Изобретение относится к области измерения параметров движения объектов и может быть применено для определения положения и скорости объекта, движущегося относительно другого объекта (основания).
Известен датчик положения объекта (снаряда), содержащий источник магнитного поля в виде кольцевого постоянного магнита, охватывающего объект и имеющего намагниченность вдоль направления движения объекта, и преобразователь магнитного поля в виде катушки индуктивности (индуктивного контура), установленной на неподвижном основании (стволе) со стороны движущегося объекта. Плоскость кольцевого магнита и ось катушки индуктивности перпендикулярны направлению движения объекта. При прохождении объекта вблизи датчика потокосцепление (магнитный поток) в преобразователе магнитного поля изменяется, при этом в катушке индуктивности появляется э.д.с., по которой определяют положение объекта относительно неподвижного основания (см. Bogdanoff D.W., Knowlen С., Murakami D. and Stonich I. Magnetic Detector for Projectiles in Tubes. - AIAA Jornal, Vol.28, No.11, 1990, p.p.1942-1944).
Наиболее близким техническим решением (прототипом) является датчик положения объекта, движущегося относительно основания - другого объекта (патент RU №2339957, МПК 8 G01P 3/42, опубл. 27.11.2008, Бюл. №33), состоящий из источника магнитного поля (постоянного магнита или электромагнита постоянного тока с намагниченностью, перпендикулярной направлению движения объекта), установленного в заданном месте основания, и преобразователя магнитного поля, установленного на другом объекте со стороны основания и выполненного в виде измерителя магнитного поля или охватывающего объект кольцевого электрического контура (индуктивного контура), плоскость которого перпендикулярна направлению движения объекта. При взаимном перемещении источника магнитного поля и индуктивного контура в последнем появляется сигнал, по которому фиксируют взаимное положение объектов.
Недостатками известных устройств являются низкая точность определения положения движущегося объекта из-за электромагнитных помех в индуктивном контуре.
Предлагаемое изобретение направлено на повышение точности определения положения движущегося объекта.
По первому варианту указанный технический результат достигается тем, что в датчике положения объекта, движущегося относительно другого объекта, содержащем источник магнитного поля, установленный на одном из объектов, и преобразователь магнитного поля в виде индуктивного контура, установленного на другом объекте, в отличие от прототипа внутри или снаружи первого индуктивного контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля, установлен второй индуктивный контур, соединенный с первым контуром последовательно-встречно по отношению к магнитному потоку источника магнитного поля.
Число витков N2 второго индуктивного контура может быть выбрано из условия N2=S1N1/S2, где S1 и N1 - площадь поперечного сечения и число витков первого контура, S2 - площадь поперечного сечения второго контура. Индуктивные контуры могут иметь одинаковое число витков, а датчик может быть снабжен одной или несколькими пластинами из ферромагнитного материала, установленными между контурами.
По второму варианту технический результат достигается тем, что в датчике положения объекта, движущегося относительно другого объекта, содержащем источник магнитного поля, установленный на одном из объектов, и преобразователь магнитного поля в виде индуктивного контура, установленный на другом объекте, в отличие от прототипа он дополнительно снабжен блоком преобразования сигналов, обеспечивающим снижение уровня помех на выходе датчика, в преобразователе магнитного поля внутри или снаружи первого индуктивного контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля, установлен второй индуктивный контур, при этом выходы индуктивных контуров соединены с соответствующими входами блока преобразования сигналов.
Датчик может быть снабжен одной или несколькими пластинами из ферромагнитного материала, установленными между индуктивными контурами.
Применение второго индуктивного контура, установленного внутри или снаружи первого контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля и соединенного с первым контуром последовательно-встречно по отношению к магнитному потоку источника магнитного поля, позволяет использовать электромагнитные помехи, возникающие во втором контуре, для полного или частичного подавления таких же помех в первом контуре.
