Изобретение относится к военной технике, в частности к способам охраны и обороны границы, ведения боя и борьбы с террористами. Разработана конструкция устройств охраны, стрелкового оружия для установки на сочлененной мобильной установке с целью дистанционного управления стрельбой и система дистанционной охраны и обороны объекта и защиты электронной аппаратуры системы управления от вибронагрузок при стрельбе.
Известен станок для отстрела оружия по пат. РФ №2082932, МПК6 F41A 31/00, опубл. 27.06.97 г. Станок содержит массивное основание, приспособление для фиксации и задний упор. Приспособление не предназначено для боевых действий и не содержит системы дистанционного управления.
Известна установка для крепления оружия на транспортном средстве по пат. РФ №2026527, МПК6 F41A 23/34, прототип, которая содержит ствол, привода горизонтального и вертикального перемещения и ограничители углов поворота ствола в горизонтальной и вертикальной плоскостях. Стрельба ведется с транспортного средства, прицеливание осуществляет стрелок путем горизонтального и вертикального поворота ствола вручную. Перемещение транспортного средства и его разворот обеспечивают дополнительное расширение сектора обстрела.
Недостатки устройства заключаются в том, что оно не предназначено для дистанционного управления стрельбой, а стрелок во время боевых действий подвергается значительной опасности. Система дистанционного контроля (охраны) вообще не предусмотрена.
Известны способ и устройство для радиоволнового обнаружения нарушителя по патенту РФ на изобретение №2145441. Этот способ тревожной сигнализации предназначен для усиления охраны границ дополнительно с другими известными мероприятиями. Для реализации этой цели в изобретении поставлены следующие технические задачи: ввести в состав чувствительного элемента признаки, обеспечивающие возможность синхронизации и энергопитания разнесенных в пространстве передатчика и приемника устройства, ввести признаки, уточняющие процедуру регулирования фазы пространственной волны.
Технический результат достигается тем, что в способе и устройстве с разнесенными в пространстве передатчиком и приемником ВЧ колебаний линии поверхностных радиоволн выполняют несколько функций: чувствительного элемента извещателя охраны, линии НЧ, временной синхронизации и линии энергопитания передатчика.
Известна система охраны и обороны по патенту РФ на изобретение №2270973, прототип, которая содержит, по меньшей мере, одну единицу дистанционно управляемого стрелкового оружия с приводами горизонтального и вертикального перемещения и управляющий компьютер, к которому эта система подключена.
Недостаток - система не адаптирована для охраны и обороны границы, а именно:
- не позволяет надежно выявить нарушителя, т.к. применение небольшого числа видеокамер не гарантирует обнаружение нарушителя,
- не позволяет предупредить нарушителя,
- не позволяет отразить атаку с применением тяжелой артиллерии и бронетехники.
Задача создания полезной модели - обеспечение дистанционного ведения охраны и обороны, в том числе и ведение боя с нарушителями границы с использованием дистанционно управляемого оружия.
Решение указанной задачи достигнуто за счет того, что в броненосном крейсере, содержащем буксир, имеющий привод, стрелковое оружие, систему управления движением и стрельбой, крейсер выполнен сочлененным из буксира, оборудованного в качестве привода двумя реактивными двигателями, установленными в мотогондолах и прикрепленными к боковым стенкам корпуса буксира, и буксируемого бронированного боевого модуля, также имеющего собственный привод с гребным винтом, соединенные между собой сцепкой и гибким кабелем, система управления движением и стрельбой выполнена из двух частей: бортовой, размещенной в буксире и в буксируемом бронированном боевом модуле, и стационарной, размещенной вне них, при этом в буксире смонтирована бортовая система управления движением и стрельбой, в боевом вагоне установлена, по меньшей мере, одна единица дистанционно управляемого стрелкового оружия и привода управления стрельбой. Бортовая система управления движением и стрельбой содержит установленные на буксире бортовой компьютер, соединенный с бортовым приемо-передающим устройством с бортовой антенной, привода управления стрельбой и контроллер приводов, соединенный с компьютером, по меньшей мере, одну видеокамеру, и, по меньшей мере, один тепловизор, и, по меньшей мере, один микрофон, подключенные к бортовому компьютеру. Система управления движением и стрельбой содержит, по меньшей мере, один датчик регистрации ударных нагрузок, установленный на корпусе буксира, подключенный через контроллер безопасности к бортовому компьютеру. Система управления движением и стрельбой содержит, по меньшей мере, один акселерометр, подключенный через контроллер управления к бортовому компьютеру. Стационарная система управления движением и стрельбой содержит управляющее приемо-передающее устройство с управляющим компьютером, имеющим монитор и устройство управления, например «джойстик».
