Изобретение относится к области измерения параметров движения объектов и может быть применено для определения положения и скорости объекта, движущегося относительно основания.
Известен датчик положения быстродвижущихся объектов, выполненных из магнитного материала [1], содержащий источник магнитного поля в виде стержневого постоянного магнита и преобразователь магнитного поля в виде индуктивной катушки с ферромагнитным сердечником, установленные на неподвижном основании со стороны движущегося объекта. При прохождении магнитного объекта вблизи датчика потокосцепление (магнитный поток) в преобразователе магнитного поля изменяется (сначала увеличивается, затем уменьшается), при этом в катушке индуктивности появляется эдс, по которой определяют положение объекта относительно неподвижного основания.
Недостатками известного устройства являются: ограниченная область применения из-за невозможности определения положения объектов, выполненных из немагнитных материалов; низкая точность (или невозможность) определения положения объектов при наличии неконтролируемого их вращения вокруг своей оси в процессе движения, а также низкая точность определения положения объектов, движущихся с малыми скоростями.
Наиболее близким техническим решением (прототипом) является датчик положения объекта (снаряда) [2], содержащий источник магнитного поля в виде кольцевого постоянного магнита, охватывающего объект и имеющего намагниченность вдоль направления движения объекта, и локальный преобразователь магнитного поля в виде катушки индуктивности, установленный в заданном месте неподвижного основания (ствола) со стороны движущегося объекта. Плоскость кольцевого магнита и ось катушки индуктивности перпендикулярны направлению движения объекта. При прохождении объекта вблизи датчика потокосцепление (магнитный поток) в преобразователе магнитного поля изменяется, при этом в катушке индуктивности появляется эдс, по которой определяют положение объекта относительно неподвижного основания.
Недостатками устройства-прототипа являются: низкая точность определения положения движущегося объекта в условиях непостоянства расстояния (зазора) между объектом и основанием из-за нестабильности момента перехода через нуль эдс преобразователя магнитного поля; низкая точность определения положения объекта при малых скоростях его движения из-за снижения чувствительности преобразователя магнитного поля, выполненного на основе катушки индуктивности; ограниченные функциональные возможности датчика из-за невозможности определения положения объекта, периферийная поверхность которого выполнена из магнитного материала (магнитный поток от постоянного магнита замыкается на окружающий магнитный материал и не воздействует на преобразователь магнитного поля).
Предлагаемое изобретение направлено на повышение точности определения положения движущегося объекта и расширение функциональных возможностей датчика.
Указанный технический результат достигается тем, что в датчике положения объекта, движущегося относительно основания, содержащем источник магнитного поля в виде постоянного магнита, установленный у периферийной поверхности объекта со стороны основания, и локальный преобразователь магнитного поля, установленный в заданном месте основания на пути движения объекта, согласно изобретению постоянный магнит выполнен с намагниченностью, перпендикулярной направлению движения объекта.
Кроме того, преобразователь магнитного поля выполнен в виде измерителя магнитного поля, преимущественно с осью чувствительности, параллельной направлению движения объекта, а источник магнитного поля - в виде кольцевого постоянного магнита с радиальной намагниченностью, охватывающего объект, причем плоскость магнита перпендикулярна направлению движения объекта. При этом магнит может быть выполнен, например, составным из отдельных сегментов, расположенных по окружности.
Датчик может быть дополнительно снабжен преобразователем магнитного поля, установленным на основании со стороны, противоположной первому преобразователю магнитного поля, и соединенным с первым преобразователем последовательно-согласно по отношению к магнитному полю кольцевого магнита.
Выполнение постоянного магнита с намагниченностью, перпендикулярной направлению движения объекта, позволяет увеличить точность определения положения движущегося объекта при непостоянстве зазора между объектом и основанием за счет более четкой фиксации момента нахождения центра магнита напротив центра преобразователя магнитного поля. Кроме того, это позволяет расширить функциональные возможности датчика за счет определения положения объектов, имеющих периферийные части из магнитных материалов.
Выполнение преобразователя магнитного поля в виде измерителя магнитного поля повышает точность определения положения объектов, движущихся с малыми скоростями, за счет непосредственного измерения параметров магнитного поля постоянного магнита независимо от скорости перемещения источника поля. При этом выполнение измерителя магнитного поля с осью чувствительности, параллельной направлению движения объекта, повышает точность определения положения объекта за счет более четкой фиксации момента нахождения центра магнита напротив центра измерителя магнитного поля (резкого перехода сигнала измерителя через нуль).
