник, состоящий всего лишь из нескольких элементов, например из одного, двух, четырех, шести или семи и т.д. элементов.
Вероятность пропадания сигнала, характеризующего скорость, может быть уменьшена за счет наличия второго набора чувствительных элементов фотоприемника, смещенных относительно существующего набора чувствительных элементов таким образом, чтобы при отсутствии сигнала из одного набора чувствительных элементов из другого набора чувствительных элементов мог быть получен сигнал, являющийся статистически независимым от первого сигнала. Таким образом, за счет надлежащей обработки этих двух сигналов, например, путем переключения на набор чувствительных элементов, осуществляющих формирование сигнала, характеризующего скорость, сводят к минимуму вероятность пропадания сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения ниже приведена ссылка на сопроводительные чертежи, служащие в качестве примеров, на которых изображено следующее:
на Фиг.1 схематично изображен предпочтительный вариант осуществления измерительного преобразователя смещения согласно настоящему изобретению,
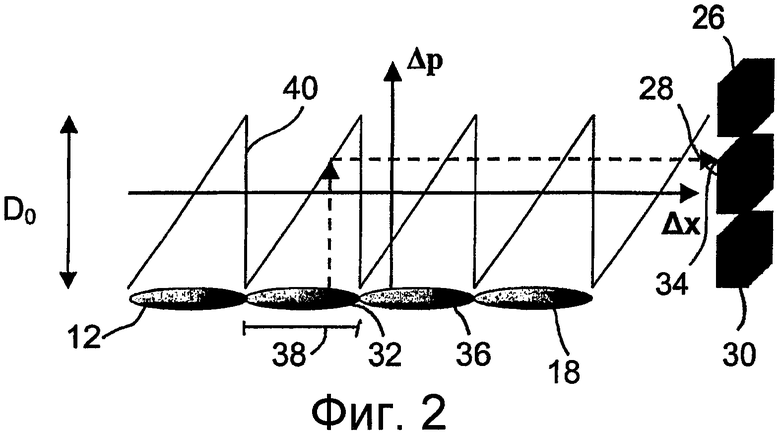
на Фиг.2 показан принцип действия измерительного преобразователя смещения из Фиг.1,
на Фиг.3 схематично изображен другой предпочтительный вариант осуществления измерительного преобразователя смещения согласно настоящему изобретению,
на Фиг.4 показан принцип действия измерительного преобразователя смещения из Фиг.3,
на Фиг.5 схематично показано распространение электромагнитной волны в измерительном преобразователе смещения из Фиг.1,
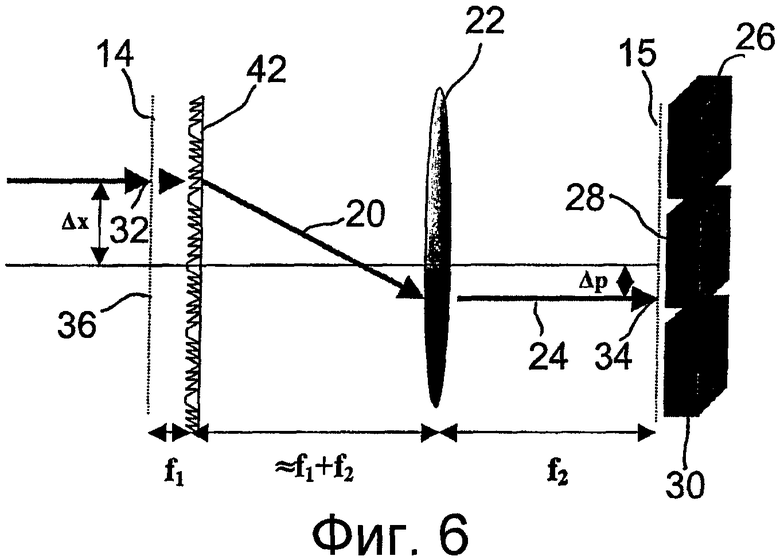
на Фиг.6 схематично изображен измерительный преобразователь смещения с линзовой структурой, состоящей из линз Френеля,
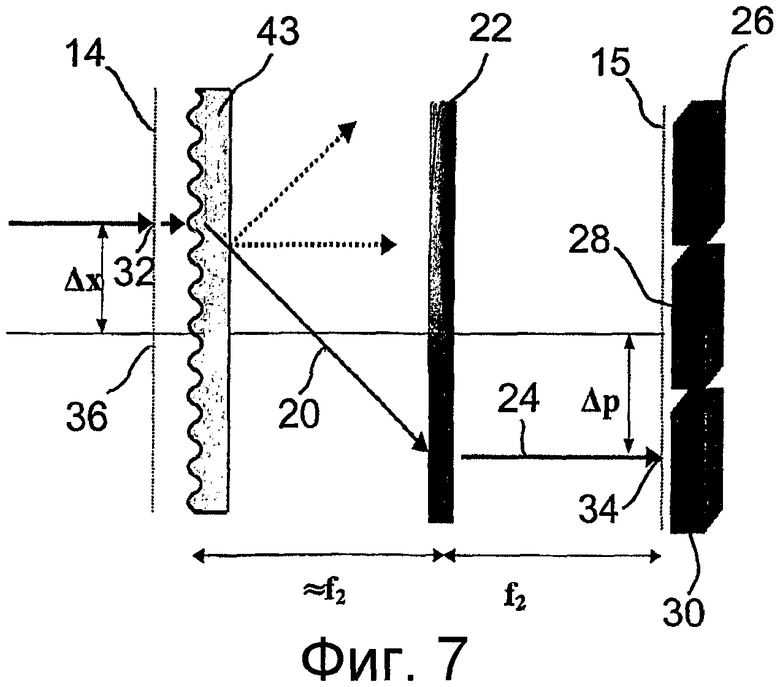
на Фиг.7 схематично изображен измерительный преобразователь смещения с линейной фазовой дифракционной решеткой, имеющей синусоидальную модуляцию по толщине пленки,
на Фиг.8 схематично изображен измерительный преобразователь смещения с призменной структурой,
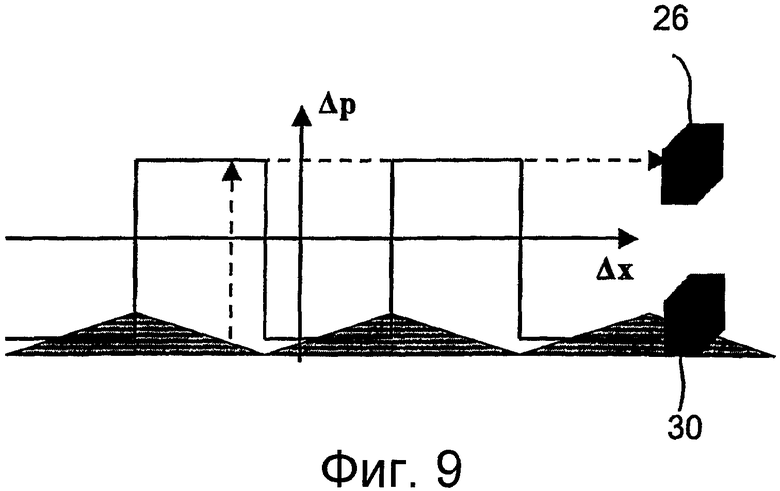
на Фиг.9 показан принцип действия измерительного преобразователя смещения из Фиг.8,
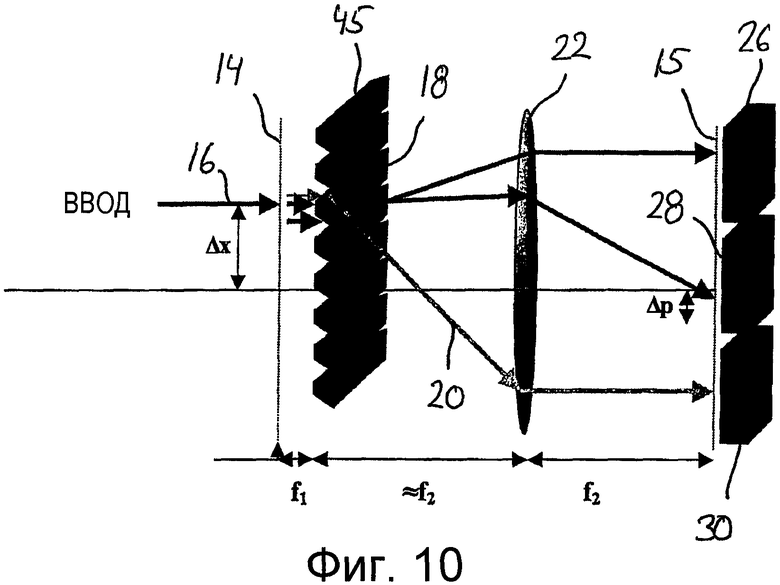
на Фиг.10 схематично изображен измерительный преобразователь смещения с структурой, состоящей из укороченных призм,
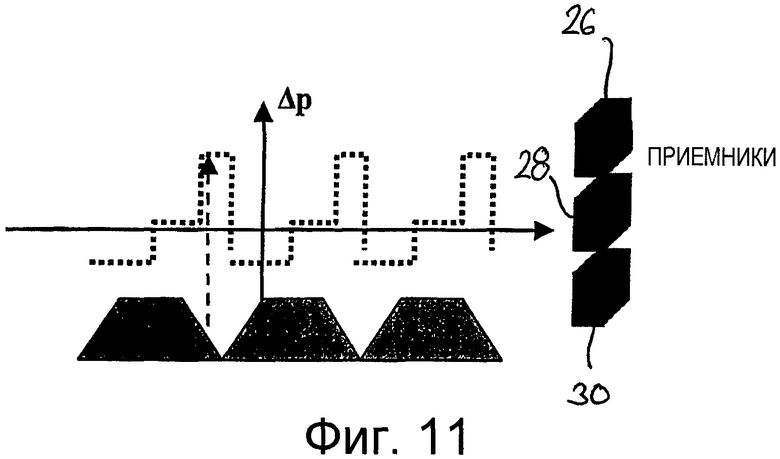
на Фиг.11 показан принцип действия измерительного преобразователя смещения из Фиг.10,
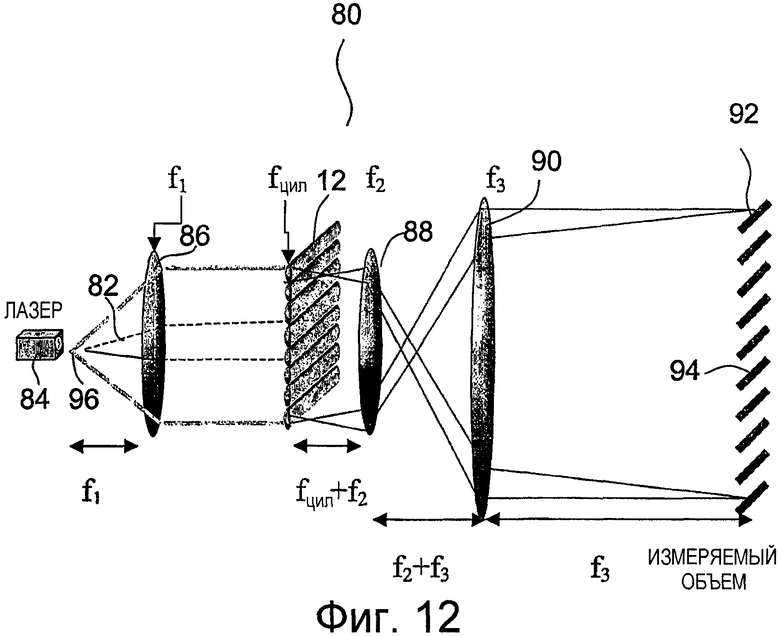
на Фиг.12 изображен вариант осуществления изобретения, функционирующий подобно лазерному доплеровскому анемометру,
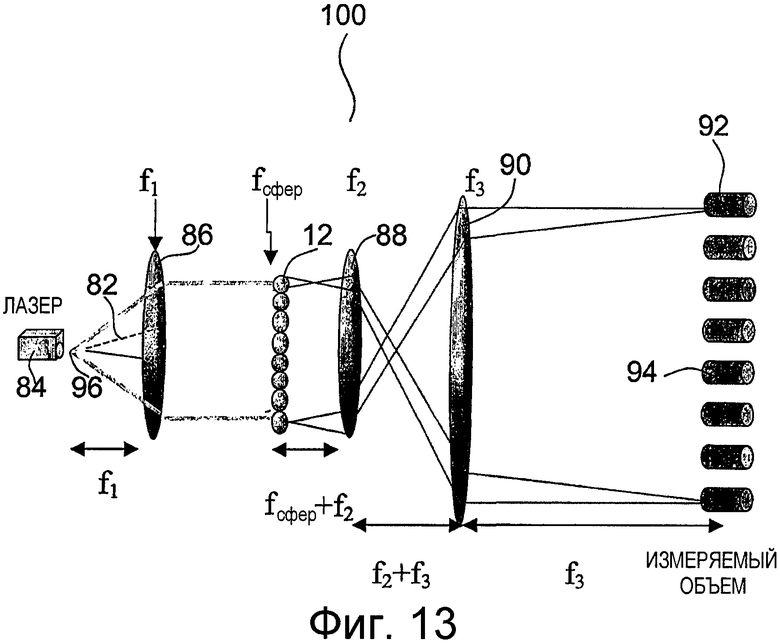
