Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для гибридного транспортного средства, оснащенного трансмиссией, в которой передаточное отношение может быть фиксированным посредством намерения водителя.
Уровень техники
[0002] Известно устройство управления для устройства приведения в движение гибридного транспортного средства, которое управляет трансмиссией таким образом, чтобы переключать передачу "вверх", чтобы уменьшать частоту вращения электромотора-генератора, когда частота вращения электромотора-генератора превышает предварительно определенную частоту вращения. (Например, см. патентный документ 1).
Документы из уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент (Япония) № 1997-150638
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, в традиционном устройстве управления для устройства приведения в движение гибридного транспортного средства, имеется проблема в том, что когда частота вращения электромотора-генератора превышает предварительно определенную частоту вращения в гибридном транспортном средстве, в котором водитель может выбирать ступень переключения передач, ступень переключения передач переводится на ступень переключения передач, отличную от выбранной ступени, вопреки желанию водителя.
[0005] С учетом проблемы, описанной выше, задача настоящего изобретения заключается в том, чтобы предоставлять устройство управления гибридного транспортного средства, которое выполнено с возможностью удовлетворять запрос на вспомогательный режим или запрос на генерирование мощности при учитывании запроса на движение с высокой нагрузкой от водителя.
Средство, используемое для решения задач
[0006] Чтобы решать вышеуказанную задачу, устройство управления для гибридного транспортного средства настоящего изобретения содержит, в приводной системе: двигатель; электромотор-генератор, с которым соединяется аккумулятор, который выполняет зарядку/разрядку; трансмиссию, в которой передаточное отношение может быть фиксированным посредством намерения водителя; и ведущие колеса.
Помимо этого, устройство управления содержит вспомогательный режим движения, в котором электромотор-генератор выводит крутящий момент приведения в движение, и режим движения с генерированием с использованием двигателя, в котором электромотор-генератор выводит крутящий момент генерирования мощности, в качестве гибридных режимов, в которых двигатель и электромотор-генератор представляют собой источники приведения в движение.
Это устройство управления для гибридного транспортного средства содержит: средство задания предела частоты вращения, которое задает значение, которое превышает верхний предел частоты вращения, при котором электромотор-генератор может выполнять вывод крутящего момента, в качестве предела частоты вращения для частоты вращения узла "двигатель-электромотор"; и средство управления пределом частоты вращения для уменьшения предела частоты вращения до частоты вращения, при которой электромотор-генератор может выполнять вывод крутящего момента, когда частота вращения узла "двигатель-электромотор" достигает предела частоты вращения, и возникает запрос на вывод крутящего момента электромотора-генератора, в ходе вспомогательного режима движения, в состоянии, в котором передаточное отношение является фиксированным посредством намерения водителя.
Преимущества изобретения
[0007] Таким образом, устройство управления содержит средство задания предела частоты вращения для задания предела частоты вращения для частоты вращения узла "двигатель-электромотор" и средство управления пределом частоты вращения для уменьшения этого предела частоты вращения до частоты вращения, при которой электромотор-генератор может выполнять вывод крутящего момента. Другими словами, в ходе вспомогательного режима движения, когда частота вращения узла "двигатель-электромотор" достигает предела частоты вращения, заданного посредством средства задания предела частоты вращения, и когда возникает запрос на вывод крутящего момента электромотора-генератора, предел частоты вращения уменьшается в состоянии, в котором передаточное отношение является фиксированным посредством намерения водителя. Соответственно, отражение запроса на движение с высокой нагрузкой водителя становится возможным без переключения передачи "вверх" для повышения передаточного отношения.
Кроме того, поскольку предел частоты вращения, который задается посредством средства задания предела частоты вращения, уменьшается до предела частоты вращения, при котором электромотор-генератор может выполнять вывод крутящего момента, запрос на вывод крутящего момента электромотора-генератора может удовлетворяться, будь то для крутящего момента приведения в движение или для крутящего момента генерирования мощности.
Как результат, запрос на вспомогательный режим или запрос на генерирование мощности может удовлетворяться при отражении запроса на движение с высокой нагрузкой водителя.
Краткое описание чертежей
[0008] Фиг. 1 является общим системным видом, иллюстрирующим заднеприводное гибридное транспортное средство FR-типа (один пример электромобиля), к которому применяется устройство управления первого варианта осуществления.
Фиг. 2 является блок-схемой управления, иллюстрирующей этапы вычисления, которые выполняются в интегрированном контроллере 10 гибридного транспортного средства FR-типа, к которому применяется устройство управления первого варианта осуществления.
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию процессора управления пределом частоты вращения гибридного транспортного средства FR-типа, к которому применяется устройство управления первого варианта осуществления.
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей этапы в системе управления гибридным транспортным средством FR-типа, к которому применяется процессор 410 управления пределом частоты вращения первого варианта осуществления.
Фиг. 5 является временной диаграммой, иллюстрирующей функциональный пример операции обработки управления пределом частоты вращения первого варианта осуществления.
Фиг. 6 является временной диаграммой, иллюстрирующей функциональный пример операции регулирования предела частоты вращения посредством SOC аккумулятора первого варианта осуществления.
Фиг. 7 является временной диаграммой, иллюстрирующей функциональный пример операции регулирования предела частоты вращения посредством потребления мощности вспомогательного оборудования первого варианта осуществления.
Фиг. 8 является временной диаграммой, иллюстрирующей функциональный пример операции управления определением временной задержки выполнения уменьшения предела частоты вращения первого варианта осуществления.
Фиг. 9 является временной диаграммой, иллюстрирующей функциональный пример операции управления отклонением предела частоты вращения посредством намерения ускорения водителя.
Предпочтительные варианты осуществления изобретения
[0009] Ниже описывается предпочтительный вариант осуществления для реализации устройства управления гибридного транспортного средства настоящего изобретения на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0010] Сначала описывается конфигурация.
Фиг. 1 является общим системным видом, иллюстрирующим заднеприводное гибридное транспортное средство FR-типа (один пример электромобиля), к которому применяется устройство управления первого варианта осуществления.
[0011] Приводная система гибридного транспортного средства FR-типа первого варианта осуществления содержит двигатель Eng, маховик FW, первую муфту CL1, электромотор/генератор MG (приводной электромотор), вторую муфту CL2, автоматическую трансмиссию AT, карданный вал PS (ведущий вал), дифференциал DF, левый ведущий вал DSL, правый ведущий вал DSR, левое заднее колесо RL (ведущее колесо) и правое заднее колесо RR (ведущее колесо), как проиллюстрировано на фиг. 1. FL представляет собой левое переднее колесо, а FR представляет собой правое переднее колесо.
[0012] Двигатель Eng представляет собой бензиновый двигатель или дизельный двигатель, в котором выполняется управление запуском двигателя, управление остановкой двигателя, управление открытием клапана дроссельного клапана, управление отсечкой топлива и т.п. на основе команд управления двигателем из контроллера 1 двигателя. Маховик FW предоставляется на выходном валу двигателя.
[0013] Первая муфта CL1 представляет собой муфту, которая размещается между двигателем Eng и электромотором/генератором MG, в которой зацепление/зацепление в режиме проскальзывания (состояние полумуфты)/расцепление управляются посредством управляющего гидравлического давления первой муфты, сформированного посредством гидравлического узла 6 первой муфты на основе команды управления первой муфтой из контроллера 5 первой муфты. Один пример первой муфты CL1, которая должна использоваться, представляет собой нормально закрытую однодисковую сухую муфту, в которой этапы от зацепления в режиме проскальзывания до полного расцепления управляются посредством управления длиной хода, с использованием гидравлического исполнительного механизма (актуатора) 14, имеющего поршень 14a, который поддерживает полное зацепление посредством силы смещения диафрагменной пружины.
[0014] Электромотор/генератор MG представляет собой синхронный электромотор/генератор, в котором постоянный магнит встраивается в ротор, и обмотка статора наматывается на статоре, и который управляется посредством приложения трехфазного переменного тока, который формируется посредством инвертора 3 на основе команды управления из контроллера 2 электромотора. Этот электромотор/генератор MG может работать в качестве электромотора, который вращательно приводится в действие посредством приема электропитания из аккумулятора 4 (этот рабочий режим в дальнейшем называется "подачей питания"), либо может выступать в качестве электрогенератора, который формирует электродвижущую силу на обоих концах обмотки статора и заряжает аккумулятор 4, когда ротор принимает вращательную энергию из двигателя Eng или ведущих колес (этот рабочий режим в дальнейшем называется "рекуперацией"). Ротор этого электромотора/генератора MG соединяется со входным трансмиссионным валом автоматической трансмиссии AT через демпфер.