Сущность изобретения поясняется на фиг.1…10, где:
на фиг.1 приведена принципиальная упрощенная схема броненосного крейсера,
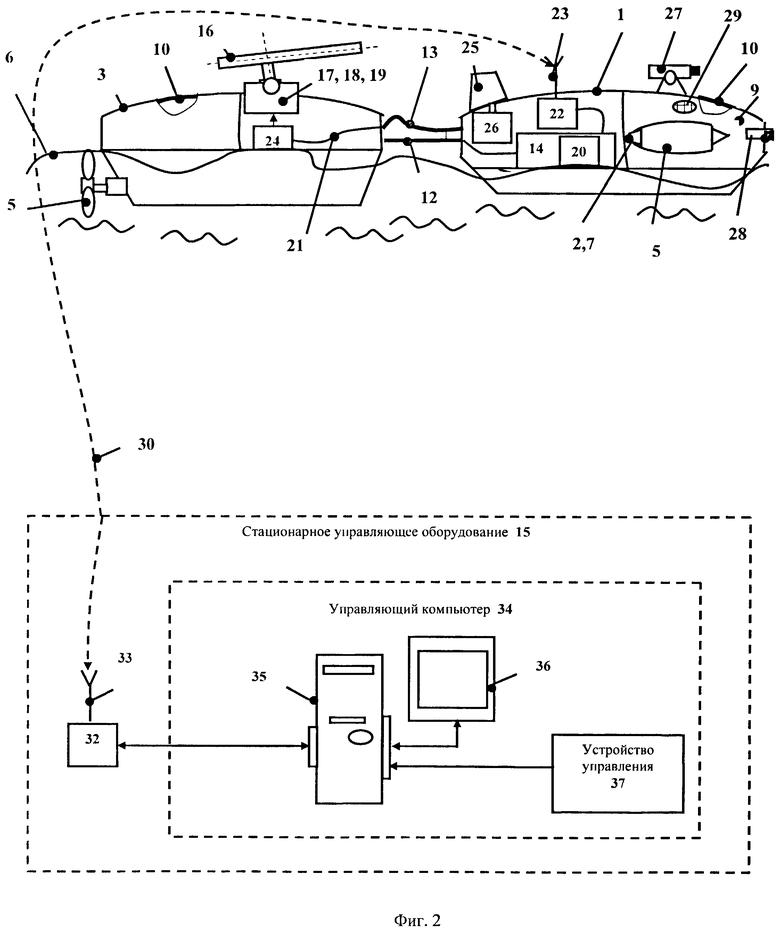
на фиг.2 приведена схема броненосного крейсера и системы управления движением и стрельбой,
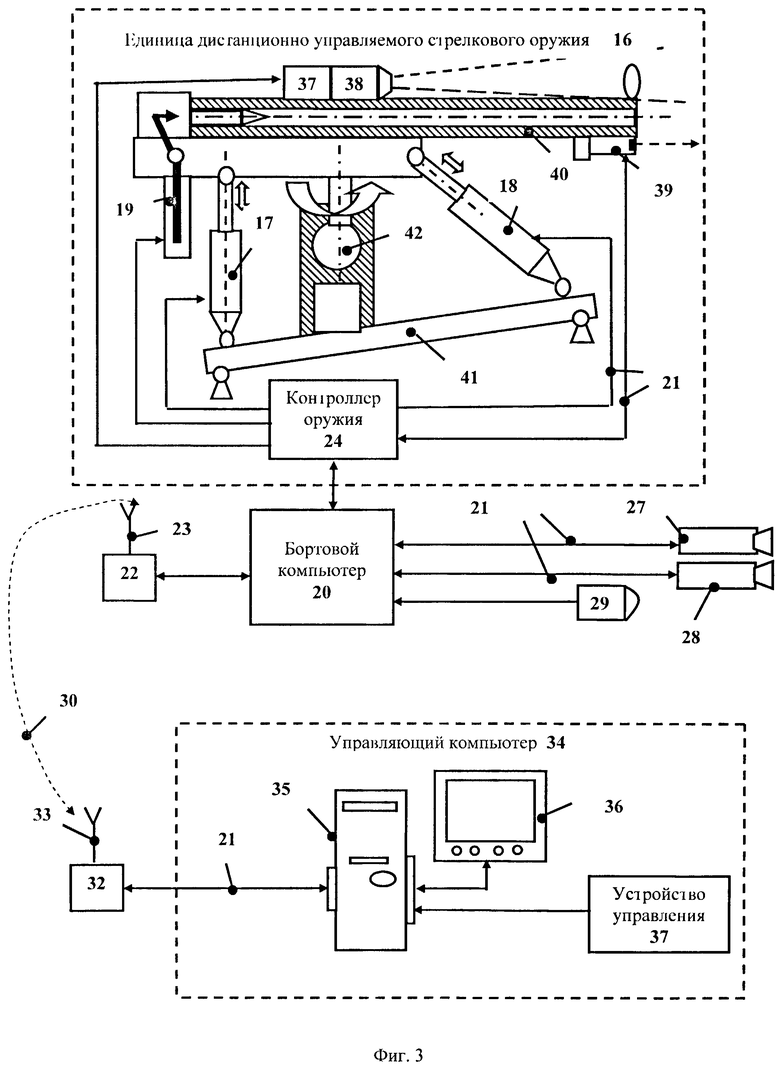
на фиг.3 приведена блок-схема систем броненосного крейсера,
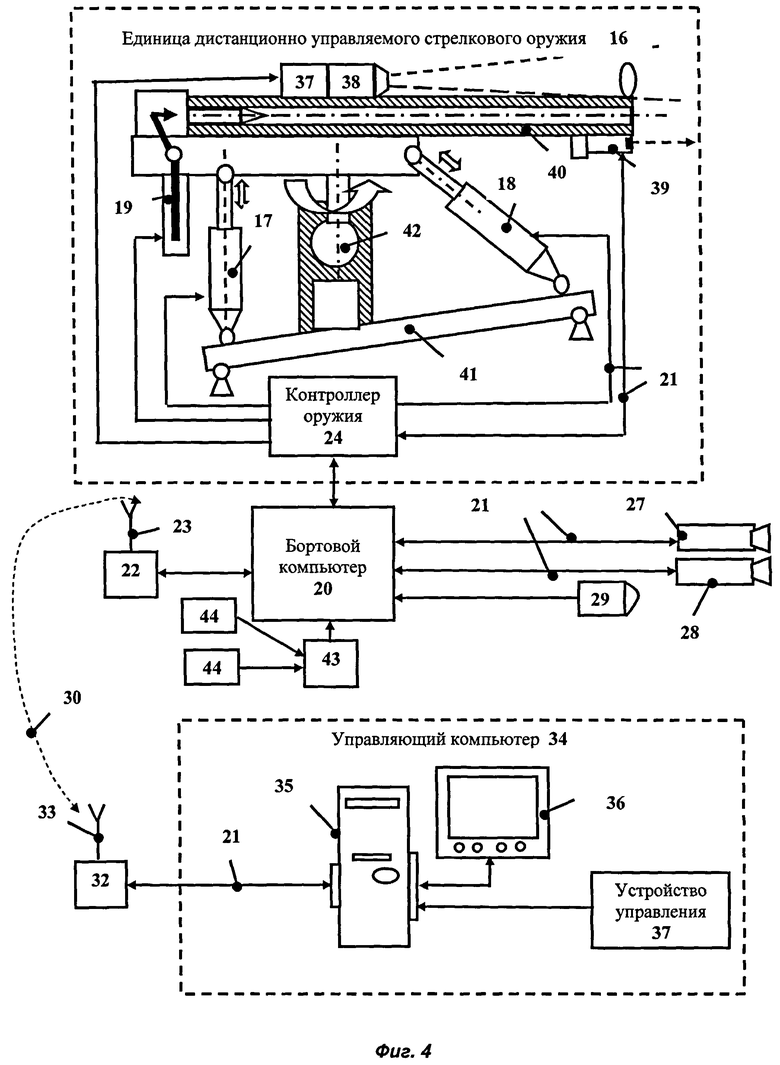
на фиг.4 показана блок-схема системы управления с датчиками ударных нагрузок,
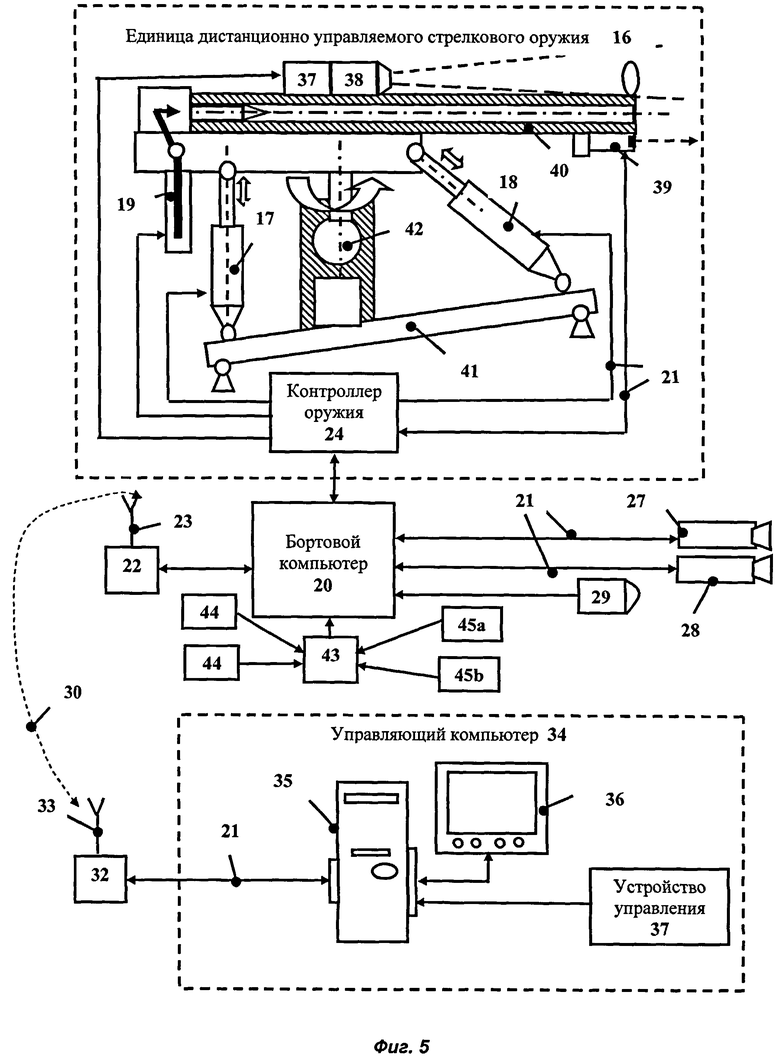
на фиг.5 приведена блок схема системы с акселерометрами,
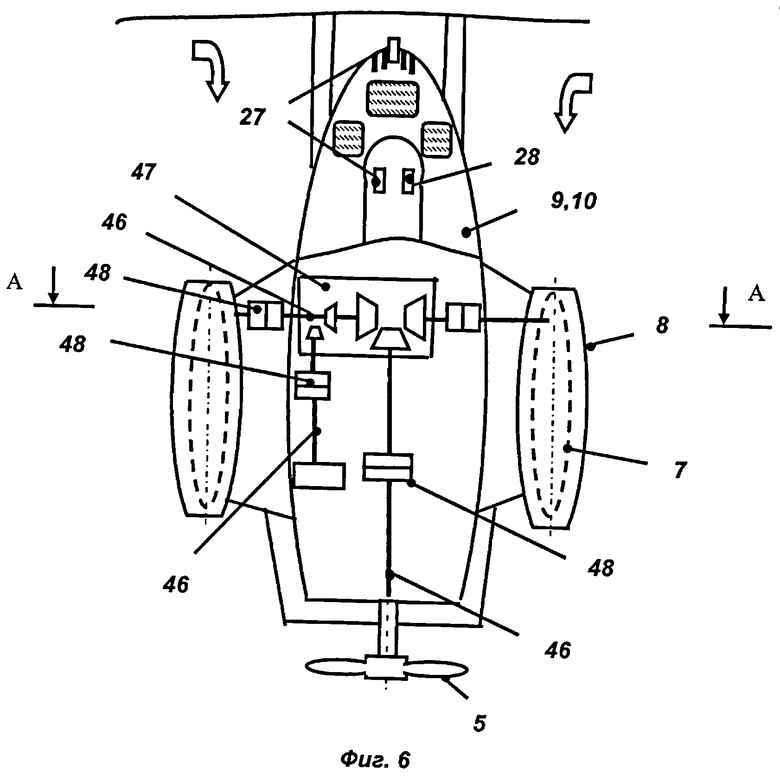
на фиг.6 показан буксир,
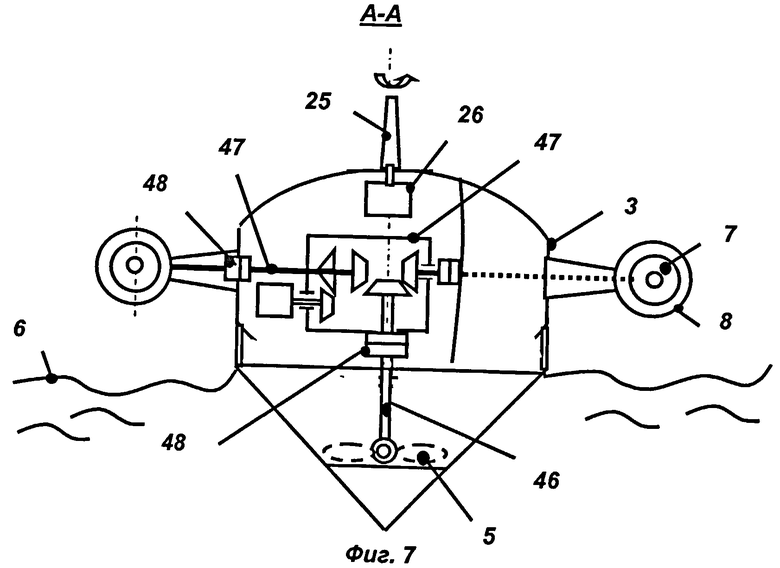
на фиг.7 приведен разрез по А-А фиг.4,