Выполнение постоянного магнита датчика кольцевым с радиальной намагниченностью, охватывающим объект, позволяет расширить функциональные возможности датчика за счет возможности определения положения объектов, имеющих неконтролируемое вращение вокруг оси, параллельной направлению движения. При этом выполнение кольцевого магнита составным из отдельных сегментов, расположенных по окружности, обеспечивает технологичность изготовления датчика.
Применение в датчике второго преобразователя магнитного поля, установленного на основании со стороны, противоположной первому преобразователю магнитного поля, и соединенного с первым преобразователем последовательно-согласно по отношению к магнитному полю кольцевого магнита, позволяет снизить погрешность определения положения объекта, обусловленную непостоянством зазора между движущимся объектом и основанием, а также увеличить чувствительность преобразователя магнитного поля и снизить влияние однородных магнитных полей в месте расположения преобразователей.
Известно техническое решение [3], в котором на объекте (поршне), движущемся относительно неподвижного основания (цилиндра), так же как и в предлагаемом устройстве установлен постоянный магнит с намагниченностью, перпендикулярной направлению движения. Однако данный признак сообщает различные свойства сравниваемым решениям. В предлагаемом устройстве благодаря применению локального преобразователя магнитного поля (катушки индуктивности), расположенного в заданном месте основания, постоянный магнит с намагниченностью, перпендикулярной направлению движения, обеспечивает четкий переход сигнала катушки через нуль в момент нахождения магнита напротив катушки, чем обеспечивается повышение точности определения положения движущегося объекта. В известном же решении катушка индуктивности выполнена распределенной по всей траектории движения поршня, а постоянный магнит предназначен для создания магнитного потока по замкнутому контуру «поршень с расположенным в нем магнитом - катушка - стенка цилиндра - шток». При этом по мере движения поршня потокосцепление с измерительной катушкой увеличивается, что обеспечивает однополярный сигнал (эдс) на выходе катушки, пропорциональный скорости движения поршня. Таким образом, данное устройство, без специальных дополнительных мер по преобразованию эдс измерительной катушки, не обеспечивает определение положения поршня в цилиндре, а выбор направления намагниченности магнита перпендикулярно направлению движения поршня в данном случае не является принципиально необходимым условием работы устройства как измерителя скорости. Это направление определяется лишь местом расположения магнита в указанной магнитной цепи и выбирается из тех или иных конструктивных соображений. Например, магнит может быть расположен не на периферийной части поршня, а выполнен в виде диска с осевой намагниченностью и вмонтирован в шток, являющийся частью магнитной цепи. В этом случае намагниченность магнита будет параллельна направлению движения поршня без ущерба для работоспособности устройства.
Других известных из уровня техники устройств, содержащих существенные отличительные от прототипа признаки, нами не обнаружено, поэтому считаем, что предлагаемый датчик положения объекта соответствует критерию изобретения «изобретательский уровень».