[0015] Вторая муфта CL2 представляет собой муфту, которая размещается между левым и правым задними колесами RL, RR и электромотором/генератором MG, в которой зацепление/зацепление в режиме проскальзывания/расцепление управляются посредством управляющего гидравлического давления, сформированного посредством гидравлического узла 8 второй муфты на основе команды управления второй муфтой из AT-контроллера 7. Примеры второй муфты CL2, которая должна использоваться, включают в себя нормально открытую мокрую многодисковую муфту или мокрый многодисковый тормоз, который может непрерывно управлять объемом расхода масла и гидравлическим давлением с помощью пропорционального соленоида. Гидравлический узел 6 первой муфты и гидравлический узел 8 второй муфты включены в гидравлический регулирующий клапанный узел CVU AT, который предусмотрен в автоматической трансмиссии AT.
[0016] Автоматическая трансмиссия AT (трансмиссия) представляет собой ступенчатую трансмиссию, в которой ступени шагового переключения передач (передаточные числа), например, с семью передачами переднего хода/одной передачей заднего хода, автоматически переключаются в соответствии со скоростью транспортного средства, величиной открытия позиции педали акселератора и т.п., и вторая муфта CL2 представляет собой не муфту, которая добавляется заново в качестве выделенной муфты, а муфту, в которой оптимальное сцепление или тормоз, которые располагаются в тракте передачи крутящего момента, выбирается из множества фрикционных зацепляющих элементов, которые зацепляются на каждой ступени переключения передач автоматической трансмиссии AT. В этой автоматической трансмиссии AT, ступень переключения передач может фиксироваться (например, как вторая, низкая и т.д.) посредством нажатия водителем рычага переключения диапазона передач (намерения водителя). Выходной вал автоматической трансмиссии AT соединяется с левым и правым задними колесами RL, RR через карданный вал PS, дифференциал DF, левый ведущий вал DSL и правый ведущий вал DSR.
[0017] Гибридная приводная система первого варианта осуществления содержит такие режимы движения, как режим движения электромобиля (в дальнейшем называемый "EV-режимом"), режим движения гибридного транспортного средства (или гибридный режим, в дальнейшем называемый "HEV-режимом") и режим движения за счет управления крутящим моментом приведения в движение (в дальнейшем называемый "WSC-режимом").
[0018] "EV-режим" представляет собой режим, в котором первая муфта CL1 расцепляется, и в котором движение выполняется с помощью электромотора/генератора MG в качестве единственного источника приведения в движение. "HEV-режим" представляет собой режим, в котором первая муфта CL1 зацепляется, и в котором движение выполняется с помощью двигателя Eng и электромотора/генератора MG в качестве источников приведения в движение. Этот "HEV-режим" представляет собой режим, в котором движение выполняется посредством одного из следующих режимов: вспомогательный режим движения; режим движения с генерированием с использованием двигателя; или режим движения за счет двигателя. "WSC-режим" представляет собой режим, в котором начало движения выполняется в то время, когда состояние зацепления в режиме проскальзывания второй муфты CL2 поддерживается посредством управления частотой вращения электромотора/генератора MG, и перегрузочная способность по крутящему моменту муфты управляется таким образом, что передаточный крутящий момент муфты, который проходит через вторую муфту CL2, становится требуемым крутящим моментом приведения в движение, который определяется в соответствии с состоянием транспортного средства или операцией водителя, во время начала движения посредством выбора P, N -> D из "HEV-режима", либо во время начала движения в D-диапазоне из "EV-режима" или "HEV-режима". Между тем, "WSC" является сокращением для "плавного запуска муфты".
[0019] Ниже описываются вышеуказанные вспомогательный режим движения/режим движения с генерированием с использованием двигателя/режим движения за счет двигателя. Во "вспомогательном режиме движения", ведущие колеса RL, RR движутся посредством мощности двигателя Eng и электромотора/генератора MG. Иными словами, электромотор/генератор MG выводит крутящий момент приведения в движение. В "режиме движения с генерированием с использованием двигателя", ведущие колеса RL, RR движутся посредством мощности двигателя Eng, и электромотор/генератор MG принудительно выступает в качестве генератора. В ходе работы на постоянной скорости или в ходе работы при ускорении, электромотор/генератор MG принудительно работает в качестве генератора посредством использования мощности двигателя Eng. Помимо этого, в ходе работы при замедлении, энергия торможения регенерируется, чтобы вырабатывать мощность с помощью электромотора/генератора MG, которая используется для зарядки аккумулятора 4. Иными словами, электромотор/генератор MG выводит крутящий момент генерирования мощности.
В "режиме движения за счет двигателя", ведущие колеса RL, RR движутся посредством мощности двигателя Eng.
[0020] Далее описывается система управления гибридным транспортным средством.
Система управления гибридным транспортным средством FR-типа согласно первому варианту осуществления сконфигурирована так, чтобы содержать контроллер 1 двигателя, контроллер 2 электромотора, инвертор 3, аккумулятор 4, контроллер 5 первой муфты, гидравлический узел 6 первой муфты, AT-контроллер 7, гидравлический узел 8 второй муфты, тормозной контроллер 9 и интегрированный контроллер 10, как проиллюстрировано на фиг. 1. Контроллер 1 двигателя, контроллер 2 электромотора, контроллер 5 первой муфты, AT-контроллер 7, тормозной контроллер 9, интегрированный контроллер 10 соединяются через линию 11 CAN-связи, которая обеспечивает возможность обмена информацией между ними.
[0021] Контроллер 1 двигателя вводит информацию частоты вращения двигателя из датчика 12 частоты вращения двигателя, команду управления целевым крутящим моментом двигателя из интегрированного контроллера 10 и другую необходимую информацию. Контроллер затем выводит команду для управления рабочей точкой двигателя (Ne: частота вращения двигателя, Te: выходной крутящий момент двигателя) в исполнительный механизм дроссельного клапана двигателя Eng и т.п.
[0022] Контроллер 2 электромотора вводит информацию из кругового датчика 13 позиции, который определяет позицию вращения ротора электромотора/генератора MG, команду управления целевым крутящим моментом MG и команду управления целевой частотой вращения MG из интегрированного контроллера 10 и другую необходимую информацию. Контроллер затем выводит команду для управления рабочей точкой электромотора (Nm: частота вращения электромотора, Tm: выходной крутящий момент электромотора) электромотора/генератора MG в инвертор 3. Этот контроллер 2 электромотора отслеживает SOC аккумулятора, которое представляет зарядную емкость аккумулятора 4, и эта информация SOC аккумулятора используется для управляющей информации электромотора/генератора MG и подается в интегрированный контроллер 10 через линию 11 CAN-связи.
[0023] Контроллер 5 первой муфты вводит информацию датчиков из датчика 15 хода первой муфты, который определяет позицию хода поршня 14a гидравлического исполнительного механизма 14, команду управления целевым крутящим моментом CL1 из интегрированного контроллера 10 и другую необходимую информацию. Затем контроллер выводит команду для того, чтобы управлять зацеплением/зацеплением в режиме проскальзывания/расцеплением первой муфты CL1, в гидравлический узел 6 первой муфты в гидравлическом регулирующем клапанном узле CVU AT.
[0024] AT-контроллер 7 вводит информацию из датчика 16 величины открытия позиции педали акселератора, датчика 17 скорости транспортного средства, других датчиков 18 (датчика частоты вращения входного трансмиссионного вала и т.д.) и информацию из переключателя 7a режима движения, который выводит сигнал (позиционный сигнал диапазона передач AT), соответствующий позиции рычага переключения диапазона передач, который управляется водителем. Затем при движении при выборе D-диапазона, выполняется поиск оптимальной ступени переключения передач из позиций, в которых рабочая точка, определенная из величины APO открытия позиции педали акселератора и скорости VSP транспортного средства, существует на карте переключения передач, и команда управления для получения искомой ступени переключения передач выводится в гидравлический регулирующий клапанный узел CVU AT. Карта переключения передач является картой, в которой записываются линия переключения передачи "вверх" и линия переключения передачи "вниз" в соответствии с величиной открытия позиции педали акселератора и скоростью транспортного средства. В дополнение к управлению автоматической трансмиссией, описанному выше, когда команда управления целевым крутящим моментом CL2 вводится из интегрированного контроллера 10, выполняется управление второй муфтой, при котором команда для того, чтобы управлять зацеплением в режиме проскальзывания второй муфты CL2, выводится в гидравлический узел 8 второй муфты в гидравлическом регулирующем клапанном узле CVU AT. Дополнительно, когда команда изменения режима управления трансмиссией выводится из интегрированного контроллера 10, управление трансмиссией в соответствии с командой изменения режима управления трансмиссией выполняется вместо нормального управления трансмиссией.