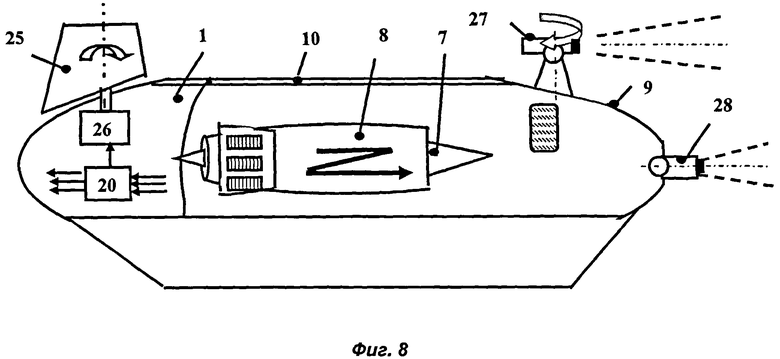
на фиг.8 показан внешний вид буксира,
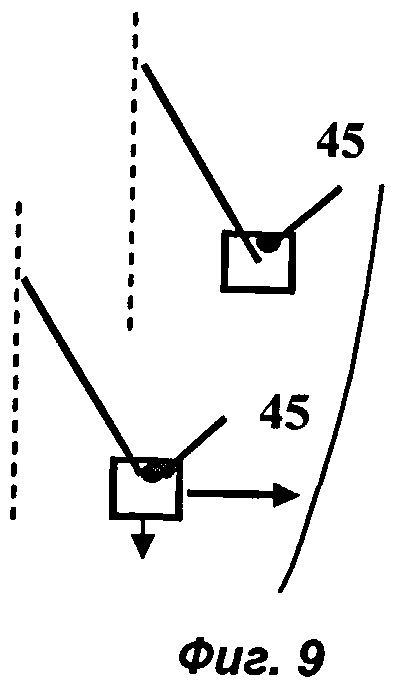
на фиг.9 приведена схема установки акселерометров,
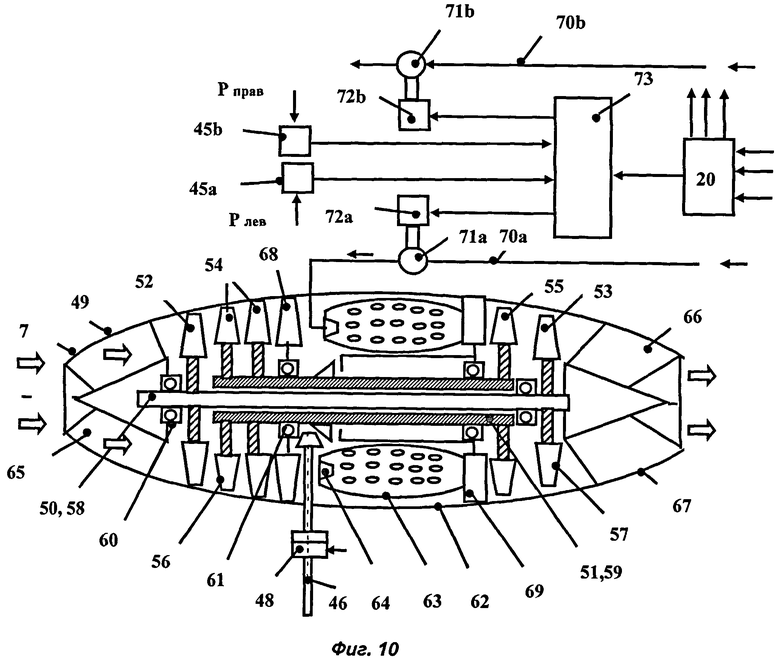
на фиг.10 приведен привод локомотива-газотурбинный двигатель.
Броненосный крейсер содержит (фиг.1) буксир 1, имеющий тяговый привод 2, стрелковое оружие 3, систему управления движением и стрельбой 4. Броненосный крейсер выполнен сочлененным и состоящим из буксира 1, имеющего вспомогательный привод с гребным винтом 5, контактирующим с морской водой, при этом буксир 1 оборудован в качестве основного привода 2 двумя реактивными двигателями 7, установленными в мотогондолах 8 и прикрепленными