Выбор числа витков второго индуктивного контура из условия N2=S1N1/S2, где S1 и N1 - площадь поперечного сечения и число витков первого контура, S2 - площадь поперечного сечения второго контура, обеспечивает максимальное подавление помех на выходе контуров при их последовательно-встречном соединении по отношению к магнитному потоку источника магнитного поля.
Выбор числа витков индуктивных контуров равными друг другу обеспечивает упрощение датчика при подавлении помех, близком к максимальному.
Установка одной или нескольких пластин из ферромагнитного материала между контурами дает возможность усилить полезный сигнал, снимаемый с последовательно-встречно соединенных контуров, за счет того, что потокосцепление с источником магнитного поля для первого (ближнего к источнику магнитного поля) контура увеличивается, а для второго контура уменьшается.
Снабжение датчика блоком преобразования сигналов, обеспечивающим снижение уровня помех на выходе датчика, установка в преобразователе магнитного поля внутри или снаружи первого индуктивного контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля, второго индуктивного контура, соединение при этом выходов индуктивных контуров с соответствующими входами блока преобразования сигналов позволяют максимально снизить влияние электромагнитных помех на показания аппаратуры за счет возможности управления уровнем сигнала и помех на выходе каждого из индуктивных контуров.
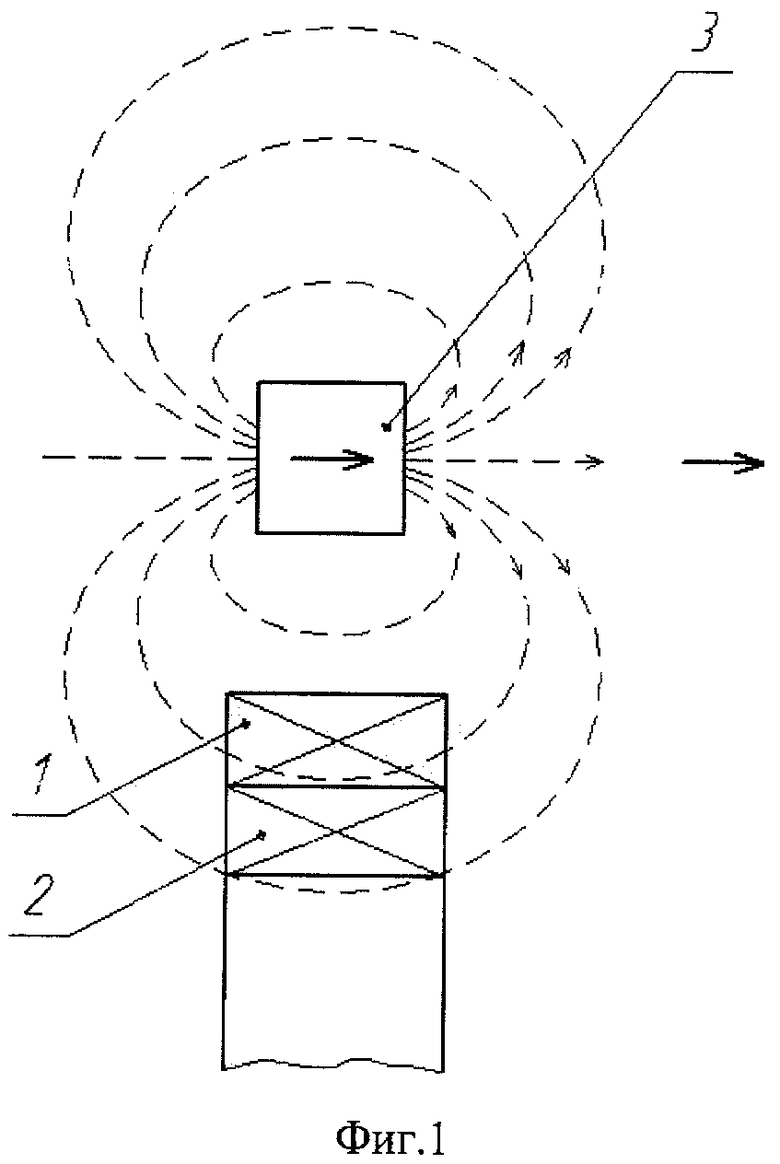
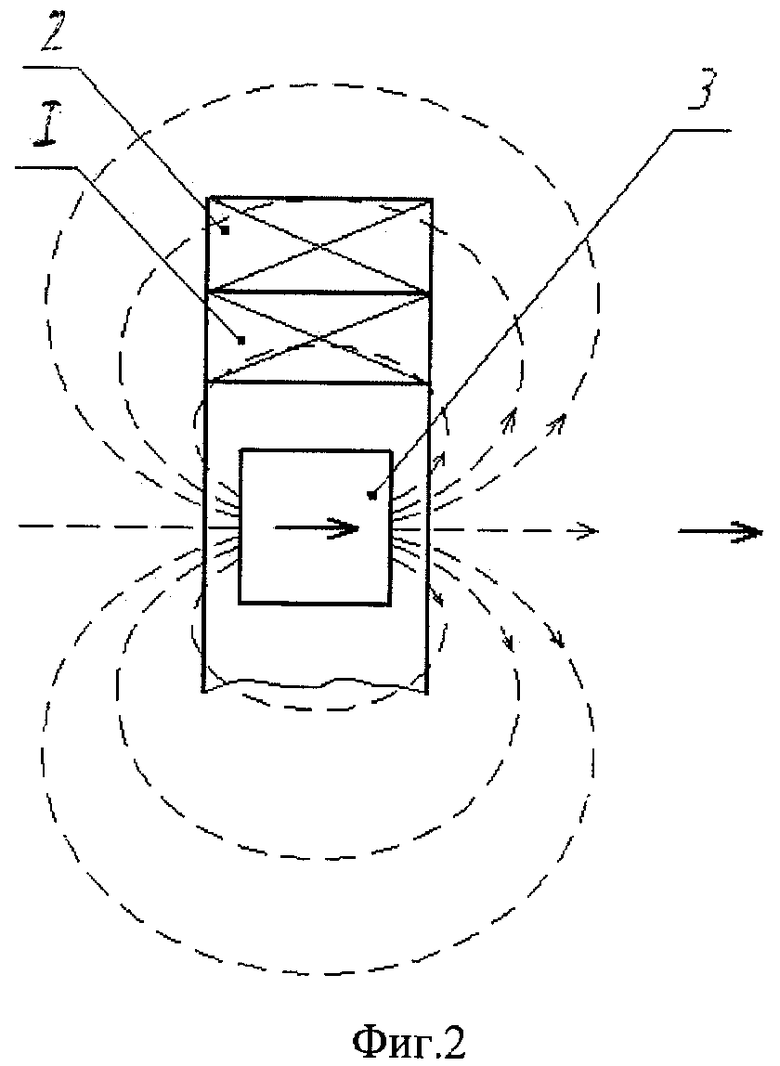
