Уровень техники
Настоящее изобретение, в общем, относится к трубопроводам и более конкретно к системам и способам определения местоположения скребка в трубопроводе на основе объема текучей среды, вытесняемой скребком из трубопровода.
Устройства, известные как скребки, как правило, помещаются и проталкиваются через трубопроводы посредством потока текучей среды в них. Скребки могут выполнять различные функции в трубопроводе, в том числе очистку трубопровода, чтобы обеспечить беспрепятственное протекание потока текучей среды через него, проверку внутренней части трубопровода и/или разделение различных текучих сред, протекающих через трубопровод. Скребки для трубопроводов используются в ходе фазы откачки при пусконаладочных работах. Эта откачка может осуществляться после того, как трубопровод наполнен водой и находится под давлением, чтобы испытать, имеет ли он какие-либо дефекты и допускает ли он выдерживание давлений, которые испытываются при обычном режиме работы трубопровода. После того как испытание завершено, скребок (или ряд скребков) типично помещается в трубопровод и выступает в качестве жесткого барьера между водой и газом, таким как воздух, который используется для того, чтобы вытеснять воду из трубопровода.
Желательно знать местоположение скребка по мере того, как он проходит через трубопровод. Если местоположение скребка неизвестно, приемник скребков, который размещен с одного конца трубопровода, может быть снят до того, как скребок фактически достигнет приемника. Если обнаружено, что скребок отсутствует или не принят, простой, необходимый для того, чтобы заменить приемник скребков и извлечь скребок из трубопровода, может быть дорогостоящим. Разработаны различные способы обнаружения местоположения скребка. Один такой способ влечет за собой использование акустической системы отслеживания, в которой акустический сигнал издается из устройства, которое крепится к скребку. Акустический сигнал имеет заранее заданную частоту, и этот сигнал может отслеживаться по мере того, как скребок проходит через трубопровод. Другой способ заключается в том, чтобы отслеживать давление текучей среды в трубопроводе и давление газа, который используется для того, чтобы вытеснять текучую среду из трубопровода. Тем не менее, вследствие сжимаемости газа и других факторов окружающей среды использование измерений давления для того, чтобы определять местоположение скребка в трубопроводе, обычно является неточным. В другом способе радиоактивный источник может быть помещен в скребок, и детектор, размещенный вне трубы, отвечает на излучение, испускаемое скребком по мере того, как он проходит через детектор. К сожалению, радиоактивный источник является опасным для использования, и необходимо следовать специальным процедурам и обучению при работе с радиоактивным источником. Следовательно, существует потребность в простом, точном способе отслеживания местоположения скребка в трубопроводе.
Сущность изобретения
Способы определения местоположения скребка в трубопроводе, к примеру подводном трубопроводе, включают в себя измерение количества текучей среды, вытесняемой посредством скребка из трубопровода, и вычисление местоположения скребка в трубопроводе на основе объема вытесненной текучей среды. Количество текучей среды, вытесняемой посредством скребка, может быть измерено с помощью расходомера, размещенного рядом с выходом трубопровода. Дополнительно, местоположение скребка может быть вычислено с помощью вычислительной машины. Местоположение скребка затем может быть передано посредством, например, акустической телеметрии на морском дне или под водой в приемное устройство для приема и отображения местоположения.
Системы определения местоположения скребка в трубопроводе включают в себя расходомер, размещенный в трубопроводе, для определения количества текучей среды, вытесняемой скребком из трубопровода. Расходомер может быть размещен рядом с выходом трубопровода. Системы также могут включать в себя вычислительную машину для вычисления местоположения скребка на основе объема текучей среды и приемное устройство для приема и отображения местоположения скребка. Приемное устройство может быть размещено рядом с поверхностью водного пространства или земли. Системы дополнительно могут включать в себя передающее устройство для передачи данных из расходомера в вычислительную машину и передающее устройство для передачи местоположения скребка из вычислительной машины в приемное устройство.
Краткое описание чертежа
Чертеж - это вид сбоку и сверху системы определения местоположения скребка в подводном трубопроводе.