[0025] Тормозной контроллер 9 вводит информацию датчиков из датчика 19 скорости вращения колес, который определяет каждую из скоростей вращения колес для четырех колес, и датчика 20 хода тормоза, команду совместного рекуперативного управления из интегрированного контроллера 10 и другую необходимую информацию. Затем, например, когда рекуперативная тормозная сила является недостаточной относительно запрашиваемой тормозной силы, определенной из хода BS тормоза при торможении посредством нажатия педали тормоза, совместное управление рекуперативным тормозом выполняется с тем, чтобы компенсировать отсутствие посредством механической тормозной силы (гидравлической тормозной силы или тормозной силы электромотора).
[0026] Интегрированный контроллер 10 управляет энергопотреблением всего транспортного средства и предполагает функцию работы транспортного средства с максимальной эффективностью; в него вводится необходимая информация из датчика 21 частоты вращения электромотора, который определяет частоту Nm вращения электромотора, из датчика 22 продольного ускорения (средства определения ускорения), который определяет продольное ускорение, и из других сенсорных переключателей 23, а также информация через линию 11 CAN-связи. Затем команда управления целевым крутящим моментом двигателя выводится в контроллер 1 двигателя, команда управления целевым крутящим моментом MG и команда управления целевой частотой вращения MG выводятся в контроллер 2 электромотора, команда управления целевым крутящим моментом CL1 выводится в контроллер 5 первой муфты, команда управления целевым крутящим моментом CL2 выводится в AT-контроллер 7, и команда совместного рекуперативного управления выводится в тормозной контроллер 9.
[0027] Фиг. 2 является блок-схемой управления, иллюстрирующей этапы вычисления, которые выполняются в интегрированном контроллере 10 гибридного транспортного средства FR-типа, к которому применяется устройство управления первого варианта осуществления. Ниже описываются тапы вычисления, которые выполняются в интегрированном контроллере 10 первого варианта осуществления, на основе фиг. 2.
[0028] Интегрированный контроллер 10 содержит модуль 100 вычисления целевой движущей силы, модуль 200 выбора режима, модуль 300 вычисления целевой мощности заряда/разряда, модуль 400 выдачи команд управления в рабочей точке и модуль 500 управления трансмиссией, как проиллюстрировано на фиг. 2.
[0029] В модуле 100 вычисления целевой движущей силы, целевая движущая сила tFo0 вычисляется из величины APO открытия позиции педали акселератора и скорости VSP транспортного средства, с использованием карты целевой движущей силы.
[0030] В модуле 200 выбора режима, целевой режим движения вычисляется с использованием предварительно определенной карты режимов. Карта режимов содержит "EV-режим движения", "WSC-режим движения" и "HEV-режим движения", и целевой режим движения вычисляется из величины APO открытия позиции педали акселератора и скорости VSP транспортного средства. В предварительно определенной области, в которой APO является небольшой, и VSP составляет предварительно определенное значение или меньше, выбирается "EV-режим движения". Тем не менее, даже если "EV-режим движения" выбирается, если SOC аккумулятора составляет предварительно определенное значение или меньше, "HEV-режим движения" или "WSC-режим движения" принудительно становятся целевым режимом движения. "WSC-режим движения" задается в области скоростей транспортного средства, которая ниже нижней предельной скорости VSP1 транспортного средства, соответствующей частоте вращения выходного трансмиссионного вала, когда автоматическая трансмиссия AT находится на первой ступени зубчатой передачи, в ходе вращения на холостом ходу двигателя. "WSC-режим движения" сконфигурирован выбираться, если "EV-режим движения" не может достигаться вследствие низкого SOC аккумулятора, когда транспортное средство начинает движение.
[0031] В модуле 300 вычисления целевой мощности заряда/разряда, целевая мощность tP заряда/разряда вычисляется из SOC аккумулятора, с использованием предварительно определенной карты целевой величины заряда/разряда.
[0032] В модуле 400 выдачи команд управления в рабочей точке, неустановившийся целевой крутящий момент двигателя, целевой крутящий момент MG, целевая перегрузочная способность по крутящему моменту CL2, целевое передаточное число (целевое AT-переключение) и команда управления соленоидным током CL1 вычисляются как целевые показатели наступления рабочей точки на основе входной информации, такой как величина APO открытия позиции педали акселератора, целевая движущая сила tFo0, целевой режим движения, скорость VSP транспортного средства и целевая мощность tP заряда/разряда. Затем эти результаты вычисления выводятся в каждый из контроллеров 1, 2, 5 и 7 через линию 11 CAN-связи.
[0033] Модуль 500 управления трансмиссией вычисляет команду управления соленоидным током AT для выполнения управления приведением в действие соленоидного клапана в автоматической трансмиссии AT из целевой перегрузочной способности по крутящему моменту CL2 и целевого передаточного числа (целевого AT-переключения), с тем чтобы достигать этих целевых показателей, согласно расписанию переключения передач из карты переключения передач. Карта переключения передач представляет собой карту, на которой целевая ступень зубчатой передачи задается заранее на основе скорости VSP транспортного средства и величины APO открытия позиции педали акселератора. В модуле 500 управления трансмиссией, следующая ступень переключения передач определяется из текущей ступени переключения передач на основе этих фрагментов информации, и муфта переключения передач управляется таким образом, чтобы переключать передачи, если возникает запрос на переключение передач.
[0034] Помимо этого, процессор 410 управления пределом частоты вращения предоставляется в модуле 400 выдачи команд управления в рабочей точке. Процессор 410 управления пределом частоты вращения выполняет управление пределом частоты вращения для частоты Nem вращения узла "двигатель-электромотор". Этот процессор 410 управления пределом частоты вращения содержит модуль 411 задания предела частоты вращения (средство задания предела частоты вращения), модуль 412 вычисления крутящего момента генерирования мощности, модуль 413 управления пределом частоты вращения (средство управления пределом частоты вращения), модуль 414 вычисления предела частоты вращения, включенный в модуль 413 управления пределом частоты вращения, модуль 415 вычисления целевого крутящего момента двигателя и модуль 416 вычисления целевого крутящего момента MG, как проиллюстрировано на фиг. 3.
[0035] В модуле 411 задания предела частоты вращения, задается предел La частоты вращения для частоты Nem вращения узла "двигатель-электромотор" на каждой из ступеней переключения передач. Предел La частоты вращения является верхним предельным значением частоты Nem вращения узла "двигатель-электромотор", которое является значением, которое превышает верхний предел частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента.
[0036] В модуле 412 вычисления крутящего момента генерирования мощности, крутящий момент генерирования мощности вычисляется на основе частоты Nem вращения узла "двигатель-электромотор", требования по накоплению емкости аккумулятора относительно аккумулятора 4, т.е. SOC аккумулятора и/или абсолютной величины потребления мощности вспомогательного оборудования. Относительно этого крутящего момента генерирования мощности, более высокий крутящий момент генерирования мощности вычисляется по мере того, как увеличивается требование по накоплению энергии относительно аккумулятора 4. Требование по накоплению энергии определяется как более высокое по мере того, как возрастает потребление мощности вспомогательного оборудования, и требование по накоплению энергии определяется как более высокое по мере того, как снижается SOC аккумулятора.
[0037] Модуль 413 управления пределом частоты вращения содержит модуль 414 вычисления предела частоты вращения и управляет пределом частоты вращения посредством ввода частоты Nem вращения узла "двигатель-электромотор", SOC аккумулятора, потребления мощности вспомогательного оборудования, предела La частоты вращения из модуля 411 задания предела частоты вращения и предела Lb частоты вращения из модуля 414 вычисления предела частоты вращения.
[0038] В модуле 414 вычисления предела частоты вращения, предел Lb частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента (в этом случае, крутящего момента генерирования мощности), вычисляется на основе требования по накоплению энергии относительно аккумулятора 4, т.е. SOC аккумулятора и/или абсолютной величины потребления мощности вспомогательного оборудования, которая потребляется посредством множества видов вспомогательного оборудования (например, кондиционера, передних фар и т.д.), предоставленного для транспортного средства. Относительно этого предела Lb частоты вращения, меньшее значение вычисляется по мере того, как увеличивается требование по накоплению энергии относительно аккумулятора 4. Например, требование по накоплению энергии определяется как более высокое по мере того, как возрастает потребление мощности вспомогательного оборудования, и требование по накоплению энергии определяется как более высокое по мере того, как снижается SOC аккумулятора. Иными словами, значение предела Lb частоты вращения варьируется в соответствии с требованием по накоплению энергии относительно аккумулятора 4.
