Область техники
Настоящее изобретение в основном относится к трансмиссиям транспортных средств. Более конкретно, настоящее изобретение относится к трансмиссиям для рабочих транспортных средств, имеющих механизм отбора мощности (РТО). В частности, настоящее изобретение относится к способу использования муфты механизма отбора мощности для измерения вспомогательных нагрузок.
Уровень техники
Обычно, при переключении передач, многие трансмиссии силового переключения передач используют управляемые соленоидом клапаны для управления давлением на каждой муфте и зависят от сигнала, который характеризует нагрузку двигателя для определения давления, прикладываемого к встречным муфтам.
Проблема состоит в том, что сигнал нагрузки двигателя может быть неправильно оценен. Например, при работе сельскохозяйственного трактора бывают условия, в которых большая часть нагрузки двигателя может быть использована для вспомогательных функций использования мощности, таких как гидравлический насос или инструменты механизма отбора мощности. Упомянутая ситуация может вызывать проблемы, когда качество переключения является грубым, вследствие того, что давление встречных сцеплений программируется на высокое давление, тогда как вместо этого оно должно программироваться низким, потому что действительно к ведущим колесам поступает только небольшая часть мощности двигателя.
Способ решения упомянутой проблемы описан в патенте США №6022292. В данной ссылке сигнал нагрузки, поступающей из двигателя, регулируется в предположении, что часть нагрузки действует на какую-либо подключенную вспомогательную функцию. Упомянутый сигнал нагрузки обычно регулируется автоматически на основе характеристик результирующего переключения. Если во время переключения трактор чрезмерно замедляется, это является показателем того, что предположительная нагрузка двигателя, которая действует на колеса, является слишком низкой. Если во время переключения трактор ускоряется, это является показателем того, что предположительная нагрузка двигателя, которая действует на колеса, является слишком высокой. Проблема упомянутого способа заключается в том, что он реагирует только на неправильное переключение. В первую очередь, это не предотвращает возникновение неправильного переключения.
Другая проблема заключается в том, что цепи привода транспортных средств должны рассчитываться для управления максимальной мощностью двигателя. Однако, в некоторых случаях, некоторая часть мощности двигателя действует на вспомогательные функции, такие как инструменты механизма отбора мощности или гидравлические насосы. В указанных случаях может требоваться повышение мощности двигателя вследствие того, что ограничивающий фактор (цепь привода) не нагружен до своей потенциальной возможности.
Способ определения мощности, действующей на инструмент механизма отбора мощности, описан в патенте США №6729459. В упомянутом способе давление муфты механизма отбора мощности снижается и поддерживается на уровне давления, которое производит небольшую пробуксовку сцепления. Зная запрограммированное давление, которое вызывает пробуксовку, можно вычислить часть мощности, действующей через муфту механизма отбора мощности. Кроме обеспечения измерения крутящего момента данный способ также обеспечивает способ защиты карданной передачи механизма отбора мощности от приложенных ударных нагрузок. Первичным недостатком упомянутой системы являются потери мощности, которые неотъемлемы от непрерывной пробуксовки сцепления.
Соответственно, имеется очевидная потребность в способе определения уровня нагрузки двигателя, действующей на вспомогательную функцию, который устраняет вышеупомянутые проблемы.
Краткое описание изобретения
Ввиду вышесказанного задача настоящего изобретения состоит в том, чтобы обеспечить способ определения вспомогательной нагрузки на двигатель.
Другая задача настоящего изобретения состоит в том, чтобы обеспечить такой способ, который совместим с известными системами цепи привода и методами функционирования.
Вышеупомянутые и другие задачи настоящего изобретения вместе с его преимуществами над уровнем техники, которые станут очевидными из нижеследующего подробного описания, достигаются посредством создания способа определения вспомогательной нагрузки на двигатель транспортного средства, оборудованного механизмом отбора мощности, для осуществления вспомогательной функции, при котором отслеживают частоту вращения вала на входе муфты механизма отбора мощности, а также частоту вращения вала на выходе муфты механизма отбора мощности для определения пробуксовки муфты; периодически линейно понижают давление муфты механизма отбора мощности до тех пор, пока не будет определена пробуксовка муфты; определяют запрограммированное давление в точке, где возникает пробуксовка; и вычисляют эквивалентную мощность двигателя, которая действует на вспомогательную функцию, в зависимости от запрограммированного давления при пробуксовке для определения пропорции сигнала нагрузки двигателя, действующего на вспомогательную функцию, в зависимости от вращения ведущих колес.