к боковым стенкам 9 корпуса 10 буксира 1, и бронированного боевого модуля 11, соединенных между собой сцепкой 12 и гибким кабелем 13. Бронированный боевой модуль 11 также имеет вспомогательный привод с гребным винтом 5.
Система управления движением и стрельбой 4 выполнена из двух частей: бортовой системы управления движением и стрельбой 14, размещенной на буксире 1 и в бронированном боевом модуле 11, и стационарной системы управления движением и стрельбой 15, размещенной вне них, при этом на буксире 1 смонтирована бортовая система управления движением и стрельбой 14, в бронированном боевом модуле 11 установлена, по меньшей мере, одна единица дистанционно управляемого стрелкового оружия 16 и привода управления стрельбой, а именно привод вертикального перемещения 17, привод горизонтального перемещения 18 и привод спускового механизма 19. Бортовая система управления движением и стрельбой 14 может содержать установленные в локомотиве 1 бортовой компьютер 20, соединенный электрическими связями 21 с бортовым приемо-передающим устройством 22, которое в свою очередь соединено с бортовой антенной 23.
Привода управления стрельбой 17…19 и контроллер оружия 24 соединены с бортовым компьютером 20 электрическими связями 22 и гибким кабелем 13.
На палубе буксира 1 установлен вертикальный аэродинимический руль 25, имеющий привод руля 26. Привод руля 26 соединен электрическими связями 21 с компьютером 20.