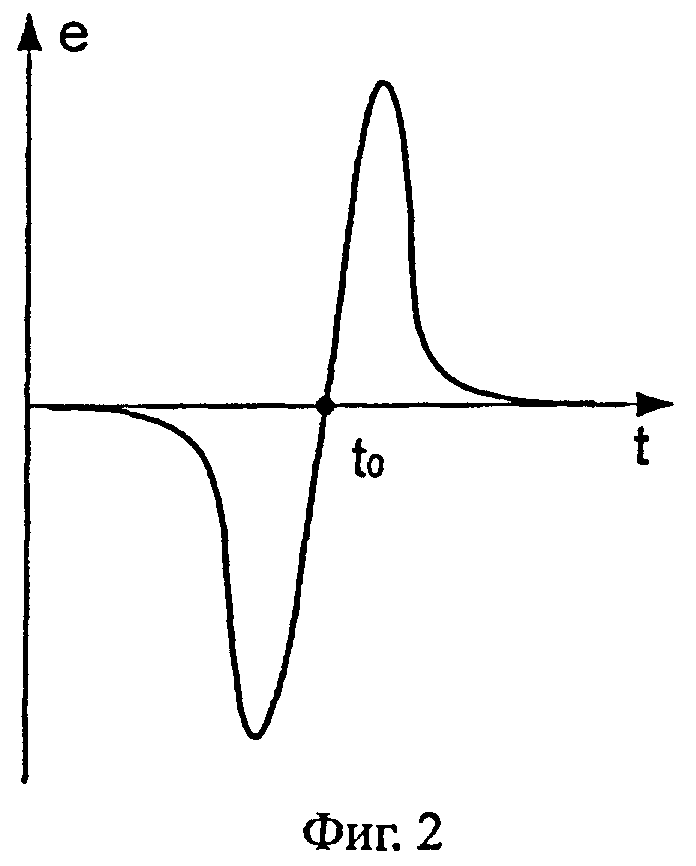
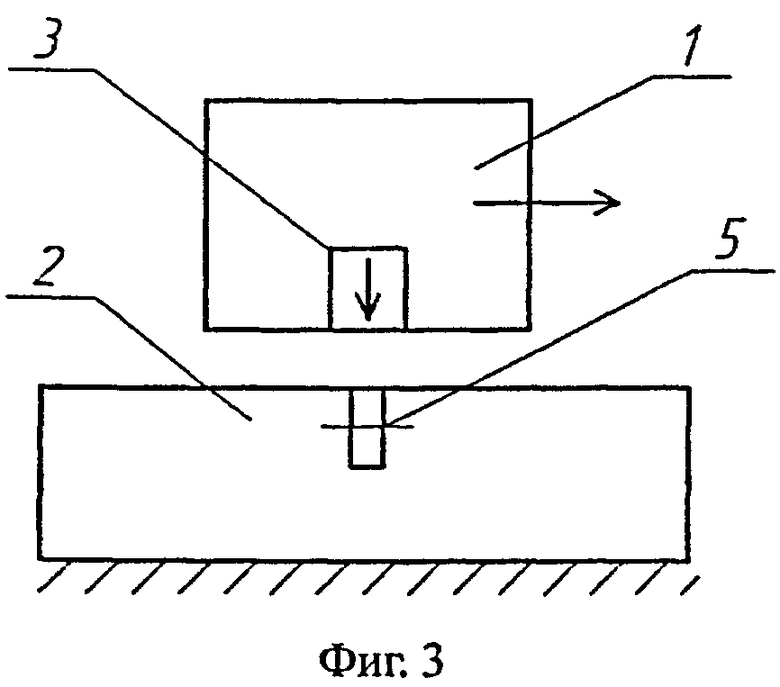
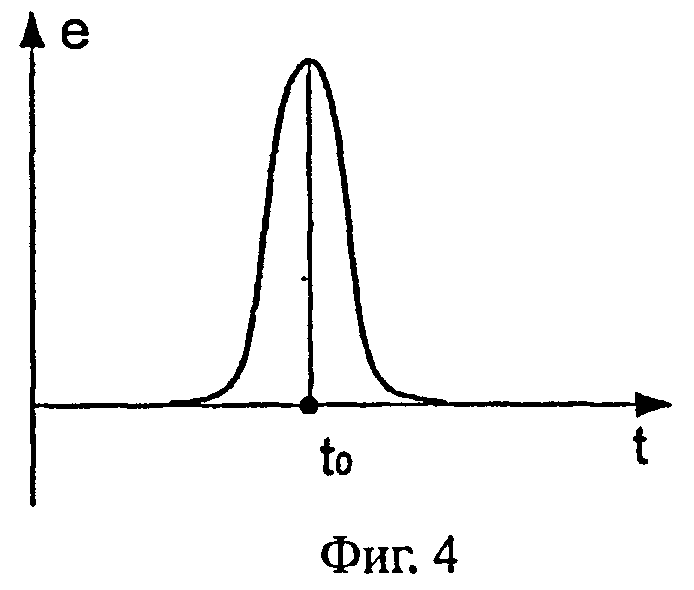
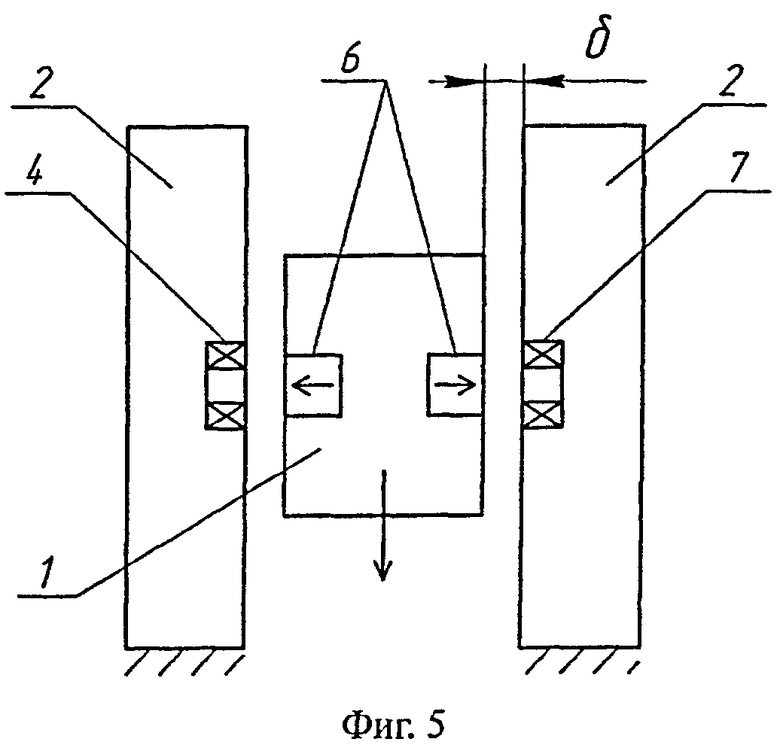
Изобретение поясняется чертежами, где на фиг.1 показана общая схема датчика положения движущегося объекта; на фиг.2 - форма сигнала (зависимость эдс е от времени t) преобразователя магнитного поля; на фиг.3 - датчик с измерителем магнитного поля; на фиг.4 - форма сигнала измерителя магнитного поля с осью чувствительности, перпендикулярной направлению движения объекта; на фиг.5 - схема датчика движения объекта с возможным вращением вокруг оси, параллельной направлению движения.
Датчик положения объекта 1 (фиг.1), движущегося относительно основания 2 (направление движения объекта показано стрелкой), содержит источник магнитного поля в виде постоянного магнита 3, установленного на периферийной части объекта 1 со стороны основания 2 (направление намагниченности магнитов на фигурах показано стрелкой). На основании в заданном месте на пути движения объекта (в месте определения его положения) установлен локальный (с размерами в направлении движения объекта, значительно меньшими, чем длина пути движения) преобразователь 4 магнитного поля, например, в виде катушки индуктивности, ось которой перпендикулярна направлению движения объекта. Преобразователь магнитного поля может быть выполнен в виде измерителя 5 магнитного поля (фиг.3), например в виде датчика Холла, ось чувствительности которого параллельна направлению