Область изобретения
Изобретение относится к геофизическим методам разведки полезных ископаемых электромагнитными методами с контролируемым источником и может быть использовано для поиска целевых объектов, имеющих электрофизический контраст с вмещающей геологической средой, с которыми пространственно связаны месторождения полезных ископаемых.
Предшествующий уровень техники
Известен способ электромагнитной разведки, в котором осуществляют выделение вектора сигнала становления электромагнитного поля от объекта поиска, перекрытого неоднородными экранирующими образованиями (авторское свидетельство СССР №1760873, G01V3/00). Известный способ основан на корректировке полного вектора электромагнитного поля путем вычитания из него составляющей связанной с верхней частью разреза и определения направления на эпицентр подэкранного поискового объекта. Для каждого фиксированного момента времени путем последовательного изменения ориентации горизонтального приемного датчика определяют направление, вдоль которого напряженность поля максимальна. В этом случае горизонтальная компонента полного вектора  характеризуется максимальной полученной напряженностью и выбранным направлением. По результатам измерений в нецентральных точках определяют распределение продольной проводимости экранирующих верхней части разреза. Затем для центральной точки моделируют горизонтальную компоненту
характеризуется максимальной полученной напряженностью и выбранным направлением. По результатам измерений в нецентральных точках определяют распределение продольной проводимости экранирующих верхней части разреза. Затем для центральной точки моделируют горизонтальную компоненту  нормального вектора
нормального вектора  , обусловленную экраном верхней части разреза, для всего зарегистрированного диапазона времен. Применяют физическое моделирование с использованием электрофизических моделей, а также математическое моделирование, основанное на расчете распределения вихревых токов в неоднородной проводящей пленке, отражающей особенности строения верхней части разреза. На следующем этапе вводят во всем диапазоне времен коррекцию горизонтальной компоненты полного вектора. Полученный в результате векторного вычитания разностный вектор
, обусловленную экраном верхней части разреза, для всего зарегистрированного диапазона времен. Применяют физическое моделирование с использованием электрофизических моделей, а также математическое моделирование, основанное на расчете распределения вихревых токов в неоднородной проводящей пленке, отражающей особенности строения верхней части разреза. На следующем этапе вводят во всем диапазоне времен коррекцию горизонтальной компоненты полного вектора. Полученный в результате векторного вычитания разностный вектор  расположен в плоскости измерений и отражает скорректированное направление на объект поиска, стабилизируясь с течением времени становления в направлении эпицентра рудного тела. Далее всю установку перемещают в направлении, совпадающем с наиболее стабильным направлением разностного вектора в информационной области времен, то есть за пределами ранних времен. Перемещения с последующим циклом измерений и обработки повторяют до смены знака разностного вектора. О положении эпицентра рудного тела судят по положению пунктов зондирования, в пределах которых происходит смена знака разностного вектора.
расположен в плоскости измерений и отражает скорректированное направление на объект поиска, стабилизируясь с течением времени становления в направлении эпицентра рудного тела. Далее всю установку перемещают в направлении, совпадающем с наиболее стабильным направлением разностного вектора в информационной области времен, то есть за пределами ранних времен. Перемещения с последующим циклом измерений и обработки повторяют до смены знака разностного вектора. О положении эпицентра рудного тела судят по положению пунктов зондирования, в пределах которых происходит смена знака разностного вектора.
Принципиальным недостатком такого способа является то, что он позволяет локализовать преимущественно наиболее контрастные по проводимости объекты. Однако если в среде присутствуют сразу несколько объектов с сопоставимыми размерами и глубиной залегания, то смена знака разностного вектора может произойти между этими объектами в стороне от их проекции на дневную поверхность. Кроме того, использование физического моделирования и приближенных математических моделей затрудняет процесс интерпретации и не совсем точно оценивает вклад верхней части разреза во всей информативной временной области проявления поисковых объектов, что может привести к неточной локализации поискового объекта и недостоверности геофизического прогноза.