[0039] В модуле 413 управления пределом частоты вращения, выполняются три вида управления: управление пределом частоты вращения, управление определением времени выполнения уменьшения предела частоты вращения и управление отклонением предела частоты вращения. Эти виды управления описываются по порядку ниже.
[0040] Во-первых, описывается управление пределом частоты вращения. В состоянии, в котором ступень переключения передач является фиксированной посредством намерения водителя, в ходе вспомогательного режима движения, когда частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения, и когда запрос на вывод крутящего момента (в этом случае, запрос на вывод крутящего момента генерирования мощности) электромотора/генератора MG удовлетворяет определенному условию управления пределом частоты вращения, выполняется управление пределом частоты вращения. При управлении пределом частоты вращения выполняется управление, при котором предел La частоты вращения, заданный посредством модуля 411 задания предела частоты вращения, уменьшается до предела Lb частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента. Иными словами, вспомогательный режим движения становится режимом движения с генерированием с использованием двигателя. Помимо этого, при уменьшении предела La частоты вращения до предела Lb частоты вращения, уменьшение выполняется с предварительно определенной скоростью изменения, которая не влияет на поведение (работу) транспортного средства. Когда условие управления пределом частоты вращения не удовлетворяется, это управление не выполняется, и предел La частоты вращения поддерживается.
[0041] Запрос на вывод крутящего момента генерирования мощности определяет присутствие/отсутствие этого запроса на основе SOC аккумулятора и/или абсолютной величины потребления мощности вспомогательного оборудования. Например, когда SOC аккумулятора равно или меньше предварительно определенного порогового значения, либо когда выводится потребление мощности вспомогательного оборудования, определяется, что присутствует запрос на вывод крутящего момента генерирования мощности.
[0042] Далее описывается управление определением времени выполнения уменьшения предела частоты вращения. Управление определением времени выполнения уменьшения предела частоты вращения, которое определяет время выполнения (=начальное время) для уменьшения предела La частоты вращения, выполняется. Определение этого времени выполнения выполняется в соответствии с требованием по накоплению энергии относительно SOC аккумулятора. Например, это требование по накоплению энергии представляет собой, по меньшей мере, SOC аккумулятора.
[0043] Время выполнения для уменьшения этого предела La частоты вращения – это когда SOC аккумулятора равно или меньше порогового значения A (например, 40%). Например, пороговое значение A является значением, при котором зарядка принудительно начинается даже в ходе вспомогательного режима движения, поскольку необходимо заряжать SOC аккумулятора, когда характеристика движения транспортного средства, к которому применяется первый вариант осуществления, представляет собой нормальный режим движения (режим, который уделяет особое внимание рабочим характеристикам нормального движения). Зарядка начинается при предоставлении допустимого запаса для SOC аккумулятора. Нормальный режим движения представляет собой режим движения в ходе нормального движения, в котором, по меньшей мере, одна из числа характеристики переключения передач автоматической трансмиссии, выходной характеристики двигателя, характеристики подвески и т.п. задается равной характеристике, подходящей для нормального движения.
[0044] Это время выполнения, по существу, является идентичным "запросу на вывод крутящего момента генерирования мощности электромотора/генератора MG", описанному относительно управления пределом частоты вращения. Тем не менее, когда SOC аккумулятора не равно или меньше порогового значения A, и потребление мощности вспомогательного оборудования может компенсироваться посредством SOC аккумулятора, уменьшение предела La частоты вращения не выполняется до тех пор, пока SOC аккумулятора не станет равным или меньше порогового значения A. Иными словами, когда запрос на вывод крутящего момента служит только для компенсации потребления мощности вспомогательного оборудования, не выполняется определение в качестве времени выполнения для уменьшения предела La частоты вращения.
[0045] Далее описывается управление отклонением предела частоты вращения.
Когда удовлетворяется условие отклонения, при котором частота Nem вращения узла "двигатель-электромотор" отклоняется от предела Lb частоты вращения (уменьшенного предела частоты вращения), выполняется управление отклонением предела частоты вращения, которое восстанавливает предел Lb частоты вращения до предела La частоты вращения.
[0046] Это условие отклонения должно быть "когда частота Nem вращения узла "двигатель-электромотор" уменьшается до равной или меньшей предварительно определенного значения (порогового значения C)". Например, предварительно определенное значение (пороговое значение C) является значением, которое не включает себя ошибку в частоте Nem вращения узла "двигатель-электромотор", и значением, которое не включает в себя нестабильные состояния, в которых частота Nem вращения узла "двигатель-электромотор" многократно увеличивается до предела частоты вращения и уменьшается с предела частоты вращения.
Здесь, режим движения с генерированием с использованием двигателя, например, завершается, когда SOC аккумулятора заряжается до порогового значения A' (например, 60% или больше), и в первом варианте осуществления продолжается до тех пор, пока условие отклонения не будет удовлетворено. EV-режим движения становится просто выбирать посредством заряда SOC аккумулятора до этого порогового значения A'. Соответственно, пороговое значение A' является значением, при котором может повышаться экономия топлива (например, 60% или больше).
[0047] В модуль 415 вычисления целевого крутящего момента двигателя, вводятся крутящий момент генерирования мощности из модуля 412 вычисления крутящего момента генерирования мощности и предел частоты вращения из модуля 413 управления пределом частоты вращения, чтобы вычислять целевой крутящий момент двигателя. Затем этот результат вычисления выводится в контроллер 1 двигателя через линию 11 CAN-связи.
[0048] В модуль 416 вычисления целевого крутящего момента MG, вводится крутящий момент генерирования мощности из модуля 412 вычисления крутящего момента генерирования мощности, чтобы вычислять целевой крутящий момент электромотора. Этот результат вычисления выводится в контроллер 2 электромотора через линию 11 CAN-связи.
[0049] Далее описываются этапы в системе управления гибридным транспортным средством FR-типа, к которому применяется процессор 410 управления пределом частоты вращения первого варианта осуществления.
Каждый этап описывается ниже на основе блок-схемы последовательности операций способа по фиг. 4.
[0050] На этапе S1 определяется то, является или нет фиксированной ступень переключения передач посредством намерения водителя. Если "Да" (фиксированное состояние ступени переключения передач), этапы переходят к этапу S2. Если "Нет" (автоматическое регулирование ступеней переключения передач), этап S1 повторяется.
[0051] На этапе S2, после определения фиксированного состояния ступени переключения передач на этапе S1, определяется то, достигает или нет частота Nem вращения узла "двигатель-электромотор" предела La частоты вращения. Если "Да" (частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения), крутящий момент двигателя уменьшается, и этапы переходят к этапу S3. Если "Нет" (частота Nem вращения узла "двигатель-электромотор" не достигает предела La частоты вращения), этап S2 повторяется.
[0052] На этапе S3, после определения того, что частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения на этапе S2, определяется то, равно или меньше либо нет SOC аккумулятора порогового значения A. Иными словами, поскольку запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG присутствует, выполняется определение в качестве времени выполнения для уменьшения предела La частоты вращения. Если "Да" (SOC аккумулятора равно или меньше порогового значения A), этапы переходят к этапу S4. Если "Нет" (SOC аккумулятора превышает пороговое значение A), этап S3 повторяется.
[0053] На этапе S4, после определения того, что SOC аккумулятора равно или меньше порогового значения A на этапе S3, вычисляются предел Lb1 частоты вращения и крутящий момент генерирования мощности, соответствующие SOC аккумулятора, и этапы переходят к этапу S5.
[0054] На этапе S5, после вычисления предела Lb1 частоты вращения и крутящего момента генерирования мощности на этапе S4, крутящий момент двигателя, крутящий момент электромотора и предел частоты вращения управляются на основе этих результатов вычисления, и этапы переходят к этапу S6.
[0055] На этапе S6, после управления крутящим моментом двигателя, крутящим моментом электромотора и пределом частоты вращения на этапе S5, определяется то, увеличено или нет потребление мощности вспомогательного оборудования. Иными словами, случай, когда снова возникает запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG. Если "Да" (потребление мощности вспомогательного оборудования увеличено), этапы переходят к этапу S7. Если "Нет" (потребление мощности вспомогательного оборудования не увеличено), этап S6 повторяется.
[0056] На этапе S7, после определения того, что потребление мощности вспомогательного оборудования увеличено, на этапе S6, вычисляются предел Lb2 частоты вращения и крутящий момент генерирования мощности, соответствующие потреблению мощности вспомогательного оборудования и SOC аккумулятора, и этапы переходят к этапу S8. Предел Lb2 частоты вращения является меньшим значением, чем предел Lb1 частоты вращения, и вывод крутящего момента генерирования мощности на этапе S7 превышает вывод крутящего момента генерирования мощности на этапе S5.
