ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству преобразования мощности, преобразующему входную мощность в заданную мощность путем коммутации.
УРОВЕНЬ ТЕХНИКИ
В некоторых устройствах преобразования мощности, включающих в себя схему преобразователя и схему инвертора, в звене постоянного тока (DC) имеется конденсатор с относительно небольшой емкостью для создания пульсации (колебания) в напряжении звена DC и обеспечивается пульсация тока нагрузки синхронно с напряжением звена DC, благодаря чему увеличивается ширина проводимости входного тока для повышения коэффициента мощности (См., например, ПАТЕНТНЫЕ ДОКУМЕНТЫ 1 и 2 и НЕПАТЕНТНЫЙ ДОКУМЕНТ 1).
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
ПАТЕНТНЫЙ ДОКУМЕНТ 1: Публикация патента Японии № 2002-51589.
ПАТЕНТНЫЙ ДОКУМЕНТ 2: Публикация патента Японии № 2005-130666.
НЕПАТЕНТНЫЙ ДОКУМЕНТ
НЕПАТЕНТНЫЙ ДОКУМЕНТ 1: Haga, Saito и Takahashi, CONTROL OF HIGH-POWER FACTOR ELECTROLYTIC CAPACITORLESS INVERTER OF SINGLE- PHASE DIODE RECTIFIER CIRCUIT (Хага, Саито и Такахаши, УПРАВЛЕНИЕ ЭЛЕКТРОЛИТИЧЕСКИМ БЕЗЪЕМКОСТНЫМ ИНВЕРТОРОМ С БОЛЬШИМ КОЭФФИЦИЕНТОМ МОЩНОСТИ ОДНОФАЗНОЙ ДИОДНОЙ СХЕМЫ ВЫПРЯМИТЕЛЯ), Институт инженеров Японии по электротехнике, доклады на общем собрании Н15-4-069 (Н15, март), стр. 99.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
Однако в вышеописанных примерах для создания большой пульсации тока ток двигателя, подключенного к нагрузке, снижается приблизительно до нуля. Таким образом, в приведенных примерах действующее значение тока двигателя может увеличиться со снижением коэффициента полезного действия двигателя.
Настоящее изобретение было сделано с учетом этой проблемы. Задачей настоящего изобретения является повышение коэффициента мощности и коэффициента полезного действия двигателя, подключенного в качестве нагрузки в устройстве преобразования мощности.
РЕШЕНИЕ ЗАДАЧИ
Для решения задачи в соответствии с первым аспектом изобретения устройство преобразования мощности включает в себя схему (2) преобразователя, выполненную с возможностью осуществления двухполупериодного выпрямления напряжения (vin) питания источника (6) питания переменного тока (АС); звено (3) DC, включающее в себя конденсатор (3а), подключенный параллельно выходу схемы (2) преобразователя, и выполненное с возможностью вывода пульсирующего напряжения (vdc) DC; схему (4) инвертора, выполненную с возможностью преобразования выхода звена (3) DC в АС путем коммутации и подачи АС в подключенный к ней двигатель (7); и контроллер (5), выполненный с возможностью управления коммутацией таким образом, что токи (iu, iv и iw) двигателя (7) пульсируют синхронно с пульсацией напряжения (vin) питания. Контроллер (5) управляет коммутацией в соответствии с нагрузкой двигателя (7) или рабочим состоянием двигателя (7) и снижает амплитуду пульсации токов (iu, iv и iw).
В данной конфигурации емкость конденсатора (3а) устанавливается такой, чтобы напряжение (vdc) звена DC пульсировало более интенсивно, тем самым увеличивая ширину электропроводности в схеме (2) преобразователя и повышая коэффициент мощности. Кроме того, управление коммутацией в схеме (4) инвертора осуществляется таким образом, что токи (iu, iv и iw) двигателя (7) пульсируют синхронно с пульсацией напряжения (vin) питания. Таким образом, гармоника входного тока (iin), подаваемого с источника (6) питания АС в устройство (1) преобразования мощности, уменьшается. Поскольку амплитуда пульсации токов (iu, iv и iw) уменьшается в соответствии с нагрузкой двигателя (7), подключенного к схеме (4) инвертора, или рабочим состоянием двигателя (7), действующие значения токов (iu, iv и iw), протекающих в двигатель (7), снижаются.
В соответствии со вторым аспектом изобретения, в устройстве преобразования мощности первого аспекта контроллер (5) уменьшает амплитуду пульсации в соответствии, по меньшей мере, с одним из токов (iu, iv и iw), электрической мощности, скорости (ωm) или крутящего момента двигателя (7).
При использовании одного из токов (iu, iv и iw), электрической мощности, скорости (ωm) или крутящего момента двигателя (7) обнаруживается величина нагрузки схемы (4) инвертора, которой является двигатель (7). В данной конфигурации управление амплитудой пульсации токов (iu, iv и iw) осуществляется с использованием любого из этих обнаруженных значений или совокупности обнаруженных значений. Традиционно устройства преобразования мощности включают в себя механизм для обнаружения фазового угла (θin) входного АС, токов (iu, iv и iw), скорости (ωm) и крутящего момента двигателя (7). Поэтому эти значения легко обнаруживаются.
В соответствии с третьим аспектом изобретения, в устройстве преобразования мощности первого или второго аспекта контроллер (5) управляет коммутацией таким образом, что напряжение (vdc) DC выше нуля, и снижает амплитуду пульсации.