В основном, когда на вспомогательный прибор действует мощность посредством карданной передачи механизма отбора мощности, давление муфты механизма отбора мощности периодически медленно линейно понижается до тех пор, пока не будет обнаружена пробуксовка муфты. Пробуксовка обнаруживается путем отслеживания частоты вращения вала на входе муфты сцепления, а также частоты вращения вала на выходе муфты. Определением запрограммированного давления, при котором возникает пробуксовка, вычисляется эквивалентная мощность двигателя, которая действует на вспомогательную функцию. С помощью упомянутой информации определяется пропорция сигнала нагрузки двигателя, действующей на вспомогательную функцию, в зависимости от вращения ведущих колес. После того как обнаруживается пробуксовка муфты механизма отбора мощности, давление на муфту обратно линейно повышается, чтобы минимизировать величину пробуксовки.
Основная разница между способом согласно настоящему изобретению и способом, который описан в патенте США №6729459, заключается в том, что давление муфты механизма отбора мощности периодически снижается только до тех пор, пока не возникнет пробуксовка, в сравнении с тем, что давление снижается до точки, в которой непрерывно происходила бы пробуксовка муфты. Преимущество настоящего способа состоит в том, что он снижает потери мощности, которые являются результатом непрерывной пробуксовки муфты.
Для специалистов, наиболее близко связанных с областью настоящего изобретения, здесь описывается один предпочтительный вариант осуществления изобретения, который иллюстрирует наилучший режим, предполагаемый для практического осуществления изобретения, со ссылкой на прилагаемые чертежи, которые составляют часть описания. Иллюстративный вариант осуществления описывается подробно без попытки показать все различные формы и модификации, в которых могло бы осуществляться изобретение. Сам по себе вариант осуществления, показанный и описанный здесь, является иллюстративным и, как станет очевидным для специалистов, может быть модифицирован многочисленными способами в пределах сущности и рамок настоящего изобретения, которые определяются формулой изобретения, а не деталями описания.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на прилагаемые чертежи, на которых:
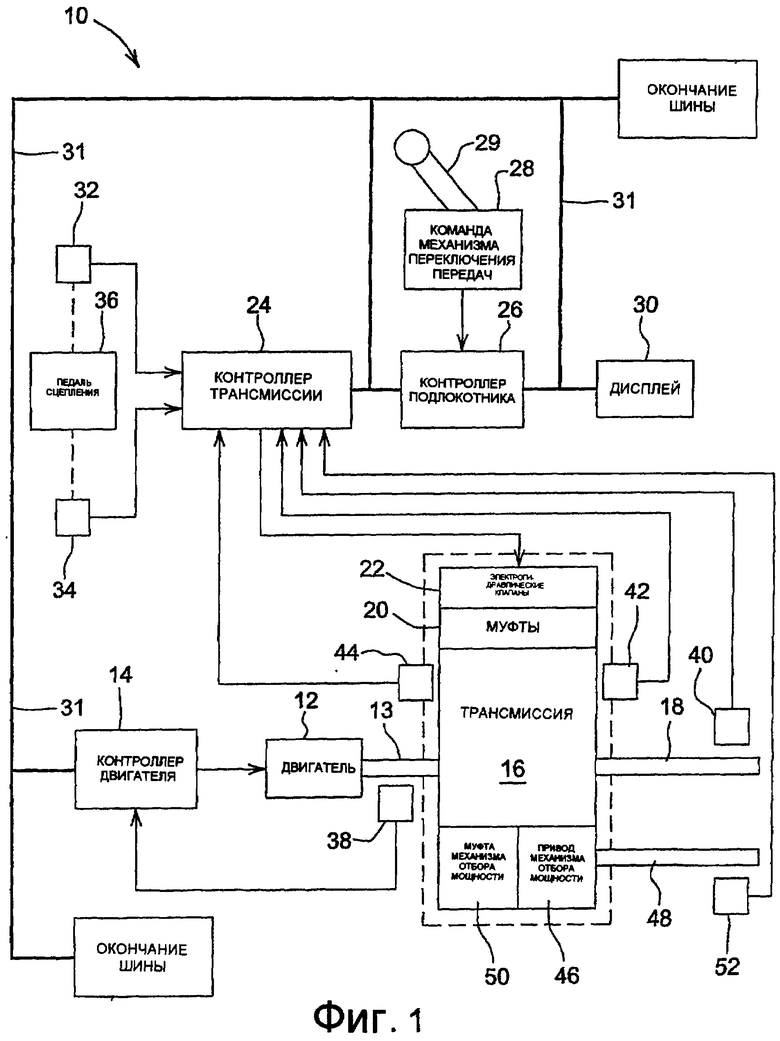
фиг.1 - блок-схема системы управления трансмиссией согласно настоящему изобретению;
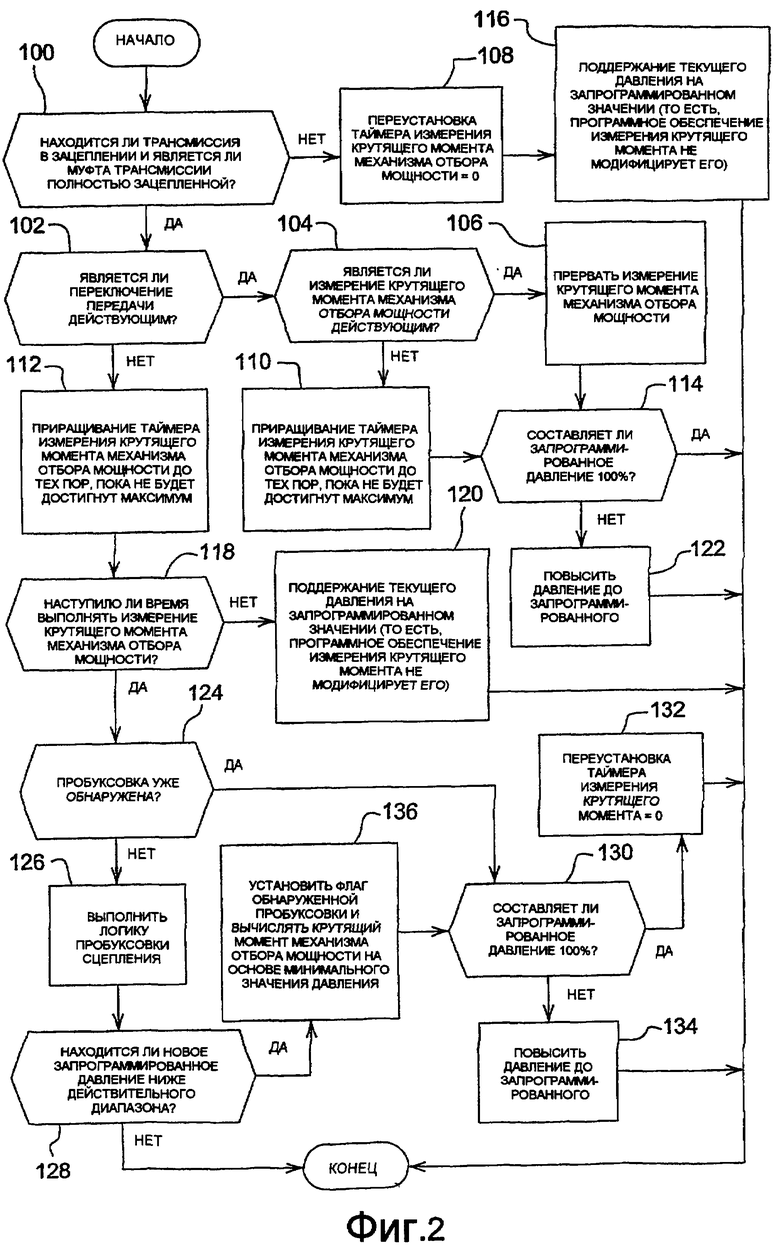
фиг.2 - логическая процедурная схема, иллюстрирующая алгоритм, исполняемый контроллером трансмиссии с фиг.1;
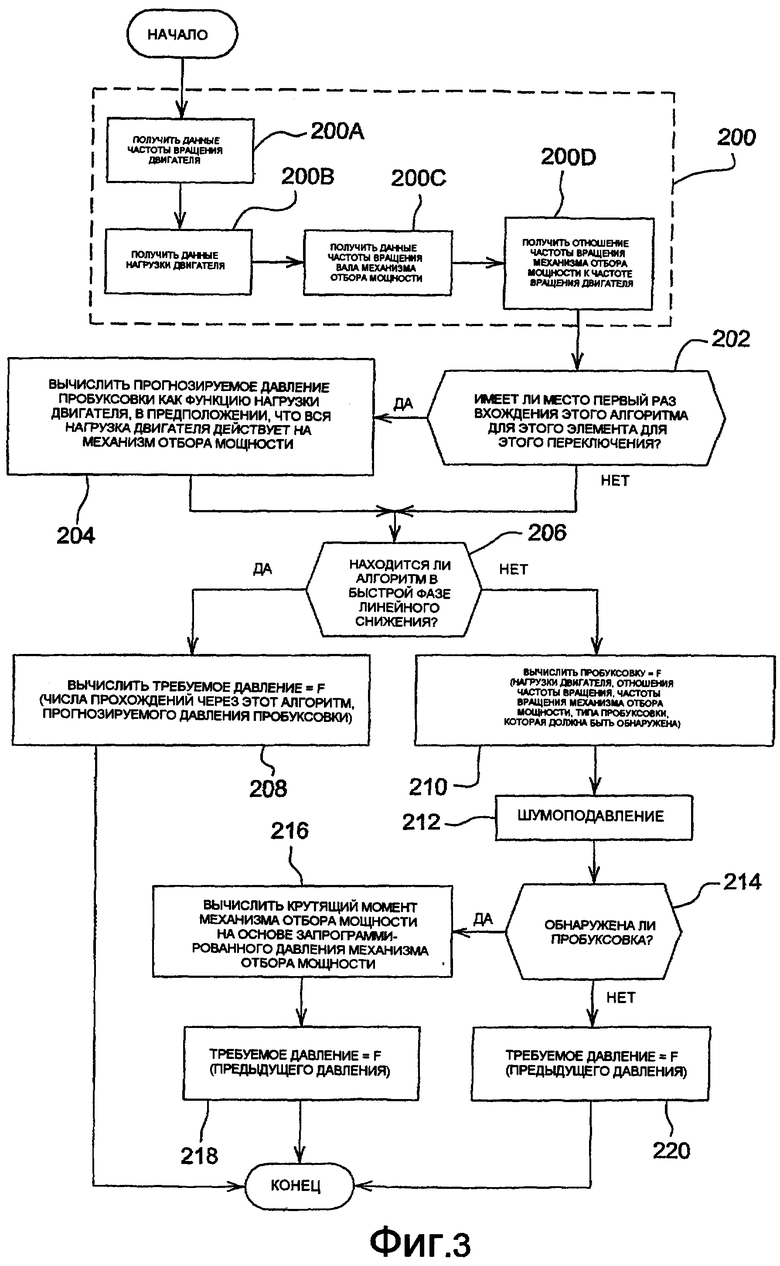
фиг.3 - логическая процедурная схема, иллюстрирующая алгоритм, представленный этапом 126 на фиг.2.
Описание предпочтительного варианта осуществления изобретения
Теперь со ссылкой на чертежи и, более конкретно, на фиг.1 можно видеть, что система микропроцессорного управления трансмиссией, к которой применимо настоящее изобретение, обозначена в целом ссылочной позицией 10. Силовая передача транспортного