Подробное описание изобретения
Скребок может быть вставлен с одного конца трубопровода и проталкиваться с помощью сжатого газа к другому концу трубопровода. Скребок может быть помещен в трубопроводе за текучей средой, такой как вода, используемая для целей испытаний в ходе пусконаладочных работ. Трубопроводом может быть, например, трубопровод, проходящий под землей, под водой или под тем и другим для транспортировки углеводородов. Местоположение скребка по мере того, как он проходит через трубопровод, может быть определено посредством измерения объема текучей среды, вытесняемой из скребка, и последующего вычисления местоположения скребка на основе этого объема текучей среды. Этот способ определения местоположения скребка является относительно точным. При использовании в данном документе "количество" относится к скорости массового и/или объемного расхода текучей среды в течение заданного периода времени. После того как скребок достигает приемника скребков на выходе трубопровода, трубопровод может быть использован для своей основной цели транспортировки конкретной текучей среды. Возможность точно определять местоположение скребка обеспечивает то, что не возникает простоев вследствие ошибочного предположения того, что скребок извлечен из трубопровода, и последующего обнаружения того, что он по-прежнему остается там. По сути, затраты на этот простой могут быть устранены.
Чертеж подробнее иллюстрирует то, как может быть определено местоположение скребка 26. Он конкретно показывает вариант осуществления системы определения местоположения скребка 26 в подводном трубопроводе 10. Подводный трубопровод 10 идет с одного или обоих концов над поверхностью 14 водного пространства 12 в место на глубине ниже поверхности 14, например на морском дне. Альтернативно, трубопровод 10 может оканчиваться с одного или обоих концов ниже поверхности 14, например в подводном устье скважины, опорной плите или терминале. Следует понимать, что трубопровод 10 может размешаться в различных других положениях, например между двумя различными точками в воде, между поверхностью земли и позицией под водой или между двумя различными точками под землей. Расходомер 16 помещается рядом с выходом трубопровода 10 для измерения количества текучей среды, выходящей из трубопровода 10. В вариантах осуществления расходомер 16 может содержать измеритель скорости массового и/или объемного расхода, который измеряет скорость расхода текучей среды (т.е. единицу массы и/или объема на единицу времени), измеритель суммарного объемного расхода, который измеряет суммарный объем текучей среды, выходящей из трубопровода в течение заданного периода времени, измеритель суммарного массового расхода, который измеряет суммарную массу текучей среды, выходящей из трубопровода в течение заданного периода времени, или их сочетания. Примеры подходящих расходомеров включают в себя, но не только, турбинный расходомер, преобразователь массового расхода, расходомерные диафрагмы и сочетания вышеозначенного.
Скребок 26 может быть помещен в трубопроводе 10 за текучей средой, находящейся в нем. Газовый насос или компрессор в таком случае может быть использован для того, чтобы вызывать перепад давлений на концах скребка 26, тем самым вынуждая скребок 26 перемещаться через трубопровод 10. Устройство, подходящее для перемещения через внутреннюю часть трубопровода, может быть использовано в качестве скребка 26. Конкретный тип скребка, который должен быть использован, и его форма могут зависеть от нескольких факторов, таких как тип и объем текучей среды, которая должна быть удалена посредством скребка, и назначение использования скребка. В одном варианте осуществления скребок 26 может быть использован для того, чтобы проверять внутреннюю часть трубопровода 10. В другом варианте осуществления скребок 26 может быть использован для того, чтобы вытеснять текучую среду из трубопровода 10, например, в ходе фазы откачки при пусконаладочных работах. В еще одном другом варианте осуществления скребок 26 может быть использован для того, чтобы отделять разнородные текучие среды друг от друга. В еще одном другом варианте осуществления скребок 26 может быть использован для того, чтобы очищать внутреннюю часть трубопровода 10 посредством удаления твердых или полутвердых отложений из него. Примеры типов скребков включают в себя, но не только, скребки на оправке, которые типично содержат центриольную трубку или оправку и, по меньшей мере, один компонент, крепящийся к оправке, пенные скребки, которые типично содержат полиуретановую пену и полиуретановые диски и/или абразивные материалы, постоянно крепящиеся к ним, скребки из сплошной отливки, которые типично содержат формованный полимер, сферические скребки, которые типично содержат твердотельную структуру или гибкий материал, накачанный гликолем и/или водой, гелевые скребки, которые типично содержат ряд загущенных жидких систем, и средства линейного наблюдения, предназначенные для того, чтобы собирать данные.