Известен способ геоэлектроразведки, включающий возбуждение электромагнитного поля в исследуемой геологической среде, синхронную регистрацию компонент электромагнитного поля, определение по результатам базовой системы наблюдений значений проводимости исследуемой геологической среды, сопоставление измеренных и расчетных значений, построение геоэлектрической модели исследуемой среды, проведение дополнительных измерений по результатам указанного сопоставления (патент РФ № 2411549, G01V3/08). При этом сопоставление измеренных и расчетных значений компонент вторичного электромагнитного поля осуществляют путём составления 3D-модели, для которой выполняют 3D-расчёт и вычисляют невязку относительно измеренных данных, исключая ложные аномалии проводимости и подбирая 3D-объекты с эпицентрами под точками базовой системы наблюдений. По полученной уточнённой
3D-модели определяют расположение аномалий проводимости в целевых горизонтах, после чего по профилям, проходящим через центры указанных аномалий проводимости, проводят указанные дополнительные измерения. По результатам определяют невязку по дополнительным профилям для уточнённой 3D-модели, которую корректируют по уровню полученной невязки, в результате чего подтверждают или опровергают наличие аномалий проводимости в целевом горизонте. Далее определяют параметры всех выявленных аномалий проводимости, как с использованием данных базовой системы наблюдений, так и с использованием дополнительных измерений, оказывающих значимое влияние на временах проявления целевых объектов в точках базовой системы наблюдений или в точках дополнительных измерений. Оценивают поперечный размер выявленных аномалий проводимости. В случае его значимого влияния на временах, соответствующих проявлению целевых объектов в точках базовой системы наблюдений и/или в точках дополнительной системы наблюдений, выполняют измерения по профилям, проходящим через центры этих аномалий. Используя электромагнитные данные полученной системы наблюдений, которая включает базовую систему наблюдений и систему дополнительных профилей, выполняют 3D-инверсию, по результатам которой получают окончательную геоэлектрическую 3D-модель исследуемой среды. В результате определяют геометрические параметры, проводимость и местоположение аномалий проводимости в целевом горизонте.
Недостатком такого способа геоэлектроразведки является недостаточная, вследствие отсутствия контроля за латеральным расширением области циркуляции вихревого электромагнитного поля, достоверность реконструкции исследуемой геологической среды и последующего геофизического прогноза, что снижает эффективность геофизических исследований.
Наиболее близким по технической сущности к заявляемому способу является способ геоэлектроразведки с формированием оптимальной апертуры системы наблюдений (патент РФ № 2645864, G01V3/08, прототип), при котором дополнительные измерения компонент электромагнитного поля осуществляют в пределах апертуры наблюдений, которую формируют в виде полосы, каждая точка границ которой по профилю измерений удалена от точек базового профиля по нормали на расстояние, соответствующее латеральному положению максимума плотности тока на временах, соответствующих проектной глубине исследований, в установленных границах апертуры наблюдений проводят измерение компонент ЭМ-поля по которым осуществляют геоэлектрическую реконструкцию геологической среды, относя полученный результат к проекции профиля базовой системы наблюдений.
Недостатком такого способа геоэлектроразведки является неиспользование всех априорных данных о поисковых объектах, а только учет их глубины залегания, а также разделение разреза условно на верхнюю часть разреза с суммарной продольной электрической проводимостью Ѕ1 и целевой горизонт Ѕ2. При этом в реальном разрезе верхняя часть может иметь достаточно сложную структуру, целевой объект может залегать на большой глубине и перекрываться несколькими экранирующими горизонтами. Таким образом, объект не описан полностью, что приводит к снижению достоверности реальных размеров и форм объекта.