[0057] На этапе S8, после вычисления предела Lb2 частоты вращения и крутящего момента генерирования мощности на этапе S7, крутящий момент двигателя, крутящий момент электромотора и предел частоты вращения управляются на основе этих результатов вычисления, и этапы переходят к этапу S9.
[0058] На этапе S9, после управления пределом Lb2 частоты вращения и крутящим моментом электромотора на этапе S8, определяется то, удовлетворено или нет условие отклонения. Это условие отклонения, как описано выше, представляет собой "когда частота Nem вращения узла "двигатель-электромотор" уменьшается до равной или меньшей предварительно определенного значения (порогового значения C)". Если "Да" (условие отклонения удовлетворено), этапы переходят к этапу S10. Если "Нет" (условие отклонения не удовлетворено), этап S9 повторяется.
[0059] На этапе S10, после удовлетворения условия отклонения на этапе S9, предел Lb2 частоты вращения восстановлен до предела La частоты вращения, и этапы переходят к завершению.
[0060] Далее описываются операции.
"Операция обработки управления пределом частоты вращения", "операция управления пределом частоты вращения", "операция регулирования предела частоты вращения", "управление определением времени выполнения уменьшения предела частоты вращения" и "операция управления отклонением предела частоты вращения" отдельно описываются относительно операций в первом варианте осуществления.
[0061] Операция обработки управления пределом частоты вращения
Во-первых, из операций в ходе процесса управления пределом частоты вращения, управление пределом частоты вращения, которое уменьшает предел La частоты вращения до предела Lb1 частоты вращения, представляет собой последовательность операций: "этап S1 -> этап S2 -> этап S3 -> этап S4 -> этап S5" на блок-схеме последовательности операций способа на фиг. 4. Иными словами, управление пределом частоты вращения выполняется, когда частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения, и SOC аккумулятора равно или меньше порогового значения A в фиксированном состоянии ступени переключения передач. Иными словами, предел Lb1 частоты вращения, соответствующий SOC аккумулятора, вычисляется посредством модуля 414 вычисления предела частоты вращения на этапе S4, и крутящий момент генерирования мощности, соответствующий SOC аккумулятора, вычисляется посредством модуля 412 вычисления крутящего момента генерирования мощности.
Дополнительно, выполняется управление пределом частоты вращения, при котором предел La частоты вращения уменьшается до предела Lb частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента посредством модуля 413 управления пределом частоты вращения, на этапе S5. Иными словами, крутящий момент двигателя, крутящий момент электромотора и предел La частоты вращения управляются на основе результатов вычисленного предела Lb1 частоты вращения и крутящего момента генерирования мощности. Поскольку электромотор/генератор MG в силу этого может выполнять вывод крутящего момента, крутящий момент генерирования мощности выводится.
[0062] Затем, из операций в ходе процесса управления пределом частоты вращения, управление определением времени выполнения уменьшения предела частоты вращения, которое определяет время выполнения для уменьшения предела La частоты вращения, представляет собой этап S3 на блок-схеме последовательности операций способа на фиг. 4. Иными словами, в случае "Да" на этапе S3, поскольку запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG присутствует, выполняется определение в качестве времени выполнения для уменьшения предела La частоты вращения. В случае "Нет" на этапе S3, не выполняется определение в качестве времени выполнения для уменьшения предела La частоты вращения.
[0063] Затем, управление пределом частоты вращения, при котором предел La частоты вращения уменьшается до предела Lb1 частоты вращения, после которого предел частоты вращения уменьшается снова, представляет собой последовательность операций: "этап S6 -> этап S7 -> этап S8" на блок-схеме последовательности операций способа на фиг. 4. Иными словами, управление пределом частоты вращения выполняется, когда снова возникает запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG вследствие повышения в потреблении мощности вспомогательного оборудования. Иными словами, предел Lb2 частоты вращения, соответствующий потреблению мощности вспомогательного оборудования и SOC аккумулятора, вычисляется посредством модуля 414 вычисления предела частоты вращения на этапе S7, и крутящий момент генерирования мощности, соответствующий потреблению мощности вспомогательного оборудования и SOC аккумулятора, вычисляется посредством модуля 412 вычисления крутящего момента генерирования мощности.
Дополнительно, выполняется управление пределом частоты вращения, при котором предел Lb1 частоты вращения уменьшается до предела Lb2 частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента посредством модуля 413 управления пределом частоты вращения, на этапе S8. Иными словами, крутящий момент двигателя, крутящий момент электромотора и предел Lb1 частоты вращения управляются на основе результатов вычисленного предела Lb2 частоты вращения и крутящего момента генерирования мощности. Поскольку электромотор/генератор MG в силу этого может выполнять вывод крутящего момента, крутящий момент генерирования мощности выводится.
[0064] Затем, из операций в ходе процесса управления пределом частоты вращения, управление отклонением предела частоты вращения, которое восстанавливает предел Lb частоты вращения до предела La частоты вращения, представляет собой последовательность операций: "этап S9 -> этап S10" на блок-схеме последовательности операций способа на фиг. 4. Иными словами, предел Lb частоты вращения восстановлен до предела La частоты вращения, когда частота Nem вращения узла "двигатель-электромотор" уменьшается до равной или меньшей предварительно определенного значения (порогового значения C), удовлетворяя условию отклонения. Предел Lb частоты вращения, который уменьшен на две ступени, восстановлен до предела La частоты вращения, который задается посредством модуля 411 задания предела частоты вращения.
[0065] Далее описывается операция обработки управления пределом частоты вращения относительно каждого времени на основе примера работы, проиллюстрированного на временной диаграмме на фиг. 5. Вертикальная ось на фиг. 5 иллюстрирует, в порядке с начала, частоту Nem вращения узла "двигатель-электромотор" (сплошная линия) и предел частоты вращения для частоты Nem вращения узла "двигатель-электромотор" (пунктирная линия), крутящий момент двигателя (крутящий момент ENG) и крутящий момент электромотора-генератора (крутящий момент MG), потребление мощности вспомогательного оборудования, SOC аккумулятора, величину открытия позиции педали акселератора и определение времени выполнения уменьшения предела частоты вращения. Горизонтальная ось на фиг. 5 представляет время, и "t" представляет время. Относительно крутящего момента, положительная сторона является крутящим моментом приведения в движение, и отрицательная сторона является крутящим моментом генерирования мощности.
[0066] Во время t0, водитель начинает нажимать педаль акселератора, и вспомогательный режим движения начинается. В это время, выводится потребление мощности вспомогательного оборудования, которое компенсируется посредством SOC аккумулятора. Это время соответствует началу на блок-схеме последовательности операций способа на фиг. 4.
[0067] Между временем t0-t1 возникает фиксированное состояние ступени переключения передач, в котором ступень переключения передач является фиксированной посредством намерения водителя, до того как изменяется ступень переключения передач посредством автоматической трансмиссии AT. Состояние также может быть фиксированным состоянием ступени переключения передач во время t0. В это время, водитель нажимает педаль акселератора, и величина APO открытия позиции педали акселератора увеличивается. Как результат, частота Nem вращения узла "двигатель-электромотор", крутящий момент двигателя и крутящий момент электромотора увеличиваются. Помимо этого, в течение этого времени, поскольку потребление мощности вспомогательного оборудования компенсируется посредством SOC аккумулятора, SOC аккумулятора уменьшается. Затем величина APO открытия позиции педали акселератора становится постоянной в середине. Этот период представляет собой последовательность операций: "Начало -> этап S1 ("Да") -> этап S2 ("Нет")" на блок-схеме последовательности операций способа на фиг. 4, соответствующую повторению этапа S2. Когда этап S1 представляет собой "Нет", этапы не продолжаются после времени t1.
[0068] Время t1 является временем наступления предела частоты вращения, при котором частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения. В это время, уменьшение крутящего момента двигателя начинается от времени t1. Это служит для того, чтобы предотвращать избыточное повышение частоты вращения двигателя. Крутящий момент электромотора является нулевым, поскольку электромотор/генератор MG не находится на частоте Nem вращения узла "двигатель-электромотор", на которой возможен вывод крутящего момента. Тем не менее, вспомогательный режим движения продолжается по мере того, как крутящий момент электромотора равен нулю.
Дополнительно, поскольку потребление мощности вспомогательного оборудования выводится, присутствует запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG. Тем не менее, поскольку потребление мощности вспомогательного оборудования компенсируется посредством SOC аккумулятора, и SOC аккумулятора не равно или меньше порогового значения A, не выполняется определение в качестве времени выполнения для уменьшения предела La частоты вращения. Это время соответствует этапу S2 ("Да") на блок-схеме последовательности операций способа на фиг. 4.