По мере того как скребок 26 проталкивается от входа к выходу трубопровода 10, расходомер 16 измеряет количество текучей среды, которая выходит из трубопровода 10 впереди скребка. В варианте осуществления этим количеством может быть скорость расхода текучей среды. В этом случае период времени, в течение которого измеряется скорость расхода, может быть определен. В альтернативных вариантах осуществления количеством может быть объем текучей среды или масса текучей среды.
Система на чертеже также может включать в себя вычислительную машину 18 для записи и вычисления местоположения скребка 26 на основе количества текучей среды, измеренного посредством расходомера 16. Вычислительная машина 18 может быть размещена над (как показано) или под поверхностью 14 воды 12. Дополнительно, она может быть размещена на конечное расстояние от других компонентов в системе, как показано, или она может быть интегрирована или расположена рядом с другими компонентами, такими как расходомер 16 или приемное устройство 22. Данные, собираемые расходомером 16, могут передаваться в вычислительную машину 18, как указано посредством пунктирной линии 20. Любое подходящее средство передачи может быть использовано. В варианте осуществления передача этих данных может осуществляться посредством акустической телеметрии, которая является беспроводной методикой, которая хорошо работает под водой. Хотя не показана, система акустической телеметрии HAL-AT, предлагаемая компанией Halliburton, Inc., должна быть подходящей для выполнения передачи. Система акустической телеметрии может включать в себя блок преобразователя и подводное передающее устройство. В альтернативных вариантах осуществления данные могут передаваться между расходомером 16 и вычислительной машиной 18 посредством радиосигнала или посредством проводной системы, такой как электрический сигнал или волоконно-оптическая система.
Вычислительная машина 18 может быть запрограммирована, чтобы вычислять текучее местоположение скребка на основе количества текучей среды, измеренного посредством расходомера 16. В частности, вычислительная машина 18 может быть запрограммирована, чтобы сначала преобразовывать количество текучей среды в величину объема, если только не измерена величина суммарного объема. Например, если скорость массового или объемного расхода текучей среды измеряется, скорость расхода может быть умножена на общее время, в течение которого измеряется скорость расхода, чтобы получить суммарную массу или объем текучей среды. Если суммарная масса текучей среды вычисляется или измеряется, эта масса может быть поделена на удельный вес, чтобы получить объем текучей среды. Объем, вычисляемый посредством вычислительной машины 18, представляет объем текучей среды, которая вытеснена посредством скребка. Вычислительная машина 18 также может быть запрограммирована, чтобы использовать этот объем, чтобы определять объем трубопровода, через который проходит скребок, в соответствии со следующим уравнением:
VP=VT-VF,
где VP представляет объем, через который прошел скребок, VT представляет общий объем внутри трубопровода, a VF представляет объем текучей среды, вытесняемой посредством скребка. Длина трубопровода, через которую прошел скребок, затем может быть определена в соответствии со следующим уравнением:
L=VP/(π*r2),
где L представляет длину трубопровода, через которую прошел скребок, а r представляет внутренний радиус трубопровода. Эта L также указывает местоположение скребка относительно входа трубопровода 10. Вычислительная машина 18 после этого может записывать и/или передавать вычисленное местоположение скребка.
Система, показанная на чертеже, дополнительно включает в себя приемное устройство 22 для приема и отображения местоположения скребка 26 и любой другой требуемой информации, такой как объем текучей среды, которая вышла из трубопровода 10. Эта информация может передаваться от вычислительной машины 18 в приемное устройство 22, как указано пунктирной линией 24. В вариантах осуществления эта передача может осуществляться посредством акустической телеметрии, электрического или оптического сигнала или радиосигнала, как описано выше. Приемное устройство 22 может быть размещено в позиции, в которой данный мониторинг местоположения скребка позволяет осуществлять доступ и просматривать информацию, отображаемую посредством приемного устройства 22. В варианте осуществления приемное устройство может быть размещено рядом с поверхностью 14, как показано. При необходимости могут быть выполнены корректировки в скорость расхода газа, нагнетаемого в трубопровод 10, на основе отображаемой информации. Вышеописанный процесс определения местоположения скребка в трубопроводе 10 может повторяться непрерывно, тем самым позволяя быть отслеживаемым перемещению скребка вниз по трубопроводу.