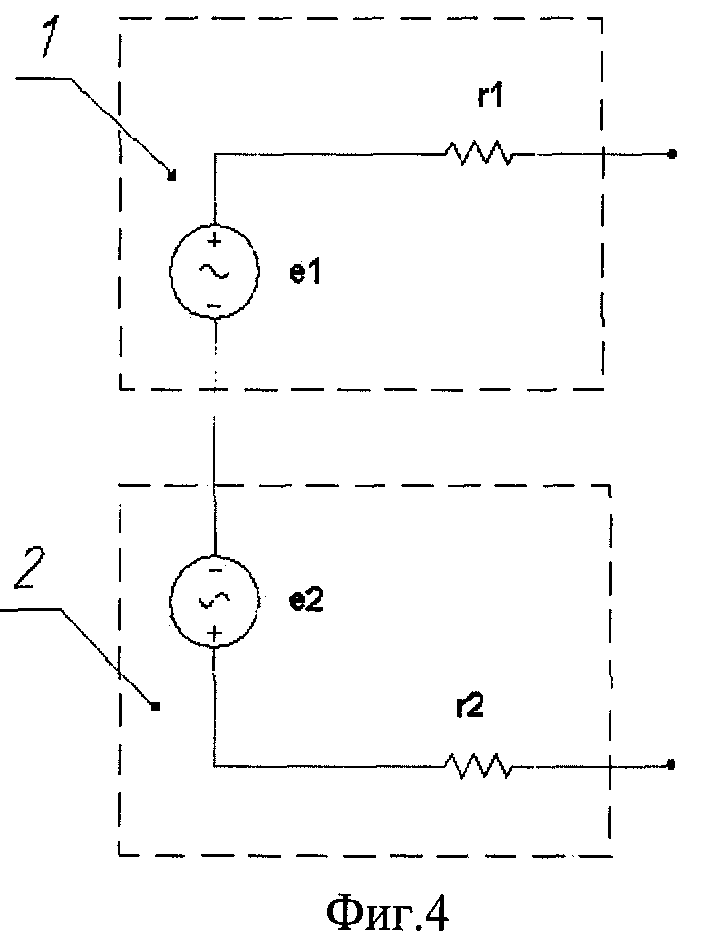
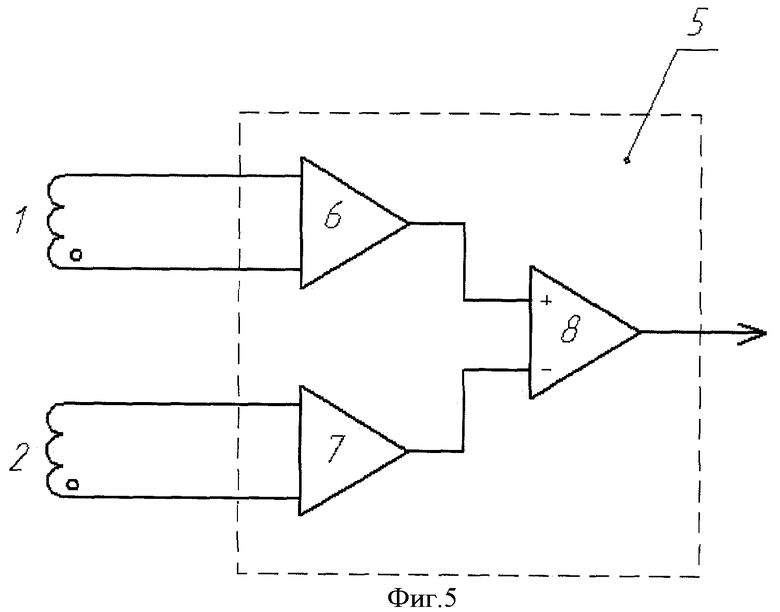
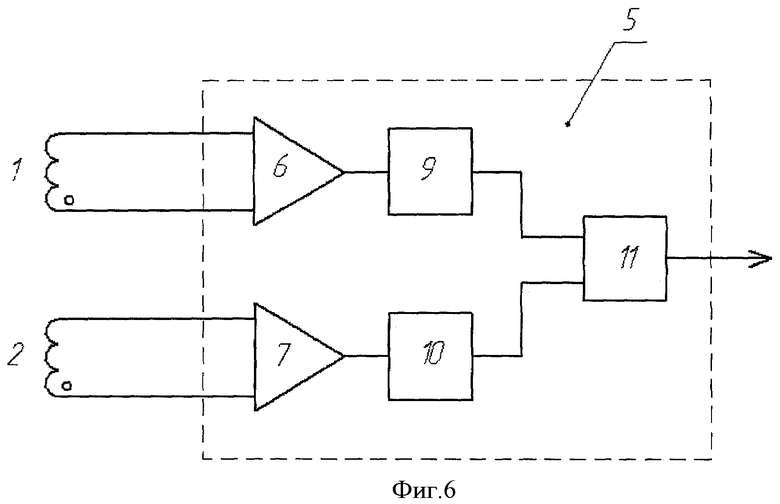
Изобретение поясняется чертежами, где на фиг.1 показано положение индуктивных контуров и источника магнитного поля при перемещении последнего с внешней стороны индуктивных контуров; на фиг.2 - то же, при перемещении источника магнитного поля внутри индуктивных контуров; на фиг.3 - расположение ферромагнитной пластины между индуктивными контурами; на фиг.4 - схема соединения индуктивных контуров по первому варианту датчика; на фиг.5, 6 - схема соединения индуктивных контуров с блоком преобразования сигналов с индуктивных контуров (в виде аналоговой или цифровой схемы соответственно) по второму варианту датчика.