[0069] Между временем t1-t2, поскольку потребление мощности вспомогательного оборудования непрерывно компенсируется посредством SOC аккумулятора от времени t0, SOC аккумулятора уменьшается, но SOC аккумулятора не равно или меньше порогового значения A. Этот период представляет собой последовательность операций "этап S2 ("Да") -> этап S3 ("Нет")" на блок-схеме последовательности операций способа на фиг. 4, соответствующую повторению этапа S3.
[0070] Во время t2, SOC аккумулятора равно или меньше порогового значения A. Иными словами, поскольку запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG присутствует, выполняется определение в качестве времени выполнения для уменьшения предела La частоты вращения (этап S3 ("Да")). В это время, применяется вспомогательный режим движения, и частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения. Соответственно, выполняется управление пределом частоты вращения, при котором предел La частоты вращения уменьшается до предела Lb1 частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента, так что SOC аккумулятора не уменьшается до значения, меньшего порогового значения A. Вывод крутящего момента генерирования мощности из электромотора/генератора MG начинается вместе с началом уменьшения предела La частоты вращения. Дополнительно, поскольку величина APO открытия позиции педали акселератора является постоянной, крутящий момент двигателя увеличивается в соответствии с величиной крутящего момента генерирования мощности электромотора/генератора MG, чтобы поддерживать движение. Вырабатываемая мощность может быть заряжена в аккумуляторе 4, и мощность заряда может использоваться для того, чтобы компенсировать потребление мощности вспомогательного оборудования, либо может быть непосредственно подана во вспомогательное оборудование без промежуточного размещения аккумулятора 4. Вспомогательный режим движения за счет этого переключается на режим движения с генерированием с использованием двигателя. Это время соответствует последовательности операций: "этап S3 ("Да") -> этап S4 -> этап S5" на блок-схеме последовательности операций способа на фиг. 4.
[0071] Между временем t2-t3, величина вырабатываемой мощности посредством крутящего момента генерирования мощности является величиной вырабатываемой мощности, которая может компенсировать потребление мощности вспомогательного оборудования, которая выводится, как проиллюстрировано на фиг. 5. Соответственно, SOC аккумулятора находится в состоянии поддержания порогового значения A. Этот период представляет собой последовательность операций: "этап S5 -> этап S6 ("Нет")" на блок-схеме последовательности операций способа на фиг. 4, соответствующую повторению этапа S6.
[0072] Во время t3, запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG присутствует снова вследствие повышения в потреблении мощности вспомогательного оборудования. В это время, требование по накоплению энергии становится выше до времени t3 вследствие повышения в потреблении мощности вспомогательного оборудования и зарядки SOC аккумулятора. Соответственно, предел Lb1 частоты вращения дополнительно уменьшен до предела Lb2 частоты вращения. Крутящий момент генерирования мощности выводится из электромотора/генератора MG вместе с уменьшением предела частоты вращения. Дополнительно, поскольку величина APO открытия позиции педали акселератора является постоянной, крутящий момент двигателя еще больше увеличивается в соответствии с величиной крутящего момента генерирования мощности электромотора/генератора MG, чтобы поддерживать движение. Вырабатываемая мощность заряжена в SOC аккумулятора, и часть заряженного аккумулятора компенсирует потребление мощности вспомогательного оборудования. Это время соответствует последовательности операций: "этап S6 ("Да") -> этап S7 -> этап S8" на блок-схеме последовательности операций способа на фиг. 4.
[0073] Между временем t3-t4, величина вырабатываемой мощности посредством крутящего момента генерирования мощности является величиной вырабатываемой мощности, которая может компенсировать потребление мощности вспомогательного оборудования, которая выводится, а также заряжать SOC аккумулятора, как проиллюстрировано на фиг. 5. SOC аккумулятора заряжается по этой причине. Поскольку скорость изменения предела частоты вращения ниже времени t2-t3, SOC аккумулятора увеличивается немного позднее уменьшения предела частоты вращения. Этот период представляет собой последовательность операций "этап S8 -> этап S9" ("Нет") на блок-схеме последовательности операций способа на фиг. 4, соответствующую повторению этапа S9.
[0074] Во время t4, SOC аккумулятора превышает пороговое значение A', но предел Lb2 частоты вращения не восстановлен до предела La частоты вращения, и текущее состояние поддерживается. Это время представляет собой этап S9 ("Нет") на блок-схеме последовательности операций способа на фиг. 4, соответствующий повторению этапа S9.
[0075] Между временем t4-t5, поскольку не удовлетворено условие отклонения, чтобы восстанавливать предел Lb2 частоты вращения до предела La частоты вращения, предел Lb2 частоты вращения поддерживается, и SOC аккумулятора продолжает повышаться. Этот период представляет собой этап S9 ("Нет") на блок-схеме последовательности операций способа на фиг. 4, соответствующий повторению этапа S9.
[0076] Во время t5, частота Nem вращения узла "двигатель-электромотор" и крутящий момент двигателя уменьшаются, в соответствии с уменьшением величины APO открытия позиции педали акселератора, которое начинается вследствие снятия водителем ноги с педали акселератора. Поскольку транспортное средство замедлено, электромотор/генератор MG выводит больший крутящий момент генерирования мощности. Это время представляет собой этап S9 ("Нет") на блок-схеме последовательности операций способа на фиг. 4, соответствующий повторению этапа S9.
[0077] Между временем t5-t6, величина APO открытия позиции педали акселератора непрерывно уменьшается, и частота Nem вращения узла "двигатель-электромотор", а также крутящий момент двигателя непрерывно уменьшаются от времени t5. Помимо этого, электромотор/генератор MG выводит больший крутящий момент генерирования мощности. Этот период представляет собой этап S9 ("Нет") на блок-схеме последовательности операций способа на фиг. 4, соответствующий повторению этапа S9.
[0078] Во время t6, частота Nem вращения узла "двигатель-электромотор" уменьшается до порогового значения C или меньше. Иными словами, поскольку условие отклонения удовлетворяется, предел Lb2 частоты вращения восстановлен до предела La частоты вращения. Это время соответствует последовательности операций: "этап S9 ("Да") -> этап S10" на блок-схеме последовательности операций способа на фиг. 4.
[0079] Между временем t6-t7, поскольку транспортное средство продолжает замедляться, электромотор/генератор MG, выводит больший крутящий момент генерирования мощности. Потребление мощности вспомогательного оборудования становится мощностью в середине времени t0-t3. Это время соответствует "этап S10 -> конец" на блок-схеме последовательности операций способа на фиг. 4.
[0080] Во время t7, частота Nem вращения узла "двигатель-электромотор" и крутящий момент двигателя увеличиваются, в соответствии с увеличением величины APO открытия позиции педали акселератора вследствие начала нажатия водителем педали акселератора. В это время, электромотор/генератор MG по-прежнему выводит крутящий момент генерирования мощности. Это время не имеет соответствующего этапа на блок-схеме последовательности операций способа на фиг. 4.
[0081] Между временем t7-t8, величина APO открытия позиции педали акселератора, вместе с частотой Nem вращения узла "двигатель-электромотор" и крутящим моментом двигателя, непрерывно увеличивается от времени t7. Помимо этого, электромотор/генератор MG переключается с вывода крутящего момента генерирования мощности на вывод крутящего момента приведения в движение. Если состояние становится фиксированным состоянием ступени переключения передач в течение этого времени, этот период представляет собой последовательность операций: "Начало -> этап S1 ("Да") -> этап S2 ("Нет")" на блок-схеме последовательности операций способа на фиг. 4, соответствующую повторению этапа S2. Другими словами, управление по фиг. 4 начинается.
[0082] Операции во время t8 являются идентичными операциям во время t1, так что их описания опускаются.
[0083] Операция управления пределом частоты вращения
Например, должны быть сравнительным примером устройство управления для устройства приведения в движение гибридного транспортного средства, оснащенного двигателем, электромотором-генератором и трансмиссией, содержащее средство параллельного гибридного управления для суммирования/вычитания выходной мощности электромотора-генератора с/из выходной мощности двигателя и средство управления переключением передачи "вверх" для переключения "вверх" передачи трансмиссии, когда частота вращения электромотора-генератора превышает предварительно определенную частоту вращения в ходе упомянутого параллельного гибридного управления. Устройство управления для устройства приведения в движение гибридного транспортного средства этого сравнительного примера выполнено с возможностью управлять трансмиссией таким образом, чтобы переключать передачу "вверх", чтобы уменьшать частоту вращения электромотора-генератора, когда частота вращения электромотора-генератора превышает предварительно определенную частоту вращения. Иными словами, устройство выполнено с возможностью осуществлять управление таким образом, чтобы переключать "вверх" передачу трансмиссии, чтобы удовлетворять запрос на вывод крутящего момента электромотора-генератора.