В альтернативном варианте осуществления, аналогичном показанному на чертеже, транспортное средство с дистанционным управлением (ROV), имеющее видеокамеру, может быть использовано для того, чтобы считывать расходомер и передавать эти показания оператору на поверхности. Затем оператор может вводить показания в вычислительную машину, которая запрограммирована для того, чтобы вычислять местоположение скребка таким же образом, как описано выше. Далее это местоположение может передаваться способом, описанным выше, в приемное устройство, которое отображает местоположение скребка оператору.
Хотя показаны и описаны примерные варианты осуществления изобретения, их модификации могут выполняться специалистами в данной области техники без отступления от духа и идеи изобретения. Варианты осуществления, описанные в данном документе, являются просто примерными и не предназначены для того, чтобы быть ограничивающими. Многие вариации и модификации изобретения, раскрытые в данном документе, возможны и находятся в рамках области применения изобретения. Использование термина "необязательно" в отношении любого элемента формулы изобретения предназначено для того, чтобы означать то, что настоящий элемент необходим или, альтернативно, необходим. Обе альтернативы предназначены для того, чтобы находиться в рамках области применения формулы изобретения.
Соответственно, область защиты не ограничена описанием, изложенным выше, а ограничена только нижеследующей формулой изобретения, причем эта область включает в себя все эквиваленты предмета формулы изобретения. Все без исключения пункты формулы изобретения включены в данное описание в качестве варианта осуществления настоящего изобретения. Таким образом, пункты формулы изобретения являются дополнительным описанием и служат дополнением для вариантов осуществления настоящего изобретения. Описание ссылок в данном документе не служит признанием того, что они являются предшествующим уровнем техники по сравнению с настоящим изобретением, особенно в отношении всех ссылок, которые могут иметь дату публикации после даты приоритета этой заявки. Сущности всех патентов, заявок на патенты и публикаций, упоминаемых в данном документе, полностью содержатся по ссылке в данном документе.
Изобретение относится к системам и способам определения местоположения скребка в трубопроводе. Местоположение скребка (26) в трубопроводе (10) определяется посредством измерения количества текучей среды, вытесняемой скребком из трубопровода, и вычисления местоположения скребка в трубопроводе на основе объема вытесненной текучей среды. Количество текучей среды, вытесняемой скребком (26), может быть измерено с помощью расходомера (16), размещенного рядом с выходом трубопровода (10). Это количество затем может быть передано в вычислительную машину (18) для вычисления местоположения посредством, например, акустической телеметрии. После этого местоположение скребка (26) может передаваться из вычислительной машины (18) в приемное устройство (22) для приема и отображения местоположения. Технический результат: упрощение определения местоположения скребка в трубопроводе. 2 н. и 25 з.п. ф-лы, 1 ил.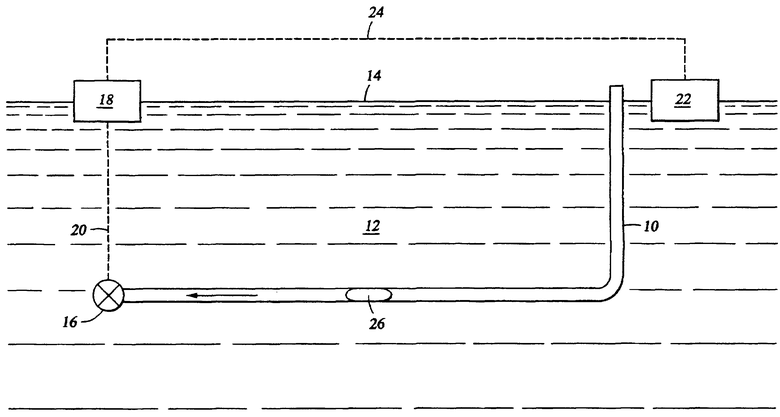
1. Способ определения местоположения скребка в трубопроводе, содержащий этапы, на которых
(a) измеряют количество текучей среды, вытесняемой скребком из трубопровода; и
(b) вычисляют местоположение скребка в трубопроводе на основе количества текучей среды, причем количество текучей среды измеряется с помощью расходомера, размещенного рядом с выходом трубопровода.
2. Способ по п.1, в котором расходомером является измеритель скорости массового расхода, измеритель скорости объемного расхода или и то, и другое.