средства включает в себя двигатель 12, который управляется электронным модулем 14 управления двигателем и который приводит в действие коробку передач с переключением скоростей под нагрузкой (PST) 16 через входной вал 13. Трансмиссия 16 имеет внутренний промежуточный вал (не показан) и выходной вал 18, который соединяется к ведущим колесам (не показаны). PST 16 включает в себя набор управляющих элементов, приводимых в действие давлением, или муфт 20, которые управляются соответствующим набором пропорциональных управляющих клапанов 22, приводимых в действие соленоидом. Трансмиссия 16 может, например, быть такой трансмиссией, которая описана в патенте США №5011465. Клапаны 22 могут быть двухкаскадными электрогидравлическими клапанами, которые описаны в патенте США №4741364.
PST 16 управляется модулем 24 управления трансмиссией, модулем 26 управления подлокотником, который принимает и интерпретирует команды рычага переключения из модуля 28 команд рычага переключения. Модуль 28 команд рычага переключения предпочтительно является известным модулем команд рычага переключения, используемым в производстве тракторов марки John Deere, и включает в себя рычаг 29 механизма переключения передач. Такой модуль команд рычага переключения описан в патенте США №5406860. Модуль 30 дисплея может отображать информацию, относящуюся к системе 10. Модуль 24 управления трансмиссией и модуль 26 управления подлокотником предпочтительно являются микропроцессорными электронными модулями управления.