Кроме того, буксир 1 оборудован, по меньшей мере, одной видеокамерой 27, и, по меньшей мере, одним тепловизором 28, и, по меньшей мере, одним микрофоном 29. Стационарное управляющее оборудование соединено с бортовым оборудованием для управления движением и стрельбой 14 через антенну 23 и приемо-передающее устройство 22 посредством радиоканала 30.
Система управления движением и стрельбой 4 может содержать приемник системы глобального позиционирования 31, например GPS или Глонасс.
Стационарная система управления движением и стрельбой 15 содержит управляющее приемо-передающее устройство 32 с антенной 33, подключенной к нему, и с управляющим компьютером 34, имеющим монитор 35, и устройство управления 36, например «джойстик».
Каждая единица дистанционно управляемого стрелкового оружия 16 (фиг.3) содержит привод вертикального перемещение 17, привод горизонтального перемещения 18, привод спускового механизма 19, оптический прицел 37, видеокамеру наведения 38, лазерный целеуказатель 39, установленные или соединенные со стволом 40, который установлен на платформе 41 при помощи шарнира 42. Контроллер оружия 24 соединен электрическими связями 21 с приводами 17, 18, 19. Компьютер 20 соединен электрическими связями 21 с оптическим прицелом 37, видеокамерой наведения 38 и лазерным целеуказателем 39.
На фиг.4 приведена система, содержащая дополнительно подключенные к бортовому компьютеру 20 через контроллер 43 один или несколько датчиков ударных нагрузок 44, закрепленных на корпусе 10 буксира 1 и/или бронированного боевого модуля 11.
На фиг.5 приведен вариант исполнения системы управления движением и стрельбой, в которой к бортовому компьютеру 20 через контроллер 43 подключен, по меньшей мере, один акселерометр 45, установленный на буксире 1 и/или на бронированном боевом модуле 11.
Конструкция буксира 1 показана на фиг.6…8. Буксир 1 (фиг.6…8) содержит корпус 10, имеющий боковые стенки 9.
Газотурбинные двигатели 7 (фиг.6 и 7) при помощи силовых валов 46 соединены с редуктором 47 и далее с гребными винтами 5. Силовые валы 46 также имеют управляемые муфты 48.
Газотурбинные двигатели 7 (фиг.10) содержат входное устройство 49 и два турбокомпрессора: первый - 50 и второй - 51, выполненные по биротативной схеме, т.е. без сопловых и направляющих аппаратов, с возможностью вращения в противоположные стороны. Первый турбокомпрессор 50 содержит компрессор низкого давления 52 и турбину низкого давления 53. Второй турбокомпрессор 51 содержит компрессор высокого давления 54 и турбину высокого давления 55. Компрессор низкого давления 52 содержит, по меньшей мере, одно рабочее колесо 56. Турбина низкого давления 53 содержит также, по меньшей мере, одно рабочее колесо 57. Рабочие колеса 56 и 57 первого турбокомпрессора 50 соединены внутренним валом 58. Аналогично, компрессор высокого давления 54 содержит, по меньшей мере, одно рабочее колесо 56, а турбина высокого давления 55 содержит, по меньшей мере, одно рабочее колесо 57. Рабочие колеса 56 компрессора высокого давления 54 и рабочее колесо (колеса) 57 турбины высокого давления 55 соединены внешним валом 59. Внутренний вал 58 установлен на подшипниках 60, а внешний вал 59 установлен на подшипниках 61. Газотурбинный двигатель 7 имеет внешний корпус 62, к которому крепится камера сгорания 63 с форсунками 64, к внешнему корпусу 62 также крепятся при помощи ребер 65 входное устройство 49 и при помощи ребер 66 реактивное сопло 67. Перед камерой сгорания 63 установлен спрямляющий направляющий аппарат 68, а за камерой сгорания 63 - сопловой аппарат 69.
Топливная система каждого газотурбинного двигателя 7 содержит топливопроводы 70а и 70b, в которых установлен топливные насосы 71а и 71b, соединенные с приводами 72а и 72b. Буксир 1 оборудован блоком управления 73, соединенным с бортовым компьютером 20.
К блоку управления 73 также подключены приводы 72а и 72b топливных насосов 71 а и 71b (левого и правого газотурбинного двигателя 7).
При работе сначала по очереди запускают газотурбинные двигатели 7, раскручивают стартером (не показан) один из турбокомпрессоров 50 или 51 одного газотурбинного двигателя 7, запускают привод 72а, который раскручивает топливный насос 71а, топливо по топливопроводу 70а подается в форсунки 64 камеры сгорания 63, где воспламеняется при помощи пирозапальника или электрозапальника (не показан). Продукты сгорания проходят через турбину высокого давления 55 и турбину низкого давления 53. Мощность с турбин 55 и 53 передается на компрессоры 55 и 52, которые сжимают воздух, идущий в камеру сгорания 63. Значительная часть мощности (70…80%) подается на гребные винты 5, которые создают тягу буксира 1. Кроме того, два тяговых привода 2, выполненные в виде газотурбинных двигателей 7, создают дополнительно реактивную тягу 20…30% от общего тягового усилия.