3. Способ по п.2, в котором вычисление местоположения содержит этап, на котором определяют объем текучей среды, вытесняемой из трубопровода, на основе данных из расходомера.
4. Способ по п.3, в котором вычисление местоположения содержит этапы, на которых вычисляют объем вытесняемой текучей среды из общего объема трубопровода и делят остаток на площадь поперечного сечения трубопровода.
5. Способ по п.1, в котором трубопровод содержит подводный трубопровод.
6. Способ по п.1, дополнительно содержащий этап, на котором передают местоположение скребка в приемное устройство для приема и отображения местоположения.
7. Способ по п.6, в котором приемное устройство размещается рядом с поверхностью водного пространства или земли.
8. Способ по п.6, в котором местоположение скребка передается в приемное устройство посредством акустической телеметрии.
9. Способ по п.6, в котором местоположение скребка передается в приемное устройство посредством электрического сигнала.
10. Способ по п.6, в котором местоположение скребка передается в приемное устройство посредством радиосигнала.
11. Способ по п.1, дополнительно содержащий этап, на котором используют транспортное средство с дистанционным управлением (ROV) для того, чтобы считывать и передавать количество текучей среды из расходомера.
12. Способ по п.1, в котором местоположение скребка вычисляется с помощью вычислительной машины.
13. Способ по п.12, дополнительно содержащий этап, на котором передают количество текучей среды из расходомера в вычислительную машину перед этапом (b).
14. Способ по п.13, в котором количество текучей среды передается посредством акустической телеметрии.
15. Способ по п.13, в котором количество текучей среды передается посредством электрического сигнала.
16. Способ по п.13, в котором количество текучей среды передается посредством радиосигнала.
17. Способ по п.1, дополнительно содержащий этап, на котором повторяют этапы (а) и (b), чтобы отслеживать скребок по мере того, как он проходит через трубопровод.
18. Система определения местоположения скребка в трубопроводе, содержащая
расходомер, размещенный в трубопроводе, для определения количества текучей среды, вытесняемой скребком из трубопровода; и
вычислительную машину для вычисления местоположения скребка на основе количества текучей среды, причем расходомер размещен рядом с выходом трубопровода.
19. Система по п.18, в которой расходомером является измеритель скорости массового расхода, измеритель скорости объемного расхода или и то, и другое.
20. Система по п.18, в которой трубопровод содержит подводный трубопровод.
21. Система по п.18, дополнительно содержащая приемное устройство для приема и отображения местоположения скребка.
22. Система по п.21, в которой приемное устройство размещается рядом с поверхностью водного пространства или земли.
23. Система по п.21, дополнительно содержащая передающее устройство для передачи местоположения скребка из вычислительной машины в приемное устройство.
24. Система по п.23, в которой передающее устройство содержит систему акустической телеметрии, электрическое передающее устройство, радиопередающее устройство или их сочетание.
25. Система по п.18, дополнительно содержащая передающее устройство для передачи данных из расходомера в вычислительную машину.
26. Система по п.25, в которой передающее устройство содержит систему акустической телеметрии, электрическое передающее устройство, радиопередающее устройство или их сочетание.
27. Система по п.18, дополнительно содержащая транспортное средство с дистанционным управлением (ROV) для считывания и передачи количества текучей среды из расходомера.
| ОБНАРУЖИТЕЛЬ ОБЪЕКТОВ ВНУТРИ ТРУБОПРОВОДОВ | 2001 |
|
RU2181460C1 |
| JP 61038536 A, 24.02.1986 | |||
| US 5453944 A, 26.09.1995 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 1999 |
|
RU2157514C1 |
| УСТРОЙСТВО для ОБНАРУЖЕНИЯ РАЗДЕЛИТЕЛЕЙили СКРЕБКОВ в | 0 |
|
SU174914A1 |
| СПОСОБ КОРРЕКЦИИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЧЕЛОВЕКА-ОПЕРАТОРА | 2018 |
|
RU2698363C2 |
| ГАЛЕЕВ В.Б., СОЩЕНКО Е.М., ЧЕРНЯЕВ Д.А | |||
| Ремонт магистральных трубопроводов и оборудования нефтеперекачивающих станций | |||
| - М.: Недра, 1968, с.160-161. | |||