Ручное управление достигается через управляемый оператором модуль 28 команд рычага переключения. Модуль 28 обеспечивает сигналы, представляющие положение рычага 29, в модуль 26 управления подлокотником. Модуль 26 управления подлокотником посылает команды механизма переключения в модуль 24 управления трансмиссией через коммуникационную шину 31 транспортного средства.
Датчик 32 сцепления муфты и переключатель 34 разъединения муфты обеспечивают сигналы, представляющие положение педали 36 сцепления. Модуль 14 управления двигателем принимает сигналы из датчика 38 частоты вращения двигателя, а также других датчиков (не показаны), которые позволяют модулю 14 управления двигателем передавать информацию нагрузки двигателя по коммуникационной шине 31 транспортного средства. Контроллер 24 трансмиссии принимает сигналы от датчика 40 частоты вращения полуоси, датчика 42 частоты вращения промежуточного вала, который воспринимает частоту вращения промежуточного вала, который является внутренним для трансмиссии 16, и датчика 44 температуры трансмиссионного масла. Контроллер 24 трансмиссии посылает информацию о частоте вращения колес (вычисленной из частоты вращения полуоси на основе размера шины) и о температуре масла в дисплей 30 через коммуникационную шину 31 транспортного средства. Информация частоты вращения промежуточного вала используется только для целей управления и не отображается в нормальных рабочих условиях.
Трансмиссия 16 дополнительно включает в себя привод 46 механизма отбора мощности для приведения в действие вспомогательного прибора или инструмента (не показан) посредством выходного вала 48 механизма отбора мощности. Привод 46 механизма отбора мощности зацепляется через муфту 50 механизма отбора мощности. Частота вращения выходного вала 48 механизма отбора мощности измеряется посредством датчика 52 частоты вращения механизма отбора мощности, который сообщается с контроллером 24 трансмиссии.
Контроллер 24 трансмиссии включает в себя коммерчески доступный микропроцессор, который подает управляющие сигналы в набор ведущих деталей клапанов (не показаны), которые обеспечивают подачу варьирующихся управляющих сигналов напряжения, модулированных шириной импульса рабочего цикла, в клапаны 22. Контроллер 24 трансмиссии генерирует управляющие сигналы как функцию различных воспринятых или заданных оператором входных сигналов, чтобы достичь требуемого давления в муфтах и, тем самым, управлять переключением трансмиссии 16 требуемым образом.
Контроллер 24 трансмиссии выполняет известный алгоритм производственного основного цикла (не показан), который управляет варьирующимся во времени гидравлическим давлением, которое прикладывается к различным элементам муфты трансмиссии. Согласно настоящему изобретению контроллер также выполняет алгоритм, представленный фиг.2 и 3. Превращение процедурных схем фиг.2 и 3 в стандартный язык для выполнения алгоритма, описанного процедурной схемой в цифровом компьютере или микропроцессоре, будет очевидно для специалистов.
Фиг.2 иллюстрирует, каким образом выполняется способ в микропроцессорной системе управления. Последовательность от начала до конца на фиг.2 выполняется диспетчером задач типа операционной системы реального времени на некоторых периодических интервалах, проходящих в контроллере трансмиссии. Рамки изобретения не включают в себя стратегию нормального зацепления механизма отбора мощности. В начале указанного алгоритма предполагается, что механизм отбора мощности включен и полностью зацеплен. Если механизм отбора мощности не является включенным и полностью зацепленным, то алгоритмы изобретения не работают. Результатом этой логической схемы в конце является запрограммированное давление в кПа. Последующие процессы, которые применяют это запрограммированное давление электронными средствами к муфте механизма отбора мощности через клапан механизма отбора мощности, и другие факторы, которые могли бы влиять на окончательное запрограммированное давление, не входят в рамки настоящего изобретения.
Можно видеть, что на этапе 100 с фиг.2 при процессе измерения крутящего момента механизма отбора мощности определяется, является ли муфта трансмиссии полностью зацепленной и находится ли трансмиссия в зацеплении. Если этот критерий не удовлетворяется, то измерение крутящего момента механизма отбора мощности будет заблокировано посредством переустановки таймера измерения крутящего момента механизма отбора мощности на этапе 108 (в последующем описании упоминаемое просто как "таймер") и на этапе 116 запрограммированное давление останется неизменным. Затем таймер обеспечивает начальную временную задержку для первого измерения крутящего момента в событии, когда муфта трансмиссии становится полностью зацепленной и трансмиссия полностью переключается в зацепление.