Датчик положения объекта, движущегося относительно другого объекта, содержит установленный, например, на движущемся объекте (объект не показан) источник магнитного поля в виде постоянного магнита 3 с намагниченностью, совпадающей с направлением перемещения магнита (показаны стрелками). Пунктирными линиями на фиг.1 показаны силовые линии магнитного поля магнита со стороны индуктивных контуров. Преобразователь магнитного поля в виде двух индуктивных контуров, установленных, в данном примере, на неподвижном объекте (фиг.1, объект для упрощения чертежа не показан) - первый (основной, наружный) контур 1 и второй (вспомогательный, внутренний) контур 2, установленный со стороны боковой поверхности первого контура 1, наиболее удаленной от источника магнитного поля 3.
Постоянный магнит 3 может перемещаться с движущимся объектом с внешней стороны или внутри индуктивных контуров (фиг.1 или 2 соответственно).
Между первым 1 и вторым контуром 2 может располагаться ферромагнитная пластина 4 (одна или несколько по длине межконтурного пространства, фиг.3). Число витков первого и второго индуктивных контуров может быть одинаковым.
По первому варианту датчика индуктивные контуры 1 и 2 соединены последовательно-встречно (фиг.4). На фигуре они представлены источниками э.д.с. e1 и е2 и соответствующими внутренними сопротивлениями r1 и r2.
По второму варианту индуктивные контуры 1 и 2 (фиг.5, 6) соединены с блоком 5 преобразования сигналов, обеспечивающим снижение уровня помех на выходе датчика, который может быть выполнен в виде аналоговой (фиг.5) или цифровой (фиг.6) схемы преобразования.
Аналоговая схема состоит из предусилителей 6 и 7, регулирующих чувствительность каждого индуктивного контура, и дифференциального усилителя 8.
Цифровая схема содержит предусилители 6 и 7, соединенные через аналого-цифровые преобразователи (АЦП) 9 и 10 с вычислительным устройством 11.
Устройство работает следующим образом. При перемещении постоянного магнита 3 (фиг.1) вместе с движущимся объектом вблизи индуктивных контуров 1 и 2 в последних наводятся переменные э.д.с. e1 и е2. При последовательно-встречном соединении контуров (фиг.4) на их выводах появляется э.д.с. е=e1-е2, являющаяся полезным сигналом датчика. Наряду с этим в контурах 1 и 2 появляются паразитные э.д.с. в виде различных электромагнитных помех, в частности помехи промышленной частоты.
Благодаря тому что близкорасположенные друг к другу индуктивные контуры 1 и 2 практически находятся в поле однородных помех, а потокосцепления контуров с магнитным полем постоянного магнита 3 существенно различаются, появляется возможность полностью или частично компенсировать помехи при сохранении достаточно высокого уровня полезного сигнала за счет вычитания э.д.с. контуров (непосредственно, фиг.4, либо с дополнительным преобразованием напряжений, фиг.5, 6). Например, при одинаковом числе витков контуров (фиг.1) потокосцепление контура 1, расположенного ближе к источнику магнитного поля, больше потокосцепления контура 2, при этом соотношение сигнал/помеха снижается по сравнению с любым из одиночных контуров 1 и 2.
Максимальное подавление электромагнитных помех обеспечивается выбором одинаковых потокосцеплений первого (основного) ψ1 и второго (дополнительного) ψ2 контуров датчика, т.е. при условии ψ1=ψ2, где ψ1=Ф1N1=µ0B1S1N1, ψ2=Ф2N2=µ0B2S2N2, µ0 - магнитная постоянная, Ф1 и Ф2 - магнитный поток, B1 и В2 - средняя по сечению магнитная индукция, S1 и S2 - площадь поперечного сечения, N1 и N2 - число витков первого и второго контуров соответственно. При пространственно однородных в пределах датчика электромагнитных помехах (B1=В2) условием максимального подавления помех является равенство S1N1=S2N2, или N2=S1N1/S2. Поскольку сечения близкорасположенных контуров, особенно контуров большого диаметра, практически одинаковы, то достаточно большого подавления помех можно достичь, выбирая число витков контуров одинаковыми, что упрощает изготовление датчика.
Дальнейшего увеличения соотношения сигнал/помеха удается снизить за счет применения ферромагнитной пластины 4 (фиг.3), установленной между индуктивными контурами. Это достигается благодаря тому, что намагниченная под действием источника магнитного поля (постоянного магнита 3) ферромагнитная пластина создает магнитное поле, воздействующее на индуктивные контуры 1 и 2 (силовые линии магнитного поля ферромагнитной пластины 4 на фиг.3 показаны пунктиром). При этом суммарный (от постоянного магнита 3, фиг.1, и пластины 4, фиг.3) магнитный поток, охватывающий контур 1, увеличивается, а для контура 2 - уменьшается.
Преобразование э.д.с. e1 и e2 индуктивных контуров с помощью блока 5 (фиг.5, 6) позволяет снизить уровень помех на выходе датчика при различном (в частности, неизвестном) числе витков индуктивных контуров 1 и 2. В аналоговой схеме (фиг.5) это обеспечивается за счет выбора соответствующих коэффициентов усиления сигнала предусилителей 6 и 7 с получением на выходе дифференциального усилителя 8 полезного сигнала с максимальным отношением сигнал/помеха. В цифровой схеме (фиг.6) сигналы с контуров 1 и 2, прошедшие через предусилители 6, 7 и АЦП 9, 10, поступают на вычислительное устройство 11, где производится умножение каждого из них на соответствующий коэффициент и вычисление разности полученных чисел. Коэффициенты преобразования в обеих схемах подбираются эмпирически исходя из получения на выходе устройств максимального отношения сигнал/помеха.
