Изобретение относится к геофизическим методам поиска и разведки полезных ископаемых и может быть использовано для поиска и достоверного определения электрофизических параметров локальных объектов, с которыми пространственно связаны месторождения полезных ископаемых.
Известен способ геоэлектроразведки, при котором возбуждают электромагнитное поле в геологической среде и регистрируют электромагнитный отклик на зондирующий сигнал системой приемных дипольных датчиков электромагнитного поля (патент RU №2213982, G01V 3/02). Указанные датчики располагают на поверхности зондируемого участка геологического разреза с координатной привязкой по отношению к излучателю зондирующего сигнала в круге диаметром не менее глубины зондирования Zf, в виде двумерной решетки с шагом h≤Zf вдоль и поперек направления ориентации одной из горизонтальных составляющих электрического поля в исследуемой зоне зондирования. При этом датчики ориентируют параллельно направлению горизонтальной составляющей электромагнитного поля. Прием электромагнитного отклика на зондирующий сигнал производят синхронно всеми датчиками. Принятые сигналы разлагают в частотные спектры, спектральные составляющие которых умножают на весовые коэффициенты, полученные из соответствующего выражения. Умноженные значения отдельных спектральных составляющих со всех приемных дипольных датчиков складывают алгебраически и получают результирующий спектр сигнала всей системы. Затем осуществляют обратное преобразование Фурье этого спектра, что является результирующим сигналом электромагнитного отклика всей системы приемных, дипольных датчиков электромагнитного поля. По этому сигналу судят о структуре геологического разреза. Недостатком способа является избыточно сложная система наблюдений, трудность реализации технологии в полевых условиях, а также последующий раздельный анализ одновременно полученных площадных данных, что не позволяет в полной мере количественно учесть неоднородности во вмещающей среде и в итоге ведет к ошибочному прогнозу.
Известен способ 3D морской электроразведки нефтяных месторождений, включающий возбуждение электромагнитного поля, регистрацию сигналов электрического поля на приемных диполях, снятие полученной информации об изменениях электрического поля при возбуждении пород током генераторного диполя, моделирование профиля этих пород и составление прогноза о наличии месторождений (патент РФ №2356070, G01V 3/08). Известный способ предусматривает перемещение генераторного диполя перпендикулярно профилю наблюдений через центр одного из разносов профиля наблюдений, близкого к центру исследуемой площади, формирование площадной системы профилей измерений. По каждому из профилей измерений проводят одномерную инверсию и строят объемную геоэлектрическую модель среды, по аномалиям которой судят о наличии или отсутствии залежей углеводородов. К недостаткам данного способа следует отнести то, что окончательную объемную модель среды строят по результатам одномерной инверсии, которая не учитывает ограниченных размеров неоднородностей, что может приводить к существенному искажению их параметров (глубины расположения и проводимости). Кроме того, способ не учитывает влияние на результаты измерений боковых неоднородностей, что может привести к появлению в построенной геоэлектрической модели ложных аномалий проводимости или к отсутствию в ней существующих, значимых аномалий проводимости, и в конечном итоге - к неверному геофизическому прогнозу.
Известен также способ и электромагнитная система разведки и распознавания полезных ископаемых (патент US 7324899, G01V 3/12). Указанный известный способ электромагнитной разведки предусматривает сбор электромагнитных сигналов с помощью размещенных на исследуемой территории приемников для измерения данных, определение эффективной комплексной проводимости исследуемой среды с использованием 3D-инверсии электромагнитных данных, преобразование этой проводимости в восстановленную модель проводимости как функцию положения и частоты (или времени) с использованием теоретической, многофазной физико-математической модели и определение геометрических параметров выявленных неоднородностей. Данный способ позволяет инвертировать ЭМ данные для получения трехмерной модели проводимости исследуемой среды. Однако в этом способе не предусмотрены целенаправленные действия, обеспечивающие разделение влияния боковых неглубоких неоднородностей, возможно лежащих за пределами исследуемой территории, и глубинных объектов, лежащих внутри исследуемой территории, что может приводить к неверному прогнозу по глубинной структуре среды даже при использовании 3D-инверсии.
Наиболее близким по технической сущности к заявляемому способу является способ геоэлектроразведки, при котором осуществляют выделение вектора сигнала становления электромагнитного поля от объекта поиска, перекрытого неоднородными экранирующими образованиями (авт.св. СССР №1760873, G01V 3/00, прототип). Известный способ основан на корректировке полного вектора электромагнитного поля путем вычитания из него составляющей, связанной с верхней частью разреза, и определения направления на эпицентр подэкранного поискового объекта. Для каждого фиксированного момента времени путем последовательного изменения ориентации горизонтального приемного датчика определяют направление, вдоль которого напряженность поля максимальна. Тогда горизонтальная компонента полного вектора  характеризуется максимальной полученной напряженностью и выбранным направлением. По результатам измерений в нецентральных точках определяют распределение продольной проводимости экранирующих верхней части разреза. Затем для центральной точки моделируют горизонтальную компоненту
характеризуется максимальной полученной напряженностью и выбранным направлением. По результатам измерений в нецентральных точках определяют распределение продольной проводимости экранирующих верхней части разреза. Затем для центральной точки моделируют горизонтальную компоненту  нормального вектора
нормального вектора  , обусловленную экраном верхней части разреза, для всего зарегистрированного диапазона времен. Применяют физическое моделирование с использованием электрофизических моделей, а также математическое моделирование, основанное на расчете распределения вихревых токов в неоднородной проводящей пленке, отражающей особенности строения верхней части разреза. На следующем этапе вводят во всем диапазоне времен коррекцию горизонтальной компоненты полного вектора. Полученный в результате векторного вычитания разностный вектор
, обусловленную экраном верхней части разреза, для всего зарегистрированного диапазона времен. Применяют физическое моделирование с использованием электрофизических моделей, а также математическое моделирование, основанное на расчете распределения вихревых токов в неоднородной проводящей пленке, отражающей особенности строения верхней части разреза. На следующем этапе вводят во всем диапазоне времен коррекцию горизонтальной компоненты полного вектора. Полученный в результате векторного вычитания разностный вектор  расположен в плоскости измерений и отражает скорректированное направление на объект поиска, стабилизируясь с течением времени становления в направлении эпицентра рудного тела. Далее всю установку перемещают в направлении, совпадающем с наиболее стабильным направлением разностного вектора
расположен в плоскости измерений и отражает скорректированное направление на объект поиска, стабилизируясь с течением времени становления в направлении эпицентра рудного тела. Далее всю установку перемещают в направлении, совпадающем с наиболее стабильным направлением разностного вектора  в информационной области времен, т.е. за пределами ранних времен. Перемещения с последующим циклом измерений и обработки повторяют до смены знака разностного вектора. О положении эпицентра рудного тела судят по положению пунктов зондирования, в пределах которых происходит смена знака разностного вектора.