При отказе одного газотурбинного двигателя 7 он отключается при помощи управляемой муфты 48, и буксир 1 продолжает движение, не снижая скорости за счет форсирования второго газотурбинного двигателя 7. Возникшее при этом боковое усилие компенсируется при помощи вертикального аэродинамического руля 25, которым управляет привод руля 26. Одновременно режим работы газотурбинных двигателей 7 регулируется топливными насосами 71а и 71b.
Управление осуществляет компьютер 20 по показаниям акселерометров 45, измеряющих крен в продольном и поперечном направлениях. В зависимости от показаний акселерометров 45 один из газотурбинных двигателей 7 переводится на повышенный режим работы или отключается, одновременно привод 26 поворачивает вертикальный аэродинамический руль 25 до ликвидации крена буксира 1.
Останов газотурбинных двигателей 7 осуществляется прекращением подачи топлива. Реверсирование осуществляют при помощи редуктора или применением реверса на газотурбинных двигателях 7 (детально это устройство в материалах заявки не приведено). Аварийный останов осуществляется реверсированием газотурбинных двигателей 7, маневрирование использованием вспомогательного дизельного двигателя при его наличии (не показан).
При ведении боя
При работе системы при помощи видеокамеры 27 или тепловизора 28 (в темное время суток) цель обнаруживает оператор, который находится вне броненосного крейсера на значительном расстоянии от него, возможно на другом континенте, и при помощи стационарной системы управления движением и стрельбой 15 наводит дистанционно управляемое оружие 16 на цель и приводит в действие привода 17, 18 и 19 для наведения оружия и стрельбы по цели.
Применение изобретения позволило:
1. Вести боевые действия дистанционно, находясь на значительном расстоянии в безопасном месте.
2. Уменьшить или практически полностью исключить потери операторов, улучшить комфортные условия их дежурства и увеличить эффективность стрельбы по противнику.
3. Улучшить и полностью автоматизировать управление крейсером за счет применения блоков управления, датчиков, управляемых муфт и вертикального аэродинамического руля.
4. Повысить боевые способности броненосного крейсера, усилив бронирование и вооружение при уменьшение габаритов за счет отказа от экипажа и раздельного размещения вооружения, создающего большие ударные нагрузки при стрельбе, и системы управления движением и стрельбой, а также основного силового привода.
5. Повысить надежность буксира за счет связи при помощи трансмиссии двух двигательных установок: основной силовой и вспомогательной установки с гребным винтом и возможностью продолжения полета при отказе одного из них.
6. Обеспечить возврат на базу буксира или боевого бронированного модуля при уничтожении противником одного из них.
7. Обеспечить маневрирование буксира за счет применением вспомогательного дизельного двигателя.
8. Повысить КПД всех двигательных силовых установок за счет более рациональной компоновки всех силовых установок, наличия двух каскадов компрессора и турбины у всех силовых установок и регенерации тепла на входе в основную силовую установку. Особенно значительно улучшены тяговые и весовые характеристики и уменьшен осевой габарит основной силовой установки локомотива за счет применения биротативной схемы.
9. Облегчить запуск за счет раскрутки только одного ротора основной силовой установки без раскручивания другого ротора.
10. Облегчить условия работы роторов основных силовых установок за счет возможности их взаимного проскальзывания одного из двух роторов и их работы на различающихся частотах вращения.
11. Уменьшить вес и габариты основной силовой установки, особенно осевой габарит, что важно для буксира, предназначенного для буксировки бронированного боевого модуля за счет применения биротативной схемы в газотурбинных двигателях.
12. Обеспечить противоположное вращение ступеней роторов основной силовой установки без применения редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| БРОНЕПОЕЗД | 2009 |