[0084] Тем не менее, когда частота вращения электромотора-генератора превышает предварительно определенную частоту вращения в гибридном транспортном средстве, в котором водитель может выбирать ступень переключения передач, ступень переключения передач переводится на ступень переключения передач, отличную от выбранной ступени, вопреки желанию водителя.
[0085] Таким образом, имеется проблема в том, что ступень переключения передач переводится на ступень переключения передач, отличную от выбранной ступени, вопреки желанию водителя.
[0086] Напротив, в первом варианте осуществления, использована конфигурация, которая содержит модуль 411 задания предела частоты вращения (средство задания предела частоты вращения) для задания предела La частоты вращения для частоты Nem вращения узла "двигатель-электромотор" и модуль 413 управления пределом частоты вращения (средства управления пределом частоты вращения) для уменьшения этого предела La частоты вращения до предела Lb частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента.
Другими словами, в ходе вспомогательного режима движения, когда частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения, заданного посредством модуля 411 задания предела частоты вращения, и когда возникает запрос на вывод крутящего момента электромотора/генератора MG, предел La частоты вращения уменьшается в состоянии (время t1-t2), в котором ступень переключения передач (передаточное отношение) является фиксированной. Соответственно, отражение запроса на движение с высокой нагрузкой водителя становится возможным без переключения передачи "вверх" для повышения передаточного отношения.
Кроме того, поскольку предел La частоты вращения, который задается посредством модуля 411 задания предела частоты вращения, уменьшается до предела Lb частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента (время t2, время t2-t3), запрос на вывод крутящего момента электромотора/генератора MG может удовлетворяться, даже для крутящего момента генерирования мощности. Дополнительно, запрос на вывод крутящего момента электромотора/генератора MG может удовлетворяться, даже для крутящего момента приведения в движение. Иными словами, мощность и рекуперация могут выполняться посредством электромотора/генератора MG. Соответственно, можно реагировать на гибридные режимы движения, такие как вспомогательный режим движения и режим движения с генерированием с использованием двигателя.
Как результат, запрос на вспомогательный режим или запрос на генерирование мощности может удовлетворяться при отражении запроса на движение с высокой нагрузкой водителя.
[0087] Операция регулирования предела частоты вращения
В первом варианте осуществления, использована конфигурация, в которой предел La частоты вращения уменьшается в большей степени по мере того, как требование по накоплению энергии относительно SOC аккумулятора становится более высоким.
[0088] Иными словами, предел частоты вращения уменьшается до предела Lb частоты вращения, соответствующего потреблению мощности вспомогательного оборудования и SOC аккумулятора, которые вводятся в модуль 414 вычисления предела частоты вращения (время t2-t3, время t3-t4).
[0089] Как результат, требование по накоплению электричества может надежно удовлетворяться посредством уменьшения до предела Lb частоты вращения, соответствующего требованию по накоплению энергии.
[0090] Помимо этого, требование по накоплению энергии выполнено с возможностью определяться как более высокое по мере того, как уменьшается SOC аккумулятора (операция регулирования предела частоты вращения посредством SOC аккумулятора).
Например, как проиллюстрировано посредством времени t2 на фиг. 5, предел La частоты вращения уменьшается до предела Lb1 частоты вращения, так что SOC аккумулятора не уменьшается до значения, меньшего порогового значения A. Соответственно, возможно недопущение уменьшения SOC аккумулятора до значения, меньшего порогового значения A.
[0091] Помимо этого, как проиллюстрировано посредством временной диаграммы на фиг. 6, предел La частоты вращения (пунктирная линия на фиг. 6) уменьшается до значения, меньшего предела Lb1 частоты вращения (штрихпунктирная линия на фиг. 6), проиллюстрированного посредством времени t2 на фиг. 5, когда SOC аккумулятора заряжено от порогового значения Z, которое ниже порогового значения A. Причина отличия наклона кривой уменьшения SOC аккумулятора для порогового значения A и порогового значения Z должна заключаться в абсолютной величине потребления мощности вспомогательного оборудования. Фиг. 6 является идентичным фиг. 5 за исключением такого аспекта, что предел La частоты вращения уменьшается в большей степени по мере того, как снижается SOC аккумулятора, и что потребление мощности вспомогательного оборудования и величина открытия позиции педали акселератора по фиг. 5 опускаются из вертикальной оси по фиг. 6; в силу этого, предоставляются идентичные названия и времена t, и их описания опускаются. Случай, в котором предел La частоты вращения уменьшается, когда SOC аккумулятора равно или меньше порогового значения A, проиллюстрирован посредством штрихпунктирной линии (предел частоты вращения проиллюстрирован посредством двойной штрихпунктирной линии). Дополнительно, такие операции, как восстановление предела Lb частоты вращения, опускаются на фиг. 6.
[0092] Посредством уменьшения предела La частоты вращения в большей степени по мере того, как снижается SOC аккумулятора таким способом, может увеличиваться величина генерирования мощности, и может увеличиваться SOC аккумулятора.
[0093] Как результат, SOC аккумулятора может увеличиваться, и становится просто выбирать EV-режим движения, обеспечивая возможность повышения эффективности использования топлива.
[0094] Кроме того, требование по накоплению энергии определяется как более высокое по мере того, как возрастает потребление мощности вспомогательного оборудования. Ниже подробно описывается эта операция регулирования предела частоты вращения посредством потребления мощности вспомогательного оборудования относительно временной диаграммы на фиг. 7.
Частям, идентичным частям по фиг. 5, присваиваются идентичные названия, и их описания опускаются.
Помимо этого, когда режим работы является идентичным режиму работы во время t на фиг. 5, время t по фиг. 5 предоставляется в круглых скобках, и его описание опускается. Вертикальная ось по фиг. 7 является идентичной вертикальной оси на фиг. 5 за исключением такого аспекта, что величина открытия позиции педали акселератора по фиг. 5 опускается.
[0095] Потребление мощности вспомогательного оборудования предположительно не выводится во время t10 (время t0), время t10-t11 (время t0-t1) и время t11 (время t1).
[0096] Между временем t11-t12, не выводится потребление мощности вспомогательного оборудования, и крутящий момент электромотора является нулевым, так что SOC аккумулятора является постоянным.
[0097] Во время t12, выводится потребление мощности вспомогательного оборудования. Иными словами, присутствует запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG. На фиг. 7, выполняется определение в качестве времени выполнения для уменьшения предела La частоты вращения вследствие вывода потребления мощности вспомогательного оборудования. Соответственно, предел La частоты вращения уменьшается до предела Lb частоты вращения, при котором может выводиться крутящий момент генерирования мощности, который может компенсировать потребление мощности вспомогательного оборудования. В противном случае, операции являются идентичными операциям во время t2, так что их описания опускаются.
[0098] Время t12-t13 является идентичным времени t2-t3.
[0099] Во время t13, потребление мощности вспомогательного оборудования увеличивается, так что предел частоты вращения еще больше уменьшается до предела Lb частоты вращения, при котором может выводиться крутящий момент генерирования мощности, который может компенсировать это потребление мощности вспомогательного оборудования. В противном случае, операции являются идентичными операциям во время t12, так что их описания опускаются.
[0100] Между временем t13-14, за исключением дополнительного уменьшения предела Lb частоты вращения в соответствии с увеличением потребления мощности вспомогательного оборудования, операции являются идентичными между временем t12-t13, так что их описания опускаются. Описания после времени t14 опускаются.
[0101] Иными словами, как проиллюстрировано между временем t12-t14 на временной диаграмме на фиг. 7, предел La частоты вращения уменьшается до предела Lb частоты вращения, при котором крутящий момент генерирования мощности, который может компенсировать потребление мощности вспомогательного оборудования, может выводиться, в соответствии с абсолютной величиной потребления мощности вспомогательного оборудования.
[0102] Как результат, посредством определения предела Lb частоты вращения как уменьшающегося в соответствии с абсолютной величиной потребления мощности вспомогательного оборудования, уменьшение SOC аккумулятора может предотвращаться без уменьшения предела La частоты вращения больше, чем требуется.
[0103] Операция управления определением времени выполнения уменьшения предела частоты вращения
В первом варианте осуществления, использована конфигурация, в которой время выполнения для уменьшения предела La частоты вращения определяется в соответствии с требованием по накоплению энергии относительно аккумулятора.
[0104] Иными словами, время выполнения для уменьшения предела La частоты вращения сдвигается в соответствии с требованием по накоплению энергии относительно SOC аккумулятора.
[0105] Как результат, можно уменьшать вероятность того, что водитель замечает, что предел La частоты вращения уменьшен.