в информационной области времен, т.е. за пределами ранних времен. Перемещения с последующим циклом измерений и обработки повторяют до смены знака разностного вектора. О положении эпицентра рудного тела судят по положению пунктов зондирования, в пределах которых происходит смена знака разностного вектора.
Принципиальным недостатком известного способа является то, что он позволяет локализовать преимущественно наиболее контрастные по проводимости объекты. Однако если в среде присутствуют сразу несколько объектов с сопоставимыми размерами и глубиной залегания, то смена знака разностного вектора может произойти между этими объектами в стороне от их проекции на дневную поверхность. Кроме того, использование физического моделирования и приближенных математических моделей, с одной стороны, затрудняет процесс интерпретации, а с другой стороны, не совсем точно оценивает вклад верхней части разреза во всей информативной временной области проявления поисковых объектов, что может привести к неточной локализации поискового объекта и недостоверности геофизического прогноза.
Задачей изобретения является повышение достоверности геофизического прогноза.
Технический результат изобретения - разделение влияния на результаты измерений боковых и глубинных неоднородностей на базе 3D-инверсии электроразведочных данных, основанной на подборе единой для всех точек измерения геоэлектрической модели с использованием конечноэлементного 3D-моделирования.
Указанный технический результат достигается за счет того, что в способе геоэлектроразведки, включающим возбуждение электромагнитного поля в геологической среде, синхронную регистрацию компонент электромагнитного поля приемными датчиками, определение по результатам базовой системы наблюдений проводимости исследуемой геологической среды, сопоставление измеренных и расчетных значений компонент вторичного электромагнитного поля с построением геоэлектрической модели исследуемой среды, проведение дополнительных измерений по результатам указанного сопоставления, согласно изобретению сопоставление измеренных и расчетных значений компонент вторичного электромагнитного поля с построением геоэлектрической модели исследуемой среды осуществляют путем составления 3D-модели, для которой выполняют 3D-расчет и вычисляют невязку относительно измеренных данных, исключая ложные аномалии проводимости и подбирая 3D-объекты с эпицентрами под точками базовой системы наблюдений, по полученной уточненной 3D-модели определяют расположение аномалий проводимости в целевых горизонтах, после чего по профилям, проходящим через центры указанных аномалий проводимости, проводят указанные дополнительные измерения, по результатам которых определяют невязку по указанным дополнительным профилям для указанной уточненной 3D-модели, которую корректируют по уровню полученной невязки, в результате чего подтверждают или опровергают наличие аномалий проводимости в целевом горизонте, после чего определяют параметры всех выявленных аномалий проводимости, как с использованием данных базовой системы наблюдений, так и с использованием дополнительных измерений, оказывающих значимое влияние на временах проявления целевых объектов в точках базовой системы наблюдений или в точках дополнительных измерений, оценивают поперечный размер указанных аномалий проводимости и в случае его значимого влияния на временах, соответствующих проявлению целевых объектов в точках базовой системы наблюдений и/или в точках дополнительной системы наблюдений, выполняют измерения по профилям, проходящим через центры этих аномалий проводимости, после чего, используя данные полученной системы наблюдений, включающей базовую систему наблюдений и выполненные дополнительные профили измерений, выполняют 3D-инверсию, по результатам которой получают окончательную геоэлектрическую 3D-модель исследуемой среды, по которой определяют геометрические параметры, проводимость и местоположение аномалий проводимости в целевом горизонте.
Преимущественно указанные дополнительные измерения выполняют до тех пор, пока не будет оконтурены аномалии проводимости в целевом горизонте, выделенные под точками базовой системы наблюдений, или до тех пор, пока не будут оконтурены аномалии проводимости в верхних относительно целевого горизонтах, выделяемые под точками проводимых соответствующих дополнительных измерений.
При этом дополнительные измерения осуществляют с изменением местоположения приемников без изменения положения источников возбуждения, а также с изменением местоположения как приемников, так и источников возбуждения.
Базовая система наблюдений может быть профильной с соосными зондированиями или площадной с соосными зондированиями.
Базовая система наблюдений может быть также профильной с многоразносными зондированиями, выполняемыми вдоль одного направления или профильно-площадной вдоль нескольких квазиортоганальных направлений или вдоль нескольких параллельных или радиальных направлений.
Базовая система наблюдений может быть также площадной с многоразносными зондированиями, выполняемыми по регулярной сети наблюдений в пределах исследуемой площади вдоль нескольких параллельных или радиальных направлений или по произвольной нерегулярной сети наблюдений.
Указанный технический результат достигается также тем, что возбуждение осуществляют петлевым источником, а измерения - с помощью индукционных приемных датчиков, при расположении источника возбуждения и приемных датчиков как в одной плоскости, так и в плоскостях, расположенных на разных высотных уровнях относительно глубины залегания поискового объекта.
Кроме того, возбуждение может осуществляться источником в виде гальванически заземленной горизонтальной линии, а измерения - с помощью гальванически заземленных линий, сонаправленных с источником возбуждения.
Возбуждение осуществляют также источником в виде вертикальной электрической линии или ее аналогов, при этом выполняют измерения либо с использованием индукционных приемных датчиков, либо с использованием гальванически заземленных линий.