Предлагаемое изобретение может быть применено также для точного определения скорости движения различных объектов, перемещающихся относительно основания. Для этого на основании или на объекте устанавливаются два или более датчиков положения на заданных расстояниях (базах) друг от друга в направлении движения. Скорость объекта (усредненное значение на заданной базе) определяется расстоянием между датчиками и временем прохождения объекта от одного датчика к другому.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2339957C2 |
| ДАТЧИК ПОЛОЖЕНИЯ ОБЪЕКТА | 2008 |
|
RU2370777C1 |
| Преобразователь для измерения остаточной магнитной индукции движущихся поперечно намагниченных постоянных магнитов | 1990 |
|
SU1800412A1 |
| Преобразователь для бесконтактной передачи сигналов постоянного тока с вращающегося объекта | 1981 |
|
SU1017927A1 |
| Преобразователь линейных перемещений | 1980 |
|
SU926521A1 |
| ПАРАМЕТРИЧЕСКИЙ ТРАНСФОРМАТОР | 2024 |
|
RU2829049C1 |
| СЕНСОР НА ПЛОСКОЙ КАТУШКЕ | 2015 |
|
RU2594072C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ФЕРРОМАГНИТНЫХ ПОСТОРОННИХ ТЕЛ, В ЧАСТНОСТИ ДЛЯ ЗАЩИТЫ РАБОЧИХ ОРГАНОВ УБОРОЧНЫХ МАШИН (ВАРИАНТЫ) | 2002 |
|
RU2240574C2 |
| ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2485439C2 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |

Изобретение относится к области измерения параметров движения объектов и может быть применено для определения положения и скорости объекта, движущегося относительно другого объекта (основания). По первому варианту датчик положения объекта, движущегося относительно другого объекта, содержит источник магнитного поля, установленный на одном из объектов, и преобразователь магнитного поля в виде индуктивного контура, установленный на другом объекте. Второй индуктивный контур установлен внутри или снаружи первого контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля, и соединен с первым контуром последовательно-встречно по отношению к магнитному потоку источника магнитного поля. Датчик положения объекта по второму варианту содержит источник магнитного поля, установленный на одном из объектов, преобразователь магнитного поля в виде индуктивного контура, установленный на другом объекте, и блок преобразования сигналов с индуктивных контуров. Второй индуктивный контур установлен внутри или снаружи первого контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля. Изобретение направлено на повышение точности определения положения движущегося объекта. 2 н. и 4 з.п. ф-лы, 6 ил.
1. Датчик положения объекта, движущегося относительно другого объекта, содержащий источник магнитного поля, установленный на одном из объектов, и преобразователь магнитного поля в виде индуктивного контура, установленный на другом объекте, отличающийся тем, что внутри или снаружи первого индуктивного контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля, установлен второй индуктивный контур, соединенный с первым контуром последовательно-встречно по отношению к магнитному потоку источника магнитного поля.
2. Датчик по п.1, отличающийся тем, что число витков N2 второго индуктивного контура выбрано из условия
N2=S1N1/S2,
где S1 и N1 - площадь поперечного сечения и число витков первого контура;
S2 - площадь поперечного сечения второго контура.
3. Датчик по п.1, отличающийся тем, что индуктивные контуры имеют одинаковое число витков.
4. Датчик по п.1, отличающийся тем, что он снабжен одной или несколькими пластинами из ферромагнитного материала, установленными между индуктивными контурами.
5. Датчик положения объекта, движущегося относительно другого объекта, содержащий источник магнитного поля, установленный на одном из объектов, и преобразователь магнитного поля в виде индуктивного контура, установленного на другом объекте, отличающийся тем, что он дополнительно снабжен блоком преобразования сигналов, обеспечивающим снижение уровня помех на выходе датчика, в преобразователе магнитного поля внутри или снаружи первого индуктивного контура со стороны его боковой поверхности, наиболее удаленной от источника магнитного поля, установлен второй индуктивный контур, при этом выходы индуктивных контуров соединены с соответствующими входами блока преобразования сигналов.
6. Датчик по п.5, отличающийся тем, что он снабжен одной или несколькими пластинами из ферромагнитного материала, установленными между индуктивными контурами.
| ДАТЧИК ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2339957C2 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2002 |
|
RU2221988C1 |
| BOGDANOFF D.W | |||
| et al | |||
| Magnetic Detector for Projectiles in Tubes | |||
| AIAA Journal, v.28, №11, 1990, p.1942-1944 | |||
| СПОСОБ ЛЕЧЕНИЯ ОБОСТРЕНИЯ ХРОНИЧЕСКОГО ПАНКРЕАТИТА | 1999 |
|
RU2164154C2 |
| ДАТЧИК ПОЛОЖЕНИЯ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ БЫСТРОДВИЖУЩИХСЯ ТЕЛ | 1999 |
|
RU2193207C2 |
| US 6559632 B1, 06.05.2003 | |||
| JP 2006030177 A, 02.02.2006. | |||