В данной конфигурации контроллер (5) управляет коммутацией таким образом, что напряжение (vdc) звена DC выше нуля. Таким образом, в качестве средства обнаружения тока двигателя (7) используется так называемая «система второго контура», при этом состояние коммутации схемы (4) инвертора надежно обнаруживается.
В соответствии с четвертым аспектом изобретения, в устройстве преобразования мощности первого аспекта контроллер (5) снижает амплитуду пульсации при запуске двигателя (7).
В данной конфигурации ввиду того, что при запуске двигателя (7) амплитуда пульсации снижается, крутящим моментом двигателя (7) при запуске управляют так, чтобы он был постоянным.
В соответствии с пятым аспектом изобретения, в устройстве преобразования мощности первого аспекта контроллер (5) постепенно снижает амплитуду пульсации после запуска двигателя (7).
В данной конфигурации после запуска двигателя (7) пульсация токов (iu, iv и iw) двигателя уменьшает гармонику входного тока (iin), подаваемого с источника (6) питания АС в устройство (1) преобразования мощности.
В соответствии с шестым аспектом изобретения, в устройстве преобразования мощности в соответствии с аспектами с первого по пятый контроллер (5) включает в себя контроллер (56) тока, выполняющий, по меньшей мере, одно из пропорционального управления, интегрального управления или дифференциального управления для снижения отклонения опорных значений (id* и iq*) токов (iu, iv и iw) от фактических значений токов (id и iq), и изменяет коэффициент усиления контура управления при снижении амплитуды пульсации.
В данной конфигурации управление амплитудой пульсации токов (iu, iv и iw) двигателя (7) осуществляется с помощью, по меньшей мере, одного из пропорционального управления, интегрального управления или дифференциального управления.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретения в тех случаях, когда нагрузка подключенного двигателя (7) меньше предварительно определенного значения, действующие значения токов, протекающих через двигатель (7), уменьшаются, благодаря чему повышается коэффициент полезного действия двигателя (7). То есть, настоящее изобретение повышает как коэффициент мощности, так и коэффициент полезного действия двигателя (7).
В соответствии со вторым аспектом изобретения ввиду того, что нагрузка, подключенная к схеме (4) инвертора, легко обнаруживается, легко осуществляется управление амплитудой пульсации.
В соответствии с третьим аспектом изобретения, в тех случаях, когда в качестве средства обнаружения тока двигателя (7) используется так называемая «система второго контура», состояние коммутации схемы (4) инвертора надежно обнаруживается, благодаря чему осуществляется надежное управление значениями тока двигателя (7).
В соответствии с четвертым аспектом изобретения при запуске крутящим моментом двигателя (7) управляют так, чтобы он был постоянным, благодаря чему осуществляется стабильное управление двигателем (7). Кроме того, снижается падение коэффициента полезного действия при запуске.
В соответствии с пятым аспектом изобретения уменьшается гармоника входного тока (iin), подаваемого с источника (6) питания АС в устройство (1) преобразования мощности, благодаря чему после запуска двигателя (7) повышается коэффициент мощности.
В соответствии с шестым аспектом изобретения контроллер (56) тока, который, как правило, входит в схему (4) инвертора, управляет амплитудой пульсации токов (iu, iv и iw) двигателя, благодаря чему легко осуществляется управление амплитудой пульсации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства преобразования мощности в соответствии с первым вариантом осуществления настоящего изобретения.
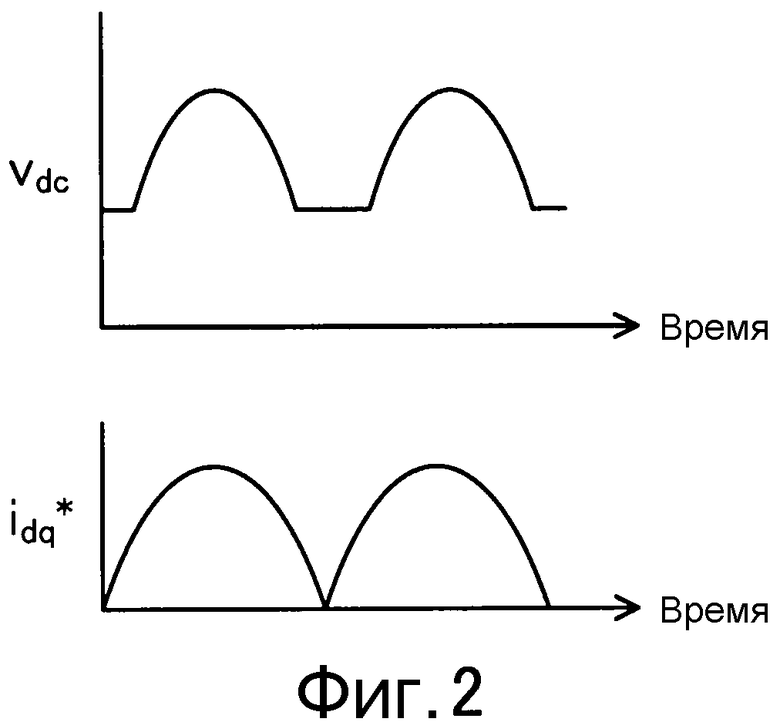
Фиг. 2 иллюстрирует формы сигнала напряжения звена DC и опорное значение управляющего тока, где k=1 в приведенном ниже уравнении (1).
