Область техники
Настоящее изобретение относится к силовым преобразователям и, в частности, к силовым преобразователям, которые могут быть использованы в качестве интерфейса между электрическими генераторами, вырабатывающими регулируемое напряжение с регулируемой частотой, и электрической сетью, которая должна обеспечивать номинальное фиксированное напряжение с номинальной фиксированной частотой. Настоящее изобретение также предусматривает, что силовые преобразователи остаются подключенными к сети питания и осуществляют управление при нарушении работы сети и в условиях переходных процессов. Силовые преобразователи особенно пригодны для использования с генераторами, которые вращаются ветряными двигателями, хотя применение преобразователей не ограничивается только ветровыми электростанциями.
Предпосылки создания изобретения
Энергия ветра может быть преобразована в электрическую энергию с помощью ветряной турбины, вращающей ротор генератора и соединенной с ним непосредственно или через редуктор. Частота переменного тока, который вырабатывается на клеммах статора генератора (далее "напряжение статора"), прямо пропорциональна скорости вращения ротора. Напряжение на клеммах генератора также изменяется при изменениях скорости и, кроме того, при изменении интенсивности магнитного потока (в зависимости от типа генератора). Для оптимального улавливания энергии ветра скорость вращения выходного вала ветровой турбины должна изменяться в соответствии со скоростью ветра, вращающего лопасти турбины. Для ограничения уровня энергии, получаемой при высоких скоростях ветра, скоростью вращения выходного вала управляют путем изменения угла наклона лопастей турбины. Регулирование напряжения и частоты электрического тока, вырабатываемого генератором, таким образом, чтобы оно соответствовало номинальному фиксированному напряжению с номинальной фиксированной частотой сети питания, осуществляется с помощью силового преобразователя.
В патенте США №5083039 описывается ветряная турбина с регулируемой скоростью вращения, в которой вращающийся вал турбины используется для привода асинхронного генератора переменного тока. Для сопряжения выхода генератора с электрической сетью используется силовой преобразователь. Такой силовой преобразователь содержит активные силовые полупроводниковые вентили, которые управляют электрическими параметрами статора в каждой фазе генератора. Для выработки командного сигнала, определяющего необходимую величину вращающего момента, используется устройство задания вращающего момента. Работа контроллера генератора определяется ориентацией поля и управляется указанным командным сигналом для задания необходимой составляющей тока по поперечной оси генератора, который связан с вращающим моментом в системе координат вращающегося поля, нормальной к полю магнитного потока ротора. Контроллер генератора управляет активными силовыми полупроводниковыми вентилями с использованием схемы широтно-импульсной модуляции для установления электрических параметров статора, которые соответствуют необходимой составляющей тока по поперечной оси. Контроллер инвертора регулирует выходной ток для обеспечения многофазной сети питания переменного тока, в которой угол опережения или запаздывания по фазе для тока задается сигналом управления коэффициентом электрической мощности. При таком устройстве провалы напряжения в сети приводят к потере управления напряжением на звене ПТ (ПТ). Соответственно, также теряется управление реактивным током, которое существенно для функций поддержки напряжения, которые должны поддерживаться в соответствии с сетевыми кодами.
В патенте США №5225712 вышеуказанный принцип расширяется и охватывает управление реактивной мощностью или управление коэффициентом электрической мощности как функцию переключателя режимов. Аналогично, схема контроллера моста инвертора по патенту США №5225712 используется исключительно для регулирования напряжения на звене ПТ. Поэтому обеим схемам присущ недостаток, заключающийся в том, что при пропаданиях напряжения в сети питания теряется управление напряжением звена ПТ, а также теряется возможность управления реактивным током при провалах напряжения.
Сущность изобретения
Целью настоящего изобретения является по меньшей мере снижение остроты вышеуказанных проблем и недостатков путем создания силового преобразователя, который может использоваться для сопряжения генератора, вырабатывающего регулируемое напряжение с регулируемой частотой, с сетью питания, которая должна обеспечивать номинальное фиксированное напряжения с номинальной фиксированной частотой, причем силовой преобразователь содержит:
первый активный выпрямитель/инвертор, электрически соединенный со статором генератора и содержащий силовые полупроводниковые вентили;
второй активный выпрямитель/инвертор, содержащий силовые полупроводниковые вентили;
звено ПТ, включенное между первым активным выпрямителем/инвертором и вторым активным выпрямителем/инвертором;
фильтр, включенный между вторым активным выпрямителем/инвертором и сетью питания, причем фильтр содержит сетевые клеммы;
первый контроллер для первого активного выпрямителя/инвертора; и
второй контроллер для второго активного выпрямителя/инвертора;
причем в первом контроллере используется командный сигнал регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, для управления силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора с целью достижения необходимого уровня напряжения на звене ПТ, которое соответствует командному сигналу регулирования напряжения на звене ПТ; и
во втором контроллере используется командный сигнал регулирования мощности, определяемый уровнем мощности, которая должна передаваться из звена ПТ в сеть питания через второй активный выпрямитель/инвертор, и командный сигнал регулирования напряжения, определяемый напряжением, которое должно быть получено на сетевых клеммах фильтра для управления силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора с целью достижения необходимых уровней мощности и напряжения, которые соответствуют командным сигналам регулирования мощности и напряжением.
Силовой преобразователь может использоваться для сопряжения генератора с сетью питания в нормальном режиме работы, однако он имеет также особенности, которые позволяют обеспечивать работу при изменениях напряжения в сети питания из-за неисправностей сети или в связи с переходными процессами. Более конкретно во втором контроллере может использоваться измерение напряжения в сети питания для определения предельных значений мощности, которая может передаваться из второго выпрямителя/инвертора, когда характеристики напряжения в сети питания отклоняются от их номинальных значений, и также измерение напряжения в сети питания может использоваться для определения уровня тока, который должен быть обеспечен из второго активного выпрямителя/инвертора для поддержки напряжения в сети питания, когда его характеристики отклоняются от номинальных значений.
В качестве генератора может использоваться линейный или генератор любого подходящего типа. В качестве примеров можно указать асинхронный генератор или синхронный генератор с возбуждением, обеспечиваемым любыми подходящими средствами, такими как, например, постоянные магниты или обмотки возбуждения, обычные или сверхпроводящие. В случае вращающегося генератора его ротор может быть соединен с выходным валом турбины или первичного источника энергии, такого как, например, ветряная турбина, приливно-отливная турбина, гидравлическая турбина, паровая машина, дизельный двигатель или газотурбинный двигатель. Линейный генератор может использоваться в приложениях, в которых принципиально используется энергия возвратно-поступательного движения, например волновые генераторы энергии.
В первом контроллере предпочтительно используется командный сигнал управления магнитным потоком, определяемый необходимой величиной магнитного потока, который должен быть получен в генераторе, и этот сигнал преобразуется в командный сигнал регулирования тока по продольной оси для первого активного выпрямителя/инвертора. После этого первый контроллер может использовать полученный командный сигнал регулирования тока по продольной оси для управления работой силовых полупроводниковых вентилей первого выпрямителя/инвертора с целью получения электрических параметров статора, в результате чего может быть получен необходимый ток по продольной оси для первого активного выпрямителя/инвертора. Термин "электрические параметры статора" в настоящем описании относится к следующим параметрам: величина каждого фазного напряжения, величина каждого фазного тока, фаза и частота в многофазном генераторе.
Работой силовых полупроводниковых вентилей в первом активном выпрямителе/инверторе можно управлять, используя импульсные управляющие сигналы в соответствии с обычной техникой широтно-импульсной модуляции. Ясно, что могут быть рассмотрены различные типы широтно-импульсной модуляции. В предпочтительном варианте осуществления настоящего изобретения с инвертором двухуровневого источника напряжения может быть использована описанная ниже схема широтно-импульсной модуляции с фиксированной частотой импульсов. Заданное выходное напряжение, определяемое комбинацией сигналов напряжения по продольной и поперечной осям, в цифровом процессоре умножается на величину синусоидального сигнала, оптимизированного по гармоникам, кратным третьей, определяемую величиной угла, под которым выходное напряжение должно подаваться для заданной фазы в активном выпрямителе/инверторе. Синусоидальный сигнал, оптимизированный по гармоникам, кратным третьей, используется для получения максимальной величины выходного напряжения, которая может быть получена на клеммах переменного тока активного выпрямителя/инвертора для заданного напряжения звена ПТ. Полученный сигнал сравнивается с треугольным сигналом фиксированной частоты для определения конкретных моментов коммутации верхнего и нижнего силовых полупроводниковых вентилей в этой фазе активного выпрямителя/инвертора. Для преодоления известных задержек переключения и предотвращения состояния одновременной проводимости верхнего и нижнего силовых полупроводниковых вентилей могут использоваться периоды гашения в интервалах коммутации, когда верхний силовой полупроводниковый вентиль находится в выключенном состоянии, а нижний силовой полупроводниковый вентиль находится во включенном состоянии. Аналогично, соответствующие периоды гашения используются, когда нижний силовой полупроводниковый вентиль находится в выключенном состоянии, а верхний силовой полупроводниковый вентиль находится во включенном состоянии. Указанный процесс повторяется для каждой фазы активного выпрямителя/инвертора.
Первый контроллер предпочтительно преобразует командный сигнал регулирования магнитного потока в командный сигнал регулирования тока по продольной оси в соответствии с одной или несколькими характеристиками генератора. К таким характеристикам относятся параметры эквивалентной цепи генератора и/или данные, указанные на шильдике генератора, такие как номинальный ток, номинальное напряжение, скорость, мощность и частота, и другие данные, такие как кривая намагничивания. Кривая намагничивания определяет зависимость между магнитным потоком статора и током по продольной оси, необходимым для его получения. Как правило, кривая намагничивания для генератора представляет собой линейную зависимость между магнитным потоком статора и током по продольной оси вплоть до определенного значения потока. После этого значения для небольшого изменения магнитного потока требуется гораздо большее изменение тока по продольной оси. Эта нелинейная часть кривой намагничивания обусловливается насыщением железа, используемого для формирования магнитопровода генератора. Кривая намагничивания может быть получена после испытаний генератора при его изготовлении или с помощью испытаний путем инжекции тока, проводимых при вводе генератора в эксплуатацию. Такие испытания могут быть включены в процедуру автоматического запуска комплекса силовой преобразователь/генератор.
Первый контроллер предпочтительно сравнивает командный сигнал регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, с сигналом обратной связи по напряжению на звене ПТ для получения командного сигнала регулирования тока по поперечной оси для первого активного выпрямителя/инвертора. Затем первый контроллер может управлять работой силовых полупроводниковых вентилей первого активного выпрямителя/инвертора для получения электрических параметров статора, в результате чего достигается необходимый ток по поперечной оси для первого активного выпрямителя/инвертора.
Второй контроллер может выдавать в первый контроллер управляющий сигнал, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания. Таким образом, первый контроллер может сравнивать командный сигнал регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, с сигналом обратной связи по напряжению на звене ПТ для получения командного сигнала регулирования тока звена ПТ и затем ограничивает его с использованием управляющего сигнала, полученного из второго контроллера, для получения ограниченного командного сигнала регулирования тока звена ПТ. Ограниченный командный сигнал регулирования тока звена ПТ может затем использоваться первым контроллером для получения командного сигнала регулирования тока по поперечной оси для первого активного выпрямителя/инвертора.
В альтернативном варианте второй контроллер может выдавать в первый контроллер управляющий сигнал, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания, и/или командный сигнал регулирования мощности. Таким образом, регулятор напряжения на звене ПТ первого контроллера может сравнивать командный сигнал регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, с сигналом обратной связи по напряжению на звене ПТ для получения выходного сигнала, который складывается с управляющим сигналом для получения командного сигнала регулирования тока звена ПТ. Затем командный сигнал регулирования тока звена ПТ может затем использоваться для получения командного сигнала регулирования тока по поперечной оси для первого активного выпрямителя/инвертора.
Второй контроллер предпочтительно преобразует командный сигнал регулирования мощности, определяемый уровнем мощности, которая должна передаваться от звена ПТ в сеть питания через второй активный выпрямитель/инвертор, в командный сигнал регулирования тока по поперечной оси для второго активного выпрямителя/инвертора. Затем второй контроллер может управлять работой силовых полупроводниковых вентилей второго активного выпрямителя/инвертора для получения электрических параметров фильтра/сети питания, в результате чего достигается необходимый ток по поперечной оси для второго активного выпрямителя/инвертора. Термин "электрические параметры фильтра/сети питания" в настоящем описании относится к следующим параметрам: величина каждого фазного напряжения, величина каждого фазного тока, фаза и частота в многофазной системе активного выпрямителя/инвертора. Термин "многофазный" обычно относится к трехфазным системам, однако может быть и другое количество фаз. Работой силовых полупроводниковых вентилей во втором выпрямителе/инверторе можно управлять, используя импульсные управляющие сигналы в соответствии с обычной техникой широтно-импульсной модуляции.
Командный сигнал регулирования мощности может быть преобразован в командный сигнал регулирования тока по поперечной оси делением командного сигнала регулирования мощности на сигнал, который определяется напряжением на сетевых клеммах фильтра. Этот сигнал предпочтительно является компонентой по поперечной оси напряжения переменного тока, которое получают из измерения трехфазного напряжения на стороне сети фильтра. В альтернативном варианте командный сигнал регулирования мощности может быть преобразован в командный сигнал регулирования тока по поперечной оси делением командного сигнала регулирования мощности на сигнал, полученный фильтрацией сигнала, который определяется напряжением на сетевых клеммах фильтра.
Во втором контроллере предпочтительно используется дополнительный командный сигнал регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, который сравнивается с сигналом обратной связи по напряжению на звене ПТ для получения командного сигнала регулирования тока по поперечной оси без ограничения. Затем этот командный сигнал регулирования тока по поперечной оси без ограничения может быть ограничен для получения ограниченного командного сигнал регулирования тока по поперечной оси для второго выпрямителя/инвертора. Командный сигнал регулирования тока по поперечной оси без ограничения может быть ограничен до величины, которая определяется сигналом ограничения, предпочтительно получаемым из командного сигнала регулирования мощности.
Командный сигнал регулирования тока по поперечной оси без ограничения может быть прибавлен к сигналу положительной обратной связи по току по поперечной оси, который получают из следующих сигналов: сигнала, определяемого мощностью генератора, сигнала обратной связи по напряжению, измеренному на сетевых клеммах фильтра, и сигнала усиления, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания.
Сигнал, определяемый мощностью генератора, может быть подан во второй контроллер из первого контроллера. В альтернативном варианте во второй контроллер может быть подан сигнал, определяемый мощностью генератора, из которого вычитается выходной сигнал ПИ-регулятора регулятора напряжения звена ПТ первого контроллера, который используется во втором контроллере только при провалах напряжения в сети питания.
Во втором контроллере может пересчитываться сигнал ограничения, который определяется из командного сигнала регулирования мощности в соответствии с преобладающими характеристиками напряжения сети питания. Сигнал ограничения может быть пересчитан во втором контроллере в соответствии с отклонениями напряжения в сети питания от номинальных характеристик, например, при нарушении работы сети питания или в условиях переходных процессов. В результате изменяется передача энергии в сеть питания, для того чтобы обеспечить выполнение требований к сетям электропитания, таких как поддержка напряжения и/или частоты.
Звено ПТ может содержать конденсатор. В этом случае силовой преобразователь может содержать дополнительно датчик тока для измерения тока, протекающего через конденсатор, и выдачи выходного сигнала. Выходной сигнал датчика тока может быть вычтен из сигнала, полученного из сигнала, определяемого мощностью генератора, для получения предполагаемого сигнала, который добавляется к выходному сигналу регулятора напряжения на звене ПТ первого контроллера для получения командного сигнала регулирования тока звена ПТ для первого активного выпрямителя/инвертора. В альтернативном варианте выходной сигнал датчика тока может быть вычтен из сигнала, полученного из сигнала, определяемого мощностью генератора, для получения сигнала, который фильтруется и добавляется к выходному сигналу регулятора напряжения на звене ПТ первого контроллера для получения командного сигнала регулирования тока звена ПТ для первого активного выпрямителя/инвертора.
В альтернативном варианте силовой преобразователь может содержать дополнительно датчик напряжения для измерения напряжения на звене ПТ и обеспечения сигнала обратной связи по напряжению звена ПТ. Также могут использоваться средства для измерения скорости изменения сигнала обратной связи по напряжению на звене ПТ. Затем интегральная составляющая ПИ-регулятора регулятора напряжения на звене ПТ первого контроллера может быть пересчитана с помощью заданного коэффициента, когда сигнал обратной связи по напряжению на звене ПТ превышает первое пороговое значение, и скорость изменения сигнала обратной связи по напряжению на звене ПТ превышает второе пороговое значение.
При провале напряжения в сети питания командный сигнал регулирования тока по поперечной оси для второго активного выпрямителя/инвертора может быть получен из сигнала, ограниченного по скорости нарастания, полученного из номинального предела мощности второго активного выпрямителя/инвертора, который пересчитывается в зависимости от преобладающих характеристик напряжения в сети питания.
Во втором контроллере предпочтительно осуществляется сравнение командного сигнала регулирования напряжения, определяемого уровнем необходимого напряжения на сетевых клеммах фильтра, с сигналом обратной связи по напряжению, измеренному на сетевых клеммах фильтра, для получения командного сигнала регулирования тока по продольной оси для второго активного выпрямителя/инвертора. Затем второй контроллер может управлять работой силовых полупроводниковых вентилей второго активного выпрямителя/инвертора для получения электрических параметров фильтра/сети питания, в результате чего достигается необходимый ток по продольной оси для второго активного выпрямителя/инвертора.
Во втором контроллере командный сигнал регулирования тока по продольной оси может быть пересчитан в соответствии с преобладающими характеристиками напряжения в сети питания.
Во втором контроллере может быть пересчитан сигнал ошибки, определяемой разностью между командным сигналом регулирования напряжения, определяемым уровнем напряжения, который должен быть получен на сетевых клеммах фильтра, и сигналом обратной связи по напряжению, измеренному на сетевых клеммах фильтра, в соответствии с сигналом, полученным из командного сигнала регулирования тока по продольной оси. Пересчет сигнала ошибки в соответствии с сигналом, полученным из командного сигнала регулирования тока по продольной оси, осуществляется для того, чтобы можно было реализовать характеристику, которая может способствовать распределению тока между несколькими генераторами, подсоединяемыми по параллельной схеме к заданной сети питания.
Кроме того, силовой преобразователь предпочтительно содержит дополнительно датчик скорости для получения сигнала скорости, определяемого скоростью движущейся части генератора (то есть ротора в случае вращающегося генератора и части, совершающей возвратно-поступательное движение, для линейного генератора). Однако в некоторых случаях датчик скорости может быть заменен системой оценки скорости, в которой используются внутренние сигналы, подаваемые в первый активный выпрямитель/инвертор, для получения сигнала скорости. Затем сигнал скорости, получаемый из датчика скорости или из системы оценки скорости, может использоваться для получения командного сигнала регулирования мощности с использованием справочной таблицы, содержащей значения командного сигнала регулирования мощности для разных значений скорости. Такая таблица может использоваться вместе с ПИ-регулятором. Сигнал скорости предпочтительно пересчитывается с помощью фильтр-функции. Сигнал скорости также может быть пересчитан с использованием второй фильтр-функции и умножен на коэффициент усиления для получения демпфирующей составляющей, которая прибавляется к командному сигналу регулирования мощности, полученному из таблицы мощность-скорость, для получения полного командного сигнала регулирования мощности. Фильтр-функции могут использоваться независимо или совместно для демпфирования резонансных колебаний вала или приводного механизма, в зависимости от ситуации.
В настоящем изобретении также предлагается система, содержащая несколько вышеописанных силовых преобразователей, подключенных по параллельной схеме к сети питания, которая должна обеспечивать номинальное фиксированное напряжение с номинальной фиксированной частотой, в точке параллельного подключения. Командный сигнал регулирования напряжения, определяемый напряжением, которое должно быть получено на сетевых клеммах каждого силового преобразователя, предпочтительно получают путем сравнения командного сигнала верхнего уровня регулирования напряжения и сигнала верхнего уровня обратной связи по напряжению, которое измеряется в точке параллельного подключения преобразователей к сети питания.
Каждый отдельный силовой преобразователь содержит повышающий трансформатор, включенный электрически между соответствующим фильтром и точкой параллельного подключения. Система может также содержать повышающий трансформатор, включенный электрически между точкой параллельного подключения и сетью питания. Сигнал верхнего уровня обратной связи по напряжению измеряется либо на стороне сети питания, либо на стороне параллельного подключения повышающего трансформатора, включенного электрически между точкой параллельного подключения и сетью питания. Преимущество измерения сигнала обратной связи по напряжению на стороне сети повышающего трансформатора заключается в том, что при измерении на стороне параллельного подключения требуется регулирование на повышающем трансформаторе. Необходимость такого регулирования отсутствует, если измерение осуществляется на стороне сети питания.
Силовой преобразователь пригоден для использования в ветряной турбине. Поэтому в настоящем изобретении предлагается ветряная турбина, содержащая генератор со статором и ротором, блок турбины, содержащей по меньшей мере одну лопасть для вращения ротора генератора, и вышеописанный силовой преобразователь. Блок турбины может быть выполнен как одно целое с ротором генератора. В альтернативном варианте лопасть или лопасти турбины (обычно три лопасти) устанавливаются на вращающемся валу, и ротор генератора присоединяется к вращающемуся валу. Ротор генератора может быть присоединен к вращающемуся валу непосредственно или через редуктор.
Несколько ветряных турбин могут быть соединены вместе для формирования ветроэлектростанции. Поэтому в настоящем изобретении предлагается также ветроэлектростанция, содержащая сеть питания, которая должна обеспечивать номинальное фиксированное напряжение на номинальной фиксированной частоте, и несколько вышеописанных ветряных турбин. Соответствующие силовые преобразователи ветряных турбин подключены параллельно к сети питания в точке параллельного подключения, причем командный сигнал регулирования напряжения, определяемый напряжением, которое должно быть получено на сетевых клеммах фильтра каждого силового преобразователя, определяется сравнением командного сигнала верхнего уровня регулирования напряжения и сигнала верхнего уровня обратной связи по напряжению, которое измеряется в точке параллельного подключения преобразователей к сети питания.
Каждый отдельный силовой преобразователь содержит повышающий трансформатор, включенный электрически между фильтром соответствующего силового преобразователя и точкой параллельного подключения. Ветроэлектростанция может также содержать повышающий трансформатор, включенный электрически между точкой параллельного подключения и сетью питания. Сигнал верхнего уровня обратной связи по напряжению измеряется либо на стороне сети питания, либо на стороне параллельного подключения повышающего трансформатора, включенного электрически между точкой параллельного подключения и сетью питания.
Кроме того, в изобретении предлагается способ осуществления работы силового преобразователя, который может использоваться для сопряжения генератора, вырабатывающего регулируемое напряжение с регулируемой частотой, с сетью питания, которая должна обеспечивать номинальное фиксированное напряжение с номинальной фиксированной частотой, причем силовой преобразователь содержит:
первый активный выпрямитель/инвертор, электрически соединенный со статором генератора и содержащий силовые полупроводниковые вентили;
второй активный выпрямитель/инвертор, содержащий силовые полупроводниковые вентили;
звено ПТ, включенное между первым активным выпрямителем/инвертором и вторым активным выпрямителем/инвертором;
фильтр, включенный между вторым активным выпрямителем/инвертором и сетью питания, причем фильтр содержит сетевые клеммы;
первый контроллер для первого активного выпрямителя/инвертора; и
второй контроллер для второго активного выпрямителя/инвертора;
причем способ содержит следующие стадии:
использование в первом контроллере командного сигнала регулирования напряжения на звене ПТ, определяемого необходимым напряжением на звене ПТ, для управления силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора с целью достижения необходимого уровня напряжения на звене ПТ, которое соответствует командному сигналу регулирования напряжения на звене ПТ; и
использование во втором контроллере командного сигнала регулирования мощности, определяемого уровнем мощности, которая должна передаваться из звена ПТ в сеть питания через второй активный выпрямитель/инвертор, и командного сигнала регулирования напряжения, определяемого напряжением, которое должно быть получено на сетевых клеммах фильтра, для управления силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора с целью достижения необходимых уровней мощности и напряжения, которые соответствуют командным сигналам регулирования мощности и напряжения.
Способ может также содержать дополнительные стадии, указанные ниже.
Во втором контроллере может использоваться измерение напряжения в сети питания для определения пределов мощности, которая может экспортироваться из второго активного выпрямителя/инвертора, когда характеристики напряжения в сети питания отклоняются от их номинальных значений.
Во втором контроллере также может использоваться измерение напряжения в сети питания для определения уровня тока, который должен обеспечиваться вторым активным выпрямителем/инвертором, когда характеристики напряжения в сети питания отклоняются от их номинальных значений.
В первом контроллере может использоваться командный сигнал регулирования магнитного потока, задающий необходимый уровень магнитного потока, который должен быть получен в генераторе, осуществляться преобразование командного сигнала регулирования магнитного потока в командный сигнал регулирования тока по продольной оси для первого активного выпрямителя/инвертора и управление силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора для получения электрических параметров статора, которые позволяют получить необходимый ток по продольной оси для первого активного выпрямителя/инвертора. Стадия преобразования командного сигнала регулирования магнитного потока в командный сигнал регулирования тока по продольной оси выполняется в соответствии с одной или несколькими характеристиками генератора.
В первом контроллере может осуществляться сравнение командного сигнала регулирования напряжения на звене ПТ, определяемого необходимым напряжением на звене ПТ, с сигналом обратной связи по напряжению на звене ПТ для получения командного сигнала регулирования тока по поперечной оси для первого активного выпрямителя/инвертора и управление силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора для получения электрических параметров статора, которые позволяют получить необходимый ток по поперечной оси для первого активного выпрямителя/инвертора.
Второй контроллер может выдавать в первый контроллер управляющий сигнал, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания, при провалах напряжения в сети питания. В первом контроллере может осуществляться сравнение командного сигнала регулирования напряжения на звене ПТ, определяемого необходимым напряжением на звене ПТ, с сигналом обратной связи по напряжению на звене ПТ для получения командного сигнала регулирования тока звена ПТ и ограничивает его с использованием управляющего сигнала, полученного из второго контроллера, для получения ограниченного командного сигнала регулирования тока звена ПТ. После этого первый контроллер может использовать ограниченный командный сигнал регулирования тока звена ПТ для получения командного сигнала регулирования тока по поперечной оси для первого активного выпрямителя/инвертора, так чтобы из сети питания не отбиралась энергия при провалах напряжения в сети питания.
В альтернативном варианте второй контроллер может выдавать в первый контроллер управляющий сигнал, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания, и/или командный сигнал регулирования мощности. Таким образом, регулятор напряжения на звене ПТ первого контроллера может сравнивать командный сигнал регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, с сигналом обратной связи по напряжению на звене ПТ для получения выходного сигнала, который складывается с управляющим сигналом для получения командного сигнала регулирования тока звена ПТ. Командный сигнал регулирования тока звена ПТ может затем использоваться для получения командного сигнала регулирования тока по поперечной оси для первого активного выпрямителя/инвертора.
Во втором контроллере может осуществляться преобразование командного сигнала регулирования мощности, определяемого уровнем мощности, которая должна передаваться из звена ПТ в сеть питания через второй активный выпрямитель/инвертор, в командный сигнал регулирования тока по поперечной оси для второго активного выпрямителя/инвертора и управление силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора для получения электрических параметров фильтра/сети питания, которые позволяют получить необходимый ток по поперечной оси для второго активного выпрямителя/инвертора,
Вышеуказанная стадия преобразования командного сигнала регулирования мощности в командный сигнал регулирования тока по поперечной оси может быть осуществлена путем деления командного сигнала регулирования мощности на сигнал, который определяется напряжением на сетевых клеммах фильтра. В альтернативном варианте командный сигнал регулирования мощности может быть преобразован в командный сигнал регулирования тока по поперечной оси путем деления командного сигнала регулирования мощности на сигнал, полученный путем фильтрации сигнала, который определяется напряжением на сетевых клеммах фильтра.
Во втором контроллере может использоваться дополнительный командный сигнал регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, осуществляться сравнение дополнительного командного сигнала регулирования напряжения на звене ПТ с сигналом обратной связи по напряжению на звене ПТ для определения командного сигнала регулирования тока по поперечной оси без ограничения и ограничение командного сигнала регулирования тока по поперечной оси без ограничения до величины, определяемой сигналом ограничения, который определяется по командному сигналу регулирования мощности, для определения командного сигнала регулирования тока по поперечной оси для второго активного выпрямителя/инвертора при запуске и при нормальном режиме работы силового преобразователя.
Способ может также содержать стадию прибавления командного сигнала регулирования тока по поперечной оси без ограничения к сигналу положительной обратной связи по току по поперечной оси, который получают из следующих сигналов: сигнала, определяемого мощностью генератора, сигнала обратной связи по напряжению, измеренному на сетевых клеммах фильтра, и сигнала усиления, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания.
Сигнал, определяемый мощностью генератора, может быть подан во второй контроллер из первого контроллера. В альтернативном варианте во второй контроллер может быть подан сигнал, определяемый мощностью генератора, из которого вычитается выходной сигнал ПИ-регулятора регулятора напряжения звена ПТ первого контроллера, который используется во втором контроллере только при провалах напряжения в сети питания.
Во втором контроллере может пересчитываться сигнал ограничения, который определяется из командного сигнала регулирования мощности в соответствии с преобладающими характеристиками напряжения сети питания при провалах напряжения в сети питания. Использование слова "провал" в настоящем описании в отношении падения напряжения в сети питания относится к ситуации, когда напряжение в сети питания падает ниже его номинального значения в результате симметричного или асимметричного нарушения сети.
Звено ПТ может содержать конденсатор, и силовой преобразователь может содержать дополнительно датчик тока для измерения тока, протекающего через конденсатор, и выдачи выходного сигнала. В этом случае способ может содержать дополнительно стадии вычитания выходного сигнал датчика тока из сигнала, полученного из сигнала, определяемого мощностью генератора, для получения предполагаемого сигнала, который прибавляется к выходному сигналу регулятора напряжения на звене ПТ первого контроллера для получения командного сигнала регулирования тока звена ПТ для первого активного выпрямителя/инвертора. В альтернативном варианте способ может содержать дополнительно стадии вычитания выходного сигнал датчика тока из сигнала, полученного из сигнала, определяемого мощностью генератора, для получения логического сигнала, который фильтруется и прибавляется к выходному сигналу регулятора напряжения на звене ПТ первого контроллера для получения командного сигнала регулирования тока звена ПТ для первого активного выпрямителя/инвертора.
В альтернативном варианте силовой преобразователь может содержать дополнительно датчик напряжения для измерения напряжения на звене ПТ и обеспечения сигнала обратной связи по напряжению звена ПТ и средства для измерения скорости изменения сигнала обратной связи по напряжению на звене ПТ. В этом случае способ может содержать дополнительно стадии пересчета интегральной составляющей ПИ-регулятора регулятора напряжения на звене ПТ первого контроллера с помощью заданного коэффициента, когда сигнал обратной связи по напряжению на звене ПТ превышает первое пороговое значение и скорость изменения сигнала обратной связи по напряжению на звене ПТ превышает второе пороговое значение.
При провале напряжения в сети питания командный сигнал регулирования тока по поперечной оси для второго активного выпрямителя/инвертора может быть получен из сигнала, ограниченного по скорости нарастания, полученного из номинального предела мощности второго активного выпрямителя/инвертора, который пересчитывается в зависимости от преобладающих характеристик напряжения в сети питания.
Во втором контроллере может осуществляться сравнение командного сигнала регулирования напряжения, определяемого напряжением, которое должно быть получено на сетевых клеммах фильтра, с сигналом обратной связи по напряжению, измеренному на сетевых клеммах фильтра, для определения командного сигнала регулирования тока по продольной оси для второго активного выпрямителя/инвертора, и управление силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора для получения электрических параметров фильтра/сети питания, которые позволяют получить необходимый ток по продольной оси для второго активного выпрямителя/инвертора.
Командный сигнал регулирования тока по продольной оси может быть пересчитан во втором контроллере в соответствии с преобладающими характеристиками напряжения в сети питания.
Во втором контроллере может быть пересчитан сигнал ошибки, определяемой разностью между командным сигналом регулирования напряжения, определяемым уровнем напряжения, который должен быть получен на сетевых клеммах фильтра, и сигналом обратной связи по напряжению, измеренному на сетевых клеммах фильтра, в соответствии с сигналом, полученным из командного сигнала регулирования тока по продольной оси.
Может быть получен сигнал скорости, определяемый скоростью движущейся части генератора, и использован для получения командного сигнала регулирования мощности. Сигнал скорости может быть пересчитан с использованием одной или нескольких фильтр-функций и использован для обеспечения демпфирования резонансных колебаний вала или механизма привода.
Командный сигнал регулирования мощности может быть определен по таблице мощность-скорость или с использованием математической функции, и пересчитанный сигнал скорости является входным параметром для таблицы мощность-скорость или входной переменной, по которой вычисляется математическая функция. Командный сигнал регулирования мощности может быть также просуммирован с сигналом, полученным из отфильтрованного сигнала скорости.
В настоящем изобретении также предлагается способ осуществления работы несколько вышеописанных силовых преобразователей, подключенных параллельно к сети питания, обеспечивающей номинальное фиксированное напряжение с номинальной фиксированной частотой, в точке параллельного подключения, причем способ содержит стадию определения командного сигнала регулирования напряжения, определяемого напряжением, которое должно быть получено на сетевых клеммах фильтра каждого силового преобразователя, путем сравнения командного сигнала верхнего уровня регулирования напряжения и сигнала верхнего уровня обратной связи по напряжению, которое измеряется в точке параллельного подключения преобразователей к сети питания. Способ может также содержать стадию измерения сигнала верхнего уровня обратной связи по напряжению либо на стороне сети питания, либо на стороне параллельного подключения повышающего трансформатора, включенного электрически между точкой параллельного подключения и сетью питания.
В настоящем изобретении также предлагается способ осуществления работы ветряной турбины, содержащей генератор, вырабатывающий регулируемое напряжение с регулируемой частотой, который содержит статор и ротор, блок турбины, содержащей по меньшей мере одну лопасть для вращения ротора генератора, и силовой преобразователь, который обеспечивает сопряжение генератора с сетью питания, которая должна обеспечивать номинальное фиксированное напряжения с номинальной фиксированной частотой, причем силовой преобразователь содержит:
первый активный выпрямитель/инвертор, электрически соединенный со статором генератора и содержащий силовые полупроводниковые вентили;
второй активный выпрямитель/инвертор, содержащий силовые полупроводниковые вентили;
звено ПТ, включенное между первым активным выпрямителем/инвертором и вторым активным выпрямителем/инвертором;
фильтр, включенный между вторым активным выпрямителем/инвертором и сетью питания, причем фильтр содержит сетевые клеммы;
первый контроллер для первого активного выпрямителя/инвертора; и
второй контроллер для второго активного выпрямителя/инвертора;
причем при изменении скорости ветра способом предусматривается выполнение следующих стадий:
управление вторым активным выпрямителем/инвертором для изменения уровня энергии, экспортируемой из звена ПТ при отклонениях напряжения на звене ПТ от необходимого уровня; и
управление первым активным выпрямителем/инвертором для подачи из генератора достаточного тока в звено ПТ через мост генератора для восстановления необходимого уровня напряжения на звене ПТ.
Чертежи
Фигура 1 - схема, иллюстрирующая использование предлагаемого в изобретении силового преобразователя в качестве интерфейса между ветряной турбиной, вращающей генератор с регулируемой скоростью, и сетью питания с фиксированной частотой.
Фигура 2 - блок-схема, на которой более детально показано управление звеном ПТ для моста генератора (активный выпрямитель) фигуры 1.
Фигура 3 - блок-схема, на которой более детально показано регулирование тока для моста генератора (активный выпрямитель) фигуры 1.
Фигура 4 - блок-схема, на которой более детально показано регулирование мощности для моста сети (инвертор) фигуры 1.
Фигура 5 - блок-схема, на которой более детально показано регулирование тока для моста сети (инвертор) фигуры 1.
Фигура 6 - схема, иллюстрирующая принцип параллельного подключения нескольких предлагаемых в настоящем изобретении силовых преобразователей к электрической сети для создания ветроэлектростанции.
Фигура 7 - схема, иллюстрирующая принцип регулирования напряжения ветроэлектростанции.
Фигура 8 - блок-схема, иллюстрирующая использование первого альтернативного варианта предлагаемого в настоящем изобретении силового преобразователя в качестве интерфейса между ветряной турбиной, вращающей генератор с регулируемой скоростью, и сетью питания с постоянной частотой.
Фигура 9 - блок-схема, на которой более детально показано регулирование напряжения звеном ПТ и соответствующего тока для моста генератора (активный выпрямитель) фигуры 8.
Фигура 10 - блок-схема, на которой более детально показано регулирование мощности, регулирование напряжения сети и соответствующего тока для моста сети (инвертор) фигуры 8.
Фигура 11 - блок-схема, иллюстрирующая использование второго альтернативного варианта предлагаемого в настоящем изобретении силового преобразователя в качестве интерфейса между ветряной турбиной, вращающей генератор с регулируемой скоростью, и сетью питания с постоянной частотой.
Фигура 12 - блок-схема, на которой более детально показан первый вариант управления звеном ПТ для моста генератора (активный выпрямитель) фигуры 11.
Фигура 13 - блок-схема, на которой более детально показано регулирование мощности для моста сети (инвертор) фигуры 11.
Фигура 14 - блок-схема, на которой более детально показан второй вариант управления звеном ПТ для моста генератора (активный выпрямитель) фигуры 11.
Схема соединений силового преобразователя
Общая схема соединений силового преобразователя описывается со ссылками на фигуру 1.
Силовой преобразователь используется качестве интерфейса между ветряной турбиной 2, вращающей асинхронный генератор 4 переменного тока, и электрической сетью с номинальной фиксированной частотой (на фигуре 1 указано СЕТЬ). Ветряная турбина обычно содержит три лопасти (возможны также варианты в форме одной лопасти, двух лопастей или же число лопастей может быть больше трех), которые установлены на вращающемся валу и угол наклона которых может изменяться с помощью исполнительного механизма для оптимизации и/или ограничения улавливания энергии ветра генератором 4. Для соединения вращающегося вала с ротором генератора 4 с регулируемой частотой вращения используется редуктор 8. В некоторых случаях вращающийся вал может быть соединен непосредственно с ротором генератора. Это означает, что скорость вращения ротора изменяется в зависимости от скорости ветра, и частота напряжения, вырабатываемого на статоре генератора 4 ("частота на статоре"), может поэтому изменяться в широких пределах. Ветряная турбина показана в общем виде на фигуре 1, и несколько таких турбин могут быть соединены вместе для создания ветроэлектростанции.
Клеммы генератора 4 присоединяются к клеммам переменного тока трехфазного моста 10 генератора, который при нормальной работе функционирует в качестве активного выпрямителя, выход которого подается на звено 12 ПТ. Мост 10 генератора построен по обычной трехфазной двухступенчатой схеме, в состав которой входят силовые полупроводниковые вентили, управление которыми полностью осуществляется с использованием техники широтно-импульсной модуляции. Однако на практике мост 10 генератора может иметь любую схему, такую как, например, трехступенчатая схема с нейтральной точкой или многоступенчатая схема (например, схема Фоха-Майнарда (Foch-Maynard)). Получение импульсных управляющих сигналов, которые используются для управления силовыми полупроводниковыми вентилями, описано ниже более подробно.
Выходное постоянное напряжение моста 10 генератора подается на клеммы ПТ моста 14 сети, который в нормальном режиме работы служит в качестве инвертора. Основное управление выходным постоянным напряжением осуществляется за счет управления мостом 10 генератора. Так же, как и мост 10 генератора, мост 14 сети построен по аналогичной трехфазной двухступенчатой схеме, в состав которой входят силовые полупроводниковые вентили, управление которыми полностью осуществляется с использованием техники широтно-импульсной модуляции. Однако на практике мост 14 сети может быть построен по любой подходящей схеме, как это было указано выше для моста 10 генератора. Управление мостом 14 сети осуществляется для выполнения двух основных задач, а именно в отношении активной мощности и напряжения сети. Подробное описание такого управления приведено ниже. Формирование импульсных управляющих сигналов, которые используются для управления силовыми полупроводниковыми вентилями, описано ниже более подробно.
Как указывается в настоящем описании, активное выпрямление (основной режим работы моста 10 генератора) - это преобразование энергии, поступающей с клемм трехфазного генератора в форме переменного тока, в энергию, подаваемую на звено ПТ, и инвертирование (основной режим работы моста 14 сети) - это преобразование энергии, поступающей из звена ПТ моста трехфазной сети на его клеммы ПТ. Однако, как это будет ясно из описания, могут быть случаи, когда будет необходимо или желательно использовать мост 10 генератора в качестве инвертора, а мост 14 сети использовать в качестве активного выпрямителя. Например, на этапе запуска мост 14 сети будет работать в качестве активного выпрямителя для подачи энергии из сети на звено 12 ПТ. В тех случаях, когда происходит провал напряжения сети, мост 10 генератора может работать либо в режиме активного выпрямителя, либо в режиме инвертора, в зависимости от потребностей регулирования напряжения на звене 12 ПТ. Действия контроллеров моста 10 генератора и моста 14 сети (контроллер 18 и контроллер 46, соответственно, описанные ниже) взаимосвязаны, так что в случае провала напряжения сети, при котором энергия не забирается из сети, в зависимости от параметров и уровня падения напряжения, силовой преобразователь все-таки сможет подавать энергию в сеть питания.
Также может быть полезным для целей технического обслуживания и в том случае, когда ветряная турбина вращается с очень низкой скоростью, чтобы генератор 4 работал в двигательном режиме. В этом случае энергия может подаваться из сети в генератор 4 через мост 14 сети, работающий в режиме активного выпрямителя, и мост 10 генератора, работающий в режиме инвертора.
Выходное переменное напряжение моста 14 сети фильтруется катушками 16 индуктивности (возможны и другие фильтры) и подается в электрическую сеть питания с номинальной фиксированной частотой через повышающий трансформатор 6. В состав оборудования может быть включена защитная коммутационная аппаратура для обеспечения надежного подсоединения к электрической сети и для разделения системы генератора и сети в соответствии с различными эксплуатационными и другими требованиями.
Схема ветроэлектростанции
Как было указано выше, в состав ветроэлектростанции может входить несколько ветряных турбин, одна из которых показана в общем виде на фигуре 1. На фигуре 6 схематически показано для этого случая соединение нескольких силовых преобразователей 1a-1d в точке 72 параллельного подключения к сети (обозначение СЕТЬ на фигуре 6) с постоянной частотой напряжения питания. Силовые преобразователи 1a-1d содержат фильтры 16a-16d и повышающие трансформаторы 6а-6d. Дополнительный повышающий трансформатор 74 ветроэлектростанции устанавливается между точкой 72 параллельного подключения силовых преобразователей и сетью питания. На фигуре 6 показано, что сигнал обратной связи по напряжению ветроэлектростанции, который описан ниже более подробно со ссылками на фигуру 7, может быть измерен на стороне параллельного соединения (обозначение ОБРАТНАЯ СВЯЗЬ А ПО НАПРЯЖЕНИЮ ВЕТРОЭЛЕКТРОСТАНЦИИ) или на стороне сети (обозначение ОБРАТНАЯ СВЯЗЬ В ПО НАПРЯЖЕНИЮ ВЕТРОЭЛЕКТРОСТАНЦИИ) повышающего трансформатора 74 ветроэлектростанции. Преимущество измерения сигнала обратной связи по напряжению верхнего уровня на стороне сети повышающего трансформатора 74 ветроэлектростанции заключается в том, что при измерении на стороне параллельного соединения оно подлежит регулированию на повышающем трансформаторе. Этот эффект регулирования отсутствует, если измерение осуществляется на стороне сети. В альтернативном варианте сигнал обратной связи по напряжению ветроэлектростанции на стороне сети может быть рассчитан с использованием измерения сигнала напряжения обратной связи по напряжению ветроэлектростанции на стороне параллельного соединения, характеристик повышающего трансформатора 74 ветроэлектростанции и амплитуды и фазы тока, протекающего через повышающий трансформатор ветроэлектростанции.
Управление мостом генератора
Управление мостом 10 генератора рассматривается ниже со ссылками на фигуры 1-3.
В контроллер 18 моста генератора поступает командный сигнал VDC_GEN* регулирования напряжения на звене ПТ и сигнал VDC_FB обратной связи по напряжению, соответствующий напряжению на звене ПТ. Сигнал VDC_FB вычитается из сигнала VDC_GEN*, и полученная разность подается в ПИ-регулятор 20 вместе с входными сигналами переменного коэффициента KI передачи интегрального регулирования и коэффициента КР передачи пропорционального регулирования для получения командного сигнала IDC_GEN* регулирования тока звена ПТ, являющегося эффективным током, который должен протекать в звене 12 ПТ при преобладающих условиях работы. Затем этот командный сигнал IDC_GEN* регулирования тока звена ПТ ограничивается в случаях неисправности сети сигналом IDC_LIM, поступающим из контроллера 46 моста сети (см. ниже) для формирования сигнала IDC_GEN*_LIM. Затем для преобразования ограниченного командного сигнала IDC_GEN*_LIM регулирования тока звена ПТ в командный сигнал IQ_GEN* регулирования тока по поперечной оси, относящийся к фазному току генератора, сигнал IDC_GEN*_LIM сначала умножается на сигнал VDC_FB обратной связи по напряжению для получения сигнала POWER_GEN мощности. Затем этот сигнал POWER_GEN мощности преобразуется в блоке 92 функции IQ_GEN* калькулятора в командный сигнал IQ_GEN* регулирования тока по поперечной оси в соответствии со следующей формулой:

где VD_FF - составляющая положительной обратной связи постоянного напряжения в регуляторе 26 тока (см. фигуру 2), ID_GEN* - командный сигнал регулирования тока по продольной оси, поступающий из блока 32 характеристики насыщения, и VQ_FF - составляющая положительной обратной связи напряжения по поперечной оси, поступающей из регулятора 26 тока.
Командный сигнал IQ_GEN* регулирования тока по поперечной оси ограничивается функцией ограничения, для того чтобы он оставался в рабочей области характеристики генератора и номинальных значений напряжений и токов мостов генератора и сети. Это ограничение определяется по справочной таблице, значения которой рассчитываются в автономном режиме на основании параметров эквивалентной схемы электрической машины, номинальных параметров привода и требуемого диапазона, и созданная таким образом таблица вводится в функциональный блок 22. Справочная таблица используется в процессе работы силового преобразователя путем подачи в функциональный ограничительный блок 22 сигнала N обратной связи по скорости ротора (или сигнала оцениваемой скорости ротора) и использования полученного сигнала в качестве ограничивающей величины для функционального блока 24 ограничения сигнала IQ_GEN*. Затем полученный ограниченный командный сигнал IQ_GEN*_LIM регулирования тока по поперечной оси подается в регулятор 26 тока (ниже описан более подробно). Ограниченный командный сигнал IQ_GEN*_LIM регулирования тока по поперечной оси используется также для определения частоты скольжения, которая должна устанавливаться в генераторе 4 для обеспечения передачи необходимой мощности из генератора в звено 12 ПТ. Частота WS скольжения определяется в соответствии со следующим выражением:

где RR - сопротивление ротора, LM - индуктивность намагничивания, Ф* - командный сигнал управления магнитным потоком генератора, и LR - индуктивность рассеяния ротора.
В результате интегрирования частоты WS скольжения получают выходную величину ӨS, угол скольжения. В результате интегрирования выходного сигнала измерителя 28 скорости получают ӨR, вычисленный угол ротора. (Измерение скорости в функциональном блоке 28 может быть заменено непосредственным измерением положения ротора с помощью инкрементного датчика положения или аналогичного устройства.) Затем может быть вычислен угол ӨО магнитного потока ротора суммированием угла ӨS скольжения и угла ӨR ротора. Угол ӨO магнитного потока ротора - это угол, при котором комбинация напряжения VD по продольной оси и напряжение VQ по поперечной оси должна быть подана на клеммы статора генератора 4 с использованием генератора 30 широтно-импульсной модуляции. Ниже приводится более подробное описание. Следует заметить, что для синхронных генераторов стадия определения и интегрирования частоты скольжения отсутствует.
Командный сигнал Ф* регулирования магнитного потока генератора (который может быть постоянным или регулируемым в зависимости от требуемых характеристик системы) подается в функциональный блок 32, содержащий характеристику насыщения индуктивности намагничивания генератора. Характеристика насыщения определяется либо прямым измерением при вводе генератора в эксплуатацию, либо по результатам испытаний генератора на заводе. Выходом функционального блока 32 характеристики насыщения является сигнал тока намагничивания, который преобразуется в командный сигнал ID GEN* регулирования тока по поперечной оси, подаваемый в регулятор 26 тока. Для синхронных генераторов командный сигнал регулирования тока по продольной оси определяется требованиями к напряжению на клеммах генератора для различных скоростей и различных условий нагрузки. С помощью установки командного сигнала регулирования тока по продольной оси для синхронного генератора возбуждение может быть изменено действием моста 10 генератора для оптимизации напряжения на клеммах и полного кпд генератора для каждого рабочего режима.
Регулятор 26 тока для моста 10 генератора содержит два регулятора, один для тока по продольной оси и другой для тока по поперечной оси. В общем, регулятор 26 тока работает в синхронной системе координат, выровненной по углу магнитного потока ротора. На фигуре 3 показаны регуляторы составляющих токов по продольной и поперечной осям моста 10 генератора.
Кроме ограниченного командного сигнала IQ_GEN*_LIM регулирования тока по поперечной оси и командного сигнала ED_GEN* регулирования тока по продольной оси в регулятор 26 тока также подается сигнал IQ_GEN обратной связи по току по поперечной оси и сигнал ID_GEN обратной связи по току по продольной оси, которые получают из измерений фазных токов IU, IV и IW генератора. Преобразование трехфазных компонент в стационарной системе координат в составляющие по продольной и поперечной осям в синхронной системе координат осуществляется в блоке 34 комбинированного преобразования Кларка-Парка. При выполнении преобразования используется угол ӨO магнитного потока ротора. Как можно видеть на фигуре 3, в регулятор 26 тока также поступают следующие дополнительные сигналы: командный сигнал Ф* регулирования магнитного потока генератора (который может быть постоянным или переменным в зависимости от требуемых характеристик системы) и частота W0 статора генератора. Частоту W0 статора можно определить суммированием частоты скольжения и частоты ротора. Частота ротора может быть получена по измеренной скорости ротора и числу полюсов генератора.
Регулятор 26 тока сравнивает командный сигнал ID_GEN* регулирования тока по продольной оси с сигналом ID_GEN обратной связи по току по продольной оси и ограниченный командный сигнал IQ_GEN*_LIM регулирования тока по поперечной оси с сигналом IQ_GEN обратной связи по току по поперечной оси и направляет полученные величины ошибок в независимые ПИ-регуляторы. Затем выходные сигналы ПИ-регуляторов суммируются с сигналами перекрестных связей, полученными умножением командных сигналов регулирования тока и параметров машины для получения полного выходного напряжения для продольной и поперечной осей, VD_GEN* и VQ_GEN* соответственно. Выражения для определения сигналов перекрестных связей, приведенные на фигуре 3, эмулируют стандартные выражения для напряжения для генератора 4 в устойчивом режиме работы. В выражениях для определения сигналов перекрестных связей величина δLS является индуктивностью рассеяния статора генератора и RS - сопротивлением статора генератора.
Окончательные выходные напряжения VD_GEN* и VQ_GEN* регулятора 26 тока преобразуются из декартовой системы координат в полярные координаты в преобразователе 38 координат. Полная величина напряжения V_GEN* вычисляется в соответствии с уравнением:

и подается в контроллер 36 импульсных командных сигналов. Угол между полной величиной напряжения V_GEN* и напряжением VQ_GEN* по поперечной оси равен θ GEN и вычисляется как арктангенс VD_GEN*/VQ_GEN* в соответствии с уравнением:

Угол Ө_GEN между полной величиной напряжения V_GEN* и напряжением VQ_GEN* по поперечной оси складывается с углом ӨO магнитного потока ротора для определения угла, под которым полное напряжение должно подаваться на клеммы статора генератора 4.
Раздельные верхний (U) и нижний (L) импульсные командные сигналы для трех фаз U, V и W, которым соответствуют раздельные сигналы UU, UL, VU, VL, WU и WL моста 10 генератора, вычисляются в генераторе 30 широтно-импульсной модуляции (генератор ШИМ) с использованием полной величины напряжения V_GEN*, суммы углов Ө_GEN и Ө0 и частоты широтно-импульсной модуляции. Сигнал VDC_FB обратной связи по напряжению на звене ПТ также учитывается в вычислениях ШИМ. Сигнал VDC_FB обратной связи по напряжению на звене ПТ может быть получен независимо при использовании независимых контроллеров для моста 10 генератора и моста 14 сети соответственно. В частности, это необходимо, когда мост 10 генератора и мост 14 сети разнесены в пространстве, и между емкостями звена ПТ мостов имеется существенная индуктивная связь. В тех случаях, когда для каждого моста обеспечивается независимо полученный сигнал обратной связи по напряжению на звене ПТ, можно легко понять, что могут быть выполнены следующие замены:
Для моста 10 генератора: VDC_FB=VDC_FB_GEN
Для моста 14 сети: VDC_FB=VDC_FB_NET
В регуляторе 26 тока также вырабатывается сигнал положительной обратной связи по мощности, определяемый мощностью POWER FF генератора, которая вычисляется следующим образом:

Он используется как сигнал обратной связи в контроллере 46 моста сети.
Управление мостом сети
Управление мостом 14 сети объясняется ниже со ссылками на фигуры 1 и 4-7. Управление осуществляется по напряжению и отличается от схемы управления коэффициентом электрической мощности и схемы регулирования реактивной мощности, используемой в обычных силовых преобразователях, как описано выше.
Схема регулирования напряжения содержит две ступени. Как показано на фигуре 7, первая ступень определяется на уровне ветроэлектростанции и осуществляется в соответствии с командным сигналом регулирования напряжения ветроэлектростанции, и обычно устанавливается компанией, обслуживающей ветроэлектростанцию. Этот командный сигнал регулирования напряжения ветроэлектростанции сравнивается с сигналом обратной связи по напряжению ветроэлектростанции, и расхождение между двумя сигналами подается на контроллер 40 с пропорциональным и интегральным регулированием (ПИ-регулятор) для определения командного сигнала VTURB* напряжения турбины, который передается во все турбины T1-TN ветроэлектростанции. Вторая ступень управления осуществляется в отношении каждой отдельной ветряной турбины для регулирования ее выходного напряжения в соответствии с командным сигналом VTURB* напряжения турбины.
Как показано на фигуре 4, в каждой из ветряных турбин ветроэлектростанции командный сигнал VTURB* напряжения турбины сравнивается в суммирующем узле 42 с сигналом VQ_NET обратной связи от устройства нижнего уровня напряжения по поперечной оси (см. ниже), который получают по измерению трехфазного напряжения на стороне сети катушек 16 индуктивности. Разность между указанными двумя сигналами подается на ПИ-регулятор 44 для формирования командного сигнала ID_NET* регулирования реактивного тока, который подается через ограничительный блок 66 на регулятор 58 тока, который описан ниже более подробно.
Командный сигнал ID_NET* регулирования реактивного тока также подается по цепи обратной связи через пропорциональный регулятор 48 в суммирующий узел 42 для дополнительного изменения сигнала разности напряжений. При этом обеспечивается падающая характеристика, так чтобы при параллельном подключении нескольких ветряных турбин к трансформатору ветроэлектростанции через различные импедансы подключения обеспечивалось более равномерное распределение реактивного тока между ветряными турбинами. Падающая характеристика коэффициента усиления может быть подогнана к конкретной конфигурации сети для обеспечения необходимого баланса токов между ветряными турбинами и выполнения ограничений по номинальным параметрам. Ограничения накладываются на командные сигналы ID_NET* и IQ_NET* регулирования токов по продольной и поперечной осям соответственно, как описано ниже для случаев провалов напряжения в сети.
Схема регулирования напряжения интегрирована в контроллер 46 моста сети следующим образом. В контроллер 46 моста сети подается пять основных входных сигналов и семь основных сигналов обратной связи, которые используются для получения импульсных командных сигналов, управляющих работой мощных полупроводниковых переключателей моста 14 сети.
Используются следующие входные сигналы: командный сигнал VDC_NET* регулирования напряжения на звене ПТ для моста сети, командный сигнал Р* регулирования экспорта мощности, командный сигнал VTURB* регулирования напряжения турбины, параметр НОМИНАЛЬНАЯ МОЩНОСТЬ ВОЗБУЖДЕНИЯ, определяющий номинальный ток возбуждения, и сигнал положительной обратной связи по мощности, который подается из контроллера 18 моста генератора и определяется мощностью генератора. Сигналы обратной связи: три измерения VRY, VYB и VBR фазных напряжений (а именно измерения напряжения, выполненные на так называемых красной (R), желтой (Y) и голубой (В) выходных линиях, по которым мощность из моста 14 сети подается в сеть), три измерения IR, IY и IB фазных токов и сигнал VDC FB обратной связи по напряжению, определяемый напряжением на звене ПТ. Сигналы обратной связи используются для получения следующих сигналов обратного связи от устройства нижнего уровня по напряжению и току для моста 14 сети по продольной и поперечной осям: VD_NET, VQ_NET, ID_NET и IQ_NET. Кроме того, управляющий сигнал IDC_LIM передается от контроллера 46 моста сети в контроллер 18 моста генератора для разрешения быстрого снижения мощности и скоординированного управления между контроллерами при возникновении нарушений сети. В этом случае регулирование напряжения на звене ПТ распределяется между мостами сети и генератора, так что активная мощность не отбирается из сети, и обеспечивается выполнение требований по необходимой поддержке напряжения сети и передаче мощности.
Функциональный блок 68 содержит систему фазовой автоподстройки (PLL) для получения сигнала ӨMAINS, который является мерой угла напряжения сети.
Командный сигнал VDC_NET* регулирования напряжения на звене ПТ необходим только для выполнения требований по запуску, для поддержания соединения с сетью при отсутствии ветра и разрешения быстрого согласованного регулирования напряжения на звене ПТ контроллером 18 моста генератора и контроллером 46 моста сети в случаях нарушений сети. В процессе работы сигнал VDC_FB обратной связи по напряжению вычитается из командного сигнала VDC_NET* регулирования напряжения на звене ПТ, и результирующий сигнал подается в ПИ-регулятор 50 для получения сигнала VDC_ПИ_IQ_NET*. Сигнал IQ_FF, задающий ток сети по поперечной оси, который необходим для передачи мгновенной мощности генератора, вычисляется в функциональном блоке 71 с использованием сигнала POWER_FF положительной связи по мощности, сигнала, представляющего напряжение VQ_NET сети и сигнала PFF_GAIN коэффициента усиления, снимаемого с выхода ограничителя 66. Затем этот сигнал прибавляется к сигналу VDC_ПИ_IQ_NET* для получения сигнала IQ_NET* без ограничения. Полученный сигнал ограничивается ограничителем 52, в котором заложена ограничительная характеристика, определяемая меньшей из двух величин: P*/VQ_NET или предельной величиной, полученной в результате требований для случаев провала напряжения в сети.
Как можно видеть на фигуре 1, сигнал N обратной связи по скорости ротора, поступающий из датчика 54 скорости (или в альтернативном варианте из вычисленного сигнала скорости ротора), фильтруется для получения первого отфильтрованного сигнала N' скорости и второго отфильтрованного сигнала N'2 скорости. Второй отфильтрованный сигнал N'2 скорости используется для демпфирования резонансных колебаний вала с использованием коэффициента KD усиления демпфирования. Первый отфильтрованный сигнал N' скорости является входным параметром для заранее подготовленной таблицы 56 значений потребной мощности в зависимости от значений отфильтрованной скорости. Такая таблица может использоваться вместе с ПИ-регулятором. Как показано на фигуре 1, полученный командный сигнал Р* регулирования экспорта мощности, являющийся суммой сигнала демпфирования и сигнала потребной мощности, полученной из таблицы, подается в контроллер 46 моста сети. Здесь командный сигнал Р* регулирования экспорта мощности делится на сигнал VQ_NET обратной связи от устройства нижнего уровня по напряжению по поперечной оси для получения сигнала ограничения командного сигнала IQ_NET* регулирования тока по поперечной оси в нормальном режиме работы. В альтернативном варианте командный сигнал Р* регулирования экспорта мощности может быть преобразован в командный сигнал IQ_NET* регулирования тока по поперечной оси путем деления командного сигнала Р* регулирования экспорта мощности на отфильтрованный сигнал VQ_NET обратной связи от устройства нижнего уровня по напряжению по поперечной оси, который получают из напряжения на сетевых клеммах катушек 16 индуктивности.
Ограниченный сигнал IQ_NET*_LIM потребного тока по поперечной оси, который выдается на выход ограничителя 52, является входным сигналом для регулятора 58 тока. Регулятор 58 тока для моста 14 сети содержит два регулятора, один для тока по продольной оси и другой для тока по поперечной оси. В общем, регулятор 58 тока работает в синхронной системе координат, выровненной с напряжением VQ_NET сети по поперечной оси. На фигуре 5 приведены общие схемы регуляторов составляющих токов по продольной и поперечной осям моста 14 сети.
Кроме ограниченного командного сигнала IQ_NET*_LIM регулирования тока по поперечной оси и ограниченного командного сигнала ID_NET*_LIM регулирования тока по продольной оси, который выдается на выход ограничителя 66, в регулятор 58 тока также подается сигнал IQ_GEN обратной связи по току по поперечной оси и сигнал ID_GEN обратной связи по току по продольной оси, которые получают из измерений фазных токов IR, IY и IB моста сети. Преобразование трехфазных компонент в стационарной системе координат в составляющие по продольной и поперечной осям в синхронной системе координат осуществляется в блоке 70 комбинированного преобразования Кларка-Парка. При выполнении преобразования используется угол ӨMAINS напряжения сети.
Регулятор 58 тока при работе сравнивает ограниченный командный сигнал ID_NET*_LIM регулирования тока по продольной оси с сигналом ID_NET обратной связи по току по продольной оси и ограниченный командный сигнал IQ_NET*_LIM регулирования тока по поперечной оси с сигналом IQ_NET обратной связи по току по поперечной оси и направляет полученные величины ошибок в независимые ПИ-регуляторы. Затем выходные сигналы ПИ-регуляторов суммируются с сигналами перекрестных связей, полученными умножением требуемых значений токов на значения импедансов основных цепей сети для получения полного выходного напряжения для продольной и поперечной осей, VD_NET* и VQ_NET* соответственно. Выражения для определения сигналов перекрестных связей, приведенные на фигуре 5, эмулируют стандартные выражения для напряжения для сети в устойчивом режиме работы. В выражениях для определения сигналов перекрестных связей LN - это индуктивность фильтра сети, и WN - частота сигнала напряжения сети.
Окончательные выходные напряжения VD_NET* и VQ_NET* регулятора 58 тока преобразуются из декартовой системы координат в полярные координаты в преобразователе 64 координат. Полная величина напряжения V_NET* вычисляется в соответствии с уравнением:

и подается в контроллер 62 импульсных командных сигналов. Угол между полной величиной напряжения V_NET* и напряжением VQ_NET* по поперечной оси равен Ө_NET и вычисляется как арктангенс VD_NET*/VQ_NET* в соответствии с уравнением:

Угол Ө NET между полной величиной напряжения V_NET* и напряжением
VQ_NET * по поперечной оси складывается с углом ӨMAINS угла напряжения сети для определения угла, под которым полное напряжение должно подаваться мостом 14 сети на основную схему сети.
Раздельные верхний (U) и нижний (L) импульсные командные сигналы для трех фаз R, Y и В, которым соответствуют раздельные сигналы RU, RL, YU, YL, BU и BL моста 14 сети, вычисляются в генераторе 60 широтно-импульсной модуляции с использованием полной величины напряжения V_NET*, суммы углов Ө_NET и ӨMAINS и частоты широтно-импульсной модуляции. Сигнал VDC_FB обратной связи по напряжению на звене ПТ также учитывается в вычислениях ШИМ. Сигнал VDC_FB обратной связи по напряжению на звене ПТ может быть получен независимо при использовании независимых контроллеров для моста 14 сети и моста 10 генератора соответственно. В частности, это необходимо, когда мост 10 генератора и мост 14 сети разнесены в пространстве, и между емкостями звена ПТ мостов имеется существенная индуктивная связь. В тех случаях, когда для каждого моста обеспечивается независимо полученный сигнал обратной связи по напряжению на звене ПТ, можно легко понять, что могут быть выполнены следующие замены:
Для моста 14 сети: VDC_FB=VDC_FB_NET
Для моста 10 генератора: VDC_FB=VDC_FB_GEN
В тех случаях, когда происходит провал напряжения в сети, в ограничителе 66 вычисляются соответствующие величины тока по продольной и поперечной осям, которые могут обеспечиваться мостом 14 сети (с учетом ограничений по нагреву), а также вычисляется максимальный ток IDC_LIM звена ПТ генератора. Сигнал IDC_LIM, поступающий из контроллера 46 моста сети в контроллер 18 моста генератора, используется для быстрой установки уровня тока, который может быть обеспечен мостом 10 генератора на промежуточном звене 12 ПТ.
Для различных кодов сетей существуют различные требования, которые отдают приоритет активному или реактивному выходному току и устанавливают разное процентное содержание реактивного тока в зависимости от величины провала напряжения. Иначе говоря, режим работы силового преобразователя зависит от того, каким образом заданы его параметры для работы в различных странах и регионах.
В целом, работа силового преобразователя принципиально отличается от работы обычных силовых преобразователей, которые были указаны выше, поскольку он поддерживает управление звеном 12 ПТ при провалах напряжения сети путем непосредственного управления передачей мощности от генератора 4. За счет поддержания управления звеном ПТ при провале напряжения в сети можно поддерживать требуемую величину реактивного выходного тока моста 14 сети, для того чтобы удовлетворять требования поддержки напряжения сети питания.
При провале напряжения сети регулятор напряжения на звене ПТ моста сети, который представляет собой ПИ-регулятор 50 и включенный перед ним суммирующий узел, становится главным регулятором системы силового преобразователя и выдает сигнал ограничения мощности и сигнал ограничения тока звена ПТ в мост 14 сети и мост 10 генератора соответственно, в зависимости от величины провала напряжения в сети.
Экспорт мощности из звена 12 ПТ определяется опорным сигналом мощности, подаваемым на мост 14 сети. По мере того, как все больше энергии экспортируется из звена 12 ПТ (звено разряжается), мост 10 генератора будет забирать все больше энергии из генератора 4 для подзарядки звена ПТ. Это совершенно отличается от традиционных четырехквадрантных силовых преобразователей, в которых энергия подается в звено постоянной связи для увеличения его напряжения в результате команды управления вращающим моментом, подаваемой на мост генератора. Затем экспорт энергии в сеть определяется действием контроллера моста сети, когда напряжение звена ПТ превысит задаваемое напряжение моста сети.
Работа силового преобразователя
Ниже описывается работа одного из возможных вариантов осуществления вышеописанной схемы силового преобразователя. При запуске командный сигнал VDC_NET* регулирования напряжения на звене ПТ устанавливается на 1050 вольт. Силовые полупроводниковые вентили моста 14 сети включены, и под управлением контроллера 46 моста сети они обеспечивают доведение напряжения на звене ПТ до 1050 вольт. Это почти всегда потребует импорта энергии из сети питания в звено 12 ПТ, так что выходной командный сигнал IQ_NET* регулирования тока по поперечной оси вызовет поток энергии в звено ПТ в этом режиме запуска.
Одновременно командный сигнал VDC_GEN* регулирования напряжения на звене ПТ, подаваемый на силовой контроллер 18 моста генератора, устанавливается на 1100 вольт.
Предполагая, что ветер дует и ветряная турбина 2 вращается, когда мост 10 генератора включен, он будет управлять током ID_GEN по продольной оси для получения величины магнитного потока в генераторе 4, необходимой для преобладающих значений скоростей, и ток IQ_GEN по поперечной оси регулируется под управлением моста 10 генератора для получения на звене ПТ напряжения 1100 вольт.
После повышения напряжения звена ПТ до 1100 вольт оно превысит значение, задаваемое командным сигналом регулирования напряжения на звене ПТ для моста 14 сети. В результате сигнал ошибки, полученный контроллером 46 моста сети путем вычитания командного сигнала VDC_NET* регулирования напряжения на звене ПТ из сигнала VDC_FB обратной связи по напряжению, будет действовать таким образом, чтобы энергия передавалась из звена 12 ПТ в сеть питания, причем величина такой передачи энергии будет ограничиваться (ограничитель 52) сигналом, полученным из командного сигнала Р* управления экспортом энергии. Сигнал N датчика скорости фильтруется для получения первого отфильтрованного сигнала N' и второго отфильтрованного сигнала N'2. Коэффициент KD усиления демпфирования, применяемый ко второму отфильтрованному сигналу N'2 скорости, обеспечивает демпфирование резонансных колебаний вала и приводного механизма турбины. Первый отфильтрованный сигнал N' скорости используется в качестве входного параметра таблицы 56, содержащей предварительно рассчитанные значения Р* в зависимости от N'. Командный сигнал Р* управления экспортом энергии, получаемый из таблицы 56, подается в контроллер 46 мощности моста 14 сети. Полученный командный сигнал Р* управления экспортом энергии делится на преобладающее напряжение VQ_NET сети по поперечной оси для получения ограничивающего сигнала, применяемого к выходному командному сигналу IQ_NET* регулирования тока по поперечной оси, полученного из командного сигнала VDC_NET* регулирования напряжения на звене ПТ для моста 14 сети.
При провале напряжения сети задание номинальной выходной мощности (VA) для активной и реактивной составляющих контроллера 46 моста сети будет определяться в соответствии с требованиями конкретного кода сети, для которого установлены параметры ветряной турбины. Предел полной мощности вычисляется по преобладающему значению V_NET напряжения, измеренному схемами обратной связи по напряжению сети, и номинальному току I_OVERLOAD инвертора сети. Более конкретно:
Предел полной мощности = 
На фигуре 4 входной сигнал НОМИНАЛЬНАЯ МОЩНОСТЬ ВОЗБУЖДЕНИЯ эквивалентен величине I_OVERLOAD в вышеприведенном уравнении.
Силовой преобразователь работает в динамическом режиме для адаптации к изменениям скорости ветра. Например, при увеличении скорости ветра скорость вращения ветряной турбины 2 также будет увеличиваться, в результате чего в контроллер 46 моста сети будет подаваться увеличенный командный сигнал Р* регулирования экспорта энергии. Контроллер 46 моста сети побуждает мост 14 сети экспортировать больше энергии из звена 12 ПТ в сеть питания. Увеличение количества энергии, которая экспортируется в сеть питания, приводит к падению напряжения на звене ПТ. Контроллер 18 моста генератора реагирует на это падение напряжения на звене ПТ действием регулятора 76 (ПИ-регулятор и включенный перед ним суммирующий блок) напряжения на звене ПТ, который будет побуждать мост 10 генератора забирать больше энергии из генератора 4 для увеличения тока, поступающего в звено 12 ПТ, до тех пор, пока не будет достигнуто новое состояние равновесия (то есть состояние, в котором количество энергии, передаваемой в сеть питания из моста 14 сети, будет равно количеству энергии, которая подается в мост 10 генератора из генератора 4). В этом состоянии равновесия напряжение на звене ПТ соответствует командному сигналу VDC_GEN* регулирования напряжения на звене ПТ. При снижении скорости ветра имеет место обратная последовательность операций управления.
В такой же ситуации, при увеличении скорости ветра, силовой преобразователь, описанный в патенте США №5083039, изменяет командный сигнал управления вращающим моментом, который подается в контроллер моста генератора, для увеличения вращающего момента генератора и, соответственно, увеличения потока энергии от генератора через мост генератора в звено ПТ. В результате, напряжение на звене ПТ увеличивается. Затем контроллер моста сети в ответ на увеличение напряжения на звене ПТ посредством своего регулятора напряжения на звене ПТ увеличивает количество энергии, которое экспортируется в сеть питания и, соответственно, уменьшает напряжение на звене ПТ до его опорного значения.
Поэтому в патенте США №5083039 описывается ситуация, в которой увеличенный поток энергии проходит через силовой преобразователь от генератора в звено ПТ в ответ на увеличение скорости ветра, и вторичной реакцией является экспорт энергии от звена ПТ в сеть питания через мост сети. Однако предлагаемый в настоящем изобретении силовой преобразователь работает противоположным образом, так что при повышении скорости ветра больше энергии отбирается из звена 12 ПТ мостом 14 сети, и вторичной реакцией является импорт энергии в звено ПТ из генератора 14 через мост 10 генератора для увеличения тока, поступающего в звено ПТ.
Альтернативные схемы силового преобразователя
Общие схемы двух различных альтернативных вариантов осуществления силового преобразователя описаны ниже со ссылками на фигуры 8-14. Альтернативные варианты силовых преобразователей имеют большое сходство с силовым преобразователем, схема которого приведена на фигуре 1, и их сходные части на схемах обозначены теми же самыми ссылочными номерами. В альтернативных вариантах силовых преобразователей исключается от одного до трех признаков силового преобразователя, схема которого представлена на фигуре 1, а именно: (i) командный сигнал VDC_NET* регулирования напряжения на звене ПТ для моста 14 сети, а также связанный с ним сигнал VDC_FB обратной связи и ПИ-регулятор 50, (ii) сигнал IDC_LIM, который подается из контроллера 46 моста сети и используется для ограничения командного сигнала IDC_GEN* регулирования тока звена ПТ при нарушениях работы сети, и (iii) сигнал POWER FF положительной обратной связи по мощности, который вырабатывается регулятором 26 тока.
В первом альтернативном варианте схемы силового преобразователя исключен только командный сигнал VDC_NET* регулирования напряжения на звене ПТ для моста 14 сети, а также связанный с ним сигнал VDC_FB обратной связи и ПИ-регулятор 50. В этом случае модифицируется действие сигнала IDC_LIM путем его замены новым сигналом IDC_FF положительной обратной связи. Модифицированный сигнал POWER_FF' положительной обратной связи по мощности остается действующим, однако он используется контроллером 46 моста сети только при провале напряжения в сети питания. Только в этом случае модифицированный сигнал POWER_FF' положительной обратной связи по мощности вычисляется вычитанием из стандартного сигнала POWER_FF положительной обратной связи по мощности, описанного выше, выходного сигнала ПИ-регулятора 20 регулятора 76 напряжения на звене ПТ. Это показано на фигуре 9. Модифицированный сигнал POWER_FF' положительной обратной связи по мощности используется в контроллере 46 моста сети вместе с сигналом (обозначен IQ_CAPACITY), относящимся к емкости IQ моста 14 сети при провале напряжения в сети питания, с сигналом POWER_LIMIT ограничения энергии и сигналом, относящимся к амплитуде преобладающего напряжения VQ_NET сети, для вычисления ограниченного командного сигнала IQ_NET*_LIM регулирования тока по поперечной оси, который используется при провале напряжения в сети питания. В этом случае нормальный источник сигнала IQ_NET*_LIM игнорируется.
В схемах, в которых исключен командный сигнал VDC_NET* регулирования напряжения на звене ПТ для моста сети, мост 14 сети может быть включен с использованием напряжения сети. Напряжение на звене ПТ определяется выпрямленной величиной напряжения в сети, которая номинально равна √2×VLL (то есть напряжение между линиями на клеммах переменного тока моста 14 сети). При этом обеспечивается источник питания постоянного тока, от которого могут запитываться вспомогательные схемы, такие как, например, микропроцессор(ы) контроллера 18 моста генератора и контроллера 46 моста сети, питание вентилей моста 10 генератора и моста 14 сети. Затем напряжение на звене ПТ может использоваться для обеспечения магнитного потока генератора 4 и его управления.
Если ветер дует и ветряная турбина 2 вращается, то генератор 4 может быть запущен для подачи энергии на звено 12 ПТ и установления на нем напряжения, которое равно значению командного сигнала VDC_GEN* регулирования напряжения на звене ПТ.
Общая схема первого альтернативного варианта осуществления силового преобразователя описана ниже со ссылками на фигуры 8-10. В этом варианте регулятор 76 напряжения на звене ПТ контроллера 18 моста генератора остается активным во всех рабочих режимах. В устойчивом режиме работы действие составляющей интегрального регулирования в ПИ-регуляторе 20 регулятора 76 напряжения на звене ПТ минимизируется путем введения сигнала IDC_FF положительной обратной связи от контроллера 46 моста сети. При провалах напряжения в сети питания сигнал IDC_FF положительной обратной связи обеспечивает информацию о величине ПТ, которая должна обеспечиваться мостом 14 генератора в ответ на изменения напряжения в сети питания. Сигнал IDC_FF вычисляется в функциональном блоке 90. За счет введения этих признаков изменения напряжения на звене ПТ при провалах напряжения в сети питания сводятся к минимуму. Необходимое действие составляющей интегрального регулирования в ПИ-регуляторе 20 регулятора 76 напряжения на звене ПТ также минимизируется, и поэтому требуется гораздо меньшие изменения напряжения на звене ПТ для увеличения или уменьшения интегральной величины до правильного значения, необходимого для достижения устойчивого режима работы.
Общая схема второго альтернативного варианта осуществления силового преобразователя описана ниже со ссылками на фигуры 11-14. В такой схеме напряжение на звене ПТ контроллера 46 моста сети исключается так же, как описано выше.
Первый вариант управления звеном ПТ для моста 10 генератора во втором альтернативном варианте силового преобразователя рассматривается ниже со ссылками на фигуры 11 и 12. Назначением сигнала IDC_LIM в силовом преобразователе, схема которого представлена на фигуре 1, является передача критической информации о преобладающих характеристиках напряжения сети и уровнях передаваемой энергии в контроллер 18 моста генератора. Это особенно важно при провалах напряжения в сети питания, когда возможности передачи энергии серьезно ограничены. В альтернативном варианте силового преобразователя сигнал IDC_LIM заменяется предполагаемым сигналом IDC_NET', который используется только контроллером 18 моста генератора.
Предполагаемый сигнал IDC_NET' вычисляется по информации, которая доступна контроллеру 18 моста генератора в соответствии со следующим уравнением:

Во втором альтернативном варианте силового преобразователя сигнал POWER_FF мощности генератора получают из регулятора 26 тока контроллера 18 моста генератора (см. фигуру 3) в соответствии со следующим уравнением:

Однако сигнал POWER_FF мощности генератора не подается в контроллер 46 моста сети, а используется только контроллером 18 моста генератора для получения предполагаемого сигнала IDC_NET'. (Сигнал POWER_FF имеет здесь тот же источник, что и сигнал POWER_FF в первом варианте осуществления изобретения, представленном на фигуре 2. В настоящем описании используется то же обозначение POWER_FF для сохранения единства терминологии, однако в данном случае сигнал не является в буквальном смысле сигналом положительной обратной связи по мощности.) Предполагаемый сигнал IDC_NET' используется для указания эффективного значения постоянного тока, который передается мостом 14 сети в сеть питания, но вычисляется по условиям работы моста 10 генератора.
В результате деления сигнала POWER FF мощности генератора на сигнал VDC_FB обратной связи по напряжению определяется эффективное значение постоянного тока, передаваемого в звено 12 ПТ из моста 10 генератора.
Измерение тока зарядки (или разрядки) конденсатора 82 большой емкости в звене 12 ПТ осуществляется с использованием конденсатора 78 небольшой емкости, включенного параллельно конденсатору 82, путем измерения тока, протекающего через конденсатор 78 с помощью датчика 80 тока, и пересчета измеренного тока с помощью коэффициента, определяемого отношением емкости конденсатора 78 и полной емкости звена 12 ПТ. Знак сигнала I_САР тока положительный, когда конденсатор 82 большой емкости заряжается, и отрицательный - при его разряде. Поскольку ток, протекающий через конденсатор 82, изменяется во времени, то необходимо интегрировать ток по всему периоду широтно-импульсной модуляции.
Предполагаемый сигнал IDC_NET' прибавляется в блоке суммирования, показанном на фигуре 12, к выходному сигналу регулятора 76 напряжения на звене ПТ.
В случае провала напряжения в сети питания в первый момент мост 10 генератора не имеет никакой информации о том, что мост 14 сети больше не может экспортировать энергию в сеть питания на прежнем уровне. Избыточный ток, представляющий собой разность между током, поступающим из генератора 4, и током, отдаваемым в сеть питания, заряжает конденсатор 82 большой емкости и может быть зафиксирован как увеличенный сигнал о токе зарядки конденсатора 82, полученный из сигнала I_САР тока. Затем сигнал IDC_NET' пересчитывается и используется для пересчета сигнала, прибавляемого к выходному сигналу регулятора 76 напряжения на звене ПТ, в результате чего будет изменяться фактическая энергия, которая импортируется из генератора 4 при провале напряжения в сети питания.
В тех случаях, когда большие емкости звена ПТ моста 10 генератора и моста 14 сети находятся на достаточно большом расстоянии друг от друга, между мостами может возникать индуктивность, которая приводит к возникновению резонанса между двумя развязанными конденсаторами большой емкости. В этом случае конденсатор 78 небольшой емкости может быть заменен цепью из двух конденсаторов и одной катушки индуктивности, которые выбираются таким образом, чтобы получить такую же резонансную частоту, что и в случае комбинации развязанных конденсаторов большой емкости и индуктивности между мостами. В этом случае ток измеряется по току, протекающему в обоих конденсаторах небольшой емкости, так что резонанс между ними исключается процессом измерения.
Управление мощностью для моста 14 сети описывается ниже более подробно со ссылками на фигуру 13.
IQ_CAPACITY - это сигнал, который относится к номинальным параметрам и преобладающему напряжению VQ_NET сети. Ясно, что мост 10 генератора и контроллер 18 моста генератора вместе имеют конечное время отклика на изменения условий работы. Для того чтобы это учесть, в контроллере 46 моста сети к сигналу IQ_CAPACITY применяется ограничение по скорости нарастания для получения ограниченного сигнала IQ_NET*_LIM регулирования тока по поперечной оси, который используется только в случаях провалов напряжения в сети питания. Ограничение по скорости нарастания регулируется таким образом, чтобы ограниченный сигнал IQ_NET*_LIM регулирования тока по поперечной оси уменьшался с той же скоростью, с какой снижается мощность на мосту 10 генератора. Ограничение по скорости нарастания будет правильно отрегулировано, когда резкое отклонение напряжения на звене ПТ, происходящее при провале напряжения в сети питания, минимизируется.
Переключатель 84 включает выход функции ограничения по скорости нарастания, когда DIP_DETECT=1 (то есть, когда провал напряжения в сети питания обнаружен ограничителем 86 относительно конкретных характеристик напряжения сети и параметров контроллера 46 моста сети питания). В противном случае, в нормальном рабочем режиме, когда DIP_DETECT=0, сигнал IQ_NET* регулирования тока по поперечной оси определяется по преобладающему напряжению VQ_NET сети и по конечному значению POWER_LIMIT мощности, вычисленному с учетом параметров возбуждения, как показано на фигуре 13. Сигнал IQ_NET* регулирования тока по поперечной оси ограничивается функцией фиксации уровня, определяемой командным сигналом Р* регулирования экспорта энергии и преобладающим напряжением VQ_NET сети. Когда DIP_DETECT=0, выход функции фиксации уровня подается в регулятор 58 тока в качестве командного сигнала IQ_NET*_LIM регулирования тока по поперечной оси.
Ограничитель 86 выдает ограниченный командный сигнал ID_NET*_LIM регулирования тока по продольной оси в регулятор 58 тока при провале напряжения в сети питания. В нормальном рабочем режиме командный сигнал ID_NET* регулирования тока по продольной оси подается непосредственно в регулятор 58 тока в качестве ограниченного командного сигнала ID_NЕТ*_LIM регулирования тока по продольной оси.
Второй вариант управления звеном ПТ для моста 10 генератора во втором альтернативном варианте силового преобразователя рассматривается ниже со ссылками на фигуры 11 и 14.
Если, например, силовой преобразователь работает на полной мощности, то интегральная составляющая регулирования ПИ-регулятора 20 регулятора 76 напряжения на звене ПТ будет иметь достаточно большой. Если какие-либо другие элементы управления отсутствуют, то при провале напряжения в сети питания должна возникать ошибка напряжения на звене ПТ, обнуляющая или сбрасывающая эту интегральную составляющую. Указанная ошибка напряжения на звене ПТ будет положительным напряжением переходного процесса с возможностью отключения звена ПТ по перенапряжению, возникающему из-за ограничений оборудования по напряжению.
При провале напряжения в сети питания скорость изменения сигнала VDC_FB обратной связи по напряжению, определяемого напряжением на звене ПТ (как представлено выражением dVDC_FB/dt), существенно выше скорости изменения в нормальном режиме работы силового преобразователя. Если dVDC_FB/dt превышает пороговое значение, то можно заключить, что что-то влияет на способность моста 14 сети экспортировать энергию и что, возможно, упало напряжение сети.
Второй вариант управления звеном ПТ, представленный на фигуре 14, базируется на том обстоятельстве, что если сигнал VDC_FB обратной связи по напряжению превышает первое пороговое значение (VDC_FB_THRESHOLD), и dVDC_FB/dt превышает второе пороговое значение (dVDC_FB/dt_THRESHOLD), то интегральная составляющая в ПИ-регуляторе 20 умножается на величину, меньшую 1, определяемую параметрами контроллера 18 моста генератора.
Если указанные пороговые значения по-прежнему превышаются, то такое же управляющее воздействие звена ПТ будет применено к последовательным сканированиям широтно-импульсной модуляции (такое сканирование представляет одну итерацию программы управления), так что интегральная составляющая в ПИ-регуляторе 20 будет последовательно снижаться.
Два пороговых значения определяются на основе известных характеристик ветряной турбины, ожидаемого максимального значения dVDC_FB/dt в нормальном режиме работы и ожидаемого значения dVDC_FB/dt в случае нарушения работы сети. Ожидаемое максимальное значение dVDC_FB/dt в нормальном режиме работы может быть рассчитано по известному значению емкости звена ПТ и параметрам возбуждения.
Работа альтернативного варианта силового преобразователя
Один из возможных вариантов осуществления альтернативной схемы силового преобразователя представлен на фигурах 11-14. При запуске напряжение на звене ПТ устанавливается подходящими цепями предварительной зарядки (не показаны) от трансформатора 6, показанного на фигуре 11. При этом силовые полупроводниковые вентили в схеме моста 14 сети выключены.
Командный сигнал VDC_GEN* регулирования напряжения на звене ПТ, подаваемый на контроллер 18 регулирования мощности моста генератора, устанавливается на 1100 вольт.
Предполагая, что ветер дует и ветряная турбина 2 вращается, когда мост 10 генератора включен, он будет управлять током ID_GEN по продольной оси для получения величины магнитного потока в генераторе 4, необходимой для преобладающих значений скоростей, и ток IQ_GEN по поперечной оси регулируется под управлением моста 10 генератора для получения на звене ПТ напряжения 1100 вольт.
Командный сигнал Р* управления экспортом энергии устанавливается на нуль, и выходной сигнал регулятора 88 (более конкретно ПИ-регулятора 44) напряжения сети турбины фиксируется на нуле. При этом силовые полупроводниковые вентили в схеме моста 14 сети включены.
В нормальном режиме работы, когда напряжение сети питания, измеряемое на клеммах переменного тока моста 14 сети, находится в пределах значений нормального режима, выполняется следующее управляющее воздействие. Сигнал N датчика скорости фильтруется для получения первого отфильтрованного сигнала N' и второго отфильтрованного сигнала N'2. Коэффициент KD усиления демпфирования, применяемый ко второму отфильтрованному сигналу N'2 скорости, обеспечивает демпфирование резонансных колебаний вала в приводном механизме турбины. Первый отфильтрованный сигнал N' скорости используется в качестве входного параметра таблицы 56, содержащей предварительно рассчитанные значения Р* в зависимости от N'. Командный сигнал Р* регулирования экспорта энергии, получаемый из таблицы 56, подается в контроллер 46 регулирования мощности моста 14 сети. Полученный командный сигнал Р* регулирования экспорта энергии делится на преобладающее напряжение VQ_NET сети по поперечной оси для получения сигнала ограничения. Этот сигнал ограничения применяется с помощью блока фиксации уровня к командному сигналу IQ_NET* регулирования тока по поперечной оси для формирования командного сигнала IQ_NET*_LIM регулирования тока по поперечной оси.
В этом режиме работы величина командного сигнала IQ_NET* регулирования тока по поперечной оси устанавливается превышающей максимальную величину, которая может быть получена из командного сигнала Р* регулирования экспорта энергии, так что вышеописанная функция демпфирования остается включенной.
При провале напряжения сети задание номинальной выходной мощности (VA) для активной и реактивной составляющих контроллера 46 моста сети будет определяться в соответствии с требованиями конкретного кода сети, для которого установлены параметры ветряной турбины.
Практическая реализация схемы силового преобразователя
Схема силового преобразователя может быть осуществлена следующим образом. Мост 10 генератора и мост 14 сети могут быть реализованы на модуле инвертора MV3000 серии DELTA с жидкостным охлаждением, который имеет подходящую номинальную мощность. Он представляет собой инвертор источника напряжения на транзисторах IGBT, подходящий для работы на сеть 690 вольт, перем., с напряжением на звене ПТ порядка 1100 вольт. Контроллер 18 моста генератора и контроллер 46 моста сети могут быть реализованы на контроллерах MV3000 DELTA. Это электронный микропроцессорный контроллер, фирменное программное обеспечение для которого включает все функции, необходимые для реализации вышеописанных схем управления энергией. Микропроцессор работает с фиксированным временным окном, которое иногда указывается как "время сканирования" в отношении частоты широтно-импульсной модуляции контроллера. Все указанные продукты поставляются компанией Converteam Ltd, находящейся по адресу Boughton Road, Rugby, Warwickshire, CV21 1BU.
Возможные модификации схемы силового преобразователя
Предложенные в изобретении силовые преобразователи, описание которых приведено выше, могут быть устроены примерно одинаково, если асинхронный генератор 4 заменить синхронным генератором с постоянными магнитами или с обмоткой возбуждения. При использовании синхронного генератора с обмоткой возбуждения обычно будет использоваться дополнительный вход возбуждения поля генератора для обеспечения основного магнитного потока в условиях установки нулевого значения командного сигнала регулирования тока статора по продольной оси. Для случаев применения, связанных с высокой динамикой и/или ослаблением поля, может быть установлено ненулевое значение командного сигнала регулирования тока статора по продольной оси для более динамичного регулирования потока в генераторе. Как правило, используется трехфазный генератор, хотя могут использоваться генераторы и с другим количеством фаз. Силовой преобразователь также может быть устроен таким образом, чтобы он работал с многоуровневыми инверторами вместо двухуровневого инвертора, описанного выше.
В вышеописанной схеме предлагаются два независимых контроллера, работа которых координируется управляющими сигналами, передаваемыми из контроллера 18 моста генератора в контроллер 46 моста сети и наоборот. В равной степени возможна интеграция всех функций контроллеров физически в одном контроллере. Аналогично, функции могут быть распределены между более чем двумя контроллерами, если это удобно по соображениям практической реализации силового преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ МОЩНОСТИ И СИСТЕМА ТЕПЛОВОГО НАСОСА, СНАБЖЕННАЯ ИМ | 2021 |
|
RU2817330C1 |
| СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2008 |
|
RU2484574C2 |
| ИСТОЧНИК БЕСПЕРЕБОЙНОГО ПИТАНИЯ ПОТРЕБИТЕЛЕЙ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2426215C2 |
| Ветряная электростанция | 2022 |
|
RU2785256C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ И СТАБИЛИЗАТОР НАПРЯЖЕНИЯ ИСТОЧНИКА БЕСПЕРЕБОЙНОГО ПИТАНИЯ | 2009 |
|
RU2498487C2 |
| РЕГУЛЯТОР МОЩНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ РЕГУЛЯТОРОМ МОЩНОСТИ | 2007 |
|
RU2381610C1 |
| ИСТОЧНИК БЕСПЕРЕБОЙНОГО ПИТАНИЯ - СТАТИЧЕСКИЙ ОБРАТИМЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПИТАНИЯ ПОТРЕБИТЕЛЕЙ ПЕРЕМЕННОГО И ПОСТОЯННОГО ТОКА И ЗАРЯДА (ПОДЗАРЯДА) АККУМУЛЯТОРНОЙ БАТАРЕИ | 2019 |
|
RU2732280C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2543502C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2619919C1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ И СИСТЕМОЙ ОТБОРА МОЩНОСТИ | 2020 |
|
RU2726814C1 |

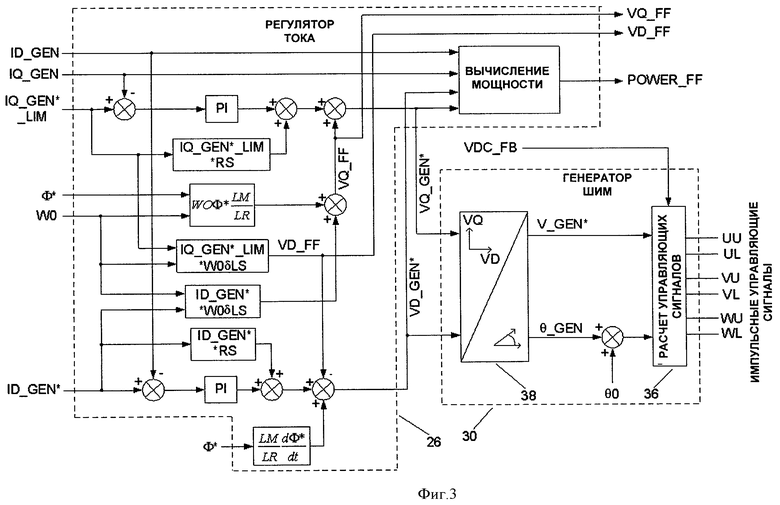


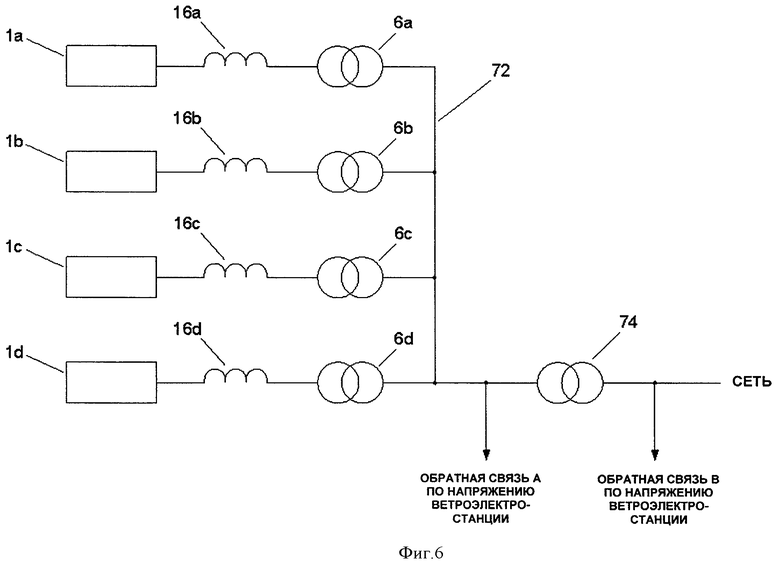



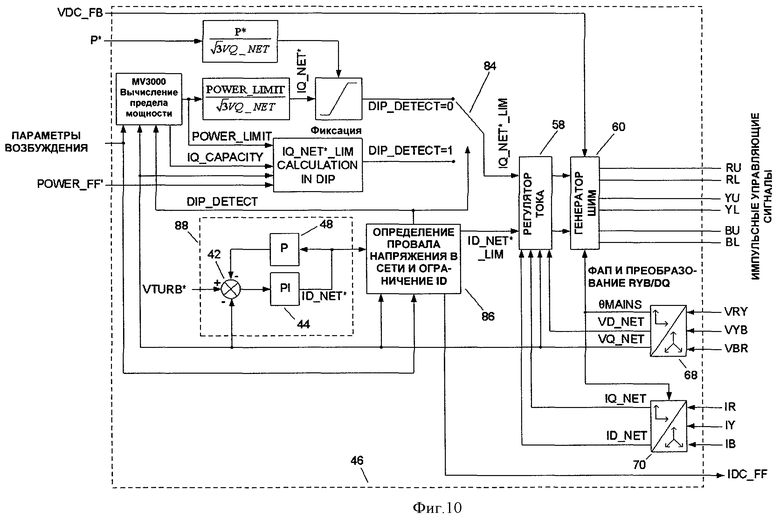
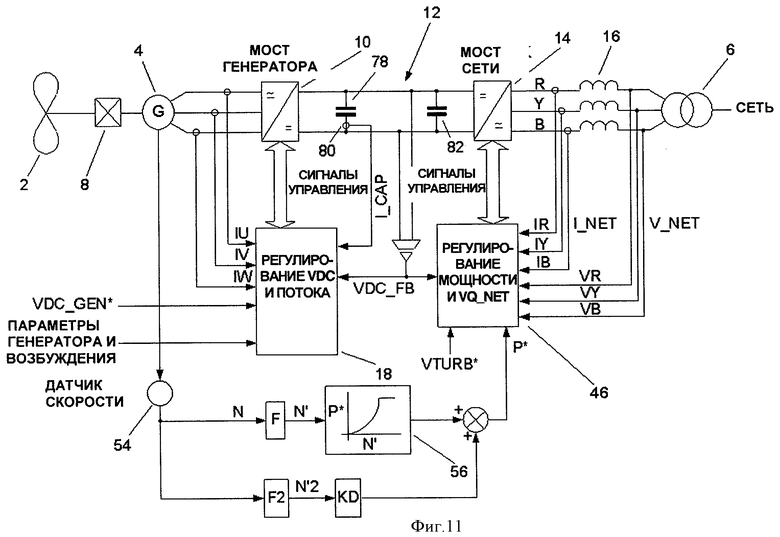



В настоящем изобретении предлагается силовой преобразователь, который может использоваться для сопряжения генератора (4), вырабатывающего регулируемое напряжение с регулируемой частотой, с сетью питания, которая должна обеспечивать номинальное фиксированное напряжения с номинальной фиксированной частотой, причем силовой преобразователь имеет ряд особенностей, которые позволяют сохранять его подключение к сети питания и обеспечивать непрерывное управление при нарушениях работы сети и в условиях переходных процессов. Силовой преобразователь содержит мост (10) генератора, электрически соединенный со статором генератора (4), и мост (14) сети. Между мостом (10) генератора и мостом (14) сети включено звено (12) ПТ. Между мостом (14) сети и сетью питания включен фильтр (16), снабженный сетевыми клеммами. Для управления работой силовых полупроводниковых вентилей моста (10) генератора предусмотрен первый контроллер (18). Аналогично, для управления работой силовых полупроводниковых вентилей моста (14) сети предусмотрен второй контроллер (46). В первом контроллере (18) используется командный сигнал (VDC GEN*) регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, для управления силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора (10) для получения необходимого уровня напряжения на звене ПТ, которое соответствует командному сигналу (VDC GEN*) регулирования напряжения на звене ПТ. Во втором контроллере (46) используется командный сигнал (Р*) регулирования мощности, определяемый уровнем мощности, которая должна передаваться из звена (12) ПТ в сеть питания через второй активный выпрямитель/инвертор (14), и командный сигнал (VTURB*) регулирования напряжения, определяемый напряжением, которое должно быть получено на сетевых клеммах фильтра (16), для управления силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора (14) для достижения необходимых уровней мощности и напряжения, которые соответствуют командным сигналам регулирования мощности и напряжения (Р* и VTURB*). Технический результат - обеспечение управляемости во всех режимах. 7 н. и 63 з.п. ф-лы, 14 ил.
1. Силовой преобразователь, который может использоваться для сопряжения генератора (4), вырабатывающего регулируемое напряжение с регулируемой частотой, с сетью питания, которая должна обеспечивать номинальное фиксированное напряжение с номинальной фиксированной частотой, содержащий первый активный выпрямитель/инвертор (10), электрически соединенный со статором генератора (4) и содержащий силовые полупроводниковые вентили; второй активный выпрямитель/инвертор (14), содержащий силовые полупроводниковые вентили; звено (12) ПТ, включенное между первым активным выпрямителем/инвертором (10) и вторым активным выпрямителем/инвертором (14); фильтр (16), подключенный между вторым активным выпрямителем/инвертором (14) и сетью питания, причем фильтр (16) содержит сетевые клеммы, первый контроллер (18) для первого активного выпрямителя/инвертора (10), и второй контроллер (46) для второго активного выпрямителя/инвертора (14), причем в первом контроллере (18) используется командный сигнал (VDC GEN*) регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, для управления силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора (10) для достижения необходимого уровня напряжения на звене ПТ, которое соответствует командному сигналу (VDC GEN*) регулирования напряжения на звене ПТ;
во втором контроллере (46) используется командный сигнал (Р*) регулирования мощности, определяемый уровнем мощности, которая должна передаваться из звена (12) ПТ в сеть питания через второй активный выпрямитель/инвертор (14), и командный сигнал (VTURB*) регулирования напряжения, определяемый напряжением, которое должно быть получено на сетевых клеммах фильтра (16), для управления силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора (14) для достижения необходимых уровней мощности и напряжения, которые соответствуют командным сигналам регулирования мощности и напряжения (Р* и VTURB*).
2. Силовой преобразователь по п.1, в котором в первом контроллере (18) используется командный сигнал (Ф*) регулирования магнитного потока, определяемый необходимым уровнем магнитного потока, который должен быть получен в генераторе (4), осуществляется преобразование командного сигнала (Ф*) регулирования магнитного потока в командный сигнал (ID GEN*) регулирования тока по продольной оси для первого активного выпрямителя/инвертора (10) и управление силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора (10) для получения электрических параметров статора, которые позволяют получить необходимый ток по продольной оси для первого активного выпрямителя/инвертора (10).
3. Силовой преобразователь по п.1, в котором в первом контроллере (18) осуществляется преобразование командного сигнала (Ф*) регулирования магнитного потока в командный сигнал (ID GEN*) регулирования тока по продольной оси с учетом одной или нескольких характеристик (32) генератора.
4. Силовой преобразователь по любому из предыдущих пунктов, в котором в первом контроллере (18) осуществляется сравнение командного сигнала (VDC GEN*) регулирования напряжения на звене ПТ, определяемого необходимым уровнем напряжения на звене ПТ, с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для получения командного сигнала (IQ GEN*) регулирования тока по поперечной оси для первого активного выпрямителя/инвертора (10) и управление силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора (10) для получения электрических параметров статора, которые позволяют получить необходимый ток по поперечной оси для первого активного выпрямителя/инвертора (10).
5. Силовой преобразователь по п.4, в котором из второго контроллера (46) выдается управляющий сигнал (IDC LIM), изменяющийся в соответствии с преобладающими характеристиками напряжения в сети питания, в первый контроллер (18), и в первом контроллере (18) осуществляется сравнение командного сигнала (VDC GEN*) регулирования напряжения на звене ПТ, определяемого необходимым уровнем напряжения на звене ПТ, с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для определения командного сигнала (IDC GEN*) регулирования тока звена ПТ, ограничение командного сигнала (IDC GEN*) регулирования тока звена ПТ с использованием управляющего сигнала (IDC LIM), поступающего из второго контроллера (46), для получения ограниченного командного сигнала (IDC GEN* LIM) регулирования тока звена ПТ и использование ограниченного командного сигнала (IDC GEN* LIM) регулирования тока звена ПТ для определения командного сигнала (IQ GEN*) регулирования тока по поперечной оси для первого активного выпрямителя/инвертора (10).
6. Силовой преобразователь по п.4, в котором из второго контроллера (46) выдается управляющий сигнал (IDC FF), изменяющийся в соответствии с преобладающими характеристиками напряжения в сети питания, и/или командный сигнал (Р*) регулирования мощности в первый контроллер (18), и в котором в регуляторе (76) напряжения на звене ПТ первого контроллера (18) осуществляется сравнение командного сигнала (VDC GEN*) регулирования напряжения на звене ПТ, определяемого необходимым уровнем напряжения на звене ПТ, с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для обеспечения выходного сигнала, который прибавляется к управляющему сигналу (IDC FF) для получения командного сигнала (IDC GEN*) регулирования тока звена ПТ, используемого для получения командного сигнала (IQ GEN*) регулирования тока по поперечной оси для первого активного выпрямителя/инвертора (10).
7. Силовой преобразователь по п.4, в котором во втором контроллере (46) осуществляется преобразование командного сигнала (Р*) регулирования мощности, определяемого уровнем мощности, которая должна передаваться из звена (12) ПТ в сеть питания через второй активный выпрямитель/инвертор (14), в командный сигнал (IQ NET* LIM) регулирования тока по поперечной оси для второго активного выпрямителя/инвертора (14) и управление силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора (14) для получения электрических параметров фильтра/сети питания, которые позволяют получить необходимый ток по поперечной оси для второго активного выпрямителя/инвертора (14).
8. Силовой преобразователь по п.7, в котором командный сигнал (Р*) регулирования мощности преобразуется в командный сигнал (IQ NET* LIM) регулирования тока по поперечной оси путем деления командного сигнала (Р*) регулирования мощности на сигнал (VQ NET), который определяется по напряжению на сетевых клеммах фильтра (16).
9. Силовой преобразователь по п.7, в котором командный сигнал (Р*) регулирования мощности преобразуется в командный сигнал (IQ NET* LIM) регулирования тока по поперечной оси путем деления командного сигнала (Р*) регулирования мощности на сигнал, полученный фильтрацией сигнала, который определяется по напряжению на сетевых клеммах фильтра (16).
10. Силовой преобразователь по любому из пп.7-9, в котором во втором контроллере (46) используется дополнительный командный сигнал (VDC NET*) регулирования напряжения на звене ПТ, определяемый необходимым напряжением на звене ПТ, осуществляется сравнение дополнительного командного сигнала (VDC NET*) регулирования напряжения на звене ПТ с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для определения командного сигнала (VDC PI IQ NET*) регулирования тока по поперечной оси без ограничения и ограничение командного сигнала (VDC PI IQ NET*) регулирования тока по поперечной оси без ограничения до величины, определяемой сигналом (52) ограничения, который определяется по командному сигналу (Р*) регулирования мощности, для определения командного сигнала (IQ NET* LIM*) регулирования тока по поперечной оси для второго активного выпрямителя/инвертора (14).
11. Силовой преобразователь по п.10, в котором командный сигнал (VDC PI IQ NET*) регулирования тока по поперечной оси без ограничения прибавляют к сигналу (IQ FF) обратной положительной связи по току по поперечной оси, который определяют на основании (i) сигнала (POWER FF), определяемого мощностью генератора, (ii) сигнала (VQ NET) обратной связи по напряжению, измеренного на сетевых клеммах фильтра (16), и (iii) сигнала (PFF GAIN) усиления, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания.
12. Силовой преобразователь по п.11, в котором сигнал (POWER FF), определяемый мощностью генератора, подается во второй контроллер (46) из первого контроллера (18).
13. Силовой преобразователь по п.11, в котором сигнал (POWER FF), определяемый мощностью генератора, из которого вычитается выходной сигнал ПИ-регулятора (20) регулятора (76) напряжения на звене ПТ первого контроллера (18), подается во второй контроллер (46) и используется вторым контроллером (46) только при провале напряжения в сети питания.
14. Силовой преобразователь по п.10, в котором во втором контроллере (46) осуществляется изменение сигнала ограничения, который определяется по командному сигналу (Р*) регулирования мощности, в соответствии с преобладающими характеристиками напряжения в сети питания.
15. Силовой преобразователь по п.1, в котором звено (12) ПТ содержит конденсатор (82), и силовой преобразователь содержит дополнительно датчик (80) тока для измерения тока, протекающего через конденсатор (82), и выдачи выходного сигнала.
16. Силовой преобразователь по п.15, в котором выходной сигнал датчика (80) тока вычитается из сигнала, полученного из сигнала (POWER FF), определяемого мощностью генератора, для получения сигнала (IDC NET), который прибавляется к выходному сигналу регулятора (76) напряжения на звене ПТ первого контроллера (18) для получения командного сигнала (ID GEN*) регулирования тока звена ПТ для первого активного выпрямителя/инвертора (10).
17. Силовой преобразователь по п.15, в котором выходной сигнал датчика (80) тока вычитается из сигнала, полученного из сигнала (POWER FF), определяемого мощностью генератора, для получения сигнала (IDC NET), который фильтруется и прибавляется к выходному сигналу регулятора (76) напряжения на звене ПТ первого контроллера (18) для получения командного сигнала (ID GEN*) регулирования тока звена ПТ для первого активного выпрямителя/инвертора (10).
18. Силовой преобразователь по п.1, содержащий дополнительно датчик напряжения, предназначенный для измерения напряжения на звене ПТ и выдачи сигнала (VDC FB) обратной связи по напряжению на звене ПТ, и устройство измерения скорости изменения сигнала (VDC FB) обратной связи по напряжению на звене ПТ, причем интегральная составляющая ПИ-регулятора (20) регулятора (76) напряжения на звене ПТ первого контроллера (18) пересчитывается с использованием заданного коэффициента, когда сигнал (VDC FB) обратной связи по напряжению на звене ПТ превышает первое пороговое значение (VDC FB THRESHOLD), и скорость изменения сигнала (VDC FB) обратной связи по напряжению на звене ПТ превышает второе пороговое значение (dVDC FB/dt THRESHOLD).
19. Силовой преобразователь по п.1, в котором при провале напряжения командный сигнал (IQ NET* LIM) регулирования тока по поперечной оси для второго активного выпрямителя/инвертора (14) определяется по сигналу (IQ CAPACITY), ограниченному по скорости нарастания, полученному по номинальному пределу мощности второго активного выпрямителя/инвертора (14), который изменяется в зависимости от преобладающих характеристик напряжения в сети питания.
20. Силовой преобразователь по п.1, в котором во втором контроллере (46) осуществляется сравнение командного сигнала (VTURB*) регулирования напряжения, определяемого напряжением, которое должно быть получено на сетевых клеммах фильтра (16), с сигналом (VQ NET) обратной связи по напряжению, измеренным на сетевых клеммах фильтра (16), для определения командного сигнала (ID NET*) регулирования тока по продольной оси для второго активного выпрямителя/инвертора (14) и управление силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора (14) для определения электрических параметров фильтра/сети питания, которые позволяют получить необходимый ток по продольной оси для второго активного выпрямителя/инвертора (14).
21. Силовой преобразователь по п.20, в котором во втором контроллере (46) осуществляется изменение командного сигнала (ID NET*) регулирования тока по продольной оси в соответствии с преобладающими характеристиками напряжения в сети питания.
22. Силовой преобразователь по п.20 или 21, в котором во втором контроллере (46) осуществляется изменение сигнала ошибки, определяемой разностью между командным сигналом (VTURB*) регулирования напряжения, определяемым уровнем напряжения, который должен быть получен на сетевых клеммах фильтра (16), и сигналом (VQ NET) обратной связи по напряжению, измеренному на сетевых клеммах фильтра (16), в соответствии с сигналом, полученным из командного сигнала (ID NET*) регулирования тока по продольной оси.
23. Силовой преобразователь по п.1, содержащий дополнительно датчик (54) скорости или определитель скорости для получения сигнала (N) скорости, определяемого скоростью движущейся части генератора (4), причем сигнал (N) скорости используется для получения командного сигнала (Р*) регулирования мощности.
24. Силовой преобразователь по п.23, в котором командный сигнал (Р*) регулирования мощности определяется по таблице (56) или с использованием математической функции, и сигнал (N) скорости является входным параметром для таблицы (56) или входной переменной, по которой вычисляется математическая функция.
25. Силовой преобразователь по п.23, в котором сигнал (N) скорости изменяется с использованием фильтр-функции.
26. Силовой преобразователь по п.25, в котором командный сигнал (Р*) регулирования мощности определяется по таблице (56) или с использованием математической функции, и измененный сигнал (N') скорости является входным параметром для таблицы (56) или входной переменной, по которой вычисляется математическая функция.
27. Силовой преобразователь по пп.23-26, в котором командный сигнал (Р*) регулирования мощности суммируется с сигналом, полученным в результате фильтрации сигнала (N) скорости.
28. Система силовых преобразователей, содержащая несколько силовых преобразователей (1a-1d) по любому из пп.1-27, подключенных параллельно к сети питания, обеспечивающей номинальное фиксированное напряжение и номинальную фиксированную частоту, в точке (72) параллельного подключения, причем командный сигнал (VTURB*) регулирования напряжения, определяемый напряжением, которое должно быть получено на сетевых клеммах фильтра (16) каждого силового преобразователя, определяется сравнением командного сигнала верхнего уровня регулирования напряжения и сигнала верхнего уровня обратной связи по напряжению, которое измеряется в точке (72) параллельного подключения преобразователей к сети питания.
29. Система по п.28, в которой каждый отдельный силовой преобразователь (1a-1d) содержит повышающий трансформатор (6a-6d), включенный электрически между соответствующим фильтром (16a-16d) и точкой (72) параллельного подключения.
30. Система по п.28 или 29, содержащая дополнительно повышающий трансформатор (74), включенный электрически между точкой (72) параллельного подключения и сетью питания.
31. Система по п.30, в которой сигнал верхнего уровня обратной связи по напряжению измеряется на стороне сети питания повышающего трансформатора (74), включенного электрически между точкой (72) параллельного подключения и сетью питания.
32. Система по п.30, в которой сигнал (ОБРАТНАЯ СВЯЗЬ ПО НАПРЯЖЕНИЮ ВЕТРОЭЛЕКТРОСТАНЦИИ) верхнего уровня обратной связи по напряжению измеряется на стороне параллельного подключения повышающего трансформатора (74), включенного электрически между точкой (72) параллельного подключения и сетью питания.
33. Ветряная турбина, содержащая генератор (4), содержащий статор и ротор, блок (2) турбины, содержащей по меньшей мере одну лопасть для вращения ротора генератора (4), и силовой преобразователь по любому из пп.1-27.
34. Ветроэлектростанция, содержащая сеть питания, обеспечивающую номинальное фиксированное напряжение и номинальную фиксированную частоту, и несколько ветряных турбин по п.33, причем соответствующие силовые преобразователи (1a-1d) ветряных турбин подключены параллельно к сети питания в точке (72) параллельного подключения, командный сигнал (VTURB*) регулирования напряжения, определяемый напряжением, которое должно быть получено на сетевых клеммах фильтра (16) каждого силового преобразователя (1a-1d), определяется сравнением командного сигнала верхнего уровня регулирования напряжения и сигнала верхнего уровня обратной связи по напряжению, которое измеряется в точке (72) параллельного подключения преобразователей к сети питания.
35. Ветроэлектростанция по п.34, в которой каждый отдельный силовой преобразователь (1a-1d) содержит повышающий трансформатор (6a-6d), включенный электрически между соответствующим фильтром (16a-16d) и точкой (72) параллельного подключения.
36. Ветроэлектростанция по п.34 или 35, содержащая дополнительно повышающий трансформатор (74), включенный электрически между точкой (72) параллельного подключения и сетью (СЕТЬ) питания.
37. Ветроэлектростанция по п.36, в которой сигнал верхнего уровня обратной связи по напряжению измеряется на стороне сети питания повышающего трансформатора (74), включенного электрически между точкой (72) параллельного подключения и сетью питания.
38. Ветроэлектростанция по п.36, в которой сигнал верхнего уровня обратной связи по напряжению измеряется на стороне параллельного подключения повышающего трансформатора (74), включенного электрически между точкой (72) параллельного подключения и сетью питания.
39. Способ осуществления работы силового преобразователя, который может использоваться для сопряжения генератора (4), вырабатывающего регулируемое напряжение с регулируемой частотой, с сетью питания, которая должна обеспечивать номинальное фиксированное напряжение и номинальную фиксированную частоту, причем силовой преобразователь содержит
первый активный выпрямитель/инвертор (10), электрически соединенный со статором генератора (4) и содержащий силовые полупроводниковые вентили; второй активный выпрямитель/инвертор (14), содержащий силовые полупроводниковые вентили; звено (12) ПТ, включенное между первым активным выпрямителем/инвертором (10) и вторым активным выпрямителем/инвертором (14); фильтр (16), подключенный между вторым активным выпрямителем/инвертором (14) и сетью питания, причем фильтр (16) содержит сетевые клеммы; первый контроллер (18) для первого активного выпрямителя/инвертора (10) и второй контроллер (46) для второго активного выпрямителя/инвертора (14), при этом способ содержит следующие стадии: использование первым контроллером (18) командного сигнала (VDC GEN*) регулирования напряжения на звене ПТ, определяемого необходимым напряжением на звене ПТ, для управления силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора (10) для достижения необходимого уровня напряжения на звене ПТ, которое соответствует командному сигналу (VDC GEN*) регулирования напряжения на звене ПТ, и
использование вторым контроллером (46) командного сигнала (Р*) регулирования мощности, определяемого уровнем мощности, которая должна передаваться из звена (12) ПТ в сеть питания через второй активный выпрямитель/инвертор (14), и командного сигнала (VTURB*) регулирования напряжения, определяемого напряжением, которое должно быть получено на сетевых клеммах фильтра (16), для управления силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора (14) для достижения необходимых уровней мощности и напряжения, которые соответствуют командным сигналам регулирования мощности и напряжения (Р* и VTURB*).
40. Способ по п.39, содержащий дополнительно стадию использования вторым контроллером (46) измерения напряжения (VQ NET) в сети питания для определения пределов мощности, которая может экспортироваться из второго активного выпрямителя/инвертора (14), когда характеристики напряжения в сети питания отклоняются от их номинальных значений.
41. Способ по п.39 или 40, содержащий дополнительно стадию использования вторым контроллером (46) измерения напряжения (VQ NET) в сети питания для определения величины тока, которая должна обеспечиваться вторым активным выпрямителем/инвертором (14), когда характеристики напряжения в сети питания отклоняются от их номинальных значений.
42. Способ по п.39, содержащий дополнительно стадию использования первым контроллером (18) командного сигнала (Ф*) регулирования магнитного потока, определяемого необходимым уровнем магнитного потока, который должен быть получен в генераторе (4), преобразования командного сигнала (Ф*) регулирования магнитного потока в командный сигнал (ID GEN*) регулирования тока по продольной оси для первого активного выпрямителя/инвертора (10) и управления силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора (10) для получения электрических параметров статора, которые позволяют получить необходимый ток по продольной оси для первого активного выпрямителя/инвертора (10).
43. Способ по п.42, в котором стадия преобразования первым контроллером (18) командного сигнала (Ф*) регулирования магнитного потока в командный сигнал (ID GEN*) регулирования тока по продольной оси осуществляется с учетом одной или нескольких характеристик (21) генератора.
44. Способ по п.39, содержащий дополнительно стадию сравнения первым контроллером (18) командного сигнала (VDC GEN*) регулирования напряжения на звене ПТ, определяемого необходимым уровнем напряжения на звене ПТ, с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для определения командного сигнала (IQ GEN*) регулирования тока по поперечной оси для первого активного выпрямителя/инвертора (10) и управление силовыми полупроводниковыми вентилями первого активного выпрямителя/инвертора (10) для получения электрических параметров статора, которые позволяют получить необходимый ток по поперечной оси для первого активного выпрямителя/инвертора (10).
45. Способ по п.44, который дополнительно содержит следующие стадии: выдачу вторым контроллером (46) в первый контроллер (18) управляющего сигнала (IDC LIM), который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания, при провале напряжения в сети питания; и
сравнение в первом контроллере (18) командного сигнала (VDC GEN*) регулирования напряжения на звене ПТ, определяемого необходимым уровнем напряжения на звене ПТ, с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для определения командного сигнала (IDC GEN*) регулирования тока звена ПТ, ограничение командного сигнала (IDC GEN*) регулирования тока звена ПТ с использованием управляющего сигнала (IDC LIM), поступающего из второго контроллера (46), для получения ограниченного командного сигнала (IDC GEN* LIM) регулирования тока звена ПТ и использование ограниченного командного сигнала (IDC GEN* LIM) регулирования тока звена ПТ для получения командного сигнала (IQ GEN*) регулирования тока по поперечной оси для первого активного выпрямителя/инвертора (10) так, чтобы из сети питания не отбиралась энергия при провале напряжения в сети питания.
46. Способ по п.44, содержащий дополнительно стадии выдачи вторым контроллером (46) в первый контроллер (18) управляющего сигнала (IDC FF), который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания, и/или командного сигнала (Р*) регулирования мощности, и сравнения регулятором (76) напряжения на звене ПТ первого контроллера (18) командного сигнала (VDC GEN*) регулирования напряжения на звене ПТ, определяемого необходимым уровнем напряжения на звене ПТ, с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для обеспечения выходного сигнала, который прибавляется к управляющему сигналу (IDC FF) для получения командного сигнала (IDC GEN*) регулирования тока звена ПТ, который используется для получения командного сигнала (IQ GEN*) регулирования тока по поперечной оси для первого активного выпрямителя/инвертора (10).
47. Способ по любому из пп.44-46, содержащий дополнительно стадию преобразования вторым контроллером (46) командного сигнала (Р*) регулирования мощности, определяемого уровнем мощности, которая должна передаваться из звена (12) ПТ в сеть питания (СЕТЬ) через второй активный выпрямитель/инвертор (14), в командный сигнал (IQ NET* LIM) регулирования тока по поперечной оси для второго активного выпрямителя/инвертора (14) и управление силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора (14) для получения электрических параметров фильтра/сети питания, которые позволяют получить необходимый ток по поперечной оси для второго активного выпрямителя/инвертора (14).
48. Способ по п.47, в котором стадия преобразования сигнала (Р*) регулирования мощности в командный сигнал (IQ NET* LIM) регулирования тока по поперечной оси выполняется путем деления сигнала (Р*) регулирования мощности на сигнал (VQ NET), который определяется по напряжению на сетевых клеммах фильтра (16).
49. Способ по п.48, в котором стадия преобразования сигнала (Р*) регулирования мощности в командный сигнал (IQ NET* LIM) регулирования тока по поперечной оси выполняется путем деления сигнала (Р*) регулирования мощности на сигнал, полученный после фильтрации сигнала, который определяется по напряжению на сетевых клеммах фильтра (16).
50. Способ по п.47, содержащий дополнительно стадии использования во втором контроллере (46) дополнительного командного сигнала (VDC NET*) регулирования напряжения на звене ПТ, определяемого необходимым напряжением на звене ПТ, сравнения дополнительного командного сигнала (VDC NET*) регулирования напряжения на звене ПТ с сигналом (VDC FB) обратной связи по напряжению на звене ПТ для получения командного сигнала (VDC PI IQ NET*) регулирования тока по поперечной оси без ограничения и ограничения командного сигнала (VDC PI IQ NET*) регулирования тока по поперечной оси без ограничения до величины, определяемой сигналом (52) ограничения, который определяется по командному сигналу (Р*) регулирования мощности, для определения командного сигнала (IQ NET* LIM*) регулирования тока по поперечной оси для второго активного выпрямителя/инвертора (14) при запуске и при нормальном режиме работы силового преобразователя.
51. Способ по п.50, содержащий дополнительно стадию сложения командного сигнала (VDC PI IQ NET*) регулирования тока по поперечной оси без ограничения с сигналом (IQ FF) обратной положительной связи по току по поперечной оси, который определяют на основании (i) сигнала (POWER FF), определяемого мощностью генератора, (ii) сигнала (VQ NET) обратной связи по напряжению, измеренного на сетевых клеммах фильтра (16), и (iii) сигнала (PFF GAIN) усиления, который изменяется в соответствии с преобладающими характеристиками напряжения в сети питания.
52. Способ по п.51, в котором сигнал (POWER FF), определяемый мощностью генератора, выдается во второй контроллер (46) из первого контроллера (18).
53. Способ по п.51, в котором сигнал (POWER FF), определяемый мощностью генератора, из которого вычитается выходной сигнал ПИ-регулятора (20) регулятора (76) напряжения на звене ПТ первого контроллера (18), выдается во второй контроллер (46) и используется вторым контроллером (46) при провале напряжения в сети питания.
54. Способ по любому из пп.50-53, содержащий дополнительно стадию изменения вторым контроллером (46) сигнала ограничения, который определяется по командному сигналу (Р*) регулирования мощности в соответствии с преобладающими характеристиками напряжения в сети питания при провале напряжения в этой сети.
55. Способ по п.39, в котором звено (12) ПТ содержит конденсатор (82), и силовой преобразователь содержит дополнительно датчик (80) тока для измерения тока, протекающего через конденсатор (82), и выдачи выходного сигнала, причем способ содержит дополнительно стадии вычитания выходного сигнала датчика (80) тока из сигнала, полученного из сигнала (POWER FF), определяемого мощностью генератора, для получения сигнала (IDC NET), который прибавляется к выходному сигналу регулятора (76) напряжения на звене ПТ первого контроллера (18) для получения командного сигнала (ID GEN*) регулирования тока звена ПТ для первого активного выпрямителя/инвертора (10).
56. Способ по п.39, в котором звено (12) ПТ содержит конденсатор (82), и силовой преобразователь содержит дополнительно датчик (80) тока для измерения тока, протекающего через конденсатор (80), и выдачи выходного сигнала, причем способ содержит дополнительно стадии вычитания выходного сигнала датчика (80) тока из сигнала, полученного из сигнала (POWER FF), определяемого мощностью генератора, для получения сигнала (IDC NET), который фильтруется и прибавляется к выходному сигналу регулятора (76) напряжения на звене ПТ первого контроллера (18) для получения командного сигнала (ID GEN*) регулирования тока звена ПТ для первого активного выпрямителя/инвертора (10).
57. Способ по п.39, в котором силовой преобразователь содержит дополнительно датчик напряжения, предназначенный для измерения напряжения на звене ПТ и выдачи сигнала (VDC FB) обратной связи по напряжению на звене ПТ, и устройство измерения скорости изменения сигнала (VDC FB) обратной связи по напряжению на звене ПТ, причем способ содержит дополнительно пересчет интегральной составляющей ПИ-регулятора (20) регулятора (76) напряжения на звене ПТ первого контроллера (18) с использованием заданного коэффициента, когда сигнал (VDC FB) обратной связи по напряжению на звене ПТ превышает первое пороговое значение (VDC FB THRESHOLD), и скорость изменения сигнала (VDC FB) обратной связи по напряжению на звене ПТ превышает второе пороговое значение (dVDC FB/dt THRESHOLD).
58. Способ по п.39, содержащий дополнительно стадию определения командного сигнала (IQ NET* LIM) регулирования тока по поперечной оси для второго активного выпрямителя/инвертора (14) по сигналу (IQ CAPACITY), ограниченному по скорости нарастания, полученному по номинальному пределу мощности второго активного выпрямителя/инвертора (14), который пересчитывается в зависимости от преобладающих характеристик напряжения в сети питания при провале напряжения в этой сети.
59. Способ по п.39, содержащий дополнительно стадии сравнения вторым контроллером (46) командного сигнала (VTURB*) регулирования напряжения, определяемого уровнем напряжением, который должен быть получен на сетевых клеммах фильтра (16), с сигналом (VQ NET) обратной связи по напряжению, измеренным на сетевых клеммах фильтра (16), для определения командного сигнала (ID NET*) регулирования тока по продольной оси для второго активного выпрямителя/инвертора (14) и управления силовыми полупроводниковыми вентилями второго активного выпрямителя/инвертора (14) для получения электрических параметров фильтра/сети питания, которые позволяют получить необходимый ток по продольной оси для второго активного выпрямителя/инвертора (14).
60. Способ по п.58, содержащий дополнительно пересчет вторым контроллером (46) командного сигнала (ID NET*) регулирования тока по продольной оси в соответствии с преобладающими характеристиками напряжения в сети питания.
61. Способ по п.59 или п.60, содержащий дополнительно стадию пересчета вторым контроллером (46) сигнала ошибки, определяемой разностью между командным сигналом (VTURB*) регулирования напряжения, определяемым уровнем напряжения, который должен быть получен на сетевых клеммах фильтра (16), и сигналом (VQ NET) обратной связи по напряжению, измеренным на сетевых клеммах фильтра (16), в соответствии с сигналом, полученным из командного сигнала (ID NET*) регулирования тока по продольной оси.
62. Способ по п.39, содержащий дополнительно стадию получения сигнала (N) скорости, определяемого скоростью движущейся части генератора (4), и использования сигнала (N) скорости для получения командного сигнала (Р*) регулирования мощности.
63. Способ по п.61, содержащий дополнительно стадию определения командного сигнала (Р*) регулирования мощности по таблице (56) или с использованием математической функции, причем сигнал (N) скорости является входным параметром для таблицы (56) или входной переменной, по которой вычисляется математическая функция.
64. Способ по п.62, содержащий дополнительно стадию пересчета сигнала (N) скорости с использованием фильтр-функции.
65. Способ по п.64, содержащий дополнительно стадию определения командного сигнала (Р*) регулирования мощности по таблице (56) или с использованием математической функции, причем пересчитанный сигнал (N) скорости является входным параметром для таблицы (56) или входной переменной, по которой вычисляется математическая функция.
66. Способ по любому из пп.62-64, содержащий дополнительно стадию суммирования командного сигнала (Р*) регулирования мощности с сигналом, полученным в результате фильтрации сигнала скорости.
67. Способ осуществления работы несколько силовых преобразователей (1a-1d) по любому из пп.1-27, подключенных параллельно к сети питания, обеспечивающей номинальное фиксированное напряжение и номинальную фиксированную частоту, в точке (72) подключения, причем способ содержит стадию определения командного сигнала (VTURB*) регулирования напряжения, определяемого напряжением, которое должно быть получено на сетевых клеммах фильтра каждого силового преобразователя, путем сравнения командного сигнала верхнего уровня регулирования напряжения и сигнала верхнего уровня обратной связи по напряжению, которое измеряется в точке (72) параллельного подключения преобразователей к сети питания.
68. Способ по п.67, содержащий дополнительно стадию измерения сигнала верхнего уровня обратной связи по напряжению на стороне сети питания повышающего трансформатора (74), включенного электрически между точкой (72) параллельного подключения и сетью питания.
69. Способ по п.67, содержащий дополнительно стадию измерения сигнала (ОБРАТНАЯ СВЯЗЬ ПО НАПРЯЖЕНИЮ ВЕТРОЭЛЕКТРОСТАНЦИИ) верхнего уровня обратной связи по напряжению на стороне параллельного подключения преобразователей к повышающему трансформатору (74), включенному электрически между точкой (72) параллельного подключения и сетью (СЕТЬ) питания.
70. Способ управления работой ветряной турбины, содержащей генератор (4), вырабатывающий регулируемое напряжение с регулируемой частотой, который содержит статор и ротор, блок (2) турбины, содержащей по меньшей мере одну лопасть для вращения ротора генератора (4), и силовой преобразователь, который обеспечивает сопряжение генератора (4) с сетью питания, которая должна обеспечивать номинальное фиксированное напряжения и номинальную фиксированную частоту, причем силовой преобразователь содержит первый активный выпрямитель/инвертор (10), электрически соединенный со статором генератора (4) и содержащий силовые полупроводниковые вентили; второй активный выпрямитель/инвертор (14), содержащий силовые полупроводниковые вентили; звено (12) ПТ, включенное между первым активным выпрямителем/инвертором (10) и вторым активным выпрямителем/инвертором (14); фильтр (16), подключенный между вторым активным выпрямителем/инвертором (14) и сетью питания, причем фильтр (16) содержит сетевые клеммы; первый контроллер (18) для первого активного выпрямителя/инвертора (10); второй контроллер (46) для второго активного выпрямителя/инвертора (14), который использует сигнал регулирования мощности (Р*), указывающий уровень энергии, передаваемой со звена ПТ (12) на сеть питания через второй активный выпрямитель/инвертор (14), причем способ включает в себя следующие операции: при изменении скорости ветра увеличение командного сигнала (Р*), управляя таким образом вторым активным выпрямителем/инвертором (14) для увеличения уровня энергии, передаваемой из звена (12) ПТ, таким образом, что напряжение на звене ПТ уменьшается по сравнению с необходимым уровнем, или при уменьшении скорости ветра уменьшение командного сигнала (Р*), управляя таким образом вторым активным выпрямителем/инвертором (14) для уменьшения уровня энергии, передаваемой из звена (12) ПТ, так, чтобы напряжение на звене ПТ увеличивалось по сравнению с необходимым уровнем; управление первым активным выпрямителем/инвертором (10) для подачи достаточного тока в звено (12) через мост (10) генератора от генератора (4) для восстановления необходимого уровня напряжения на звене ПТ.
| US 5225712 A, 06.07.1993 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| АВТОНОМНАЯ СИСТЕМА БЕСПЕРЕБОЙНОГО ЭЛЕКТРОСНАБЖЕНИЯ, ИСПОЛЬЗУЮЩАЯ ВОЗОБНОВЛЯЕМЫЙ ИСТОЧНИК ЭНЕРГИИ | 2004 |
|
RU2262790C1 |