|
RU2405121C1 |
| БОЕВОЙ КОМПЛЕКС БЫСТРОГО РЕАГИРОВАНИЯ | 2007 |
|
RU2343395C1 |
| БОЕВОЙ КОМПЛЕКС | 2007 |
|
RU2340859C1 |
| БОЕВОЙ УДАРНЫЙ КОМПЛЕКС | 2007 |
|
RU2345314C1 |
| ШТУРМОВОЙ КОМПЛЕКС | 2007 |
|
RU2338995C1 |
| БОЕВОЙ КОМПЛЕКС | 2007 |
|
RU2341759C1 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2350893C2 |
| БОЕВАЯ СИСТЕМА | 2007 |
|
RU2345313C1 |
| АВТОНОМНЫЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2352893C2 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2342628C1 |
Изобретение относится к военной технике и предназначено для ведения боя. Броненосный крейсер содержит буксир, имеющий привод, стрелковое оружие, систему управления движением и стрельбой. Крейсер выполнен сочлененным из буксира, оборудованного в качестве привода двумя реактивными двигателями, установленными в мотогондолах и прикрепленными к боковым стенкам корпуса буксира, и буксируемого бронированного боевого модуля, также имеющего собственный привод с гребным винтом, соединенные между собой сцепкой и гибким кабелем. Система управления движением и стрельбой выполнена из двух частей: бортовой, размещенной в буксире и в буксируемом бронированном боевом модуле, и стационарной, размещенной вне них. В буксире смонтирована бортовая система управления движением и стрельбой, в боевом модуле установлена, по меньшей мере, одна единица дистанционно управляемого стрелкового оружия и привода управления стрельбой. Достигается повышение надежности и неуязвимости дистанционно управляемого оружия. 4 з.п. ф-лы, 10 ил.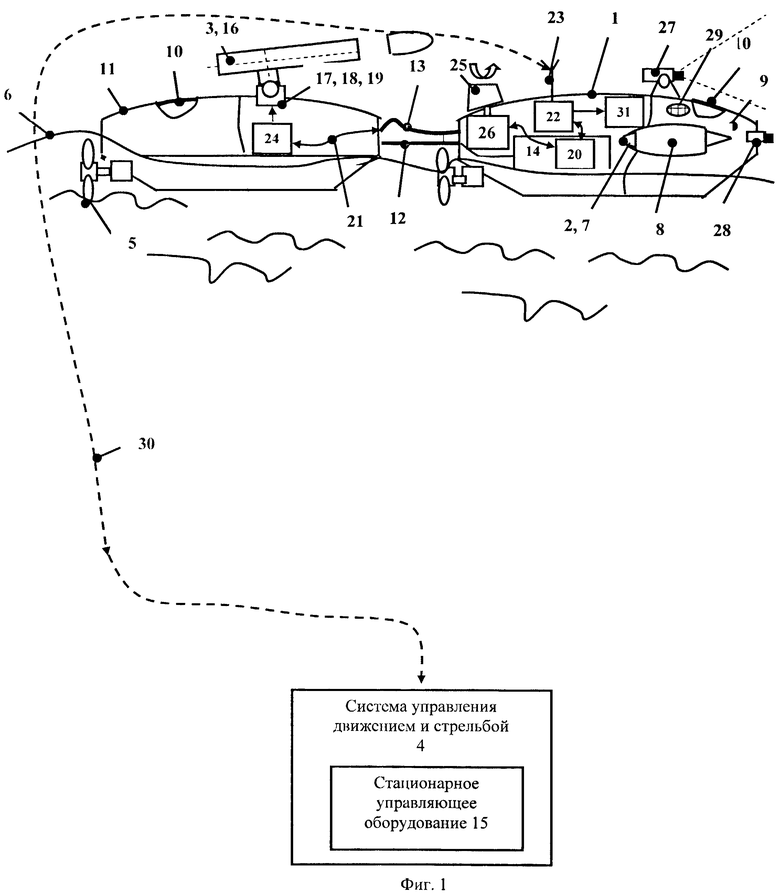
1. Броненосный крейсер, содержащий буксир, имеющий привод, стрелковое оружие, систему управления движением и стрельбой, отличающийся тем, что крейсер выполнен сочлененным из буксира, оборудованного в качестве привода двумя реактивными двигателями, установленными в мотогондолах и прикрепленными к боковым стенкам корпуса буксира, и буксируемого бронированного боевого модуля, также имеющего собственный привод с гребным винтом, соединенных между собой сцепкой и гибким кабелем, система управления движением и стрельбой выполнена из двух частей: бортовой, размещенной в буксире и в буксируемом бронированном боевом модуле, и стационарной, размещенной вне них, при этом в буксире смонтирована бортовая система управления движением и стрельбой, в боевом модуле установлена, по меньшей мере, одна единица дистанционно-управляемого стрелкового оружия, и привода управления стрельбой.
2. Броненосный крейсер по п.1, отличающийся тем, что бортовая система управления движением и стрельбой содержит установленные на буксире бортовой компьютер, соединенный с бортовым приемно-передающим устройством с бортовой антенной, приводы управления стрельбой и контроллер приводов, соединенный с компьютером, по меньшей мере, одну видеокамеру, по меньшей мере, один тепловизор и, по меньшей мере, один микрофон, подключенные к бортовому компьютеру.
3. Броненосный крейсер по п.2, отличающийся тем, что система управления движением и стрельбой содержит, по меньшей мере, один датчик регистрации ударных нагрузок, установленный на корпусе буксира, подключенный через контроллер безопасности к бортовому компьютеру.
4. Броненосный крейсер по п.2 или 3, отличающийся тем, что система управления движением и стрельбой содержит, по меньшей мере, один акселерометр, подключенный через контроллер управления к бортовому компьютеру.
5. Броненосный крейсер по п.1, отличающийся тем, что стационарная система управления движением и стрельбой содержит управляющее приемно-передающее устройство с управляющим компьютером, имеющим монитор, и устройство управления, например «джойстик».
| СПОСОБ СНИЖЕНИЯ КРОВОПОТЕРИ ПРИ ЛЕЧЕНИИ НЕРАЗВИВАЮЩЕЙСЯ БЕРЕМЕННОСТИ | 2011 |
|
RU2475239C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ОХРАНОЙ И ОБОРОНОЙ | 2004 |
|
RU2270973C2 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |