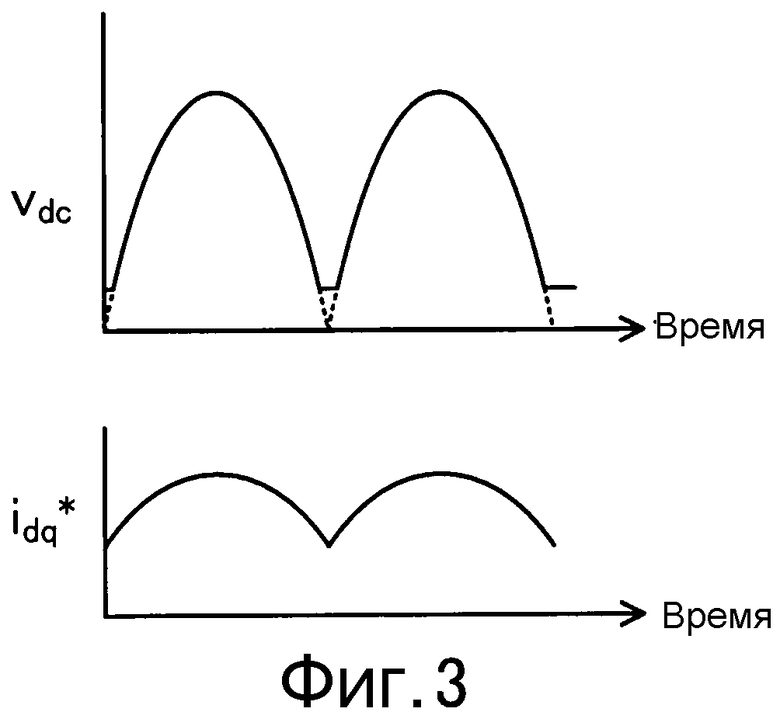
Фиг. 3 иллюстрирует формы сигнала напряжения звена DC и опорное значение управляющего тока, где k меньше 1 в приведенном ниже уравнении (1).
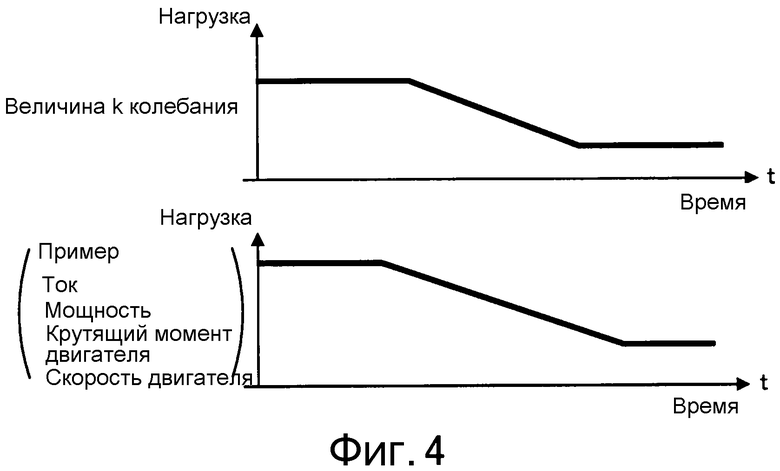
Фиг. 4 представляет собой временную диаграмму, иллюстрирующую соотношение между величиной колебания и нагрузкой.
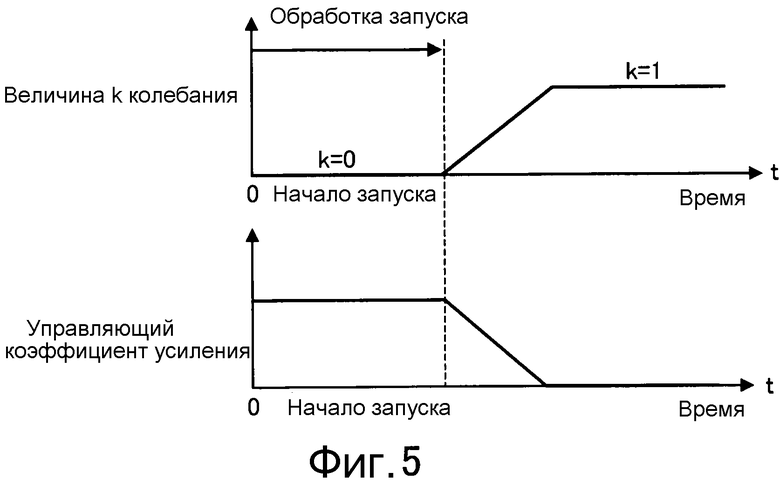
Фиг. 5 представляет собой временную диаграмму, иллюстрирующую соотношение между величиной колебания и коэффициентом усиления контура управления в контроллере тока оси dq при запуске двигателя.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже со ссылками на чертежи подробно описываются варианты осуществления настоящего изобретения. Необходимо отметить, что описываемые ниже варианты осуществления излагаются лишь с целью представления предпочтительных по характеру примеров и не предполагают ограничения объема, применений и использования изобретения.
Первый вариант осуществления настоящего изобретения
Конфигурация
Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства (1) преобразования мощности в соответствии с первым вариантом осуществления настоящего изобретения. Как показано на чертеже, устройство (1) преобразования мощности включает в себя схему (2) преобразователя, звено (3) DC, схему (4) инвертора и контроллер (5). Устройство (1) преобразования мощности преобразует мощность АС, поступающую с однофазного источника (6) питания АС, в мощность, имеющую предварительно определенную частоту, а затем подает мощность в двигатель (7). Двигатель (7) в соответствии с данным вариантом осуществления представляет собой трехфазный двигатель АС для приведения в действие компрессора, предусмотренного в схеме циркуляции хладагента в установке кондиционирования воздуха.
<Схема (2) преобразователя>
Схема (2) преобразователя соединена с источником (6) питания АС и выполняет двухполупериодное выпрямление выхода АС с источника (6) питания АС в DC. В данном примере схема (2) преобразователя представляет собой схему диодного моста, в которой множество (четыре в данном варианте осуществления) диодов (D1-D4) соединены друг с другом в конфигурации моста. Диоды (D1-D4) выполняют двухполупериодное выпрямление напряжения АС источника (6) питания АС в напряжение DC.
<Звено (3) DC>
Звено (3) DC содержит конденсатор (3а). Конденсатор (3а) подключен параллельно выходу схемы (2) преобразователя. Напряжение DC (т.е. напряжение (vdc) звена DC), создаваемое на обоих концах конденсатора (3а), подается на входные узлы схемы (4) инвертора. Конденсатор (3а) представляет собой, например, пленочный конденсатор. Конденсатор (3а) имеет электростатическую емкость, сглаживающую лишь напряжение пульсаций (т.е. колебание напряжения), создаваемое в соответствии с частотой коммутации, когда коммутирующие устройства схемы (4) инвертора, которая описывается ниже, выполняют коммутацию. То есть, конденсатор (3а) представляет собой конденсатор с малой емкостью, который не имеет электростатической емкости, сглаживающей напряжение, выпрямляемое схемой (2) преобразователя (т.е. колебание напряжения, вызываемое напряжением питания). Следовательно, напряжение (vdc) звена DC, выдаваемое со звена (3) DC, имеет столь большую пульсацию, что его максимальное значение в два или более раз превышает минимальное значение.
<Схема (4) инвертора>
Входные узлы схемы (4) инвертора соединены параллельно с конденсатором (3а) звена (3) DC. Схема (4) инвертора преобразует выход звена (3) DC в трехфазный АС путем коммутации и подает АС на соединенный с ней двигатель (7). В схеме (4) инвертора в соответствии с данным вариантом осуществления множество коммутирующих устройств соединено друг с другом в конфигурации моста. Данная схема (4) инвертора выдает трехфазный АС в двигатель (7) и, следовательно, имеет шесть коммутирующих устройств (Su, Sv, Sw, Sx, Sy и Sz). В частности, схема (4) инвертора содержит три коммутирующих ветви, в каждой из которых два коммутирующих устройства последовательно соединены друг с другом. Каждая из коммутирующих ветвей соединена с фазной обмоткой (не показана) двигателя (7) в средней точке между коммутирующим устройством (Su, Sv или Sw) верхнего плеча и коммутирующим устройством (Sx, Sy или Sz) нижнего плеча. Каждый из обратных диодов (Du, Dv, Dw, Dx, Dy и Dz) соединен встречно-параллельно с соответствующим одним из коммутирующих устройств (Su, Sv, Sw, Sx, Sy и Sz). Схема (4) инвертора выполняет операцию включения/выключения коммутирующих устройств (Su, Sv, Sw, Sx, Sy и Sz) для преобразования напряжения (vdc) звена DC, выдаваемого со звена (3) DC, в трехфазное напряжение АС путем коммутации, а затем подает напряжение на двигатель (7). Контроллер (5) управляет операцией включения/выключения.
<Контроллер (5)>
Контроллер (5) управляет коммутацией (операцией включения/выключения) в схеме (4) инвертора таким образом, что токи (т.е. токи (iu, iv и iw) двигателя), протекающие в двигателе (7), пульсируют синхронно с пульсацией напряжения (vin) питания. В данном примере контроллер (5) содержит контроллер (50) скорости, генератор (51) опорного тока, умножитель (52), генератор (54) опорного значения тока dq, преобразователь (55) координат, контроллер (56) тока оси dq и контроллер (57) широтно-импульсной модуляции (ШИМ).
Контроллер (50) скорости
Контроллер (50) скорости содержит вычитатель (50а) и пропорционально-интегральный (ПИ) оператор (50b). Контроллер (50) скорости вычисляет разность между угловой скоростью (ωm) вращения механического угла двигателя (7) и опорным значением (ωm*) механического угла с помощью вычитателя (50а) и выполняет пропорционально-интегральную операцию (ПИ операцию) c помощью ПИ оператора (50b) для выдачи первого опорного значения тока (im*) в умножитель (52).
Генератор (51) опорного тока
Генератор (51) опорного тока принимает синусное значение (sin(θin)) фазового угла (θin) напряжения (vin) питания, получает коэффициент модуляции (т.е. колебание), выражаемый нижеследующим уравнением (1), на основе начального значения и выдает коэффициент модуляции (т.е. колебание) в умножитель (52)
колебание=k|sinθin|+(1-k) (1)
В уравнении (1) k является действительным числом, равным 0<k≤1. Как будет подробно описываться ниже, генератор (51) опорного тока изменяет значение k (далее именуемое также «величиной колебания») в соответствии с величиной нагрузки, которой является двигатель (7). В данном примере генератор (51) опорного тока устанавливает постоянное значение k в тех случаях, когда нагрузка больше или равна предварительно определенному значению, и уменьшает значение k, когда нагрузка меньше предварительно определенного значения. При уменьшении значения k генератор (51) опорного тока проверяет напряжение (vdc) звена DC и постоянно изменяет установленное значение k, как будет подробно описываться ниже. То есть, при уменьшении значения k генератор (51) опорного тока управляет амплитудой пульсации токов (iu, iv и iw) в соответствии с нагрузкой. Величина нагрузки известна, по меньшей мере, по одному из обнаруженных значений скорости (ωm), крутящего момента, токов (iu, iv и iw) двигателя и электрической мощности двигателя (7), либо по совокупности обнаруженных значений.