При возбуждении электромагнитного поля петлевым источником или источником в виде гальванически заземленной горизонтальной линии, или в виде вертикальной электрической линии, или ее аналогов выполняют измерения 3-х компонент магнитного поля и 2-х горизонтальных компонент электрического поля.
Кроме того, для осуществления способа возможно измерение магнитотеллурического поля земли (магнитотеллурические зондирования) путем измерения 3-х компонент магнитного поля и 2-х горизонтальных компонент электрического поля.
Изобретение поясняется чертежами:
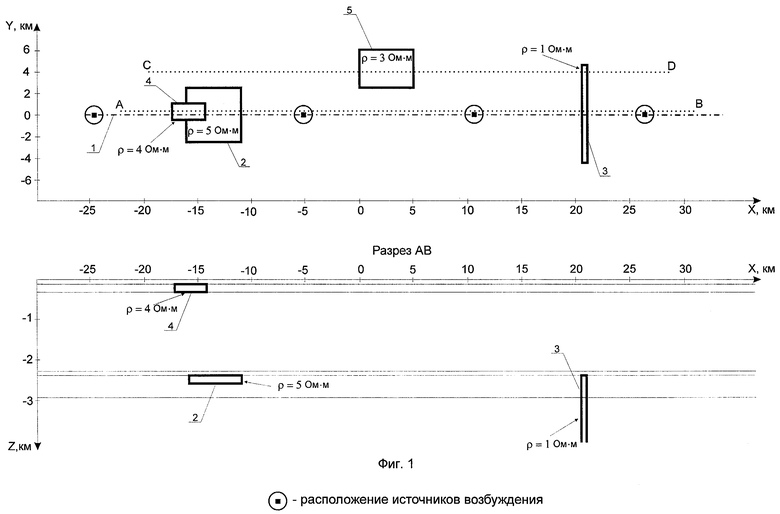
фиг.1 - поисковая геоэлектрическая модель в плане, базовая система наблюдений и разрез по линии АВ, совпадающей с базовой системой наблюдений;
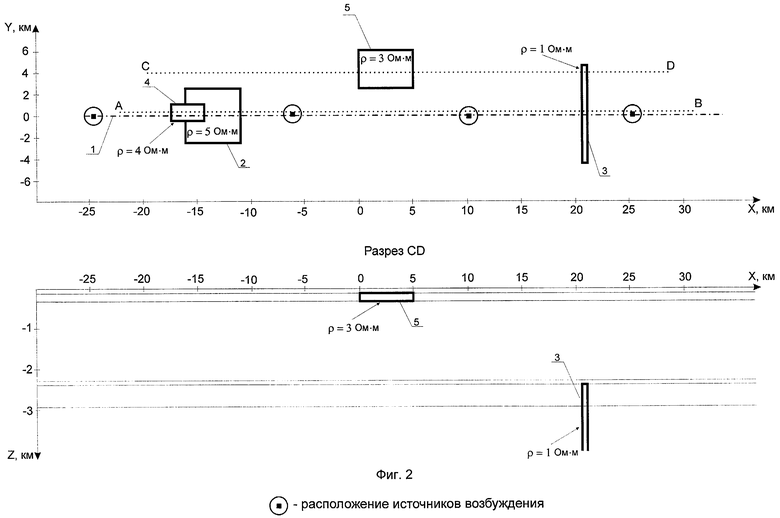
фиг.2 - поисковая геоэлектрическая модель в плане, базовая система наблюдений и разрез по линии CD, параллельной базовой системе наблюдений на расстоянии 4 км;
фиг.3 - результаты 1D-инверсии для измерений вдоль базовой системы наблюдений (фиг.1 - фиг.2) и график суммарной проводимости, построенный по результатам 1D-инверсии;
фиг.4 - предварительная 3D-модель, построенная по результатам 1D-инверсии (фиг.3);
фиг.5 - невязка для предварительной 3D-модели, построенной по результатам 1D-инверсии (фиг.4);
фиг.6 - результаты первичной 3D-инверсии вдоль базовой системы наблюдений;
фиг.7 - невязка для уточненной 3D-модели, построенной в результате 3D-инверсии вдоль базовой системы наблюдений (фиг.6);
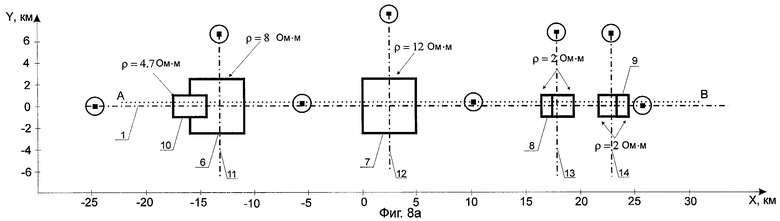
фиг.8а - система наблюдений с профилями 11-14 дополнительных измерений, фиг.8б - невязка вдоль указанных дополнительных профилей для уточненной 3D-модели (фиг.6), полученной в результате первичной 3D-инверсии;