на Фиг.13 изображен другой вариант осуществления изобретения, функционирующий подобно лазерному доплеровскому анемометру,
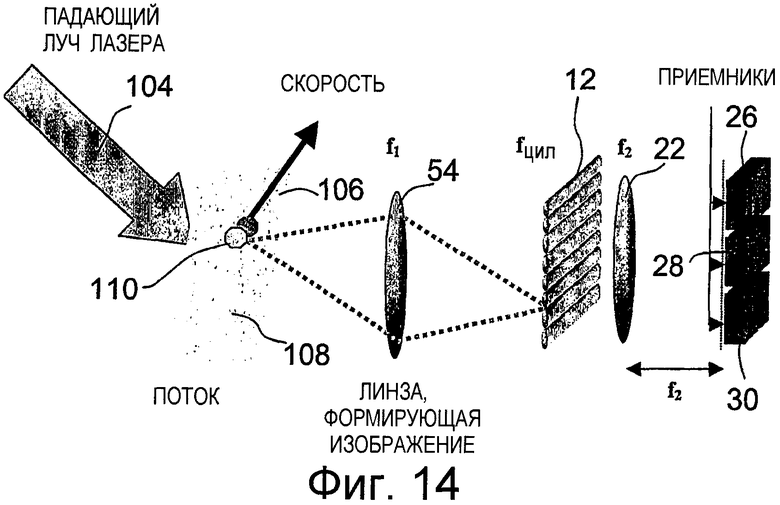
на Фиг.14 изображен вариант осуществления изобретения, выполненный с возможностью определения скорости частицы, в котором может быть определено направление скорости частицы,
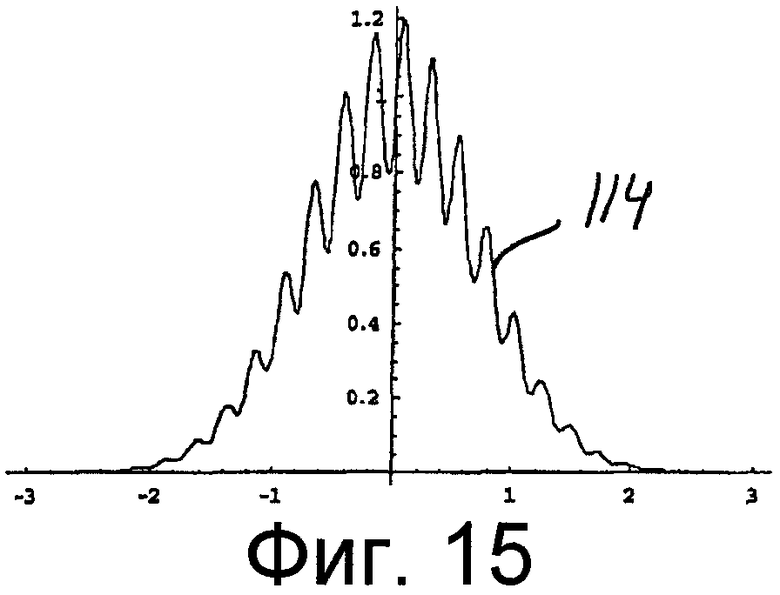
на Фиг.15 изображен график сигнала чувствительного элемента из варианта осуществления изобретения, показанного на Фиг.12 или на Фиг.13,
на Фиг.16 изображен график сигнала смещенного чувствительного элемента фотоприемника, имеющего запаздывание по фазе относительно сигнала, показанного на Фиг.14,
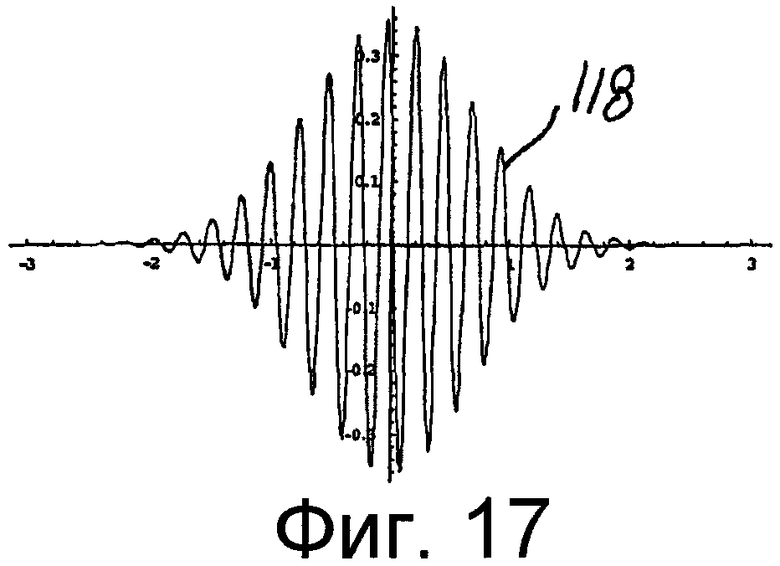
на Фиг.17 изображен график разности между сигналами, показанными на Фиг.14 и Фиг.15,
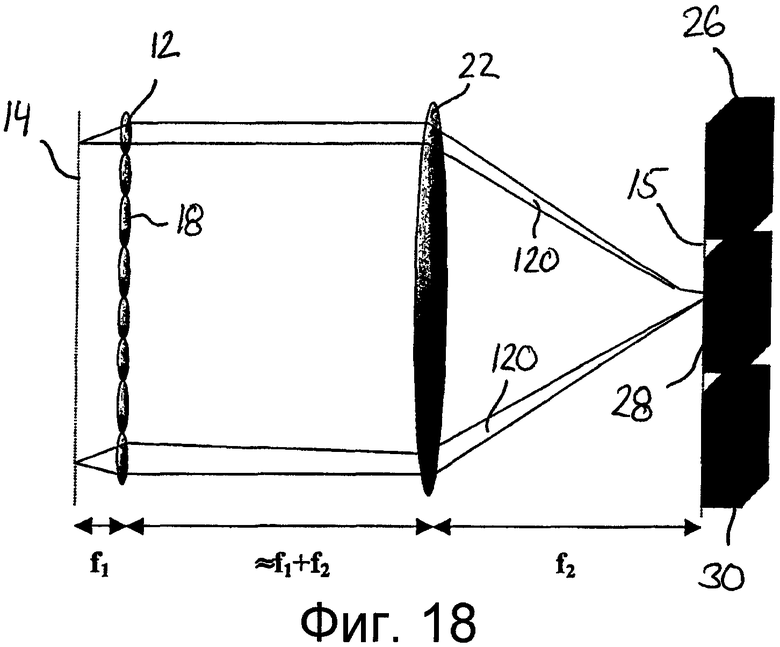
на Фиг.18 показано то, каким образом задают входную плоскость в одном из вариантов осуществления настоящего изобретения,
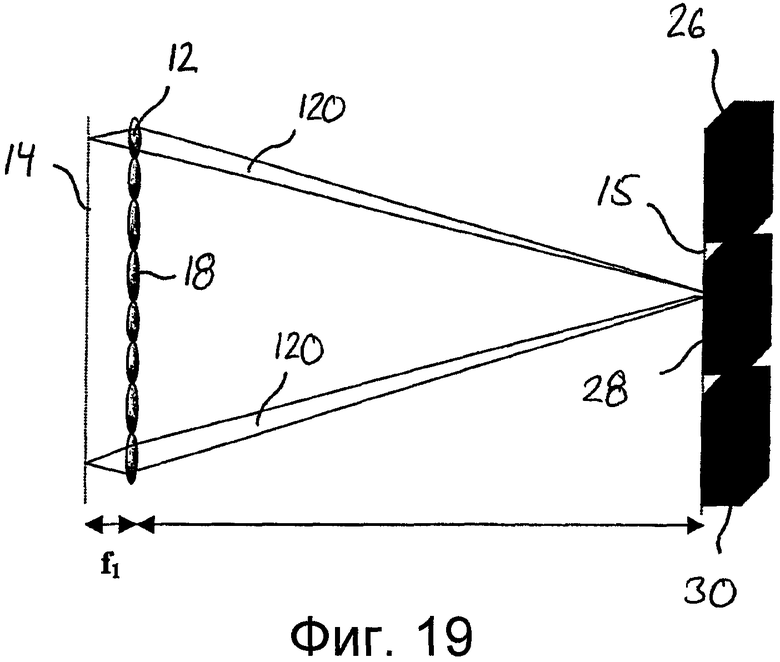
на Фиг.19 показано то, каким образом задают входную плоскость в другом варианте осуществления настоящего изобретения,
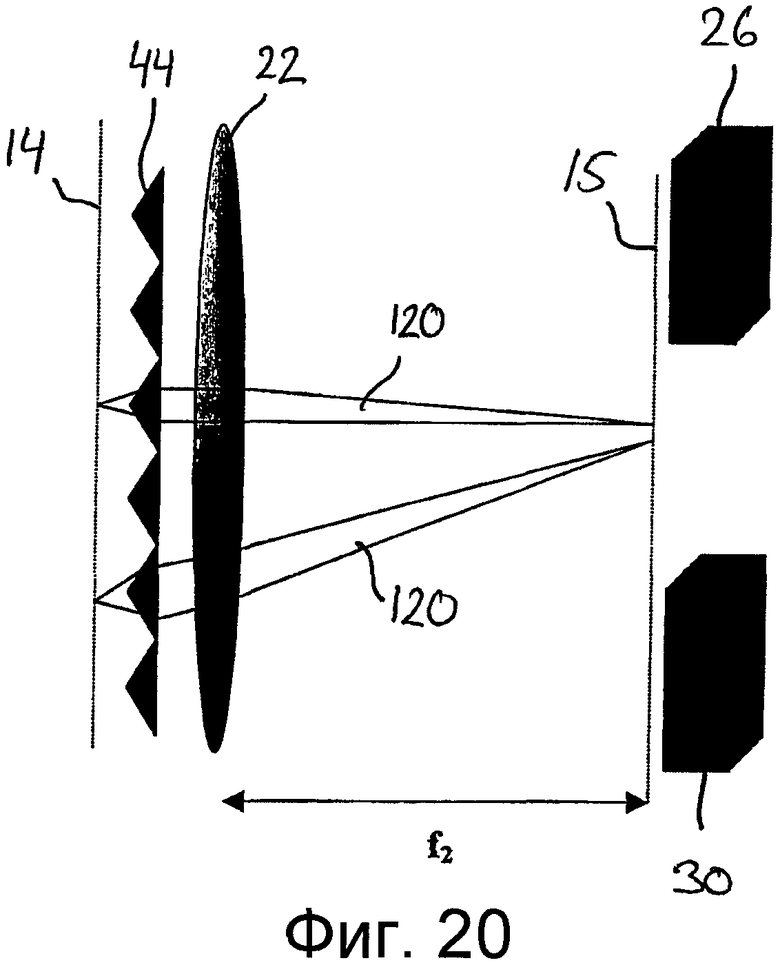
на Фиг.20 показано то, каким образом задают входную плоскость в еще одном варианте осуществления настоящего изобретения,
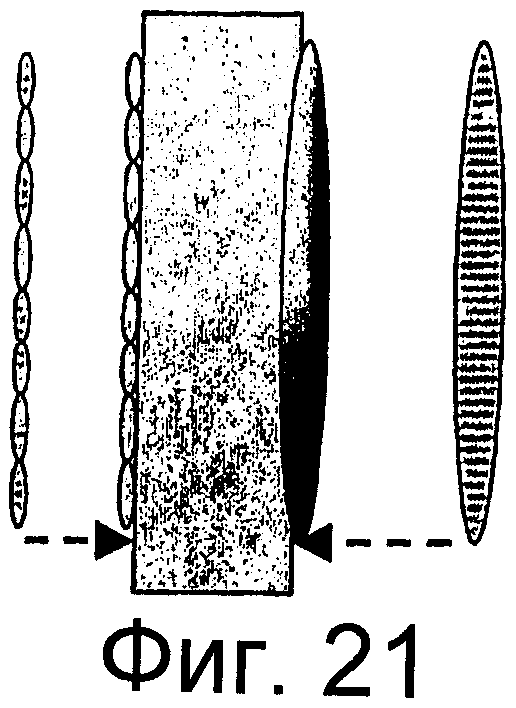
на Фиг.21 показан вариант объединения оптических компонентов измерительного преобразователя смещения согласно настоящему изобретению,
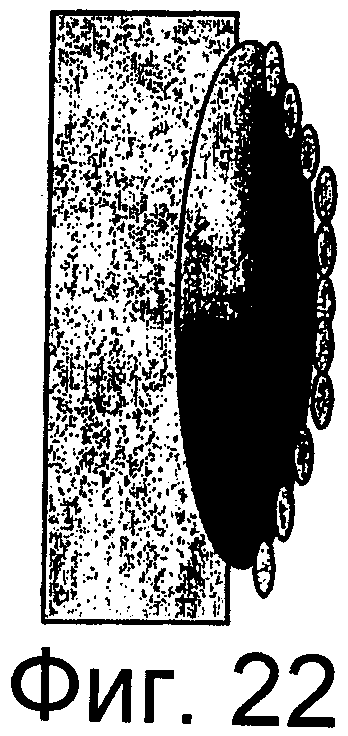
на Фиг.22 показан другой вариант объединения оптических компонентов измерительного преобразователя смещения согласно настоящему изобретению,
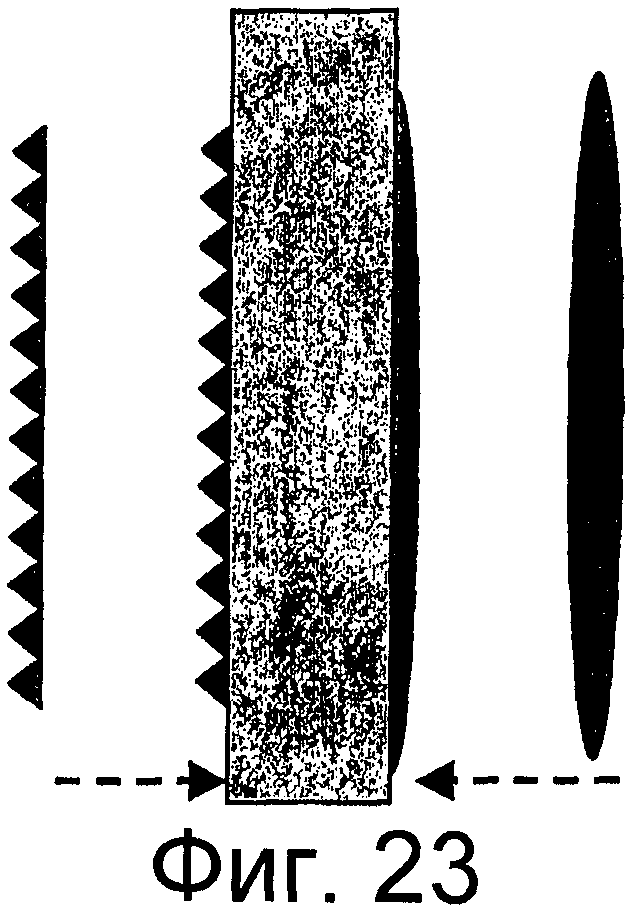
на Фиг.23 показан вариант объединения оптических компонентов измерительного преобразователя смещения с призменной структурой согласно настоящему изобретению,
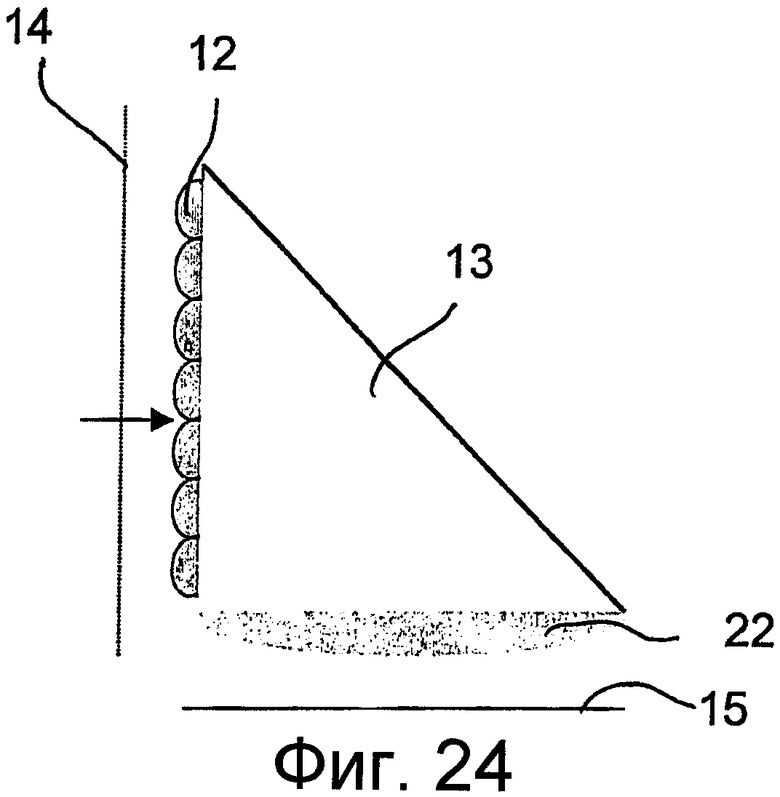
на Фиг.24 схематично изображен измерительный преобразователь смещения согласно настоящему изобретению, в котором оптические компоненты объединены с призмой,
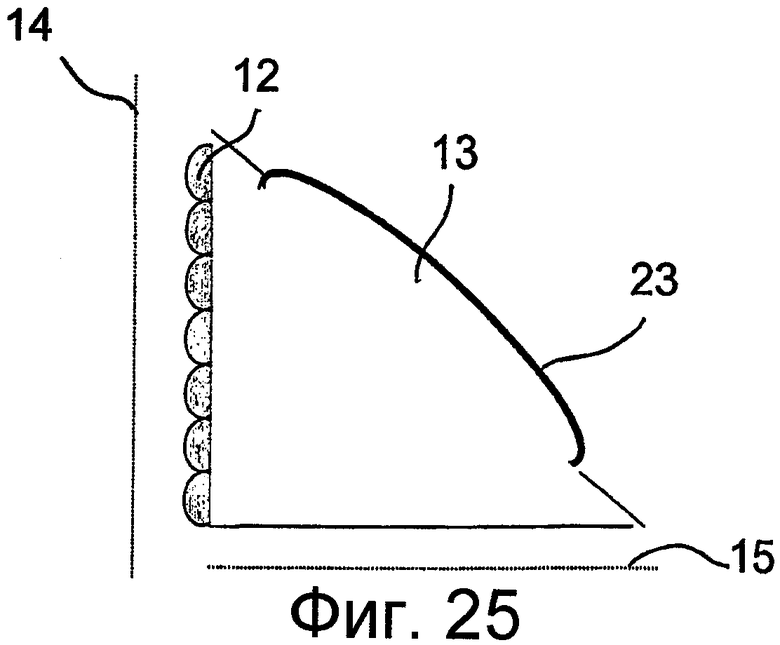
на Фиг.25 схематично изображен другой вариант измерительного преобразователя смещения согласно настоящему изобретению, в котором оптические компоненты объединены с призмой,
на Фиг.26 схематично изображена двумерная структура, состоящая из укороченных призм,
на Фиг.27 показано распространение электромагнитных волн, преломленных укороченной призмой, по направлению к плоскости приемника,
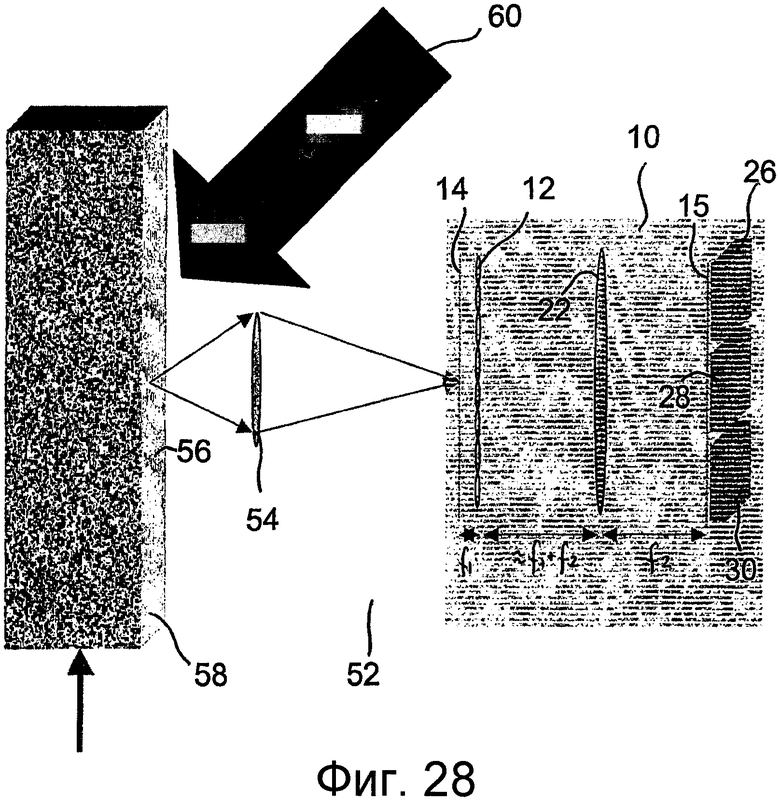
на Фиг.28 схематично показано функционирование системы измерительного преобразователя линейного смещения согласно настоящему изобретению,
на Фиг.29 схематично показано функционирование другого варианта системы измерительного преобразователя линейного смещения согласно настоящему изобретению,
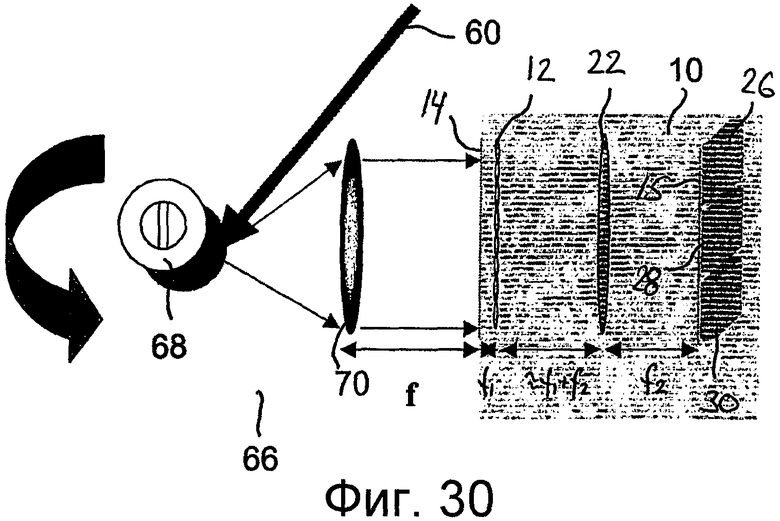
на Фиг.30 схематично показано функционирование системы измерительного преобразователя смещения согласно настоящему изобретению, служащей для определения угла поворота,
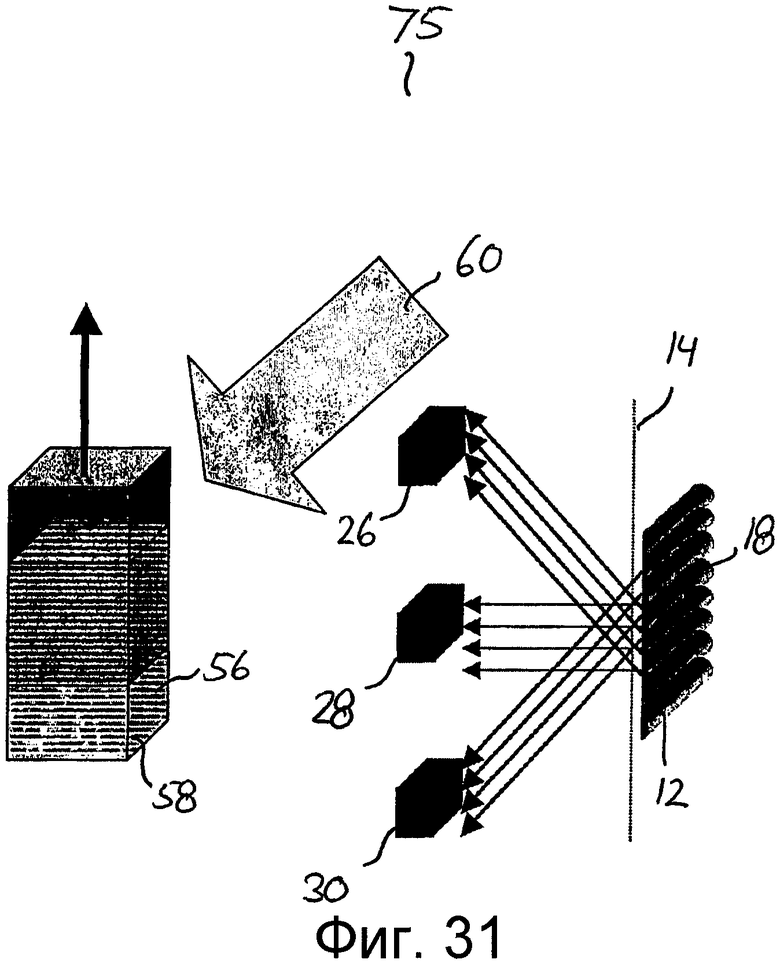
на Фиг.31 схематично показана конфигурация отражательных элементов согласно настоящему изобретению для определения линейного смещения,
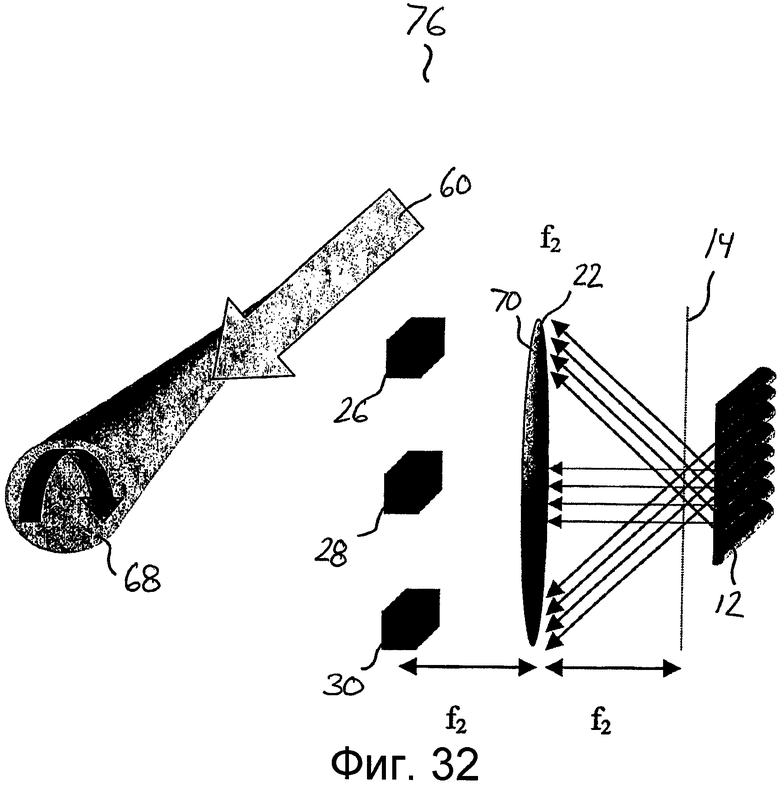
на Фиг.32 схематично показана конфигурация отражательных элементов согласно настоящему изобретению для определения угла поворота,
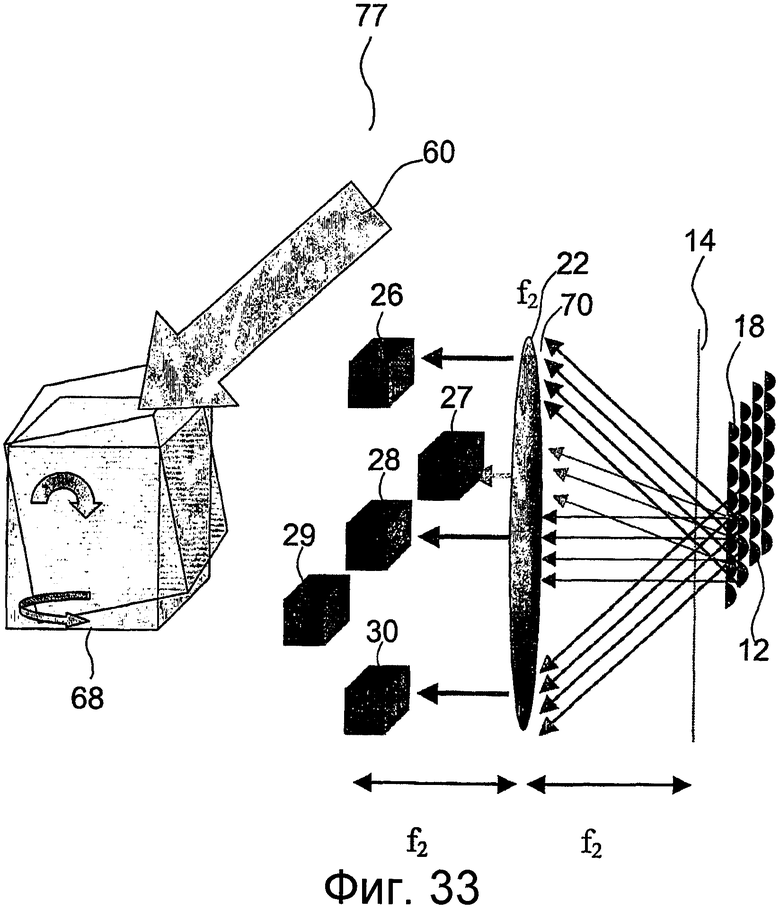
на Фиг.33 схематично показана конфигурация отражательных элементов согласно настоящему изобретению для определения двумерного угла поворота,
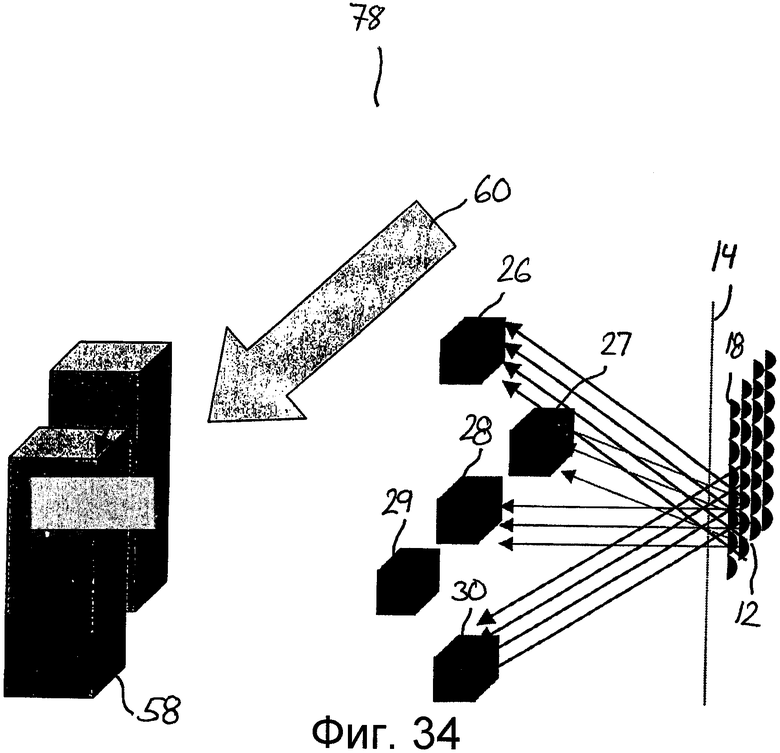
на Фиг.34 схематично показана конфигурация отражательных элементов согласно настоящему изобретению для определения двумерного линейного смещения,
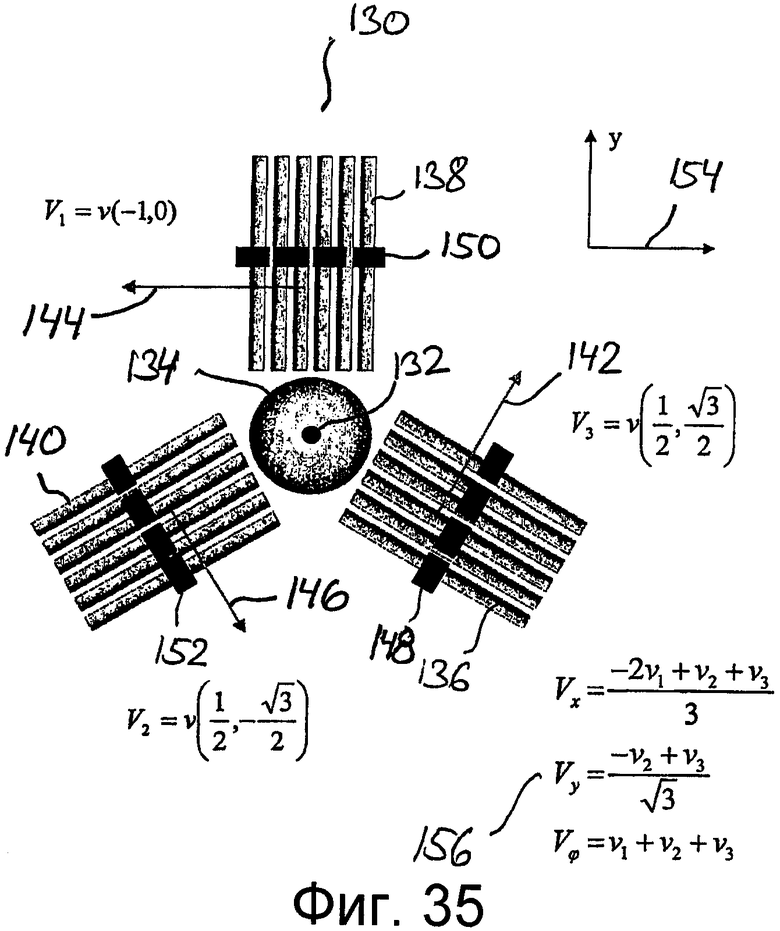
на Фиг.35 схематично показан вариант осуществления изобретения с тремя линзо-растровыми структурами,
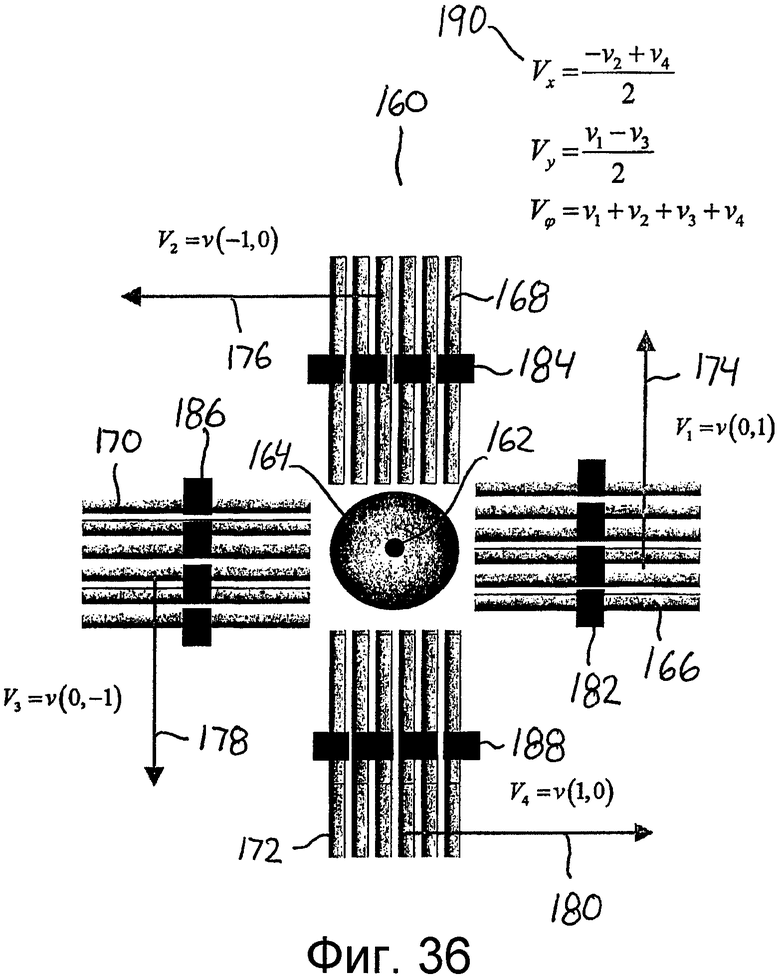
на Фиг.36 схематично показан вариант осуществления изобретения с четырьмя линзо-растровыми структурами,
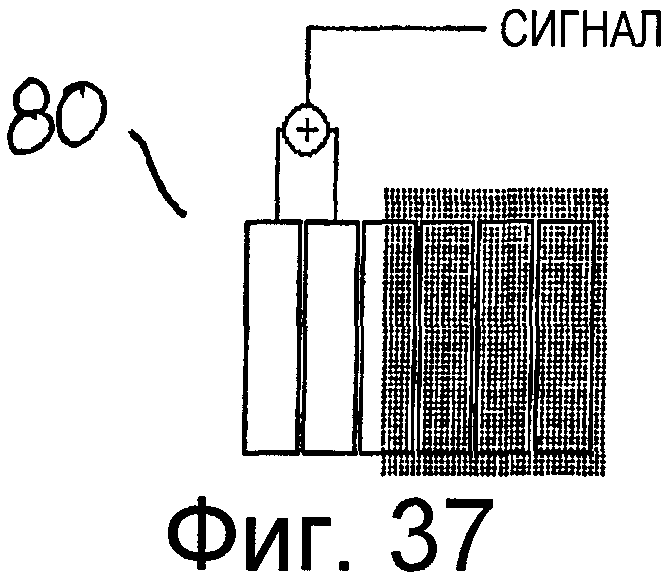
на Фиг.37 схематично показана простая конфигурация приемника,
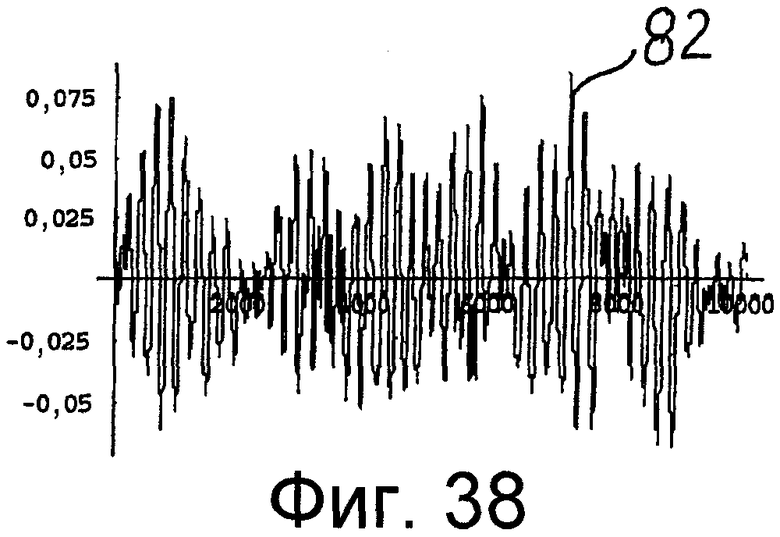
на Фиг.38 изображен график сигнала, получаемого посредством приемника, показанного на Фиг.37,
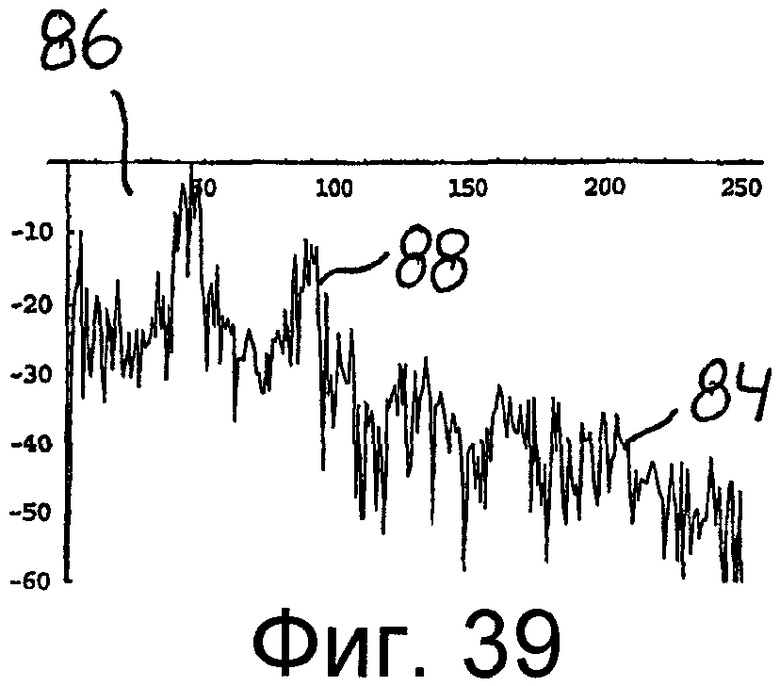
на Фиг.39 изображен график спектра мощности сигнала, показанного на Фиг.38,
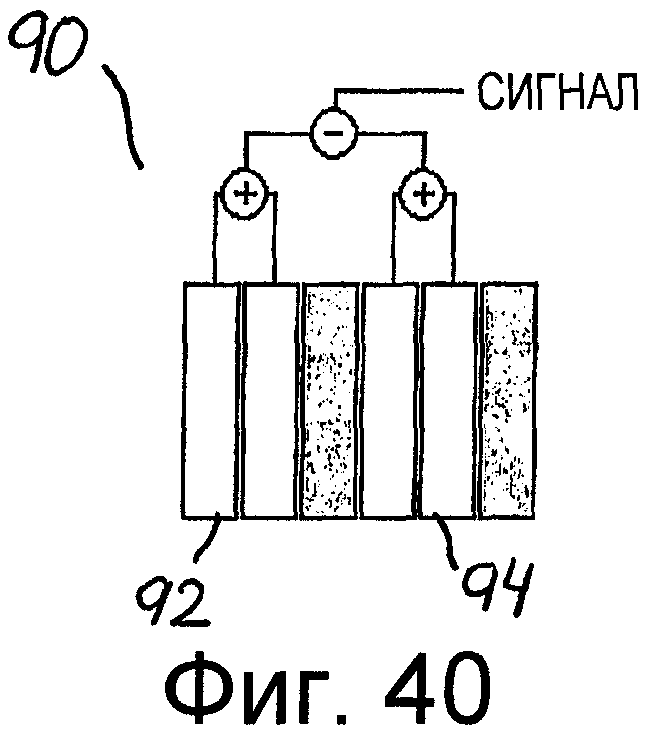
на Фиг.40 схематично показан другой вариант конфигурации приемника,
на Фиг.41 изображен график сигнала, получаемого посредством приемника, показанного на Фиг.40,
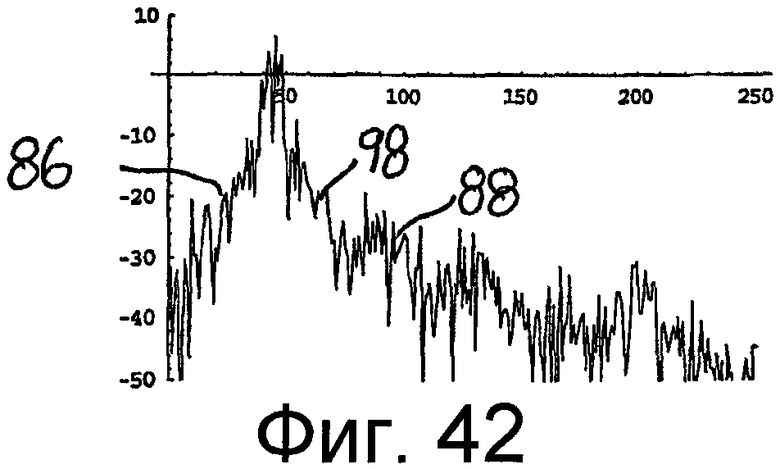
на Фиг.42 изображен график спектра мощности сигнала, показанного на Фиг.41,
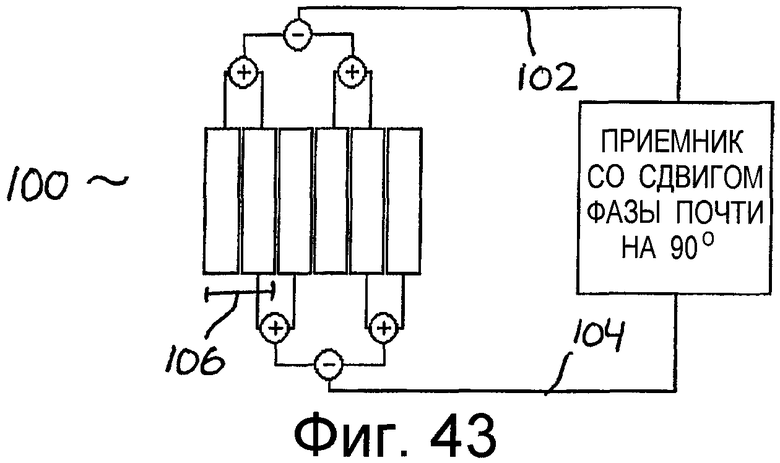
на Фиг.43 схематично показан еще один вариант конфигурации приемника,
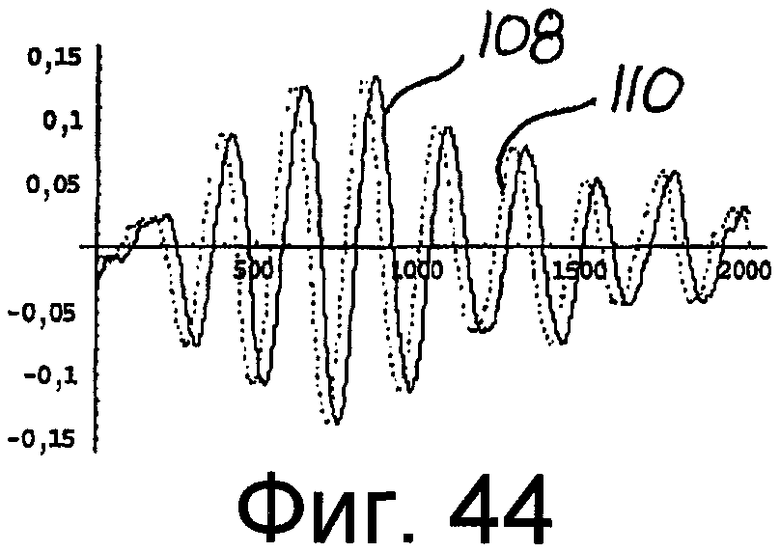
на Фиг.44 изображен график сигнала, получаемого посредством приемника, имеющего конфигурацию, показанную на Фиг.43,
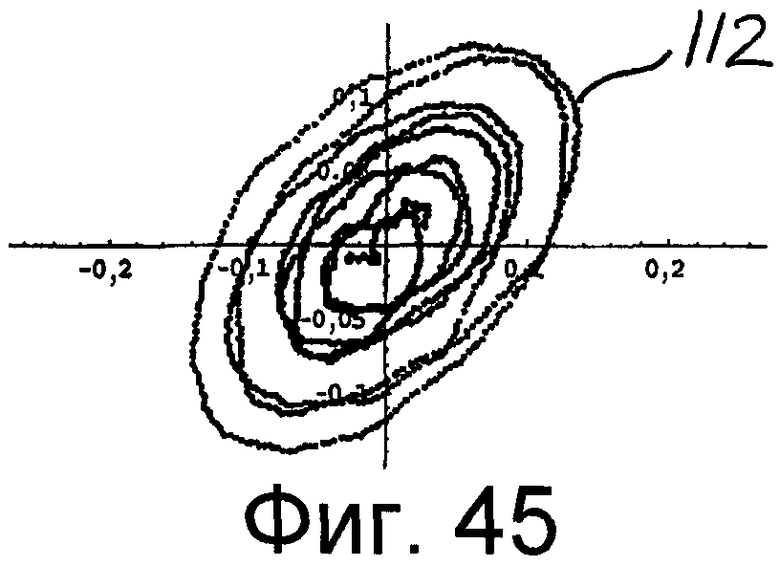
на Фиг.45 изображена фазовая диаграмма сигнала, показанного на Фиг.44,
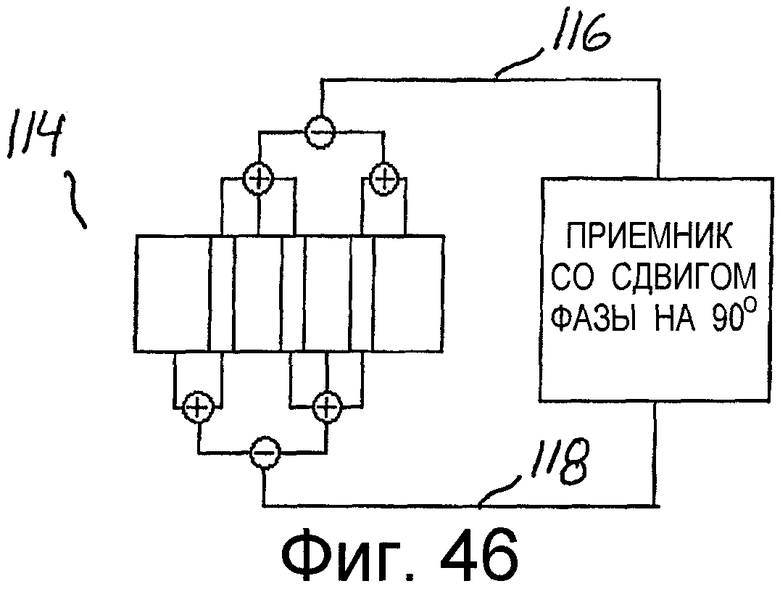
на Фиг.46 схематично показан еще один вариант конфигурации приемника,
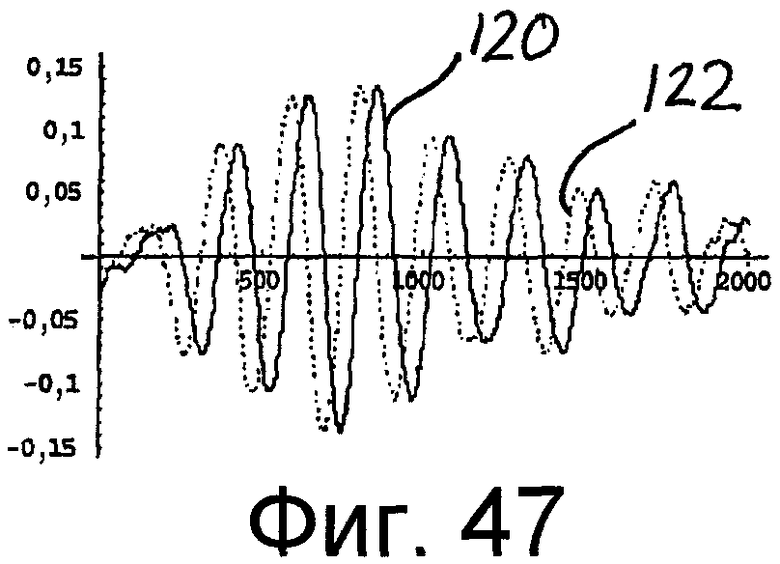
на Фиг.47 изображен график сигнала, получаемого посредством приемника, показанного на Фиг.46,
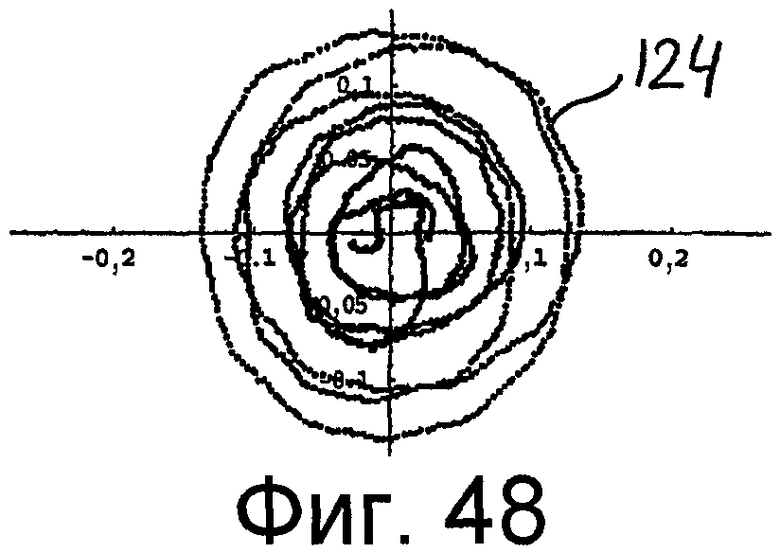
на Фиг.48 изображена фазовая диаграмма сигнала, показанного на Фиг.47,
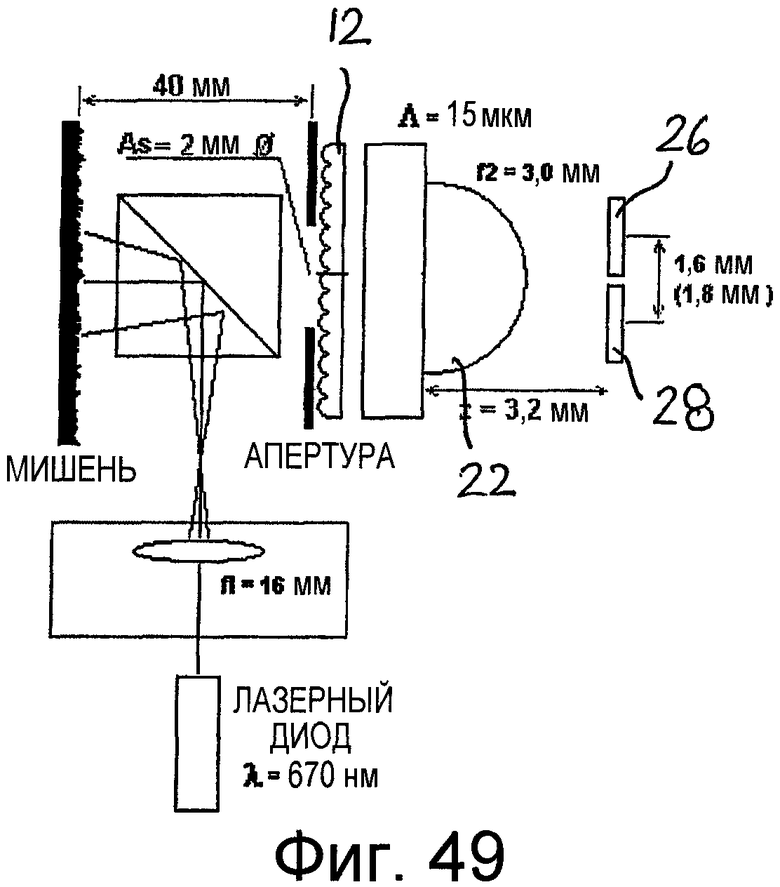
на Фиг.49 схематично показан вариант осуществления настоящего изобретения в миниатюре,
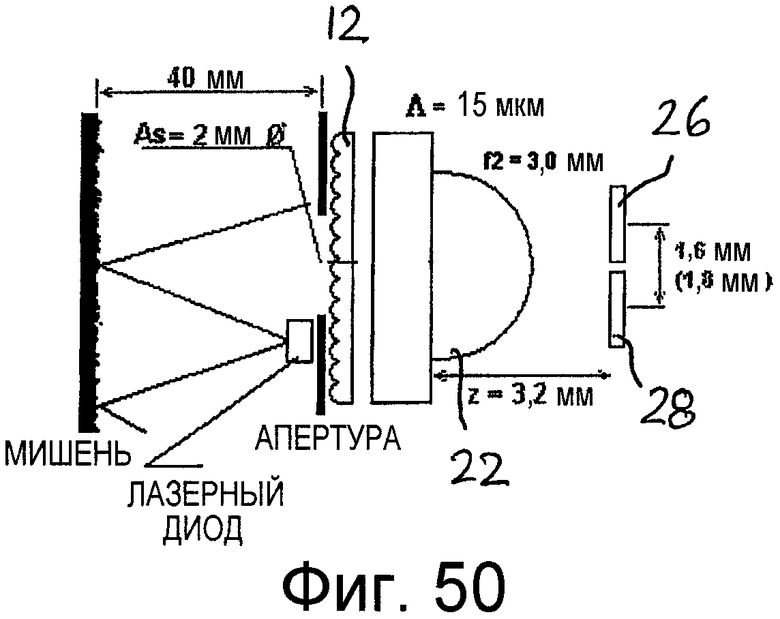
на Фиг.50 схематично показан другой вариант осуществления настоящего изобретения в миниатюре,
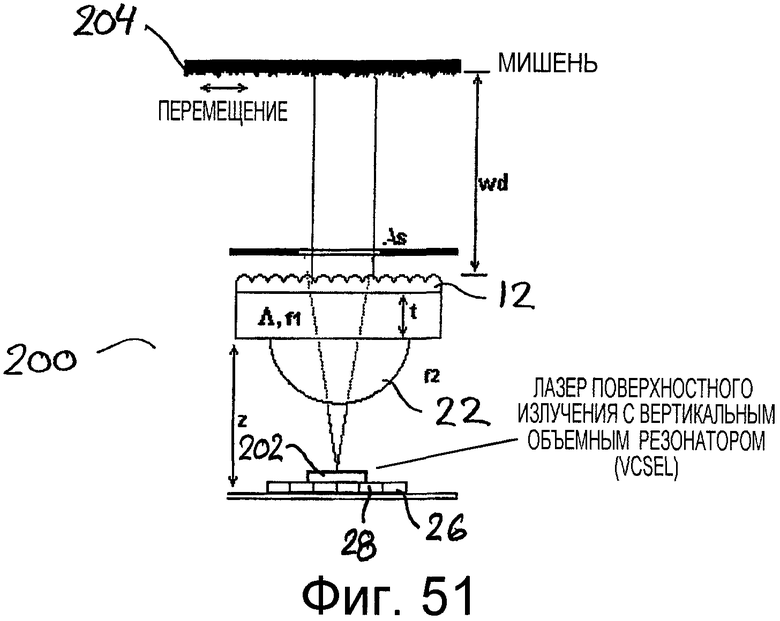
на Фиг.51 схематично показан вариант осуществления изобретения с общей передающей и приемной оптической системой,
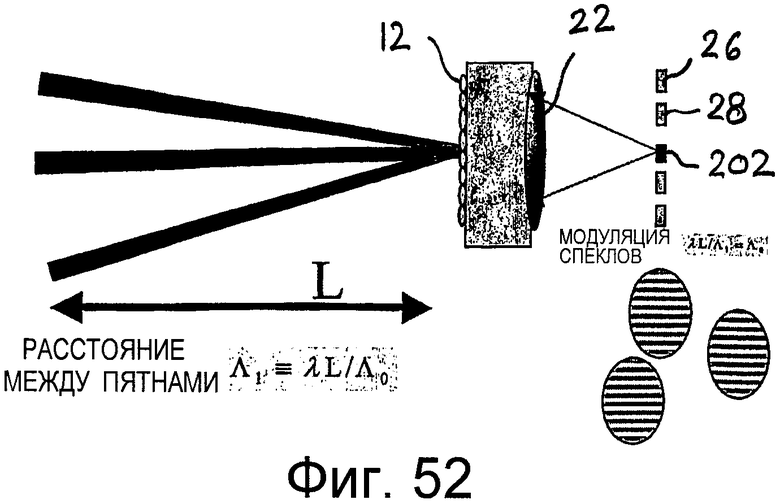
на Фиг.52 схематично показан принцип действия варианта осуществления изобретения, изображенного на Фиг.51,
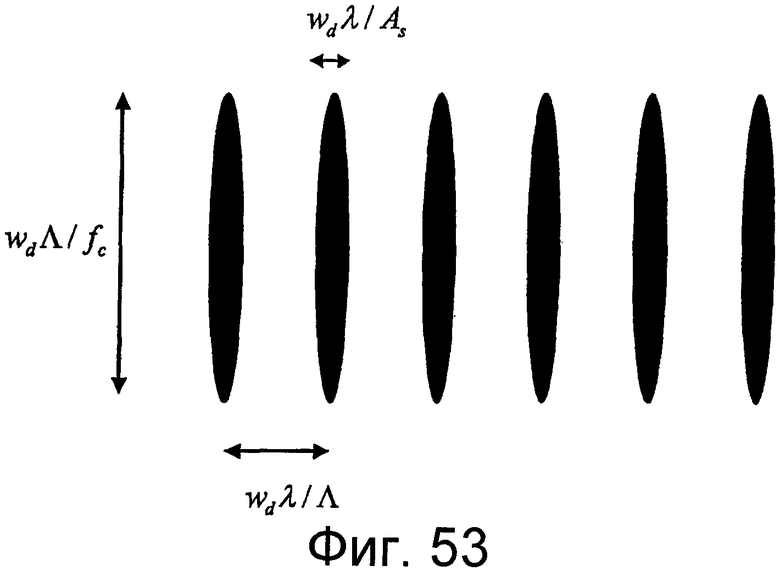
на Фиг.53 показано распределение интенсивности на поверхности объекта, освещенного согласно варианту осуществления изобретения, который изображен на Фиг.51, и
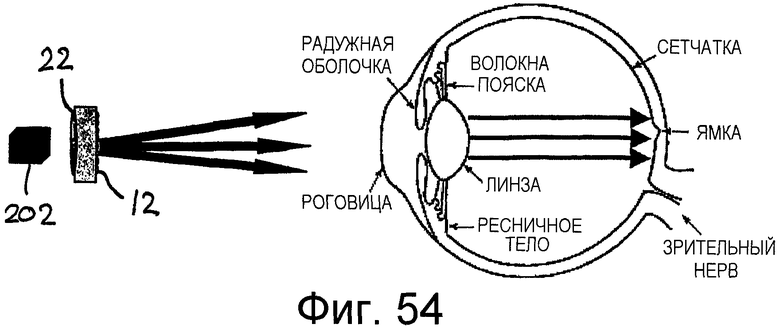
на Фиг.54 показано (случайное) облучение глаза человека согласно варианту осуществления изобретения, изображенного на Фиг.51.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На Фиг.1 схематично показан измерительный преобразователь 10 смещения согласно настоящему изобретению с линейной структурой 12, состоящей из цилиндрических линз 18. Фокусное расстояние цилиндрических линз 18 равно f1. Входная плоскость 14 расположена на расстоянии, равном фокусному расстоянию f1 линз 18, и является перпендикулярной к направлению 16 распространения входного светового излучения, исходящего от объекта (не показан). В этом варианте осуществления изобретения, относительно измерительного преобразователя 10 смещения, часть поверхности объекта (не показан) рассеивает световое излучение, которое попадает на входную плоскость 14. В предпочтительном варианте вышеупомянутую часть поверхности освещают лазером, а формирование изменения спеклов происходит во входной плоскости. При смешении объекта происходит соответствующее перемещение изменений спеклов вдоль входной плоскости 14. Отдельные цилиндрические линзы 18 направляют световое излучение 16, 20 на преломляющую линзу 22, фокусное расстояние которой равно f2 и которая расположена на расстоянии, равном f1+f2, от линейной структуры 12. Кроме того, линза 22 преломляет световое излучение 20, преобразуя его в волны 24, распространяющиеся по направлению к чувствительным элементам 26, 28 и 30 фотоприемника, расположенным в фокальной плоскости линзы 22. Таким способом обеспечивают формирование многократных изображений входной плоскости 14 в выходной плоскости 15. Чувствительные элементы 26, 28, 30 расположены таким образом, чтобы их отдельные поверхности, служащие для приема светового излучения, совпадали с выходной плоскостью 15. Видно, что в области 34 чувствительного элемента 28 сформировано изображение области 32 входной плоскости и что изображения соответствующих областей 36, имеющие одинаковое взаимное расположение относительно соответствующих соседних цилиндрических линз 18, сформированы в той же самой области 34 фотоприемника, образованной чувствительными элементами 26, 28, 30.
Следует отметить, что в данном примере для простоты объяснения принципа действия измерительного преобразователя 10 смещения расстояние между линейным растром 12 и линзой 22 выбрано равным f1+f2. Однако измерительный преобразователь 10 смещения работает при любом расстоянии между линейной структурой 12 и линзой 22. Для обеспечения компактности предпочтительным вариантом может являться тот, в котором вышеупомянутое расстояние устанавливают равным нулю.
Также следует отметить, что в системе формирования изображений, подобной той, которая показана на Фиг.28, угол поворота объекта не приводит к поступательному перемещению изменений спеклов во входной плоскости. Однако смещение объекта по углу поворота обычно приводит к "кипению" спеклов (взаимное изменение интенсивности отдельных пятен спекл-структуры без ее перемещения как единого целого).
Принцип действия измерительного преобразователя смещения из Фиг.1 более подробно показан на Фиг.2. При перемещении изменения 16 спеклов во входной плоскости 14 на расстояние 38, равное ширине Λ0, то есть шагу отдельного оптического элемента 18, происходит развертка соответствующего изображения, сформированного посредством совокупности, состоящей из линзы 22 и соответствующей цилиндрической линзы 18, вдоль области 40 чувствительных элементов 26, 28 и 30 фотоприемника. Это повторяется для других оптических элементов 18, и видно, что при перемещении изменения спеклов на расстояние, равное длине линейной структуры 12, происходит периодическая развертка по фотоприемнику 26, 28, 30 такое количество раз, которое равно количеству отдельных оптических элементов 18 линейного растра 12. Видно, что для обычной картины изменения спеклов во входной плоскости, при которой средний размер спекла сравним с размером 38 отдельного оптического элемента 18, интенсивность электромагнитного поля на чувствительном элементе 26, 28, 30 фотоприемника изменяется между высокой интенсивностью в тот момент, когда яркие области изменений спеклов совмещены с элементами 26, 28, 30 фотоприемника, и низкой интенсивностью в тот момент, когда темные области изменений спеклов совмещены с элементами 26, 28, 30 фотоприемника, и что частота колебаний соответствует скорости смещения изменений спеклов в продольном направлении Δx линейного растра 12, деленной на шаг растра, то есть на расстояние между отдельными соседними оптическими элементами.
Как упомянуто выше, тот же самый принцип действия, в общем случае, применим и для других вариантов осуществления настоящего изобретения вне зависимости от типа используемого оптического узла и вне зависимости от того, формируют ли изображение объекта во входной плоскости 14 или нет.
И вновь со ссылкой на Фиг.1 и Фиг.2, на которых шаг 38 оптического узла 12 обозначен как Λ0, фокусное расстояние отдельных оптических элементов 18 оптического узла 12 равно f1, а фокусное расстояние линзы 22 равно f2, расстояние D0 в плоскости 26 и 30 приемника, представляющее собой амплитуду периодической развертки спекл-структуры, перемещающейся во входной плоскости, определяется следующим уравнением:
В зарегистрированном электрическом сигнале D0 соответствует периоду сигнала, то есть сдвигу фазы на 360°. Это уравнение справедливо для любого расстояния между оптическим узлом 12 и линзой 22.
Для апертуры D системы, которая, например, на Фиг.1 равна диаметру линзы 22, предпочтительно, чтобы выполнялось следующее уравнение:

Кроме того, предпочтительно, чтобы влияние отдельных оптических элементов определялось влиянием линзы, а не дифракцией, то есть:

где k - волновое число в оптическом диапазоне.
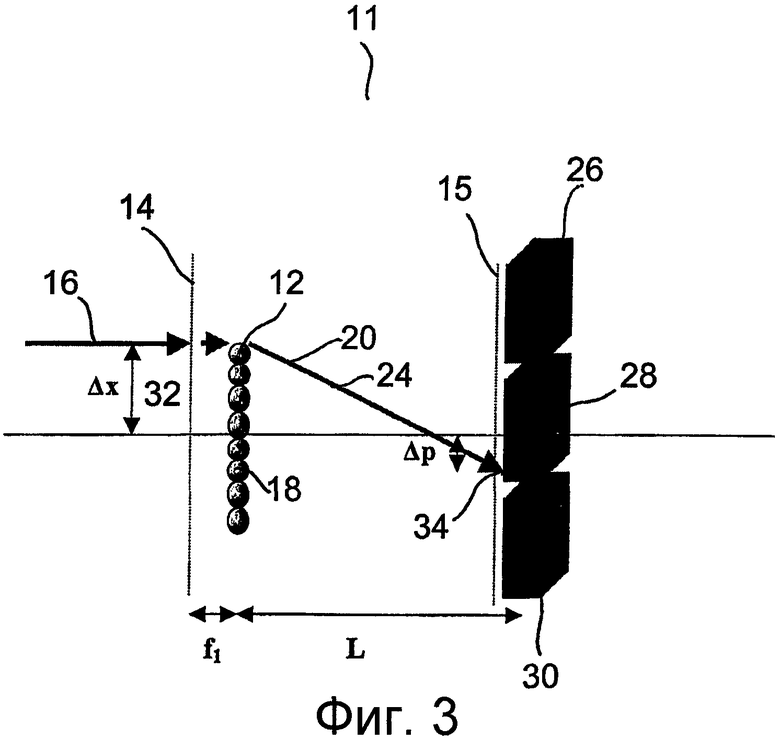
На Фиг.3 схематично показан другой измерительный преобразователь 11 смещения согласно настоящему изобретению без линзы 22, то есть без системы формирования изображений, формирующей изображение входной плоскости 14 в выходной плоскости 15. В этом варианте осуществления изобретения выходная плоскость 15 задана областями приема чувствительных элементов 26, 28, 30 приемника. На Фиг.4 более ясно показано то, что без наличия системы формирования изображений существует небольшое расстояние между сформированными на приемнике 26, 28, 30 изображениями точек 34 для соответствующих точек 32 во входной плоскости 14, имеющих одинаковое взаимное расположение относительно соответствующих оптических элементов 18. Однако точность измерительного преобразователя 11 смещения, тем не менее, может являться достаточной и зависит от фактического размера измерительного преобразователя 11 смещения.
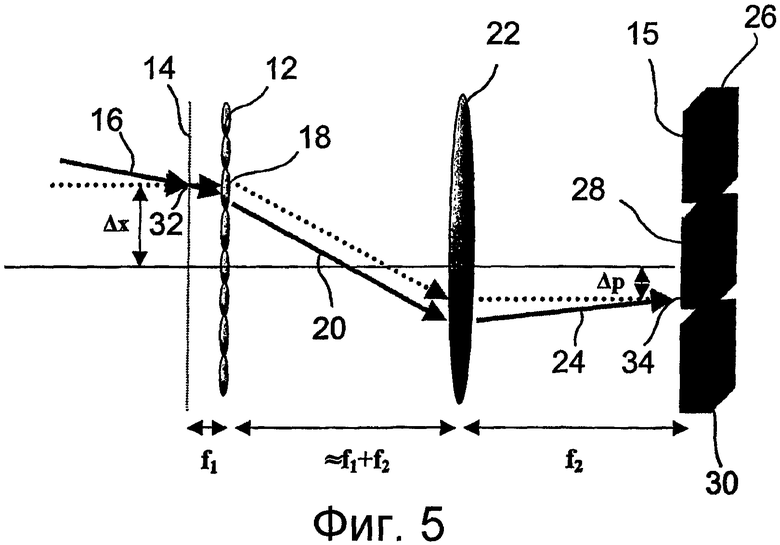
Формирование изображений в измерительном преобразователе смещения из Фиг.1 более подробно показано на Фиг.5, и из этой фигуры видно, что местоположение точки 34 пересечения между чувствительным элементом 28 фотоприемника и падающим светом 24 не зависит от угла 16 наклона электромагнитной волны, падающей на входную плоскость 14. Оно зависит только от взаимного расположения точки 32 пересечения входной плоскости 14 и входной волны 16 относительно соседнего оптического элемента 18.
На Фиг.6 схематично показан измерительный преобразователь смещения, аналогичный измерительному преобразователю смещения из Фиг.1, в котором линейная структура, состоящая из цилиндрических линз, заменена линзовой структурой 42, состоящей из линз Френеля. В альтернативном варианте линейная структура, состоящая из цилиндрических линз, может быть заменена дифракционным оптическим элементом 42.
Также на Фиг.7 схематично показан измерительный преобразователь смещения, аналогичный преобразователю из Фиг.1, в котором линейная структура (одномерный массив), состоящая из цилиндрических линз, заменена линейной фазовой дифракционной решеткой 43 с синусоидальной модуляцией толщины пленки, например в пленке фоторезиста. Фазовая дифракционная решетка может быть изготовлена путем экспонирования пластины с (толстым) слоем фоторезиста посредством интерференционной картины, сформированной посредством скрещивания двух лазерных лучей. Происходит дифракция падающего света, главным образом, в "плюс первый" и в "минус первый" порядки. Кроме того, недифрагированный свет проходит напрямую через фазовую дифракционную решетку.
На Фиг.8 показан альтернативный вариант осуществления измерительного преобразователя смещения из Фиг.3, в котором линейный растр, состоящий из цилиндрических линз, заменен линейным растром 44, состоящим из призм. Две стороны каждой призмы преломляют входящие лучи света, направляя их на два соответствующих чувствительных элемента 26, 30.
Принцип действия измерительного преобразователя смещения из Фиг.8 более ясно проиллюстрирован на Фиг.9, на которой показано, что при прохождении изменения спеклов через линейную призменную структуру 44 в его продольном направлении изменение спеклов попеременно направляют на два соответствующих чувствительных элемента 26, 30.
На Фиг.10 показан аналогичный вариант осуществления измерительного преобразователя смещения, в котором линейная структура, состоящая из цилиндрических линз, заменена линейной структурой 45, состоящей из укороченных призм. Как и ранее, две стороны каждой призмы преломляют входящие лучи света, направляя их на два соответствующих чувствительных элемента 26, 30, в то время как верхняя поверхность пропускает или преломляет входящие лучи, направляя их на третий чувствительный элемент 28 приемника.
Принцип действия измерительного преобразователя смещения из Фиг.10 более ясно проиллюстрирован на Фиг.11, на которой показано, что при прохождении изменения спеклов через линейный растр 45, состоящий из укороченных призм, в его продольном направлении изменение спеклов попеременно направляют на три соответствующих чувствительных элемента 26, 28, 30 приемника.
Следует отметить, что направление распространения волн, преломленных призмами, зависит от угла наклона направления распространения входного светового излучения. Также следует отметить, что сдвиг фаз между сигналами приемника является постоянным. Существенное преимущество этих вариантов осуществления настоящего изобретения состоит в том, что сдвиг фаз определяется геометрической конфигурацией оптического узла и не зависит от месторасположения чувствительных элементов приемника. Другое преимущество состоит в том, что применение призм облегчает использование приемников малого размера.
На Фиг.12 показан вариант 80 осуществления изобретения, функционирующий аналогично лазерному доплеровскому анемометру. Свет 82, излученный лазером 84, представляющим собой точечный источник, коллимируют посредством линзы 86, и коллимированным световым излучением освещают структуру 12, состоящую из цилиндрических линз. Линзы 88 и 90 образуют телескоп, формирующий изображение фокальных точек цилиндрических линз 12 в измеряемом объеме 92, за счет чего в объеме 92, в котором производят измерение, формируют совокупность прямых и равноотстоящих плоскостей 94 интерференционных полос. Видно, что изображение первых областей, в которых находятся интерференционные полосы 94, сформировано в той же самой второй области 96 в источнике 84 лазерного излучения.
На Фиг.13 показан другой вариант 100 осуществления изобретения, аналогичный варианту 80 осуществления изобретения, изображенному на Фиг.12, однако в этом варианте осуществления изобретения вместо показанной на Фиг.12 структуры, состоящей из цилиндрических линз, использована структура 12, состоящая из сферических линз. Это приводит к наличию равноотстоящих и прямолинейных цилиндрических фокальных линий 94.
Частицы или поверхность твердого тела, проходящие через интерференционные полосы, созданные в измерительном объеме, рассеивают световое излучение. Приемник, расположенный в произвольном месте, формирует модулированный сигнал, частота которого определяется составляющей скорости, перпендикулярной к интерференционным полосам, деленной на расстояние между интерференционными полосами.
На Фиг.14 показан вариант 102 осуществления изобретения, также изображенный на Фиг.1, который предназначен для измерения скорости 106 частицы. Луч 104 лазера сфокусирован в объем 108, в котором осуществляют измерение, изображение которого сформировано в входной плоскости 15 системы с линзой f1. При прохождении частицы 110 через объем 108, в котором осуществляют измерение, ее изображение 112 проходит через систему 12, состоящую из цилиндрических линз, и каждый из приемников 26, 28, 30 осуществляет прием осциллирующего оптического сигнала, который аналогичен сигналу, сформированному посредством интерференционных полос в лазерном доплеровском анемометре. Следовательно, каждый чувствительный элемент 26, 28, 30 приемника осуществляет прием светового излучения от частицы 110 таким образом, как будто бы частица 110 проходит через совокупность интерференционных полос, что ниже обозначают на виртуальные интерференционные полосы. На Фиг.15 показан график выходного сигнала 114, поступающего из одного из чувствительных элементов, формирование которого осуществлено в ответ на осциллирующий оптический сигнал. Соответствующий сигнал 116 от соседнего чувствительного элемента показан на Фиг.16. Этот сигнал 116 имеет сдвиг по фазе относительно сигнала 114, показанного на Фиг.15, вследствие физического смещения чувствительных элементов.
Поскольку опорные составляющие этих двух низкочастотных сигналов являются, по существу, идентичными, то разность между этими двумя сигналами 114, 116 представляет собой переменный сигнал 118, показанный на Фиг.17. Предпочтительно, чтобы сдвиг фаз между этими двумя чувствительными элементами 26, 28; 28, 30 был, по существу, равен 90° для того, чтобы можно быть вычислить направление скорости частицы, за счет чего устраняют необходимость наличия дорогостоящей ячейки Брэгга. Угол падения лазерного луча не является критическим. Система рассеяния в прямом направлении обеспечивает наибольший уровень сигналов, однако система рассеяния в обратном направлении может оказаться предпочтительной по иным причинам.
Видно, что в этом варианте 102 осуществления изобретения первые области объема 108, в котором осуществляют измерение, то есть соответствующие виртуальным интерференционным полосам, отображают на одну и ту же вторую область на чувствительном элементе.
На Фиг.18 показано то, каким образом задают входную плоскость 14 системы. В варианте 10 осуществления изобретения, показанном на Фиг.1, изображение выходной плоскости 15, заданной посредством поверхностей чувствительных элементов 26, 28, 30, во входной плоскости 14 формируют посредством совокупности, состоящей из линзовой структуры 12 и линзы 22. Следовательно, элемент 18 оптического узла 12 осуществляет фокусировку лучей 120, излученных из выходной плоскости 15, на входную плоскость 14.
На Фиг.19 показано то, каким образом задают входную плоскость 14 в варианте 11 осуществления изобретения, изображенном на Фиг.3. В этом варианте 11 осуществления изобретения система формирования изображений отсутствует, однако элемент 18 оптического узла, тем не менее, обеспечивает фокусировку лучей 120, излученных из выходной плоскости 15, на входную плоскость 14.
На Фиг.20 показано то, каким образом задают входную плоскость 14 в варианте осуществления изобретения, изображенном на Фиг.8. В этом варианте осуществления изобретения система формирования изображений также отсутствует, однако элемент оптического узла 44, тем не менее, обеспечивает фокусировку лучей 120, излученных из выходной плоскости 15, на входную плоскость 14.
На Фиг.21-23 показаны различные способы объединения оптических компонентов вышеописанных измерительных преобразователей смещения для обеспечения еще более компактной системы, предназначенной для серийного производства.
На Фиг.24 и Фиг.25 оптические компоненты объединены с призмой для ограничения линейной протяженности системы. На Фиг.25 линза 22, показанная на Фиг.13, заменена вогнутым зеркалом 23.
На Фиг.26 схематично показан оптический узел с периодической структурой в виде двумерной структуры 46, состоящей из укороченных призм, служащей для определения смещения спеклов по двум координатам. На Фиг.27 показано распространение электромагнитных волн 50, преломленных укороченной призмой. Видно, что призма с плоской верхней поверхностью преломляет входящие пучки света таким образом, что направляет их по пяти направлениям к пяти различным соответствующим чувствительным элементам. Сдвиг фаз между выходными сигналами чувствительных элементов приемника зависит исключительно от геометрической конфигурации призменной структуры с плоскими верхними поверхностями. Он не зависит от местоположения чувствительного элемента. Призменная структура 44, 46, 48 облегчает использование чувствительных элементов малого размера.
На Фиг.28 схематично показана система 52 измерительного преобразователя смещения согласно настоящему изобретению, содержащая систему 54 формирования изображений, формирующую изображение части 56 поверхности перемещающегося объекта 58 во входной плоскости 14 измерительного преобразователя 10 смещения, также показанного на Фиг.1. Объект 58 освещают коллимированным лучом 60 лазера, поэтому составляющая скорости вдоль области пересечения входной плоскости 14 и плоскости из Фиг.28, определяемая во входной плоскости 14, равна коэффициенту увеличения системы 54 формирования изображений, умноженному на соответствующую составляющую скорости на поверхности 56.
На Фиг.29 схематично показана система 62 измерительного преобразователя смещения, отличающаяся от системы измерительного преобразователя смещения, показанной на Фиг.28, тем, что в системе 62 отсутствует система 54 формирования изображений, и тем, что объект 58 освещают расходящимся пучком 64 лазера, исходящим из точечного источника, например из лазера поверхностного излучения с вертикальным объемным резонатором (VCSEL), расположенного во входной плоскости 14. В данной области техники хорошо известно, что смещения изменений спеклов во входной плоскости являются вдвое большими, чем соответствующие смещения на поверхности объекта, вне зависимости от расстояния между объектом и входной плоскостью. Следовательно, составляющая скорости вдоль области пересечения входной плоскости 14 и плоскости из Фиг.29, определяемая во входной плоскости 14, является в два раза большей, чем соответствующая составляющая скорости поверхности 56.
На Фиг.30 схематично показана еще одна система 66 измерительного преобразователя смещения согласно настоящему изобретению, содержащая Фурье-преобразующую линзу 70, которая расположена таким образом, что ее Фурье-плоскость, то есть задняя фокальная плоскость линзы 70, совпадает с входной плоскостью 14 измерительного преобразователя 10 смещения, так же показанного на Фиг.1. Объект 68 освещают коллимированным пучком 60 лазера, и составляющая скорости спеклов во входной плоскости вдоль области пересечения входной плоскости 14 и плоскости из Фиг.18 соответствует угловой скорости объекта 68.
Следует отметить, что поступательное смещение объекта 68 не приводит к поступательному перемещению изменений спеклов во входной плоскости. Однако поступательное смещение объекта 68 обычно приводит к "кипению" спеклов.
На Фиг.31 схематично показана система 75 измерительного преобразователя смещения для определения линейного смещения, которая содержит отражающий узел 12, содержащий линейную структуру, состоящую из цилиндрических вогнутых зеркал 18, выполняющих оптическую функцию, аналогичную оптической функции цилиндрических линз, показанных, например, на Фиг.1. Функционирование вышеупомянутого измерительного преобразователя смещения является аналогичным функционированию измерительного преобразователя смещения, показанного на Фиг.3, за исключением того обстоятельства, что оптический узел 12, показанный на Фиг.21, отражает световое излучение, а соответствующий оптический узел 12, показанный на Фиг.3, преломляет световое излучение.
На Фиг.32 схематично показана другая конфигурация 76 отражательной системы согласно настоящему изобретению, предназначена для определения угла поворота, в состав которой также входит отражающий узел 12, содержащий линейную структуру, состоящую из цилиндрических вогнутых зеркал 18. Изображенная на фигуре система функционирует аналогично системе, показанной на Фиг.30, однако следует отметить, что в системе 76 функции линз 22 и 70 системы, показанной на Фиг.30, объединены в одной линзе 22.
На Фиг.33 схематично показана система 77 измерительного преобразователя смещения, предназначенная для определения двумерного вращения. Система 77 является аналогичной одномерной системе 76, показанной на Фиг.32, однако линейная структура, состоящая из цилиндрических вогнутых зеркал, заменена двумерной структурой 12, состоящей из сферических вогнутых зеркал 18, и добавлены два чувствительных элемента 27, 29 фотоприемника, которые в совокупности с чувствительным элементом 28 облегчают регистрацию перемещения спеклов в направлении, по существу, перпендикулярном к направлению перемещения, зарегистрированного посредством совокупности чувствительных элементов 26, 28, 30 фотоприемника.
На Фиг.34 схематично показана аналогичная система 78 измерительного преобразователя смещения, предназначенная для определения двумерного смещения. Система 77 является аналогичной одномерной системе 75, показанной на Фиг.31, однако линейная структура, состоящая из цилиндрических вогнутых зеркал, заменена двумерной структурой 12, состоящей из сферических вогнутых зеркал 18, и добавлены два чувствительных элемента 27, 29 фотоприемника, которые в совокупности с чувствительным элементом 28 облегчают регистрацию перемещения спеклов в направлении, по существу, перпендикулярном к направлению перемещения, зарегистрированного посредством совокупности чувствительных элементов 26, 28, 30 фотоприемника.