Умножитель (52)
Умножитель (52) умножает первое опорное значение тока (im*), выдаваемое с контроллера (50) скорости, на коэффициент модуляции (т.е. колебание), выдаваемый с генератора (51) опорного тока, и выдает опорное значение управляющего тока (idq*) в генератор (54) опорного значения тока dq. Опорное значение управляющего тока (idq*) выражается с помощью нижеследующего уравнения (2)
idq*=im*×пульсация (2)
Генератор (54) опорного значения тока dq
Генератор (54) опорного значения тока dq получает опорное значение тока (id*) оси d и опорное значение тока (iq*) оси q по опорному значению управляющего тока (idq*) и опорному значению фазы (β*) тока, которая описывается ниже, на основе нижеследующего уравнения (3) и выдает полученные значения в контроллер (56) тока оси dq. В частности, генератор (54) опорного значения тока dq умножает опорное значение управляющего тока (idq*) на отрицательное синусное значение (-sinβ*) и косинусное значение (-cosβ*) предварительно определенного значения (β*) для генерирования опорного значения тока (id*) оси d и опорного значения тока (iq*) оси q соответственно. Значение β* является опорным значением тока, протекающего через двигатель (7) в фазе β
Преобразователь (55) координат
Преобразователь (55) координат получает ток (id) оси d и ток (iq) оси q по углу вращения (электрическому углу (θe)) ротора (не показан) двигателя (7) и токам (iu, iv и iw) двигателя. В частности, преобразователь (55) координат получает ток (id) оси d и ток (iq) оси q на основе нижеследующего уравнения (4)
Контроллер (56) тока оси dq
Контроллер (56) тока оси dq является примером контроллера тока настоящего изобретения. Контроллер (56) тока оси dq управляет схемой (4) инвертора с помощью контроллера (57) ШИМ для уменьшения отклонения опорных значений (id* и iq*) токов (iu, iv и iw) двигателя от фактических значений тока. В данном варианте осуществления контроллер (56) тока оси dq содержит три контроллера: пропорциональный контроллер, интегральный контроллер и дифференциальный контроллер. То есть, контроллер (56) тока оси dq выполняет пропорционально-интегрально-дифференциальную (ПИД) операцию. В частности, контроллер (56) тока оси dq принимает угловую скорость (ωm) электрического угла, которая является скоростью вращения двигателя (7), ток (id) оси d и ток (iq) оси q, опорное значение тока (id*) оси d и опорное значение тока (iq*) оси q. Затем контроллер (56) тока оси dq выдает опорное значение напряжения (vd*) оси d и опорное значение напряжения (vq*) оси q в контроллер (57) ШИМ на основе нижеследующего уравнения (5). В уравнении (5) Ld и Lq представляют собой индуктивность двигателя по оси d и оси q, а φа представляет собой постоянную противоэлектродвижущей силы (противо-ЭДС) двигателя. Ra представляет собой сопротивление обмотки двигателя. Условное обозначение s представляет собой дифференциальный оператор. KPd, KId и KDd представляют собой пропорциональный коэффициент усиления контура управления, интегральный коэффициент усиления контура управления и дифференциальный коэффициент усиления контура управления соответственно. В уравнении (5) первый и второй члены с правой стороны основаны на традиционной модели двигателя, а третий член основан на ПИД операции

Контроллер (57) ШИМ
Контроллер (57) ШИМ принимает опорное значение напряжения (vd*) оси d, опорное значение напряжения (vq*) оси q, напряжение (vdc) звена DC и электрический угол (θe) и генерирует сигналы опорных значений (Tu, Tv и Tw) для управления операцией включения/выключения коммутирующих устройств (Su, Sv, Sw, Sx, Sy и Sz) на основе этих значений. В частности, сначала контроллер (57) ШИМ получает опорные значения (vu*, vv* и vw*) фазового угла на основе нижеследующего уравнения (6)
Затем контроллер (57) ШИМ получает время τj включенного состояния коммутирующих устройств (Su, Sv или Sw) верхнего плеча в фазах по опорным значениям (vu*, vv* и vw*) фазового угла и напряжению (vdc) звена DC на основе нижеследующего уравнения (7). В уравнении (7) Тс представляет собой период несущей. В уравнении (7) j=u, v, w. Например, τu представляет собой время, когда коммутирующее устройство (Su) верхнего плеча включено в фазе U.
Контроллер (57) ШИМ устанавливает время τj включенного состояния, равным периоду (Тс) несущей в тех случаях, когда результат вычисления уравнения (7) больше периода (Тс) несущей, и равным 0 в тех случаях, когда результат вычисления меньше 0

После этого контроллер (57) ШИМ выдает в схему (4) инвертора сигналы опорных значений (Tu, Tv и Tw) для выполнения операции включения/выключения коммутирующих устройств (Su, Sv, Sw, Sx, Sy и Sz) в фазах в соответствии со временем τj включенного состояния в каждом периоде (Тс) несущей.