фиг.9 - влияние поперечного размера неоднородности, выявленной под точками дополнительного профиля 12, на регистрируемые сигналы в точках базовой системы наблюдений и положение следующего дополнительного профиля;
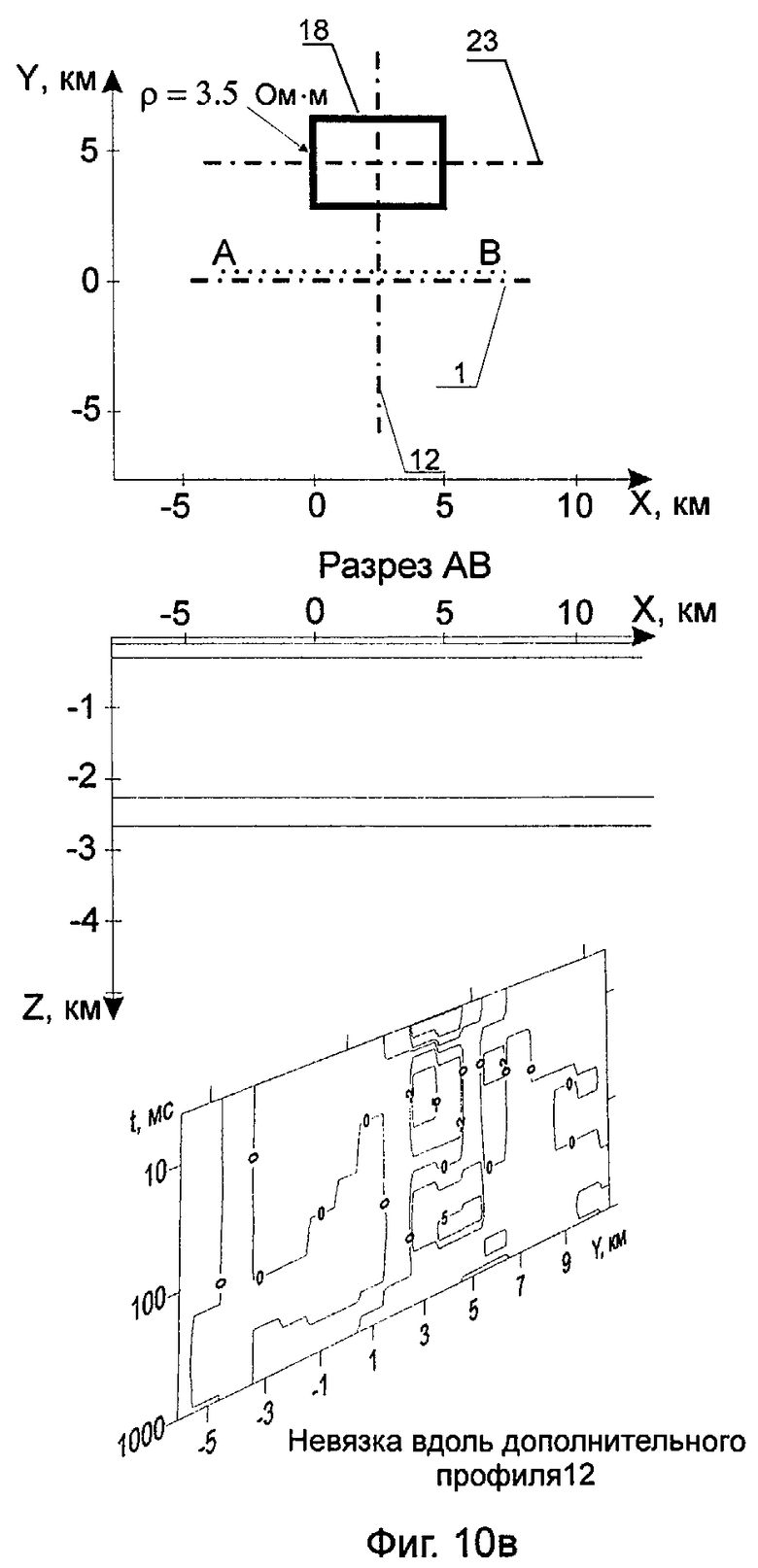
фиг.10а - фиг.10в - невязка вдоль дополнительного профиля 12 для геоэлектрических моделей, полученных на различных этапах проведения работ и инверсии данных;
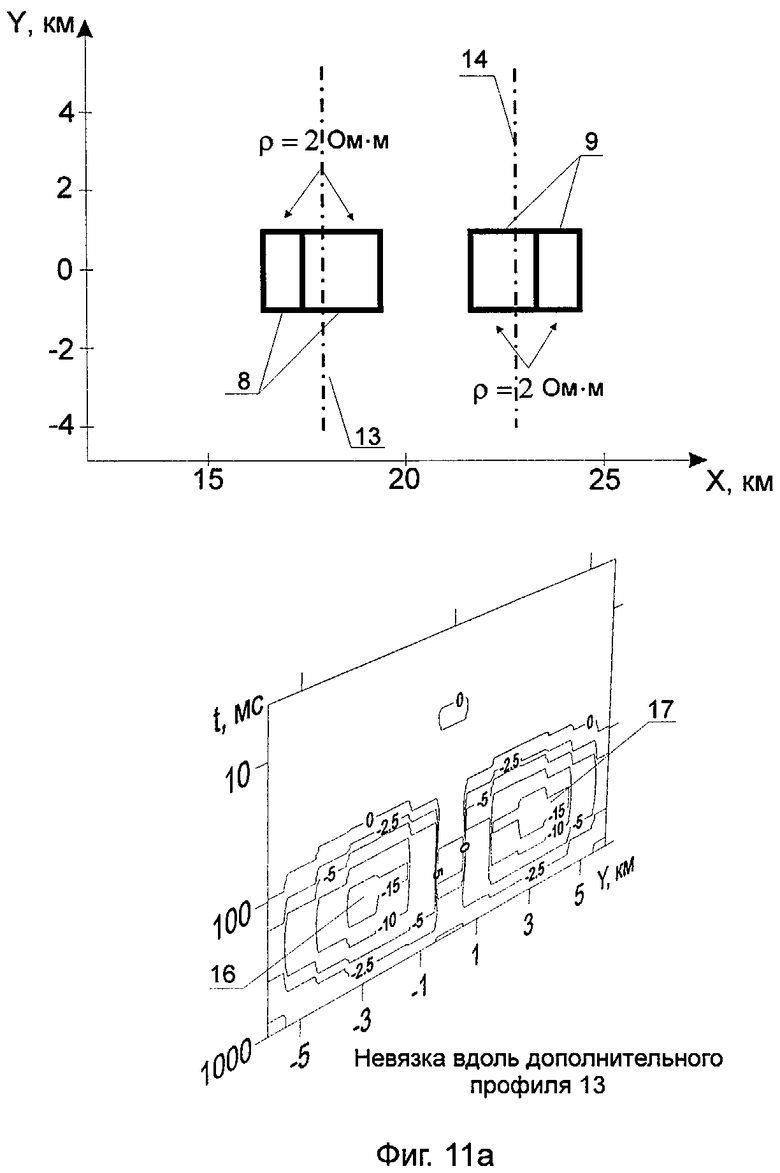
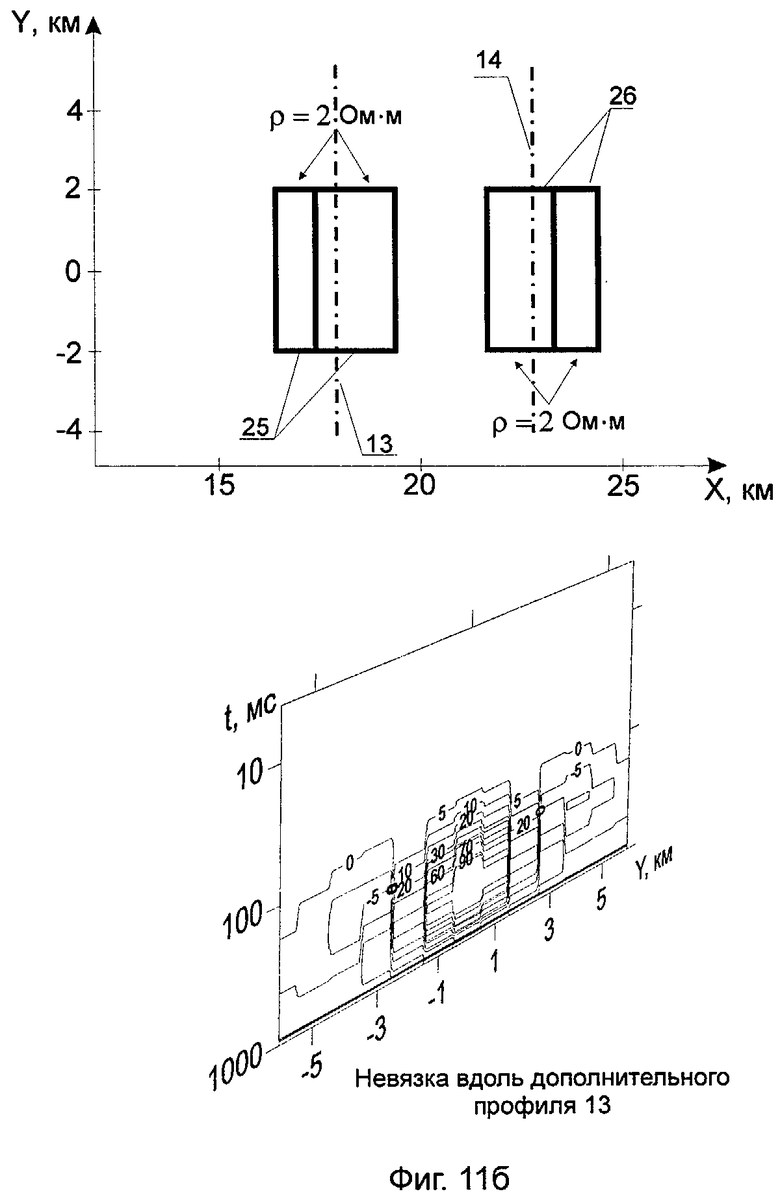
фиг.11a - фиг.11б - невязка вдоль дополнительного профиля 13 для геоэлектрических моделей, полученных на различных этапах проведения работ и инверсии данных;
фиг.12 - построенная окончательная система наблюдений, включающая базовую систему наблюдений и все дополнительные измерения.
Способ согласно изобретению осуществляется в следующей последовательности операций.
1. В исследуемой геологической среде возбуждают электромагнитное поле и системой приемных датчиков, размещаемых на поверхности исследуемой среды по базовой системе наблюдений (фиг.1 - фиг.2), осуществляют синхронную регистрацию компонент электромагнитного поля приемными датчиками. Токи в геологической среде возбуждаются либо с использованием петлевого источника, либо с использованием горизонтальной электрической линии, либо с использованием вертикальной электрической линии, либо ее аналогов, либо магнитотеллурическими токами. Приемные датчики могут быть либо индукционными, либо гальванически заземленными (токовая линия MN), либо может быть использована многокомпонентная регистрация поля с измерением 3-х компонент магнитного поля и 2-х горизонтальных компонент электрического поля. При этом источник возбуждения и приемные датчики могут быть расположены как в одной, так и в разных плоскостях, то