движения объекта. Источник магнитного поля может быть выполнен в виде кольцевого постоянного магнита 6 (фиг.5) с радиальной намагниченностью, охватывающего объект, причем плоскость магнита перпендикулярна направлению движения объекта. При этом датчик может быть снабжен вторым преобразователем 7 магнитного поля (например, катушкой индуктивности, как показано на фиг.5), установленным на основании 2 со стороны, противоположной первому преобразователю 4 магнитного поля, и соединенным с ним последовательно-согласно по отношению к магнитному полю кольцевого магнита 6. Схемы выделения полезного сигнала с преобразователей магнитного поля на фигурах не показаны.
Устройство работает следующим образом. При движении объекта 1 (фиг.1, 3) с расположенным на его периферийной части постоянным магнитом 3 относительно основания (направляющей) 2 (например, неподвижного) в месте расположения преобразователя магнитного поля (катушки индуктивности 4 на фиг.1 или измерителя 5 магнитного поля в виде датчика Холла на фиг.3) возникает переменное магнитное поле. При использовании в качестве преобразователя катушки 4 индуктивности с осью чувствительности, перпендикулярной направлению движения объекта (фиг.1), эдс на выходе катушки имеет вид, показанный на фиг.2. Переход эдс е катушки через нуль соответствует времени t0, когда центр магнита 3 находится напротив центра катушки 4. Пиковые значения эдс в этом случае зависят от скорости движения объекта относительно основания и зазора между ними.
При низких скоростях движения объекта сигнал с катушки индуктивности становится малым, переход его через нуль нечетким, соответственно снижается точность определения положения объекта относительно основания. В этом случае предпочтительным является использование измерителя (например, датчика Холла) в качестве преобразователя магнитного поля. При этом, если ось чувствительности измерителя перпендикулярна направлению движения объекта, то эдс на выходе измерителя будет иметь вид, показанный на фиг.4. Моменту прохождения центра магнита напротив центра измерителя соответствует максимум эдс е (время t0). Поскольку такая форма сигнала не обеспечивает четкого определения времени t0 (положения объекта, движущегося относительно основания), то предпочтительным является такое расположение измерителя (датчика 5 Холла на фиг.3) в заданном месте основания, при котором его ось чувствительности параллельна направлению движения объекта. В этом случае сигнал с измерителя имеет вид, показанный на фиг.2, т.е. имеет место четкая фиксация времени t0 (более точное определение положения объекта).
При определении положения объектов, имеющих неконтролируемое вращение вокруг оси, параллельной направлению движения (например, объекта 1, перемещающегося сверху вниз в направляющей 2 в виде трубы или стержней, как показано на фиг.5), источник магнитного поля может быть выполнен в виде кольцевого постоянного магнита 6 с радиальной намагниченностью, охватывающего объект, причем плоскость магнита перпендикулярна направлению движения объекта. В этом случае преобразователь магнитного поля 4 будет фиксировать прохождение кольцевого магнита в момент времени t0 (фиг.2) независимо от вращения объекта вокруг оси, параллельной направлению движения объекта. При наличии неконтролируемого зазора δ между объектом и основанием датчик может быть дополнительно снабжен преобразователем магнитного поля (катушкой 7 индуктивности на фиг.5), установленным на основании со стороны, противоположной первому преобразователю магнитного поля (катушке 4), и соединенным с ним последовательно-согласно по отношению к магнитному полю кольцевого магнита. В этом случае суммарный сигнал с преобразователей не будет зависеть от величины зазора δ, поскольку если у одного из преобразователей зазор увеличивается, то у противоположного преобразователя он уменьшается (соответственно на первом преобразователе эдс уменьшается, на втором - увеличивается). Кроме того, увеличивается совокупная чувствительность преобразователей магнитного поля, а также снижается влияние на преобразователи сторонних однородных магнитных полей (как переменных, так и постоянных) в месте их расположения.
Таким образом, предлагаемое изобретение обеспечивает точное определение положения и скорости движения (в случае применения двух или более датчиков по траектории движения) различных объектов, перемещающихся относительно основания.
Источники информации
1. Датчик положения и скорости перемещения быстродвижущихся тел. - Патент РФ №2193207, G01P 3/42.
2. Bogdanoff D.W., Knowlen С., Murakami D. and Stonich I. Magnetic Detector for Projectiles in Tubes. - AIAA Jornal, Vol.28, No.11, 1990, p.p.1942-1944 (прототип).
3. Описание изобретения к патенту Великобритании GB 2164154 А, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2339957C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ | 2009 |
|
RU2398241C1 |
| ДАТЧИК ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2009 |
|
RU2410700C1 |
| Преобразователь для измерения остаточной магнитной индукции движущихся поперечно намагниченных постоянных магнитов | 1990 |