<Действие устройства (1) преобразования мощности>
В данном варианте осуществления ввиду того, что звено DC содержит конденсатор (3а) с малой емкостью, напряжение (vdc) звена DC главным образом пульсирует. Пульсация напряжения (vdc) звена DC увеличивает ширину электропроводности диодов (D1-D4) схемы (2) преобразователя, посредством этого повышая коэффициент мощности. Контроллер (5) управляет коммутацией в схеме (4) инвертора таким образом, что токи (iu, iv и iw) двигателя пульсируют синхронно с пульсацией напряжения (vin) питания. Это уменьшает гармонику входного тока (iin), подаваемого с источника (6) питания АС в устройство (1) преобразования мощности. Данный вариант осуществления отличается управлением схемой (4) инвертора в период малой нагрузки, например, при работе двигателя (7) с малой скоростью вращения. Работа устройства (1) преобразования мощности в период малой нагрузки описывается ниже. Работа традиционного устройства преобразования мощности в период малой нагрузки соответствует случаю k=1 в уравнении (1). Фиг. 2 иллюстрирует формы сигнала напряжения (vdc) звена DC и опорное значение управляющего тока (idq*) в случае, если k=1 в уравнении (1). В том случае, если k=1, как показано на чертеже, опорное значение управляющего тока (idq*) уменьшается приблизительно до нуля таким образом, что ток двигателя главным образом пульсирует. В результате этого в традиционном устройстве преобразования мощности действующие значения токов двигателя в период малой нагрузки могут возрастать, посредством этого снижая коэффициент полезного действия двигателя. В устройстве (1) преобразования мощности в соответствии с данным вариантом осуществления схема (4) инвертора может действовать при k=1 в соответствии с рабочим состоянием (например, в период большой нагрузки и т.д.).
Как правило, электростатическая емкость конденсатора (3а) звена (3) DC устанавливается такой, чтобы сглаживать колебание в соответствии с коммутацией коммутирующих устройств (Su, Sv, Sw, Sx, Sy и Sz) в тех случаях, когда нагрузка максимальна. При такой установке емкости, как показано на фиг. 2, напряжение (vdc) звена DC не уменьшается до нуля вблизи перехода через нулевое значение напряжения источника (6) питания АС, при этом в период малой нагрузки конденсатор (3а) в некоторой степени заряжается. Традиционное устройство преобразования мощности снижает ток двигателя (7), подключенного в качестве нагрузки, приблизительно до нуля, в то время как имеется некоторое напряжение (vdc) звена DC для создания большой пульсации тока. В таком состоянии двигатель (7) не может создавать какой-либо крутящий момент вблизи перехода через нулевое значение.
Однако в том случае, если конденсатор (3а) заряжается вблизи перехода через нулевое значение, предполагается, что двигатель (7) создает крутящий момент с использованием зарядного напряжения конденсатора (3а). В частности, конденсатор (3а) разряжается за счет уменьшения колебания (т.е. пульсации) токов (iu, iv и iw) двигателя. Посредством этого снижаются действующие значения токов (iu, iv и iw) двигателя, требуемых для создания крутящего момента, по сравнению с традиционными методами.
В частности, в устройстве (1) преобразования мощности генератор (51) опорного тока контроллера (5) уменьшает величину k в уравнении (1) в период малой нагрузки по сравнению с периодом большой нагрузки для получения коэффициента модуляции (т.е. колебания). В случае, если величина k меньше, коэффициент модуляции (т.е. колебание) напряжения входа АС с источника (6) питания АС вблизи нуля является большим по сравнению со случаем, в котором k=1. То есть, амплитуда коэффициента модуляции (т.е. колебания) меньше. Фиг. 3 иллюстрирует формы сигнала напряжения (vdc) звена DC и опорное значение управляющего тока (idq*), где k меньше 1 в приведенном ниже уравнении (1). Как показано на чертеже, опорное значение управляющего тока (idq*) больше вблизи перехода через нулевое значение по сравнению со случаем, в котором k=1.
Как описано выше, величина нагрузки известна по одному из обнаруженных значений скорости (ωm), крутящего момента, токов (iu, iv и iw) двигателя и электрической мощности двигателя (7), либо по совокупности обнаруженных значений. Фиг. 4 представляет собой временную диаграмму, иллюстрирующую соотношение между величиной (k) колебания и нагрузкой. Как показано на фиг. 4, по мере того, как величина нагрузки уменьшается с предварительно определенной величины, контроллер (5) постепенно уменьшает величину k. В связи с этим, когда опорное значение управляющего тока (idq*) вблизи перехода через нулевое значение возрастает, опорное значение тока (id*) оси d и опорное значение тока (iq*) оси q, выдаваемые с генератора (54) опорного значения тока dq, возрастают (см. уравнение (3)). В результате опорное значение напряжения (vd*) оси d и опорное значение напряжения (vq*) оси q, выдаваемые с контроллера (56) тока оси dq, вблизи перехода через нулевое значение являются большими по сравнению со случаем, в котором k=1 (см. уравнение (5)). Посредством этого увеличивается время включенного состояния коммутирующих устройств (Su, Sv или Sw) верхнего плеча в предварительно определенных фазах, разряжается заряд в конденсаторе (3а) и снижается амплитуда пульсации токов (iu, iv и iw) двигателя. В связи с этим, амплитуда пульсации уменьшается, и действующие значения токов (iu, iv и iw) двигателя уменьшаются, благодаря чему снижаются потери в обмотке двигателя (7) и повышается коэффициент полезного действия двигателя.
Действующие значения токов (iu, iv и iw) двигателя уменьшаются с уменьшением величины k в уравнении (1), поэтому предполагается, что с уменьшением величины k увеличивается повышение коэффициента полезного действия двигателя. Однако если величина k слишком мала, т.е. колебание токов (iu, iv и iw) двигателя уменьшается слишком сильно, конденсатор (3а) полностью разряжается, доводя напряжение (vdc) звена DC до нуля. В случаях, когда напряжение (vdc) звена DC является нулевым, и, например, в качестве средства обнаружения тока двигателя (7) применяется система (так называемая «система второго контура») с использованием шунтирующих резисторов, состояние коммутации схемы (4) инвертора (т.е. какое из верхних и нижних плеч схемы (4) инвертора включено) не обнаруживается, и токи двигателя (7) не обнаруживаются. Поэтому в случаях, когда применяется система второго контура, существует необходимость в управлении коммутацией схемы (4) инвертора таким образом, чтобы напряжение (vdc) звена DC было выше нуля (см. фиг. 3).