есть на разных высотных уровнях относительно глубины залегания поискового объекта. Базовая система наблюдений - система наблюдений, используемая на начальном этапе проведения работ, под точками которой требуется восстановить проводимость в заданном целевом горизонте. Базовая система наблюдений может представлять собой как одиночный профиль (фиг.1 - фиг.2), так и быть профильно-площадной или площадной. При этом измерения в каждой точке профиля или площади могут быть либо соосными, либо многоразносными вдоль одного направления, либо многоразносными в нескольких квазиортогональных, или параллельных, или радиальных направлениях, либо многоразносными, выполняемыми по регулярной сети наблюдений в пределах исследуемой площади вдоль нескольких параллельных или радиальных направлениий или по произвольной нерегулярной сети наблюдений. На фиг.1-2 показан также пример поисковой геоэлектрической модели, для которой по синтетическим данным будет продемонстрирована последовательность действий согласно изобретению. Поисковая геоэлектрическая модель с точками базовой системы наблюдений 1 включает в себя изометрический целевой объект 2, вытянутый целевой объект 3, объект-помеху 4 под точками базовой системы наблюдений и объект-помеху 5, являющийся боковым к точкам базовой системы наблюдений.
2. Для данных, полученных в точках базовой системы наблюдений, выполняют первичную 3D-инверсию - получают геоэлектрическую 3D-модель путем следующей последовательности действий:
2.1. Выполняют 1D-инверсию под каждой точкой базовой системы наблюдений (фиг.3) - определяют электропроводность среды под каждой точной измерения путем подбора в рамках горизонтально-слоистой модели (для каждого положения источника независимо от других его положений).