На Фиг.35 на виде спереди показана система 130 измерительного преобразователя смещения, предназначенная для одновременного определения двумерного смещения и вращения в плоскости. Система 130 содержит лазер 132 поверхностного излучения с вертикальным объемным резонатором (VCSEL), расположенный позади коллимирующей линзы 134, обеспечивая, тем самым, освещение объекта коллимированным световым пучком. Три линзо-растровых структуры 136, 138, 140 с цилиндрическими линзами расположены в общей плоскости с взаимным угловым разнесением, составляющим приблизительно 120°, и служат для определения составляющих скорости, указанных соответствующими стрелками 142, 144, 146. Позади соответствующих линзо-растровых структур расположены приемники 148, 150, 152 для преобразования принятого светового излучения в электрический сигнал. Составляющие Vx и Vy скорости определяются системой 154 координат. Vx, Vy и скорость Vϕ вращения вычисляют согласно уравнениям 156.
На Фиг.36 на виде спереди показана система 160 измерительного преобразователя смещения, предназначенная для одновременного определения двумерного смещения и вращения в плоскости. Система 160 содержит лазер 162 поверхностного излучения с вертикальным объемным резонатором (VCSEL), который на фигуре расположен позади коллимирующей линзы 164, обеспечивая, тем самым, освещение объекта коллимированным световым пучком. Четыре линзо-растровых структуры 166, 168, 170, 172 с цилиндрическими линзами расположены в общей плоскости с взаимным угловым разнесением, составляющим приблизительно 90°, и служат для определения составляющих скорости, указанных соответствующими стрелками 174, 176, 178, 180. Позади соответствующих линзо-растровых структур расположены приемники 182, 184, 186, 188 для преобразования принятого светового излучения в электрический сигнал. Составляющие Vx и Vy скорости, а также скорость вращения Vϕ вычисляют согласно уравнениям 190.
На Фиг.37 показана основная конфигурация чувствительного элемента 80 согласно одному из вариантов осуществления настоящего изобретения. На Фиг.38 показан график сигнала приемника 82, а на Фиг.39 показан график спектра 84 мощности сигнала приемника. Следует отметить, что низкочастотная часть 86 и вторая гармоника 88 спектра 84 являются весьма значительными. Наличие низкочастотного шума приводит к отклонению скользящего среднего значения, что вносит существенные погрешности при определении скорости на основании регистрации переходов через нулевой уровень сигнала. Ширина приемника выбрана таким образом, чтобы обеспечить оптимальное подавление третьей гармоники основной частоты. Предполагают, что чувствительный элемент имеет прямоугольную форму и, следовательно, функция спектра мощности приемника представляет собой sinc-функцию. Для устранения каждой третьей гармоники выходного сигнала приемника ширина каждого чувствительного элемента выбрана, по существу, равной одной третьей части от общей ширины матрицы приемника, которая выбрана равной ширине периодической развертки спекл-структуры, проходящей через входную плоскость. На Фиг.40 показана конфигурация из двух согласованных чувствительных элементов 92, 94. Расстояние между элементами соответствует сдвигу фаз, равному 180°. Для подавления низкочастотной части сигналов и частот четных гармоник основной частоты производят вычитание выходных сигналов, поступающих из чувствительных элементов. График разностного сигнала 96 показан на Фиг.41, а график спектра 98 мощности показан на Фиг.42. Продемонстрировано явно заметное подавление низкочастотной части 86 и второй гармоники 88 по сравнению с Фиг.39.
На Фиг.43 показана конфигурация приемника 100 со сдвигом фазы почти на 90°, в которой два сигнала 102, 104, полученных в результате вычитания, создают посредством шести приемников равного размера. Два сигнала 102, 104, полученных в результате вычитания, имеют сдвиг по фазе, равный 60°, и, следовательно, являются пригодными для определения, например, направления поступательного перемещения спеклов или фазы с субрадианным разрешением. В этой конфигурации 100 точный сдвиг фазы на 90° не может быть достигнут без изменения ширины приемника 106 и, следовательно, без ослабления степени подавления третьей гармоники. Сигналы 108, 110, полученные в результате вычитания, со сдвигом фазы почти на 90° показаны на графике из Фиг.44, а на Фиг.45 показана фазовая диаграмма 112 сигналов 108, 110. Фазовая диаграмма 112 имеет эллиптическую форму, которая облегчает определение направления поступательного перемещения спеклов и, в конечном счете, обеспечивает субрадианную точность измерений. Однако вследствие эллиптической формы фазовой диаграммы данная конфигурация является чувствительной к шумам.
Конфигурация приемника 114, показанная на Фиг.46, обеспечивает схему приемника со сдвигом фазы, по существу, точно на 90°. Два сигнала 116, 118, полученных в результате вычитания, создают посредством семи приемников трех различных размеров. Эти два сигнала 116, 118 имеют сдвиг по фазе, равный 90°, и, следовательно, облегчают определение направления скорости объекта и фазы с субрадианным разрешением. На Фиг.47 показан график сигналов 120, 122, полученных в результате вычитания, со сдвигом фазы на 90°, а на Фиг.48 показана соответствующая фазовая диаграмма 124. Фазовая диаграмма 124 имеет форму круга, что облегчает определение направления скорости объекта и обеспечивает субрадианную точность измерений. Круглая форма кривых на фазовой диаграмме обеспечивает меньшую чувствительность этой конфигурации к шумам.
На Фиг.49 и Фиг.50 показаны предпочтительные варианты осуществления настоящего изобретения в миниатюре. Рабочее расстояние между входной плоскостью и поверхностью мишени равно 40 мм. Шаг цилиндрической линзовой структуры равен 30 мкм (микрометров), а фокусное расстояние равно 38,7 мкм. Расстояние между чувствительными элементами 26, 28 равно 1,6 мм, а расстояние между линзой 22 и чувствительными элементами 26, 28 равно 3,2 мм.
Ниже со ссылкой на Фиг.51-54 раскрыт вариант 200 осуществления настоящего изобретения, в котором оптический узел 12 представляет собой цилиндрическую линзовую структуру 12 и используется как для пропускания когерентного света к объекту 204, так и для приема светового излучения, исходящего от объекта 204. В данном варианте осуществления изобретения световой пучок, излученный лазером 202 поверхностного излучения с вертикальным объемным резонатором (VCSEL), коллимируют посредством линзы 22 и разделяют на множество пучков посредством цилиндрической линзовой структуры 12 для освещения объекта 204. Это приводит к двум существенным преимуществам: 1) сигналы, обусловленные наличием спеклов, являются модулированными за счет множества пучков, в силу чего спектр спекл-структуры сконцентрирован в частотном диапазоне, являющемся оптимизированным для системы; 2) классификация степени безопасности системы основана на мощности в каждом из отдельных пучков.
Во многих областях применения могут возникать проблемы, связанные с прямым доступом к испускаемому излучению, поскольку длина волны находится в ближнем инфракрасном диапазоне (приблизительно 850 нанометров (нм)), в котором правила техники безопасности являются наиболее строгими. Это обусловлено тем, что глаз может фокусировать излучение на сетчатке, а чувствительность глаза в этой области длин волн является чрезвычайно низкой. Это означает, что может возникнуть повреждающее действие излучения без надлежащего предупреждения от системы органов чувств, то есть визуального воздействия. Следовательно, этот вопрос является жизненно важным для пользователя систем на основе лазеров, в особенности в потребительских товарах.
В стандарте техники безопасности при работе с лазерами, выпущенном Международной электротехнической комиссией (МЭК): "Безопасность лазерных изделий, Часть 1, МЭК 60825-1, издание 1.1, 1998-01" ("Safety of laser products, Part 1, IEC 60825-1, Ed. 1.1, 1998-01") описан основной источник опасности повреждения сетчатки глаза для видимого и ближнего инфракрасного диапазона. Конкретной категории лазерных изделий присваивают соответствующее значение максимального допустимого уровня излучения (AEL). Низшей категорией лазерных изделий являются изделия класса 1 (Class 1). Желательно, чтобы изделия на основе лазеров, предназначенные для потребительского рынка, подпадали под требования класса 1 (Class 1).
Для коллимированного светового пучка диаметром 1 мм с длиной волны, равной 850 нм, допустимый уровень излучения (AEL) равен 0,24 мВт (милливатта), ниже которого не предвидят возникновения каких-либо повреждений сетчатки глаза. Однако для большинства областей применения этот уровень является недостаточным для формирования приемлемых сигналов.
Однако в продемонстрированном варианте осуществления изобретения лазер 202 поверхностного излучения с вертикальным объемным резонатором (VCSEL) излучает световой пучок диаметром 0,4 мм на длине волны 850 нм. Дифракционно-ограниченное пятно на сетчатке равно приблизительно 0,12 мм при условии, что диаметр глаза равен приблизительно 50 мм. В случае излучения коллимированных световых пучков, схематично показанных на Фиг.54, с угловым разнесением, равным 3°, на сетчатке формируются отдельные пятна, расстояние между которыми приблизительно равно 2,5 мм. По существу, отсутствует какое-либо перекрытие пятен, и, следовательно, требование в отношении максимального допустимого уровня излучения (AEL) должно выполняться для каждого из отдельных пятен. Однако общая мощность излучения лазера поверхностного излучения с вертикальным объемным резонатором (VCSEL) может быть в несколько раз большей по величине, чем допустимый уровень излучения (AEL).
За счет освещения объекта множеством пучков происходит модуляция спеклов периодической структурой, которая соответствует периодической линзо-растровой структуре. Это вызывает эффект, подобный муаровому эффекту, в результате чего ожидают получения более сильного сигнала. Этот вариант осуществления изобретения схематично показан на Фиг.51. На Фиг.53 показано распределение интенсивности на освещенном объекте 204 с приведенными ниже параметрами:
As - диаметр апертуры в месте расположения линзового растра;
wd - расстояние до объекта;
λ - длина волны испускаемого света;
Λ0 - ширина отдельных линз в структуре, то есть шаг структуры;
fc - фокусное расстояние линзовой структуры.
Для варианта осуществления изобретения, в котором As=1 мм, wd=3 мм, λ=1 мкм, Λ0=15 мкм и fc=30 мкм, расстояние между пятнами по горизонтали равно 200 мкм, а высота пятен равна 1,5 мм. Спектр спекл-структуры на линзовой структуре имеет максимум в том месте спектра, которое определяется произведением длины волны на расстояние от объекта до линзовой структуры, деленным на расстояние между пятнами, которое определяют из выражения, показанного на Фиг.53.
Для определения двумерного перемещения может быть предусмотрено наличие двух перпендикулярных перекрывающихся линзовых структур, расположенных на траектории прохождения света.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической фокусировки объектива | 1983 |
|
SU1151112A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ГЛАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2257136C2 |
| Устройство для автоматической фокусировки объектива съемочного аппарата | 1986 |
|
SU1647499A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271014C2 |
| Устройство для обработки спекл-фотографий | 1990 |
|
SU1778512A1 |
| Система формирования широкополосного гиперспектрального изображения на основе сжатого зондирования с нерегулярной дифракционной решеткой | 2014 |
|
RU2653772C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262112C2 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| Устройство для контроля зеркальной фотокамеры | 1991 |
|
SU1818616A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2016 |
|
RU2648029C2 |







Система оптического измерительного преобразователя смещения для детектирования смещения объекта, содержащая источник когерентного света для освещения, по меньшей мере, части объекта пространственно-когерентным светом, фотоприемник, по меньшей мере, с одним чувствительным элементом для преобразования оптического сигнала в соответствующий электронный сигнал и оптический узел, по меньшей мере, с тремя оптическими элементами для отображения различных областей входной плоскости для приема светового излучения, исходящего от объекта, по существу, на ту же область фотоприемника, за счет чего осуществляют формирование осциллирующего оптического сигнала, имеющего частоту, соответствующую скорости указанного объекта. 27 з.п. ф-лы, 54 ил.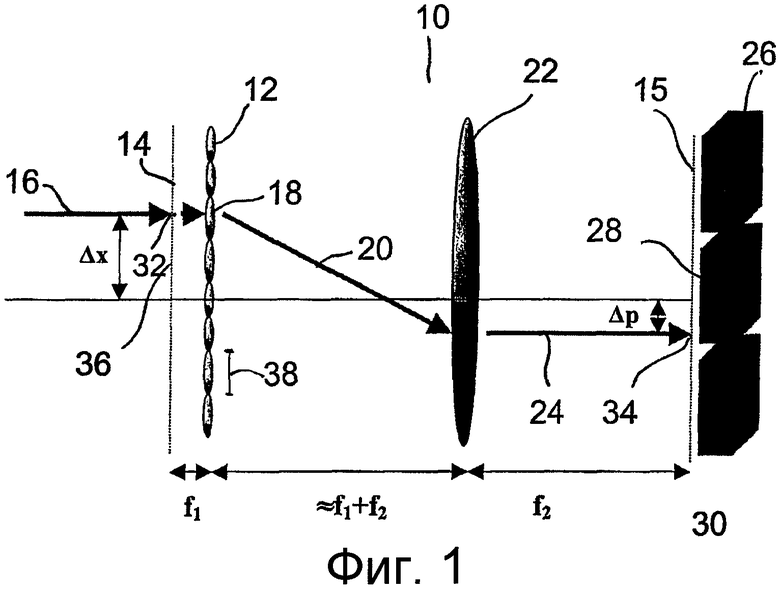
источник когерентного света для освещения, по меньшей мере, части объекта пространственно-когерентным светом,
фотоприемник с, по меньшей мере, одним чувствительным элементом для преобразования оптического сигнала в соответствующий электронный сигнал, и
оптический узел, по меньшей мере, с тремя оптическими элементами для отображения различных областей входной плоскости для приема светового излучения, исходящего от объекта, по существу, на ту же область фотоприемника за счет чего осуществляют формирование осциллирующего оптического сигнала, имеющего частоту, соответствующую скорости указанного объекта.
| Устройство для расшифровки сдвиговых спекл-интерферограмм | 1988 |
|
SU1552005A1 |
| JP 61247903 A, 05.11.1986 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНОГО МАТЕРИАЛА | 1992 |
|
RU2040501C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ ПРЯМОГО ЛУЧА ПРИ ПРИЕМЕ МНОГОЛУЧЕВОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2245603C2 |
| JP 3110476 A, 10.05.1991 | |||
| JP 6011309 A, 21.01.1994. | |||