Следовательно, в тех случаях, когда в данном варианте осуществления используется система второго контура, существует необходимость в регулировании величины k таким образом, чтобы напряжение (vdc) звена DC было выше нуля. Например, величина k может быть установлена таким образом, чтобы напряжение (vdc) звена DC приблизительно равнялось напряжению включенного состояния обратных диодов (Du, Dv, Dw, Dx, Dy и Dz). В данном варианте осуществления при уменьшении величины k генератор (51) опорного тока проверяет напряжение (vdc) звена DC и постоянно изменяет установленную величину k.
Если величина k слишком мала, может уменьшиться коэффициент мощности источника питания, либо может увеличиться гармоническая составляющая входного тока. Поэтому существует также необходимость в установлении величины k в соответствии с рабочим состоянием.
Преимущества варианта осуществления
Как описано выше, в данном варианте осуществления напряжение (vdc) звена DC главным образом пульсирует в звене (3) DC для увеличения ширины электропроводности в схеме (2) преобразователя и повышения посредством этого коэффициента мощности. В период малой нагрузки действующие значения токов, протекающих в двигатель (7), снижаются, благодаря чему повышается коэффициент полезного действия двигателя (7).
Второй вариант осуществления настоящего изобретения
Во втором варианте осуществления описывается пример управления при запуске двигателя (7). В данном варианте осуществления сама конфигурация схемы устройства (1) преобразования мощности является такой же, как и в первом варианте осуществления.
Например, в схеме инвертора, содержащей конденсатор малой емкости в звене DC, при пульсации тока двигателя синхронно с источником питания в период малой нагрузки, например, при запуске двигателя, коэффициент полезного действия может понизиться, либо управление может быть нестабильным. В данном варианте осуществления управление схемой (4) инвертора при запуске двигателя (7) осуществляется таким образом, что крутящий момент, т.е. токи (iu, iv и iw) двигателя, является постоянным.
Фиг. 5 представляет собой временную диаграмму, иллюстрирующую соотношение между величиной (k) колебания и коэффициентом усиления контура управления в контроллере (56) тока оси dq при запуске двигателя (7). Контроллером (56) тока оси dq является, например, контроллер, выполняющий, по меньшей мере, одно из пропорционального управления, интегрального управления или дифференциального управления для снижения отклонения значений (id* и iq*) токов (iu, iv и iw) двигателя от фактических значений токов. Например, в тех случаях, когда контроллер (56) тока оси dq выполняет любое из управлений, коэффициент усиления контура управления контроллера (56) тока оси dq является коэффициентом усиления контура управления выбранного управления. В тех случаях, когда контроллер (56) тока оси dq выполняет комбинацию из множества типов управления, коэффициент усиления контура управления контроллера (56) тока оси dq является коэффициентом усиления контура управления, по меньшей мере, одного из типов управления.
Как показано на фиг. 5, в период (т.е. период обработки запуска) обработки запуска контроллер (56) тока оси dq устанавливает коэффициент усиления контура управления относительно высоким. Обработка запуска предназначена для перевода двигателя (7) из остановленного состояния в рабочее состояние с целевой скоростью вращения.
В данном примере контроллер (5) управляет схемой (4) инвертора в том случае, когда k=0 в период обработки запуска. В результате токи (iu, iv и iw) двигателя в период обработки запуска не пульсируют. По окончании обработки запуска, т.е. когда двигатель (7) работает с целевой скоростью вращения, контроллер (56) тока оси dq постепенно снижает коэффициент усиления контура управления. С другой стороны, по окончании обработки запуска контроллер (5) постепенно увеличивает величину k в соответствии с величиной нагрузки. Посредством этого постепенно увеличивается амплитуда пульсации токов (iu, iv и iw) двигателя. В данном примере величина k (т.е. величина колебания) устанавливается равной 1.
Преимущества варианта осуществления
Как описано выше, в данном варианте осуществления до тех пор, пока двигатель (7) не будет запущен и не будет работать с предварительно определенной скоростью вращения, токи (iu, iv и iw) двигателя управляются таким образом, что они не пульсируют. Таким образом, в данном варианте осуществления крутящим моментом двигателя (7) при запуске управляют так, чтобы он был постоянным, благодаря чему осуществляется устойчивое управление двигателем (7). Благодаря этому также уменьшается падение коэффициента полезного действия при запуске. Поскольку по окончании обработки запуска амплитуда пульсации токов (iu, iv и iw) двигателя постепенно увеличивается, коэффициент мощности после запуска повышается.
Другие варианты осуществления
Способ получения коэффициента модуляции (т.е. колебания) (уравнение (1)) является лишь примером. Например, в уравнении (1) вместо абсолютного значения синусного значения фазового угла (θin) могут использоваться различные типы вычислений, например, вычисление с помощью квадрата синусного значения. Дело в том, что коэффициент модуляции (т.е. колебание) устанавливается таким образом, что амплитуда пульсации токов (iu, iv и iw) двигателя изменяется в соответствии с нагрузкой и рабочим состоянием двигателя (7).