2.2. Составляют предварительную 3D-модель с использованием «блок - столбцов» под каждой точкой измерения, взятых из результатов 1D-инверсии. «Блок - столбцы» под каждой точкой измерения - набор трехмерных объектов, расположенных друг над другом и имеющих одинаковый размер, равный области влияния соответствующей точки измерения (определяется по выносным зондированиям и расстояниям до соседних точек). Объединение «блок - столбцов» в 3D-модель осуществляют по критерию близости параметров слоистых сред (удельного сопротивления и толщин слоев) в соседних «блок - столбцах». Составленная предварительная 3D-модель показана на фиг.4.
2.3. Выполняют 3D-расчет по составленной предварительной геоэлектрической модели (фиг.4) электромагнитного поля и полученные расчетные кривые сопоставляют с измеренными данными - вычисляют невязку (фиг.5).
2.4. Исключают ложные неоднородности (аномалии проводимости), начиная с некоторых глубин (ложные неоднородности - части «блок - столбцов», взятые из результатов 1D-инверсии и не вносящие значимый вклад в регистрируемый сигнал).
2.5. Начиная с некоторых глубин, подбирают преимущественно изометричные 3D-объекты в виде, например, параллелепипеидальных неоднородностей с эпицентром под точками базовой системы наблюдений, определяя их глубину, проводимость и местоположение в плане - получают уточненную 3D-модель, которая показана на фиг.6. Невязка, вычисленная для данной 3D-модели, показана на фиг.7.
В результате описанной последовательности действий 2.1-2.5 определяют местоположения аномалий проводимости (значимых изменений проводимости), в том числе и «кажущихся» («кажущиеся» аномалии проводимости - аномалии в проводимости геоэлектрической среды, полученные в результате первичной 3D-инверсии без учета влияния боковых объектов), в целевых горизонтах. На фиг.6 - это объекты, обозначенные как 6, 7, 8 и 9.
3. Выполняют дополнительные измерения через центры аномалий проводимости 6, 7, 8, 9 в целевом горизонте. Дополнительные измерения - измерения по профилю, ортогональному к профилю (или одному из профилей), по которому проводились измерения базовой системы наблюдений. Дополнительные измерения осуществляют с использованием указанных выше для базовой системы наблюдений источников возбуждения и приемников. Наблюдения осуществляют либо только с перемещением приемника, либо с перемещением приемника и источника (для контролируемых источников). Дополнительные измерения выполняют до тех пор, пока не будет оконтурена аномалия проводимости в целевом горизонте, выделенная под точками базовой системы наблюдений, или пока не будет оконтурена аномалия проводимости в других горизонтах, выделенная под точками дополнительных измерений. Профили дополнительных измерений для рассматриваемого примера показаны на фиг.8а и обозначены 11, 12, 13 и 14.
4. Для уточненной 3D-модели, подобранной с использованием базовой системы наблюдений, строят невязку вдоль дополнительных профилей (фиг.8б). По уровню невязки подтверждают (или опровергают) наличие аномалий проводимости в целевом горизонте, выявленных под точками базовой системы наблюдений. Если уровень невязки вдоль дополнительных профилей достаточно высок, как на профилях 12, 13 и 14 (фиг.8), выполняют первичную 3D-инверсию вдоль этих профилей с использованием последовательности действий 2.1-2.5.
Если в процессе подбора вдоль дополнительных профилей были выявлены неоднородности, поперечный размер которых влияет на временах, соответствующих проявлению целевых объектов, в некоторых точках базовой системы наблюдений или в точках дополнительных измерений, то выполняют следующий этап дополнительных измерений, через центры этих неоднородностей, до тех пор, пока они не будут оконтурены. В рассматриваемом примере - это неоднородность 18 или 19 (фиг.9), помещение которой в модель позволяет сократить уровень невязки в области 15 (фиг.8б) вдоль дополнительного профиля 12 (фиг.8а). Неоднородности 18 или 19 в точке 20 дают аномальное поле 21 и 22 соответственно. Таким образом, поперечный размер этой неоднородности (18 или 19) влияет на временах, соответствующих проявлению целевых объектов, в точке 20 базовой системы наблюдений, и поэтому для определения этого размера выполняют дополнительный профиль 23 измерений (фиг.9).
Неоднородность 18 (фиг.9), выявленная в результате дополнительных измерений вдоль дополнительного профиля 12, с размером, уточненным в результате дополнительных измерений вдоль дополнительного профиля 23, опровергает наличие неоднородности 7, выявленной вдоль базовой системы наблюдений до проведения дополнительных измерений (фиг.6). На фиг.10а показана невязка уточненной 3D-модели вдоль дополнительного профиля 12 до подбора неоднородности 18. На фиг.10б показана невязка повторно уточненной 3D-модели вдоль дополнительного профиля 12 после подбора неоднородности 18. Полученный высокий уровень невязки в области 24 свидетельствует об избыточности проводимости в этой области, которая соответствует положению неоднородности 7, тем самым опровергая фактическое ее наличие, т.е. неоднородность 7, выявленная под точками базовой системы наблюдений до проведения первых дополнительных измерений, оказалась ложной. Невязка повторно уточненной 3D-модели вдоль дополнительного профиля 12 после подбора неоднородности 18 и исключения неоднородности 7 показана на фиг.10с.
Наличие неоднородностей 8 и 9, выявленных вдоль базовой системы наблюдений до проведения первых дополнительных измерений, также опровергается, поскольку с учетом измерений вдоль дополнительных профилей 13 и 14 невозможно подобрать соответствующие трехмерные неоднородности с выявленными центрами (фиг.11). Невязки, приведенные на фиг.11, показывают, что для изометрических объектов существенный уровень невязки наблюдается в удаленных точках дополнительных профилей 13 и 14 (фиг.8а, области 16 и 17 - фиг.8б, фиг.11а). Удлинение этих объектов (на фиг.11б - это объекты 25 и 26) вдоль дополнительных профилей 13 и 14 позволяет уменьшить уровень невязки в удаленных точках дополнительных профилей 13 и 14, но увеличивает невязку в центральных точках. Выявленная аномалия (соответствующая вытянутому объекту) может быть параметризована в результате выполнения полной 3D-инверсии по описанному ниже алгоритму.
Наличие неоднородности 6 (фиг.6) подтверждается малым уровнем невязки вдоль дополнительного профиля 11 (фиг.8а - фиг.8б). Более точная его параметризация может быть выполнена после коррекции параметров неоднородности 10 (фиг.6) с использованием дополнительного профиля 22 (фиг.12). На фиг.12 показана полученная система наблюдений, состоящая из точек базовой системы наблюдений и дополнительных измерений.
5. На основе данных, полученных базовой системой наблюдений, и данных, полученных путем всех дополнительных измерений, выполняют окончательную 3D-инверсию по следующему алгоритму:
- Выбор нормального поля (поле вмещающей осредненной горизонтально-слоистой среды, в которую в процессе 3D-инверсии будут помещаться трехмерные неоднородности) по максимальному подобию слоистости для всех разносов;
- Построение аномальных полей (невязки) для каждого положения источника;
- Подбор главных неоднородностей ВЧР последовательно по всем источникам;
- Корректировка результата включением более мелких объектов.
- Построение аномальных полей и локализация более слабых аномалий от глубинных объектов.
Все указанные этапы 3D-инверсии, связанные с 3D-расчетами, выполняют с использованием конечноэлементного 3D-моделирования (высокоточного, с погрешностью не более 1-2% во всем временном диапазоне регистрации сигналов).
Окончательная 3D-инверсия в данном случае - это подбор объемной геоэлектрической модели, единой для всех точек измерений, то есть объемная геоэлектрическая модель, согласно описанной выше последовательности действий и указанного алгоритма, формируется при условии одновременного совпадения всех измеренных и расчетных значений компонент электромагнитного поля. При этом при получении расчетных значений во всех точках измерений используется одна и та же, единая, геоэлектрическая модель.
По результатам окончательной 3D-инверсии, выполняемой по построенной адаптивной системе наблюдений (фиг.12), получают окончательную геоэлектрическую 3D-модель (фиг.12), исследуемой среды, по которой определяют геометрические параметры, проводимость и местоположение аномалий проводимости в целевом горизонте.
Способ, согласно изобретению включающий заявленную совокупность существенных признаков, за счет построения и использования процедур дополнительных измерений с выполнением 3D-инверсии позволяет отбраковать выявленные вдоль базовой системы наблюдений возможно ложные аномалии проводимости в целевых горизонтах. Это, в свою очередь, обеспечивает получение высокодостоверной геоэлектрической 3D-модели, увеличивает точность определения параметров имеющихся аномалий проводимости и в конечном итоге повышает точность геофизического прогноза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ электроразведки с оптимизацией апертуры системы наблюдений | 2017 |
|
RU2645864C1 |
| СПОСОБ ПРОГНОЗА ЕМКОСТНЫХ ПАРАМЕТРОВ И ТИПА ФЛЮИДОНАСЫЩЕНИЯ КОЛЛЕКТОРОВ | 2013 |
|
RU2540216C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ В УСЛОВИЯХ ТЕХНОГЕННОЙ ИНФРАСТРУКТУРЫ | 2013 |
|
RU2528115C1 |
| Способ геоэлектроразведки (варианты) | 2015 |
|
RU2631532C2 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ С ОПТИМИЗАЦИЕЙ СИСТЕМЫ НАБЛЮДЕНИЙ | 2024 |
|
RU2836618C1 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2013 |
|
RU2527322C1 |
| УСТРОЙСТВО СЕЙСМОРАЗВЕДКИ 2D ИЛИ 3D, ЭЛЕКТРОРАЗВЕДКИ И ГИС ДЛЯ ПОВЫШЕНИЯ НАДЕЖНОСТИ КАРТИРОВАНИЯ КРОВЛИ СОЛИ И ДЛЯ ПРОГНОЗА НЕФТЕГАЗОНОСНОСТИ ПОДСОЛЕВЫХ ОТЛОЖЕНИЙ В РАЙОНАХ С РАЗВИТОЙ СОЛЯНОКУПОЛЬНОЙ ТЕКТОНИКОЙ | 2015 |
|
RU2595327C1 |
| Способ проведения совместной инверсии сейсморазведочных и электроразведочных данных | 2020 |
|
RU2772312C1 |
| СПОСОБ ПРОГНОЗА ЭФФЕКТИВНОЙ ЕМКОСТИ КОЛЛЕКТОРОВ НА ОСНОВЕ ПОЛУЧАЕМЫХ ПОЛЯРИЗАЦИОННЫХ ПАРАМЕТРОВ И ПРОВОДИМОСТИ ДЛЯ ВЫБРАННОГО ТИПА СРЕДЫ | 2016 |
|
RU2630852C1 |
| КОМПЛЕКС ДЛЯ ПОИСКОВО-РАЗВЕДОЧНЫХ РАБОТ НА НЕФТЬ И ГАЗ В СЛОЖНОПОСТРОЕННЫХ РАЙОНАХ С РАЗВИТОЙ СОЛЯНОКУПОЛЬНОЙ ТЕКТОНИКОЙ С КАРТИРОВАНИЕМ КРОВЛИ СОЛИ И ПОДСОЛЕВЫХ ОТЛОЖЕНИЙ И КОМПЬЮТЕРНО-ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС (КТК) ДЛЯ НЕГО | 2014 |
|
RU2594112C2 |









Изобретение относится к геофизическим методам поиска и разведки полезных ископаемых. Технический результат: повышение достоверности геофизического прогноза изобретения путем разделения влияния на результаты измерений боковых и глубинных неоднородностей. Сущность: по результатам измерений по базовой системе наблюдений определяют проводимость среды. На базе полученных данных составляют предварительную 3D-модель, для которой выполняют 3D-расчет и вычисляют невязку относительно измеренных данных, исключая ложные неоднородности и подбирая 3D-объекты с эпицентрами под точками базовой системы наблюдений. В результате получают уточненную 3D-модель и определяют расположение аномалий проводимости в целевых горизонтах. По профилям, проходящим через центры выделенных аномалий, проводят дополнительные измерения и определяют невязку для имеющейся уточненной 3D-модели, которую корректируют. В результате подтверждают или опровергают наличие аномалий проводимости в целевом горизонте и определяют ее параметры. Оценивают поперечный размер выявленных аномалий и в случае его значимого влияния выполняют измерения по профилям, проходящим через центры этих аномалий. Используя данные полученной системы наблюдений, включающей базовую систему наблюдений и указанные дополнительные профили, выполняют 3D-инверсию. В результате получают окончательную геоэлектрическую 3D-модель исследуемой среды. 11 з.п. ф-лы, 12 ил.
1. Способ геоэлектроразведки, включающий возбуждение электромагнитного поля в геологической среде, синхронную регистрацию компонент электромагнитного поля приемными датчиками, определение по результатам базовой системы наблюдений проводимости исследуемой геологической среды, сопоставление измеренных и расчетных значений компонент электромагнитного поля с построением геоэлектрической модели исследуемой среды, проведение дополнительных измерений по результатам указанного сопоставления, отличающийся тем, что сопоставление измеренных и расчетных значений компонент вторичного электромагнитного поля с построением геоэлектрической модели исследуемой среды осуществляют путем составления 3D-модели, для которой выполняют 3D-расчет и вычисляют невязку относительно измеренных данных, исключая ложные аномалии проводимости и подбирая 3D-объекты с эпицентрами под точками базовой системы наблюдений, по полученной уточненной 3D-модели определяют расположение аномалий проводимости в целевых горизонтах, после чего по профилям, проходящим через центры указанных аномалий проводимости, проводят указанные дополнительные измерения, по результатам которых определяют невязку по указанным дополнительным профилям для указанной уточненной 3D-модели, которую корректируют по уровню полученной невязки, в результате чего подтверждают или опровергают наличие аномалий проводимости в целевом горизонте, после чего определяют параметры всех выявленных аномалий проводимости, как с использованием данных базовой системы наблюдений, так и с использованием дополнительных измерений, оказывающих значимое влияние на временах проявления целевых объектов в точках базовой системы наблюдений или в точках дополнительных измерений, оценивают поперечный размер указанных аномалий проводимости и, в случае его значимого влияния на временах, соответствующих проявлению целевых объектов в точках базовой системы наблюдений и/или в точках дополнительной системы наблюдений, выполняют измерения дополнительным профилям, проходящим через центры этих аномалий проводимости, после чего, используя данные полученной системы наблюдений, включающей базовую систему и выполненные дополнительные профили измерений выполняют 3D-инверсию, по результатам которой получают окончательную геоэлектрическую 3D-модель исследуемой среды, по которой определяют геометрические параметры, проводимость и местоположение аномалий проводимости в целевом горизонте.
2. Способ по п.1, отличающийся тем, что указанные все дополнительные измерения выполняют до тех пор, пока не будет оконтурены аномалии проводимости в целевом горизонте, выделенные под точками базовой системы наблюдений, или до тех пор, пока не будут оконтурены аномалии проводимости в верхних относительно целевого горизонтах, выделяемые под точками проводимых соответствующих дополнительных измерений.
3. Способ по п.1, отличающийся тем, что дополнительные измерения осуществляют с изменением местоположения приемных датчиков без изменения положения источников возбуждения.
4. Способ по п.1, отличающийся тем, что дополнительные измерения осуществляют с изменением местоположения как приемных датчиков, так и источников возбуждения.
5. Способ по п.1, отличающийся тем, что базовая система наблюдений является профильной с соосными зондированиями или площадной с соосными зондированиями.
6. Способ по п.1, отличающийся тем, что базовая система наблюдений является профильной с многоразносными зондированиями, выполняемыми вдоль одного направления, или профильно-площадной вдоль нескольких квазиортоганальных направлений или вдоль нескольких параллельных или радиальных направлений.
7. Способ по п.1, отличающийся тем, что базовая система наблюдений является площадной с многоразносными зондированиями, выполняемыми по регулярной сети наблюдений в пределах исследуемой площади вдоль нескольких параллельных или радиальных направлений или по произвольной нерегулярной сети наблюдений.
8. Способ по п.1, отличающийся тем, что возбуждение осуществляют петлевым источником, а измерения - с помощью индукционных приемных датчиков, при расположении источника возбуждения и приемных датчиков как в одной плоскости, так и в плоскостях, расположенных на разных высотных уровнях относительно глубины залегания поискового объекта.
9. Способ по п.1, отличающийся тем, что возбуждение осуществляют источником в виде гальванически заземленной горизонтальной линии, а измерения - с помощью гальванически заземленных линий, сонаправленных с источником возбуждения.
10. Способ по п.1, отличающийся тем, что возбуждение осуществляют источником в виде вертикальной электрической линии или ее аналогов, при этом выполняют измерения либо с использованием индукционных приемных датчиков, либо с использованием гальванически заземленных линий.
11. Способ по п.1, отличающийся тем, что возбуждение осуществляют петлевым источником, или источником в виде гальванически заземленной горизонтальной линии, или в виде вертикальной электрической линии или ее аналогов, при этом выполняют измерения 3-х компонент магнитного поля и 2-х горизонтальных компонент электрического поля.
12. Способ по п.1, отличающийся тем, что он включает измерения магнитотеллурического поля земли путем измерения 3-х компонент магнитного поля и 2-х горизонтальных компонент электрического поля.
| СПОСОБ 3D МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2007 |
|
RU2356070C2 |
| US 7324899 B2, 29.01.2008 | |||
| СПОСОБ ПОЛУЧЕНИЯ НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2010 |
|
RU2438430C1 |