На этапе 102 проверяется второй критерий для попытки измерения крутящего момента механизма отбора мощности, чтобы увидеть, является ли переключение передачи действующим. Если да, то либо измерение крутящего момента механизма отбора мощности не начнется, в случае чего на этапе 112 таймеру просто добавляется приращение и запрограммированное давление поддерживается на 100%, либо в событии, когда измерение крутящего момента механизма отбора мощности является действующим в момент переключения, как на этапе 104, текущее измерение крутящего момента будет прервано, как показано на этапе 106, и запрограммированное давление будет линейно повышаться обратно до полного давления на этапе 122, если запрограммированное давление меньше чем 100% от полного давления, как на этапе 114, в момент, когда инициируется переключение.
Если переключение передачи не является действующим, то на этапе 110 таймер приращивается и ограничивается, чтобы предотвратить переполнение, и проверяется, чтобы увидеть, следует ли делать новое измерение крутящего момента механизма отбора мощности на этапе 118. Если не время начинать измерение крутящего момента механизма отбора мощности, то запрограммированное давление не изменяется. Если время начинать новое измерение крутящего момента механизма отбора мощности, то на этапе 124 проверяется пробуксовка муфты, перед тем как на этапе 126 выполняется логика пробуксовки муфты. Если пробуксовка обнаруживается, то давление линейно повышается обратно до 100%, и таймер переустанавливается для следующего цикла измерения. Если пробуксовка не обнаруживается, то выполняется логика пробуксовки муфты.
Выход логики пробуксовки муфты представляет собой запрограммированное давление для муфты механизма отбора мощности во время выполнения алгоритма. Когда обнаруживается пробуксовка, крутящий момент механизма отбора мощности вычисляется как функция запрограммированного давления, при котором была обнаружена пробуксовка. Затем на этапе 130, 134 давление линейно повышается обратно до полного давления, и таймер переустанавливается для следующей попытки измерения.
Теперь со ссылкой на фиг.3 обсуждаются подробности логики пробуксовки муфты для блока 126 с фиг.2. Первый этап 200 в логике пробуксовки муфты состоит в том, чтобы получить текущие данные частоты вращения двигателя 200A, нагрузки двигателя (то есть тормозной момент) 200B, частоты вращения вала 200C механизма отбора мощности и отношения частоты вращения механизма отбора мощности к частоте вращения двигателя 200D. Если на этапе 202 имеет место первый путь через процедуру программного обеспечения для элемента сцепления, то прогнозируемое давление пробуксовки вычисляется на этапе 204 на основе нагрузки двигателя, в предположении, что вся нагрузка двигателя действует на механизм отбора мощности. Уравнение, которое соотносит величину крутящего момента двигателя, действующего через трансмиссию, с давлением пробуксовки, является следующим:
крутящий момент двигателя (Nm) = давление пробуксовки (кПа)·m+b.
Угловые коэффициенты m и b находятся эмпирически. Прогнозируемое давление пробуксовки может быть вычислено посредством использования вышеприведенного уравнения, решаемого для давления пробуксовки. Уравнение будет следующее:
прогнозируемое давление пробуксовки (кПа) = (крутящий момент двигателя - b)/m.
В таком алгоритме эмпирически найденный отрезок b подбирается относительно значения калиброванного давления для элемента муфты механизма отбора мощности путем вычитания произведения калиброванного заданного давления и угла наклона m. Таким образом, уравнение, выведенное из набора экспериментальных данных, может применяться ко всем транспортным средствам, к которым применяется изобретение.
Каждый раз, когда выполняется алгоритм, на этапе 206 принимается решение, чтобы определить, находится ли алгоритм в фазе быстрого линейного понижения. Муфта механизма отбора мощности имеет счетчик циклов, связанный с ней, в программном обеспечении, которое указывает число прохождений через функцию пробуксовки муфты, с момента начала измерения крутящего момента. Решение о том, должен ли алгоритм выполнять фазу быстрого линейного понижения или переходить к фазе постепенного линейного понижения, основано просто на значении этого счетчика циклов. Если показание счетчика циклов меньше некоторого значения, например 6, то алгоритм выполняет быстрое линейное понижение давления на муфту. Прогнозируемое вышеупомянутое давление пробуксовки на этапе 208 устанавливает заданное давление для программного обеспечения исходного быстрого линейного понижения. Иллюстративное уравнение, которое могло бы использоваться для вычисления выхода запрограммированного давления во время этой фазы быстрого линейного понижения, является следующим:
запрограммированное давление = предыдущий выход давления - (заданное изменение · 2/3).