Конфигурация контроллера (56) тока оси dq является лишь примером. Например, контроллер (56) тока оси dq может представлять собой любой из пропорционального контроллера, интегрального контроллера или дифференциального контроллера, либо может представлять совокупность пропорционального контроллера, интегрального контроллера и дифференциального контроллера для снижения отклонения опорных значений (id* и iq*) токов (iu, iv и iw) двигателя от фактических значений токов.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение целесообразно применять в устройстве преобразования мощности, преобразующем входную мощность в предварительно определенную мощность путем коммутации.
ОПИСАНИЕ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
Изобретение относится к области электротехники и может быть использовано в преобразователях мощности. Технический результат - повышение коэффициента мощности и коэффициента полезного действия. Звено (3) DC содержит конденсатор (3а), подключенный параллельно выходу схемы (2) преобразователя, и выдает пульсирующее напряжение (vdc) звена DC. Схема (4) инвертора преобразует выход звена (3) DC в АС путем коммутации и подает АС в подключенный к ней двигатель (7). Контроллер (5) управляет коммутацией схемы (4) инвертора таким образом, что токи (iu, iv и iw) двигателя пульсируют синхронно с пульсацией напряжения (vin) питания. Контроллер (5) управляет коммутацией схемы (4) инвертора в соответствии с нагрузкой двигателя (7) или рабочим состоянием двигателя (7) и снижает амплитуду пульсации токов (iu, iv и iw) двигателя. 5 з.п. ф-лы, 5 ил.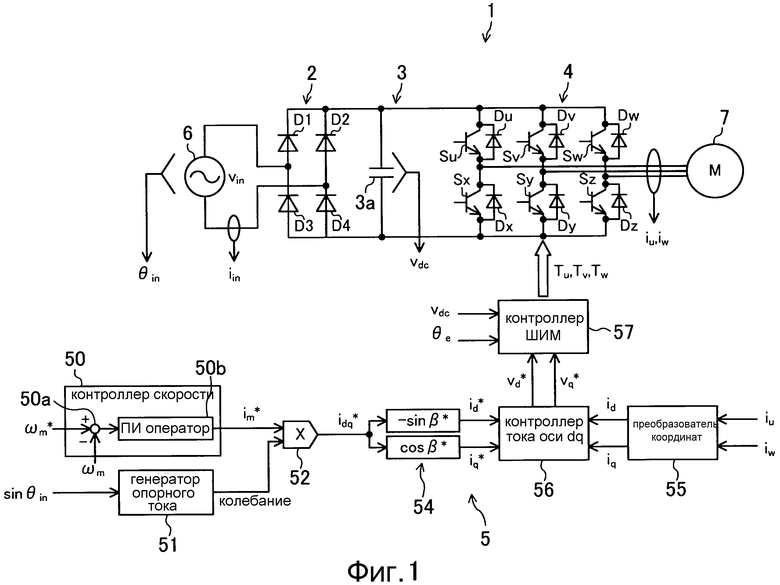
1. Устройство преобразования мощности, содержащее:
схему (2) преобразователя, выполненную с возможностью осуществления двухполупериодного выпрямления напряжения (vin) питания источника (6) питания АС;
звено (3) DC, включающее в себя конденсатор (3а), подключенный параллельно выходу схемы (2) преобразователя, и выполненное с возможностью вывода пульсирующего напряжения (vdc) DC;
схему (4) инвертора, выполненную с возможностью преобразования выхода звена (3) DC в АС путем коммутации и подачи АС в подключенный к ней двигатель (7); и
контроллер (5), выполненный с возможностью управления коммутацией таким образом, что токи (iu, iv и iw) двигателя (7) пульсируют синхронно с пульсацией напряжения (vin) питания, причем
контроллер (5) управляет коммутацией в соответствии с нагрузкой двигателя (7) или рабочим состоянием двигателя (7) и снижает амплитуду пульсации токов (iu, iv и iw).
2. Устройство преобразования мощности по п. 1, причем
контроллер (5) уменьшает амплитуду пульсации в соответствии, по меньшей мере, с одним из токов (iu, iv и iw), электрической мощности, скорости (ωm) или крутящего момента двигателя (7).
3. Устройство преобразования мощности по п. 1 или 2, причем
контроллер (5) управляет коммутацией таким образом, что напряжение (vdc) DC выше нуля, и снижает амплитуду пульсации.
4. Устройство преобразования мощности по п. 1, причем
контроллер (5) снижает амплитуду пульсации при запуске двигателя (7).
5. Устройство преобразования мощности по п. 4, причем
контроллер (5) постепенно снижает амплитуду пульсации после запуска двигателя (7).
6. Устройство преобразования мощности по п. 1, причем
контроллер (5) включает в себя контроллер (56) тока, выполняющий, по меньшей мере, одно из пропорционального управления, интегрального управления или дифференциального управления для снижения отклонения опорных значений (id* и iq*) токов (iu, iv и iw) от фактических значений токов (id и iq), и изменяет коэффициент усиления контура управления при снижении амплитуды пульсации.
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЕКТОРОМ АСИНХРОННОГО ДВИГАТЕЛЯ, СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ АСИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ АСИНХРОННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2392732C1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| DE 102005028945 A1, 27.04.2006 | |||
| JP 2005130666 A, 19.05.2005 | |||
| KR 20100134790 A, 23.12.2010 | |||
| US 6313602 B1, 06.11.2001 | |||
| Способ производства абразивного инструмента | 1982 |
|
SU1049241A2 |
| WO 2009133700 A1, 05.11.2009 | |||