|
SU1800412A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2018 |
|
RU2687169C1 |
| Датчик изменений линейных ускорений | 1990 |
|
SU1777091A1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2016 |
|
RU2629690C1 |
| Датчик обнаружения перфорационных взрывов в скважине | 1990 |
|
SU1719629A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ПРОТЯЖЁННЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2651618C1 |
| СЕНСОР НА ПЛОСКОЙ КАТУШКЕ | 2015 |
|
RU2594072C1 |
Изобретение относится к области измерения параметров движения объектов и может быть применено для определения положения и скорости объекта, движущегося относительно основания. Датчик содержит источник магнитного поля в виде постоянного магнита, выполненного с намагниченностью, перпендикулярной направлению движения объекта, установленный у периферийной поверхности объекта со стороны основания, и локальный преобразователь магнитного поля, установленный в заданном месте основания на пути движения объекта. Преобразователь магнитного поля может быть выполнен в виде измерителя магнитного поля, преимущественно с осью чувствительности, параллельной направлению движения объекта, а источник магнитного поля - в виде кольцевого постоянного магнита с радиальной намагниченностью, охватывающего объект, причем плоскость магнита перпендикулярна направлению движения объекта. Магнит может быть выполнен, например, составным из отдельных сегментов, расположенных по окружности, а датчик может быть снабжен дополнительным преобразователем магнитного поля. Техническим результатом является повышение точности определения положения движущегося объекта и расширение функциональных возможностей датчика. 5 з.п. ф-лы, 5 ил.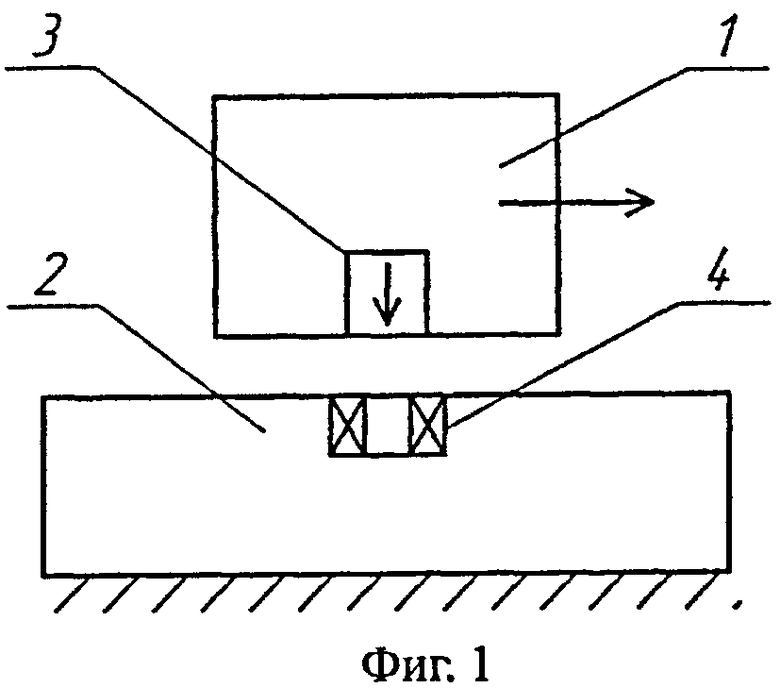
1. Датчик положения объекта, движущегося относительно основания, содержащий источник магнитного поля в виде постоянного магнита, установленный у периферийной поверхности объекта со стороны основания, и локальный преобразователь магнитного поля, установленный в заданном месте основания на пути движения объекта, отличающийся тем, что постоянный магнит выполнен с намагниченностью, перпендикулярной направлению движения объекта.
2. Датчик по п.1, отличающийся тем, что преобразователь магнитного поля выполнен в виде измерителя магнитного поля.
3. Датчик по п.2, отличающийся тем, что ось чувствительности измерителя магнитного поля параллельна направлению движения объекта.
4. Датчик по п.1, отличающийся тем, что источник магнитного поля выполнен в виде охватывающего объект кольцевого постоянного магнита с радиальной намагниченностью, причем плоскость магнита перпендикулярна направлению движения объекта.
5. Датчик по п.4, отличающийся тем, что кольцевой магнит выполнен составным из отдельных сегментов, расположенных по окружности.
6. Датчик по п.4, отличающийся тем, что он дополнительно снабжен преобразователем магнитного поля, установленным на основании со стороны, противоположной первому преобразователю магнитного поля, и соединенным с первым преобразователем последовательно-согласно по отношению к магнитному полю кольцевого магнита.
| СПОСОБ ЛЕЧЕНИЯ ОБОСТРЕНИЯ ХРОНИЧЕСКОГО ПАНКРЕАТИТА | 1999 |
|
RU2164154C2 |
| ДАТЧИК ПОЛОЖЕНИЯ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ БЫСТРОДВИЖУЩИХСЯ ТЕЛ | 1999 |
|
RU2193207C2 |
| BOGDANOFF D.W | |||
| et al | |||
| Magnetic Detector for Projectiles in Tubes | |||
| AIAA JOURNAL, v.28, №11, p.1942-1944 | |||
| 1972 |
|
SU417721A1 | |
| US 6559632 B1, 06.05.2003 | |||
| JP 2006030177 A, 02.02.2006. | |||