В вышеприведенном уравнении заданное изменение представляет собой разность между предыдущим выходом давления и вышеупомянутым прогнозируемым давлением пробуксовки, где предыдущий выход давления устанавливается равным полному давлению системы. Другой подход мог бы быть основан на значениях выхода давления в справочной таблице. Например:
Цель фазы быстрого линейного понижения состоит в том, чтобы быстро снизить давление на муфту механизма отбора мощности до давления, которое незначительно выше, где сигнал нагрузки двигателя указывает на то, что элемент муфты сейчас начнет буксовать, если вся нагрузка двигателя действует на механизм отбора мощности. Указанный способ используется просто в попытке минимизировать полное время выполнения алгоритма. Профиль запрограммированного давления во время фазы быстрого линейного понижения определяется эмпирически, чтобы минимизировать провал давления.
Как только достигается упомянутое давление, алгоритм переходит к фазе постепенного линейного понижения давления на этапе 210. Во время этой фазы запрограммированное давление снижается постепенно, на фиксированную величину в каждой процедуре, например на 2 кПа, в то время как программное обеспечение пытается обнаружить пробуксовку муфты механизма отбора мощности. Пробуксовка определяется как относительное перемещение между дисками муфты механизма отбора мощности. Коэффициент скольжения вычисляется следующим образом:
коэффициент скольжения = (частота вращения вала механизма отбора мощности · передаточное отношение механизма отбора мощности)/частота вращения двигателя.
В упомянутом алгоритме коэффициент скольжения вычисляется с точностью 0,1%.
На этапе 212 коэффициент скольжения пропускается через алгоритм шумоподавления, который состоит из N/(N+1) цифрового усредненного фильтра и дополнительной логики. Действительная пробуксовка вычисляется на основе фильтрованного значения коэффициента скольжения. Если обнаруживается отрицательное скольжение, то коэффициент скольжения 0,980 соответствует действительной пробуксовке 2,0%. Если обнаруживается положительное скольжение, то коэффициент скольжения 1,020 соответствует действительной пробуксовке 2,0%. Дополнительная логика состоит из проверки направления пробуксовки (положительного или отрицательного) и сравнения текущего измерения пробуксовки со значением из предыдущего прохождения через алгоритм. Действительное обнаружение пробуксовки выполняется на этапе 214, если текущая пробуксовка по абсолютному значению больше, чем предыдущее значение пробуксовки в одном и том же направлении, и больше некоторого порога. Более того, в памяти для каждого элемента сцепления существует параметр управления, чтобы устанавливать, сколько этих действительных событий пробуксовки должно быть замечено перед обнаружением пробуксовки. На практике было обнаружено, что для муфты механизма отбора мощности эффективны следующие параметры:
N=3,
требуемых действительных событий пробуксовки = 1,
порог обнаружения пробуксовки = 2,0%.
Для измерения крутящего момента механизма отбора мощности отрицательное скольжение является требуемым выбором обнаружения. Если на этапе 214 пробуксовка не обнаруживается, то фиксированная величина давления вычитается из предыдущего запрограммированного давления, и на этапе 218 результат становится новым требуемым давлением. Если на этапе 214 пробуксовка обнаруживается, то на этапе 216 запрограммированное давление отрабатывается обратно через вышеприведенное линейное уравнение, чтобы вывести вычисленный крутящий момент механизма отбора мощности, и запрограммированное давление остается неизменным на этапе 220. Затем вычисленный крутящий момент механизма отбора мощности делается доступным для других процессов в программном обеспечении, которые могут извлекать из него пользу, например алгоритмы переключения передач. Также в программном обеспечении является доступным флаг, который указывает, когда обнаруживается пробуксовка, и выполняется вычисление крутящего момента. Указанный флаг используется родительскими процессами, чтобы эффективно возвращать управление запрограммированного давления (то есть чтобы знать, когда давление, действующее на муфту механизма отбора мощности, обратно линейно повышается), как могло бы быть в случае пути "да" блока 124 с фиг.2.