Описание фигур
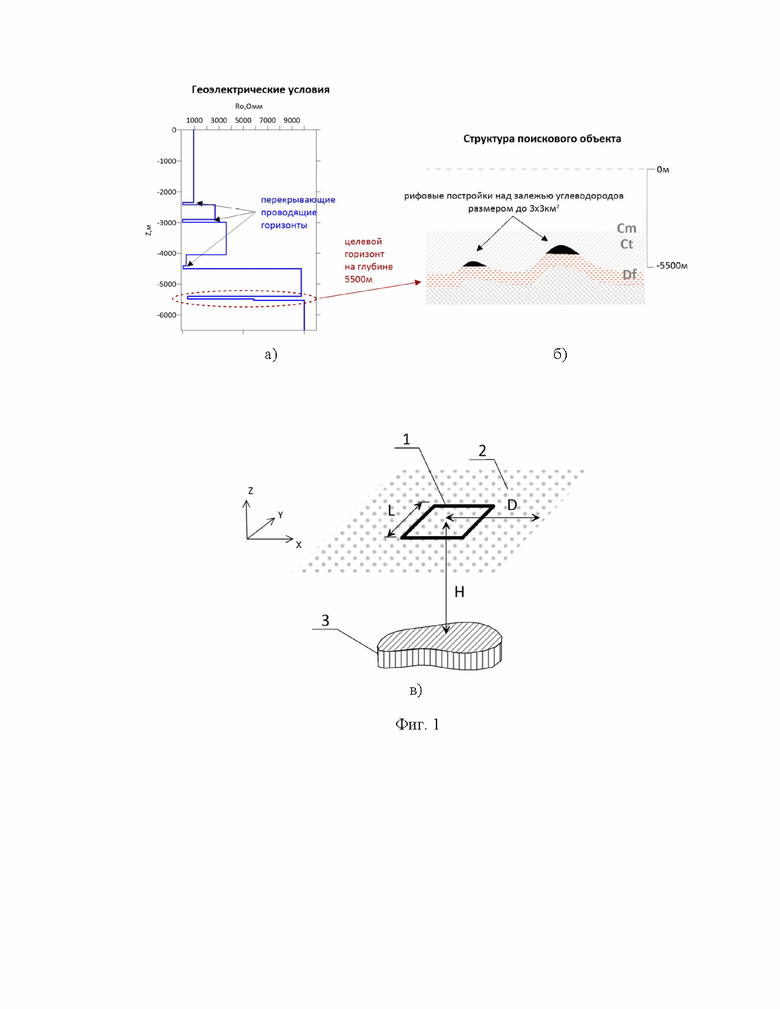
На фиг. 1а приведен пример геоэлектрических условий месторождений Волго-Уральской нефтегазоносной области.
На фиг. 1б схематично показаны рифовые структуры девонского периода.
На фиг. 1в показана апертура системы наблюдений при электромагнитных зондированиях согласно изобретению.
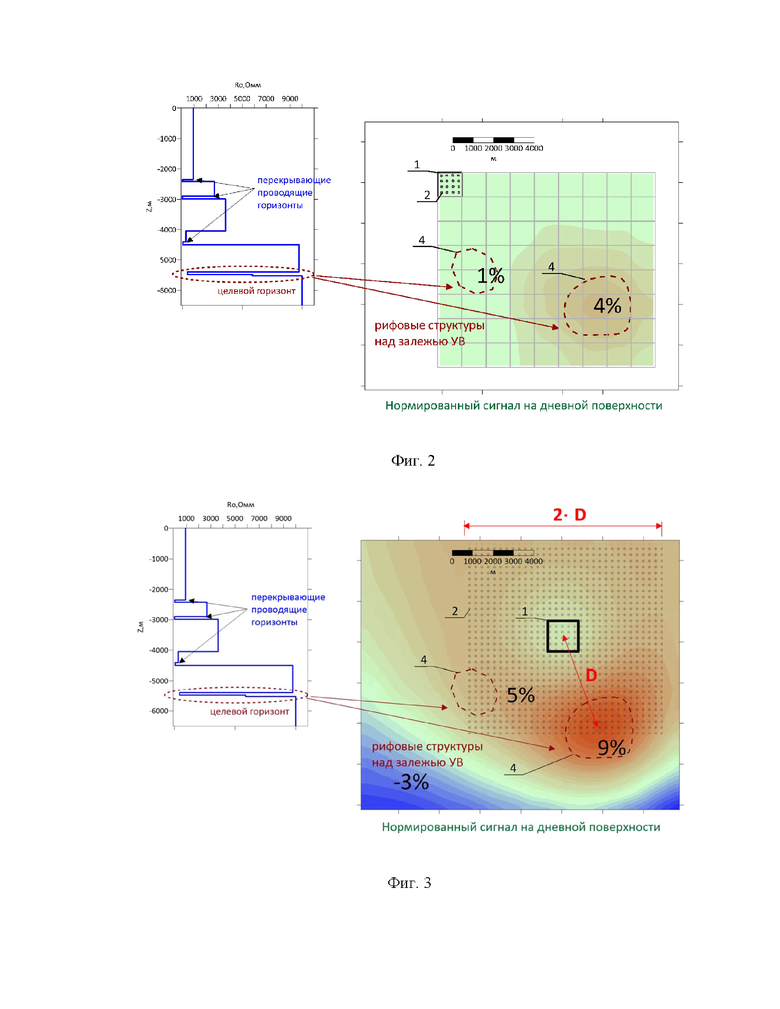
На фиг. 2 показано распределение нормированного сигнала на дневной поверхности полученного в результате моделирования.
На фиг. 3 показано распределение на дневной поверхности нормированного сигнала в момент максимума аномалии от поисковых объектов и система наблюдений на основе петлевого источника, на определенном расстоянии.
Описание изобретения
Задачей настоящего изобретения является повышение достоверности геофизического прогноза, снижение затрат на проведение полевых работ при проведении электромагнитных исследований с контролируемым источником при наличии осложняющих геологических факторов.
Технический результат изобретения – оптимизация системы геофизических наблюдений с учетом априорной информации о целевых объектах, обеспечивающей более точную трехмерную реконструкцию распределения электрической проводимости исследуемой среды, и как следствие – повышение достоверности данных об объекте с возможностью более точного геофизического прогноза.
Указанный технический результат достигается за счет того, что в способе электромагнитной разведки с оптимизацией системы наблюдений, при котором с помощью зафиксированного на поверхности наблюдений источника электромагнитного поля в исследуемой среде возбуждают нестационарное электромагнитное поле, и системой измерителей, расположенной на поверхности земли вблизи и на удалении от проекции источника, измеряют вторичное нестационарное электромагнитное поле вихревых токов, согласно изобретению, максимальный разнос D «источник-измеритель» определяют на основе пространственного распределения максимумов аномалий от поисковых объектов на поверхности земли с использованием стартовой геоэлектрической модели поискового объекта, построенной на основе априорной геологической информации, при этом расположение максимумов аномалии поискового объекта на поверхности земли определяют путем моделирования в области измеряемых значений сигналов вторичного электромагнитного поля, выбирают значение разноса «источник-приемник», соответствующее максимумам относительной аномалии от поискового объекта, по положению максимумов относительной аномалии от поискового объекта определяют размер апертуры для каждого положения источника и расстояние между источниками с получением оптимизированной системы наблюдений, по результатам обработки полевых измерений, полученных с использованием указанной системы наблюдений, производят полную трехмерную реконструкцию поискового объекта.
При этом плотность расстановки измерителей в площадной системе наблюдений выбирают исходя из требований к разрешающей способности метода для учета объектов верхней части разреза, осевых поверхностей геоэлектрических маркеров.
Преимущественно разнос D между центром источника с площадью, эквивалентной квадрату со стороной L, и самым дальним выносом измерителя выбирают в интервале [0-5L], а длину (L) стороны квадрата, эквивалентного площади индуктора, выбирают из соотношения L ≥ Н / 5, где H – глубина до горизонта поисковых объектов.
Кроме того, преимущественно, минимальная сторона (L) квадрата, эквивалентного площади индуктора, выбирается из условия достижения магнитного момента индуктора М = L2I, при котором уровень сигнала от целевого объекта находится в диапазоне измеряемых значений применяемого измерительного устройства, где I – амплитуда тока в источнике.
Сущность изобретения заключается в том, что максимальный разнос «источник-приемник» при регистрации вторичного электромагнитного поля определяется, исходя из пространственного распределения максимумов аномалии от поисковых объектов с использованием стартовой геоэлектрической модели исследуемой среды.
Фиг. 1 – Фиг.3 иллюстрируют способ согласно изобретению.
На фиг. 1а приведен пример геоэлектрических условий месторождений Волго-Уральской нефтегазоносной области.
На фиг. 1б схематично показаны рифовые структуры девонского периода, площадью до 3×3км2 в плане (поисковые объекты), находящиеся на глубине около 5500м, характерные для месторождений Волго-Уральской нефтегазоносной области, являющиеся признаком залежи углеводородов.
На фиг. 1в показана апертура системы наблюдений при электромагнитных зондированиях согласно изобретению, где 1 – источник электромагнитного поля эквивалентный квадрату со стороной L, 2 – группа измерителей с максимальным разносом «источник-измеритель» D, необходимым для локализации поискового объекта 3, находящимся на горизонте с глубиной H. В данном случае глубина H до целевого горизонта составляет порядка 5500м, параметры L и D определяются в результате численного моделирования.
На фиг. 2 показано распределение нормированного сигнала на дневной поверхности полученного в результате моделирования, то есть сигнала для модели с поисковыми объектами, нормированного на сигнал в среде без объектов (во вмещающей слоистой среде) в момент максимума аномалии от поисковых объектов (что также называют относительной аномалией). Показана стандартная система наблюдений на основе петлевого источника с L=1200м (расстановка источников по системе «петля к петле») с максимальным разносом «источник-приемник» 500м (для каждого источника приемники расположены только внутри его контура), часто используемая при площадных электроразведочных работах в нефтяных задачах, где 1 – контуры петлевых источников, 2 – группа измерителей сигнала, 4 – проекция поискового объекта 3 на дневную поверхность.
На фиг. 3 показано распределение на дневной поверхности нормированного сигнала в момент максимума аномалии от поисковых объектов и система наблюдений на основе петлевого источника L=1500м с максимальным разносом «источник-приемник» D=5000м. Цифрами на рисунке обозначены: 1 – контуры петлевых источников, 2 – группа измерителей сигнала, 4 – проекция поискового объекта 3 на дневную поверхность.
Конкретная реализация способа показана на примере картирования флюидонасыщенного нефтегазового коллектора для условий Волго-Уральской нефтегазоносной области.
Способ электромагнитной разведки с оптимизацией апертуры системы наблюдений согласно изобретению включает в себя следующую последовательность операций.
Для выбранных геоэлектрических условий формируют стартовую геоэлектрическую модель, учитывающую всю априорную информацию о регионе проведения электроразведочных работ: исходная геологическая обстановка района работ, референтный разрез по данным бурения и электромагнитного каротажа (пример показан на фиг.1а), ожидаемые геометрические и электрофизические параметры поисковых объектов. В данном случае целевым горизонтом является водонасыщенный коллектор на глубине 5500-5700м (фиг. 1б), в котором могут быть сосредоточены участки насыщения углеводородами площадью до 3×3км2, признаком чего является наличие рифовых структур, увеличивающих сопротивление коллектора до 1500-5000 Омм. При построении стартовой модели учитывалось, что данные бурения и электромагнитного каротажа на данной площади показали возможное наличие перекрывающих проводящих горизонтов в интервале глубин 2500-4500м, которые могут быть как относительно локальными водонасыщенными линзами, так и достаточно протяженными структурами, что наряду с большой глубиной залегания поисковых объектов можно отнести к осложняющим факторам при исследовании среды электромагнитным методом.
Для построенной стартовой модели с использованием методов численного моделирования получают распределения значений синтетических сигналов на дневной поверхности и распределение максимумов относительной аномалии от поисковых объектов (сигналов в среде с поисковыми объектами, нормированных на сигналы в референтной среде в этих же точках) при различных положениях источника 1 относительно проекций поискового объекта 3 с целью определить максимальное проявление поискового объекта 3 в измеряемых сигналах, которое заметно бы превышало уровень относительной аномалии, получаемой с использованием стандартной для нефтегазовой разведки системы наблюдений с малыми разносами (фиг.2). При этом плотность группы измерителей 2 в площадной системе наблюдений выбирается, исходя из требований к учету объектов верхней части разреза, осевых поверхностей геоэлектрических маркеров.
Максимум аномалии от поисковых объектов 3 составил всего 4% и 1%, как показано на фиг. 2. Очевидно, если поисковый объект 3 окажется в зоне влияния перекрывающих помех в вышележащих горизонтах, локализовать его в таком случае будет невозможно. Также очевидно, что, если установка расположена сбоку от поискового объекта 3, то разноса 500м может быть не достаточно, чтобы зарегистрировать аномалию от поискового объекта 3, что можно продемонстрировать дальнейшими результатами.
Далее определяют, исходя из пространственного распределения максимумов относительной аномалии от поискового объекта 3 на дневной поверхности, максимальный разнос «источник-приемник» и расстояние между источниками 1 на площади работ, необходимых для точной локализации поисковых объектов 3. Положение источника 1, при котором достигается максимальное проявление поисковых объектов 3, было найдено в результате серии расчетов, в которых источник 1 последовательно удалялся от положения над поисковым объектом 3 на расстояние до 2H, где H – предполагаемая глубина до поискового объекта 3.
Пример оптимизированной системы наблюдений показан на фиг.3. Видно, что увеличенный разнос позволил зарегистрировать аномальный сигнал от поискового объекта (аномалия составила 9% над большим объектом и 5% над малым объектом) при боковом расположении источника поля 1.
В оптимизированной системе наблюдений (фиг.3) максимальный разнос «источник-измеритель» D определен по расстоянию от центра источника 1 до центра аномалии 4, связанной с наличием в среде поискового объекта 3. Площадь одной раскладки (апертуры) системы наблюдений (группы измерителей 2 вторичного поля от одного источника 1) составит 2·D × 2·D, соответственно расстояние между центрами соседних источников 1 в оптимизированной системе наблюдений составит 2·D.
Опыт моделирования показывает, что максимальный разнос D апертуры преимущественно не превышает величины 5L, где L – сторона квадрата, эквивалентного площади индуктора, а значение L сопоставимо с величиной H/5, где H – глубина до целевого горизонта. При этом необходимо учитывать момент системы М = L2I (где I – амплитуда тока в источнике 1), для того, чтобы контролировать измеримость сигнала при достижении целевого горизонта.
С использованием построенной оптимизированной системы наблюдений на основе апертур 2·D × 2·D для источников 1 проводят полевые измерения на площади работ.
Далее по результатам обработки полевых измерений, полученных с использованием оптимизированной системы наблюдений, производят полную трехмерную реконструкцию изучаемой среды, с обеспечением высокой достоверности геофизического прогноза и, соответственно, снижением затрат на проведение полевых работ при наличии осложняющих геологических факторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ электроразведки с оптимизацией апертуры системы наблюдений | 2017 |
|
RU2645864C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2009 |
|
RU2411549C1 |
| СПОСОБ ПРОГНОЗА ЕМКОСТНЫХ ПАРАМЕТРОВ И ТИПА ФЛЮИДОНАСЫЩЕНИЯ КОЛЛЕКТОРОВ | 2013 |
|
RU2540216C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ В УСЛОВИЯХ ТЕХНОГЕННОЙ ИНФРАСТРУКТУРЫ | 2013 |
|
RU2528115C1 |
| Способ геоэлектроразведки (варианты) | 2015 |
|
RU2631532C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ЧАСТОТНО-ВРЕМЕННОЙ ГЕОЭЛЕКТРОРАЗВЕДКИ (FTEM-3D) | 2010 |
|
RU2446417C2 |
| Способ прогноза насыщения коллекторов на основе комплексного анализа данных СРР, 3СБ, ГИС | 2019 |
|
RU2700836C1 |
| СПОСОБ ОБЪЕМНОЙ РЕКОНСТРУКЦИИ ЭЛЕКТРОФИЗИЧЕСКОЙ МОДЕЛИ ПОДПОВЕРХНОСТНОЙ СРЕДЫ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОЙ ЭЛЕКТРОМАГНИТНОЙ СИСТЕМЫ | 2024 |
|
RU2836589C1 |
| УСТРОЙСТВО СЕЙСМОРАЗВЕДКИ 2D ИЛИ 3D, ЭЛЕКТРОРАЗВЕДКИ И ГИС ДЛЯ ПОВЫШЕНИЯ НАДЕЖНОСТИ КАРТИРОВАНИЯ КРОВЛИ СОЛИ И ДЛЯ ПРОГНОЗА НЕФТЕГАЗОНОСНОСТИ ПОДСОЛЕВЫХ ОТЛОЖЕНИЙ В РАЙОНАХ С РАЗВИТОЙ СОЛЯНОКУПОЛЬНОЙ ТЕКТОНИКОЙ | 2015 |
|
RU2595327C1 |
| КОМПЛЕКС ДЛЯ ПОИСКОВО-РАЗВЕДОЧНЫХ РАБОТ НА НЕФТЬ И ГАЗ В СЛОЖНОПОСТРОЕННЫХ РАЙОНАХ С РАЗВИТОЙ СОЛЯНОКУПОЛЬНОЙ ТЕКТОНИКОЙ С КАРТИРОВАНИЕМ КРОВЛИ СОЛИ И ПОДСОЛЕВЫХ ОТЛОЖЕНИЙ И КОМПЬЮТЕРНО-ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС (КТК) ДЛЯ НЕГО | 2014 |
|
RU2594112C2 |
Изобретение относится к геологии. Способ электромагнитной разведки с оптимизацией системы наблюдений, при котором с помощью зафиксированного на поверхности наблюдений источника электромагнитного поля в исследуемой среде возбуждают нестационарное электромагнитное поле, и системой измерителей, расположенной на поверхности земли вблизи и на удалении от проекции источника, измеряют вторичное нестационарное электромагнитное поле вихревых токов. При этом максимальный разнос D «источник-измеритель» определяют на основе пространственного распределения максимумов аномалий от поисковых объектов на поверхности земли с использованием стартовой геоэлектрической модели поискового объекта, построенной с использованием априорной геологической информации, при этом расположение максимумов аномалии поискового объекта на поверхности земли определяют путем моделирования в области измеряемых значений сигналов вторичного электромагнитного поля, выбирают значение разноса «источник-приемник», соответствующее максимумам относительной аномалии от поискового объекта, по положению максимумов относительной аномалии от поискового объекта определяют размер апертуры для каждого положения источника и расстояние между источниками с получением оптимизированной системы наблюдений, и по результатам обработки полевых измерений, полученных с использованием указанной системы наблюдений, производят полную трехмерную реконструкцию поискового объекта. Технический результат – повышение достоверности. 4 з.п. ф-лы, 3 ил.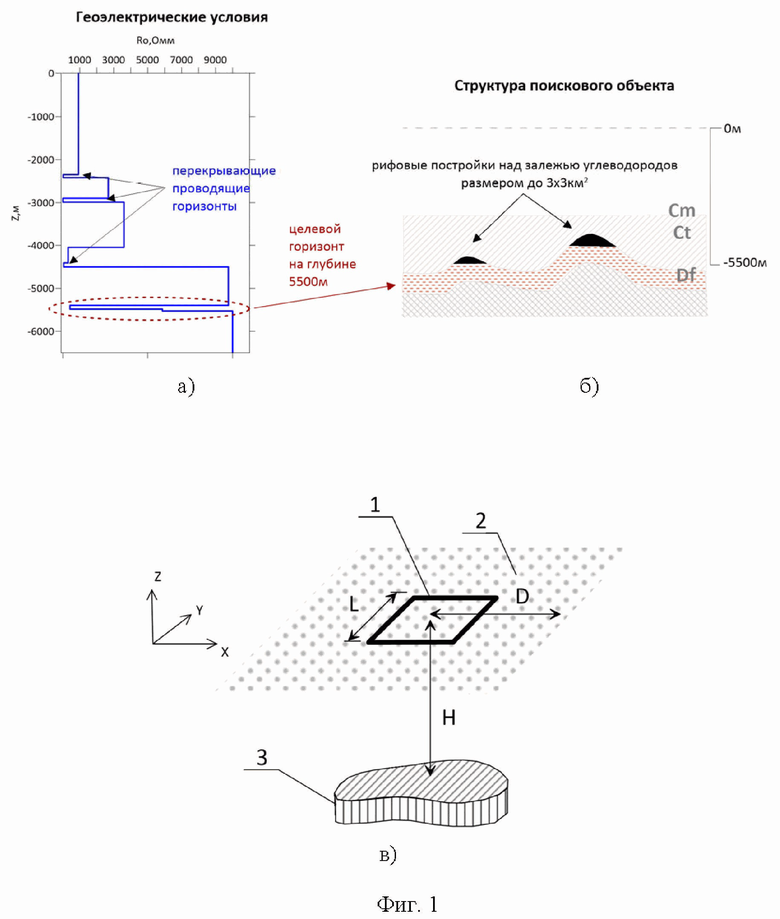