Последующий процесс, который всегда выполняется после логики пробуксовки муфты, представляет собой граничную проверку запрограммированного давления, которое выводится из логики пробуксовки муфты. Если запрограммированное давление снижается до минимального значения без обнаружения пробуксовки муфты, то на этапе 136 родительский процесс, описанный со ссылкой на фиг.2, будет устанавливать флаг обнаруженной пробуксовки и вычислять крутящий момент механизма отбора мощности из минимального значения давления. Затем давление может обратно линейно повышаться до 100%.
Специалистам должно быть понятно, что, зная то, какая часть мощности двигателя действует на цепь привода и сколько действует на вспомогательные нагрузки, можно улучшить качество переключения передач силового переключения передач при условиях вспомогательной нагрузки, такой как инструменты механизма отбора мощности. Далее давление муфты трансмиссии, используемое во время переключения, может отслеживаться, чтобы манипулировать только с нагрузкой двигателя, которая действует на ведущие колеса. Дополнительно, мощность двигателя может быть увеличена без ущерба для срока службы цепи привода (когда часть мощности двигателя действует на вспомогательную нагрузку).
Таким образом, можно видеть, что задачи изобретения удовлетворяются посредством создания описанной выше конструкции. Хотя были представлены и подробно обсуждены только наилучший режим и предпочтительный вариант осуществления настоящего изобретения, они не должны исчерпывать или ограничивать изобретение строго описанной формой. Возможны очевидные модификации и изменения в свете изложенной теории. Вариант осуществления был выбран и описан, чтобы обеспечить лучшую иллюстрацию принципов настоящего изобретения и его практического применения, чтобы тем самым позволить специалистам использовать изобретение в различных вариантах осуществления и с различными модификациями, которые подходят для предполагаемого конкретного использования. Все подобные модификации и изменения находятся в рамках изобретения, определяемых приложенной формулой изобретения, когда они интерпретируются согласно с объемом, на который они явно и законно имеют право.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧИ ПРИ ОПРЕДЕЛЕНИИ ВЛАЖНОСТИ ОКРУЖАЮЩЕЙ СРЕДЫ (ВАРИАНТЫ) | 2016 |
|
RU2705351C2 |
| АВТОМАТИЗИРОВАННАЯ МЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ И СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ В КОРОБКЕ ПЕРЕДАЧ | 1994 |
|
RU2116895C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) И СИСТЕМА ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА | 2013 |
|
RU2629820C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ | 2013 |
|
RU2638900C2 |
| СПОСОБ ОСТАНОВА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2642012C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670503C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЮФТОМ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ЛЮФТОМ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2640085C2 |
| СПОСОБ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 2014 |
|
RU2581993C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2606160C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2640162C2 |
Изобретение относится к трансмиссии транспортных средств с использованием муфты механизма отбора мощности. Способ включает отслеживание частоты вращения вала на входе и на выходе муфты механизма отбора мощности, периодическое линейное понижение давления муфты механизма отбора мощности до пробуксовки муфты, определение запрограммированного давления в точке возникновения пробуксовки, вычисление эквивалентной мощности двигателя в зависимости от запрограммированного давления при пробуксовке. Технический результат заключается в снижении потерь мощности при управлении вспомогательным приводом. 1 з.п. ф-лы, 3 ил., 1 табл.
1. Способ определения вспомогательной нагрузки на двигатель транспортного средства, оборудованного механизмом отбора мощности, для осуществления вспомогательной функции, при котором отслеживают частоту вращения вала на входе муфты механизма отбора мощности, а также частоту вращения вала на выходе муфты механизма отбора мощности для определения пробуксовки муфты, периодически линейно понижают давление муфты механизма отбора мощности до тех пор, пока не будет определена пробуксовка муфты, определяют запрограммированное давление в точке, где возникает пробуксовка, и вычисляют эквивалентную мощность двигателя, которая действует на вспомогательную функцию, в зависимости от запрограммированного давления при пробуксовке для определения пропорции сигнала нагрузки двигателя, действующего на вспомогательную функцию, в зависимости от вращения ведущих колес.
2. Способ по п.1, при котором дополнительно линейно повышают давление обратно после того, как обнаружена пробуксовка, чтобы минимизировать пробуксовку муфты.
| US 6729459 B2, 04.05.2004 | |||
| US 2003162619 A1, 28.08.2003 | |||
| JP 59199334 A, 12.11.1984 | |||
| МЕХАНИЗМ ОТБОРА МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2132786C1 |