1. Способ электромагнитной разведки с оптимизацией системы наблюдений, при котором с помощью зафиксированного на поверхности наблюдений источника электромагнитного поля в исследуемой среде возбуждают нестационарное электромагнитное поле, и системой измерителей, расположенной на поверхности земли вблизи и на удалении от проекции источника, измеряют вторичное нестационарное электромагнитное поле вихревых токов, отличающийся тем, что максимальный разнос D «источник-измеритель» определяют на основе пространственного распределения максимумов аномалий от поисковых объектов на поверхности земли с использованием стартовой геоэлектрической модели поискового объекта, построенной с использованием априорной геологической информации, при этом расположение максимумов аномалии поискового объекта на поверхности земли определяют путем моделирования в области измеряемых значений сигналов вторичного электромагнитного поля, выбирают значение разноса «источник-приемник», соответствующее максимумам относительной аномалии от поискового объекта, по положению максимумов относительной аномалии от поискового объекта определяют размер апертуры для каждого положения источника и расстояние между источниками с получением оптимизированной системы наблюдений, и по результатам обработки полевых измерений, полученных с использованием указанной системы наблюдений, производят полную трехмерную реконструкцию поискового объекта.
2. Способ по п. 1, отличающийся тем, что плотность расстановки измерителей в площадной системе наблюдений выбирают, исходя из требований к разрешающей способности метода для учета объектов верхней части разреза, осевых поверхностей геоэлектрических маркеров.
3. Способ по п. 1, отличающийся тем, что разнос D между центром источника с площадью, эквивалентной квадрату со стороной L, и самым дальним выносом измерителя выбирают в интервале [0-5L], где L – сторона квадрата, эквивалентного площади индуктора.
4. Способ по п. 3, отличающийся тем, что длина (L) стороны квадрата, эквивалентного площади индуктора, выбирается из соотношения L ≥ Н / 5, где H – глубина до горизонта поисковых объектов.
5. Способ по п. 4, отличающийся тем, что минимальная сторона (L) квадрата, эквивалентного площади индуктора, выбирается из условия достижения магнитного момента индуктора М = L2I, при котором уровень сигнала от целевого объекта находится в диапазоне измеряемых значений применяемого измерительного устройства, где I – амплитуда тока в источнике.
| Способ электроразведки с оптимизацией апертуры системы наблюдений | 2017 |
|
RU2645864C1 |
| Абрамов М | |||
| В | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Тригубович Г | |||
| М | |||
| и др | |||
| Электромагнитный прерыватель | 1924 |
|
SU2023A1 |
| Парный рычажный домкрат | 1919 |
|
SU209A1 |
| Абрамов М.В и др | |||
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ ФОКУСИРОВКА МНОГОРАЗНОСНЫХ ЗОНДИРОВАНИЙ ЗС ПРИ ГЛУБИННЫХ ИССЛЕДОВАНИЯХ // В | |||