[0106] В частности, посредством задания требования по накоплению энергии как, по меньшей мере, SOC аккумулятора, уменьшение предела La частоты вращения приостанавливается, даже если возникает потребление мощности вспомогательного оборудования (время t1-t2). Другими словами, когда SOC аккумулятора становится равным или меньше порогового значения A (время t2 и т.д.), предел La частоты вращения уменьшается таким образом, что он совпадает с зарядом SOC аккумулятора.
[0107] Как результат, можно еще более уменьшать вероятность того, что водитель замечает, что предел La частоты вращения уменьшен.
[0108] Помимо этого, использовано управление определением времени выполнения уменьшения предела частоты вращения, при котором, например, время выполнения задерживается в большей степени, если намерение ускорения водителя является сильным, по сравнению с тем, когда намерение ускорения водителя является слабым. Ниже описывается подробно эта операция управления определением временной задержки выполнения уменьшения предела частоты вращения относительно временной диаграммы на фиг. 8. Частям, идентичным частям по фиг. 5, присваиваются идентичные названия, и их описания опускаются. Помимо этого, когда режим работы является идентичным режиму работы во время t на фиг. 5, время t по фиг. 5 предоставляется в круглых скобках, и его описание опускается. Вертикальная ось по фиг. 8 является идентичной вертикальной оси на фиг. 5 за исключением такого аспекта, что потребление мощности вспомогательного оборудования (постоянное на фиг. 8) и величина открытия позиции педали акселератора по фиг. 5 опускаются, и что добавлен переключатель выбора режима приведения в движение (переключатель режима приведения в движение).
[0109] Этот переключатель представляет собой переключатель выбора для нормального режима движения (когда намерение ускорения водителя является слабым) или спортивного режима движения (когда намерение ускорения водителя является сильным). Нормальный режим движения является таким, как описано выше. В спортивном режиме движения (режиме, который уделяет особое внимание рабочим характеристикам по отклику), по меньшей мере, одна из характеристик, описанных для нормального режима движения, задается равной характеристике, подходящей для спортивного движения. Нагрузка становится более высокой в спортивном режиме движения.
[0110] Помимо этого, пороговое значение B SOC аккумулятора в случае спортивного режима движения является значением, при котором зарядка принудительно начинается даже в ходе вспомогательного режима движения, поскольку необходимо заряжать SOC аккумулятора. Иными словами, поскольку пороговое значение является пороговым значением A в нормальном режиме движения и пороговым значением B в спортивном режиме движения, пороговые значения SOC аккумулятора отличаются в этих режимах движения.
[0111] Переключатель выбора режима приведения в движение находится в нормальном режиме движения во время t20 (время t0), время t20-t21 (время t0-t1), время t21 (время t1) и время t21-t22 (время t1-t2). SOC аккумулятора уменьшается вследствие компенсации посредством SOC аккумулятора потребления мощности вспомогательного оборудования.
[0112] Во время t22, нормальный режим движения переключается на спортивный режим движения посредством нажатия водителем переключателя выбора режима приведения в движение. Соответственно, пороговое значение A SOC аккумулятора переключается на пороговое значение B. В это время, поскольку SOC аккумулятора равно или меньше порогового значения A в нормальном режиме движения, запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG присутствует, и выполняется определение в качестве времени для уменьшения предела La частоты вращения. Тем не менее, поскольку пороговое значение переключается на пороговое значение B SOC аккумулятора вместе с переключением на спортивный режим движения, время выполнения для уменьшения предела La частоты вращения также переключается. Другими словами, время выполнения для уменьшения предела La частоты вращения задерживается.
[0113] Между временем t22-t23, режим задается как спортивный режим движения. В течение этого времени, SOC аккумулятора уменьшается вследствие компенсации посредством SOC аккумулятора потребления мощности вспомогательного оборудования.
[0114] Во время t23, SOC аккумулятора равно или меньше порогового значения B в ходе спортивного режима движения. Иными словами, запрос на вывод крутящего момента генерирования мощности электромотора/генератора MG присутствует, и выполняется определение в качестве времени для уменьшения предела La частоты вращения. Соответственно, предел La частоты вращения уменьшается до предела Lb частоты вращения, при котором может выводиться крутящий момент генерирования мощности, который может заряжать SOC аккумулятора.
[0115] Между временем t23-t24, SOC аккумулятора заряжено от порогового значения B, которое ниже порогового значения A; в силу этого, как указано на фиг. 6, предел La частоты вращения уменьшается до значения, меньшего предела Lb частоты вращения в случае порогового значения B, по сравнению с пределом Lb1 частоты вращения в случае порогового значения A. В противном случае, операции являются идентичными операциям во время t4-t5, так что их описания опускаются. Описания после времени t24 опускаются.
[0116] Другими словами, время выполнения задерживается, как проиллюстрировано во время t22 на временной диаграмме на фиг. 8. Соответственно, в ходе спортивного режима движения (когда намерение ускорения водителя является сильным), больший приоритет отдается мощностным рабочим характеристикам, чем зарядке SOC аккумулятора.
[0117] Следовательно, в ходе спортивного режима движения (когда намерение ускорения водителя является сильным), и когда SOC аккумулятора становится равным или меньше порогового значения A, предел La частоты вращения не уменьшается; в силу этого, максимальная частота вращения двигателя Eng может быть полностью использована.
[0118] Как результат, критическое движение становится возможным без вызывания неудовлетворенности у водителя.
[0119] Операция управления отклонением предела частоты вращения
Использована конфигурация, в которой уменьшенный предел Lb частоты вращения восстановлен до предела La частоты вращения, который задается посредством модуля 411 задания предела частоты вращения, когда удовлетворяется условие отклонения, при котором частота Nem вращения узла "двигатель-электромотор" отклоняется от уменьшенного предела Lb частоты вращения.
[0120] Например, при восстановлении до предела La частоты вращения, когда SOC аккумулятора, разрешенное в режиме движения с генерированием с использованием двигателя, заряжено до порогового значения A', водитель может заметить и испытывать некомфортное ощущение.
[0121] Иными словами, поскольку предел La частоты вращения уменьшается во время, которое не замечается водителем, требуется условие отклонения, чтобы возвращать предел Lb частоты вращения к пределу La частоты вращения без замечания водителем (без вызывания дискомфорта).
[0122] Как результат, посредством восстановления до предела La частоты вращения, когда условие отклонения удовлетворяется (время t6), можно не позволять водителю заметить, что предел частоты вращения восстановлен.
[0123] В частности, посредством задания условия отклонения (время t6) как условия, когда частота Nem вращения узла "двигатель-электромотор" уменьшается до равной или меньшей порогового значения C, может предотвращаться неравномерное изменение частоты Nem вращения узла "двигатель-электромотор", вызываемое посредством повторяющегося уменьшения и восстановления предела La частоты вращения.
[0124] Как результат, можно еще более уменьшать вероятность того, что водитель замечает, что предел частоты вращения восстановлен.
[0125] Помимо этого, например, восстановление уменьшенного предела Lb частоты вращения до предела La частоты вращения, который задается посредством модуля 411 задания предела частоты вращения, когда намерение ускорения водителя является сильным, использовано в качестве условия отклонения. Ниже подробно описывается эта операция управления отклонением предела частоты вращения посредством намерения ускорения водителя относительно временной диаграммы на фиг. 9.
Частям, идентичным частям по фиг. 5, присваиваются идентичные названия, и их описания опускаются.
Помимо этого, когда режим работы является идентичным режиму работы во время t на фиг. 5, время t по фиг. 5 предоставляется в круглых скобках, и его описание опускается. Вертикальная ось на фиг. 9 является идентичной вертикальной оси на фиг. 5 за исключением такого аспекта, что потребление мощности вспомогательного оборудования (постоянное на фиг. 9) по фиг. 5 опускается.
[0126] Время t30 (время t0), время t30-t31 (время t0-t1), время t31 (время t1) и время t31-t32 (время t1-t2) является идентичными временам фиг. 5, так что их описания опускаются.
[0127] Во время t32, помимо задания предела La частоты вращения равным уменьшенному пределу Lb частоты вращения для зарядки SOC аккумулятора, операции являются идентичными операциям во время t3, так что их описания опускаются.
[0128] Между временем t32-t33, величина вырабатываемой мощности посредством крутящего момента генерирования мощности является величиной вырабатываемой мощности, которая может заряжать SOC аккумулятора, как проиллюстрировано на фиг. 9. SOC аккумулятора заряжено по этой причине.
[0129] Операции во время t33 (время t4) являются идентичными операциям по фиг. 5, так что их описания опускаются.
[0130] Между временем t33-t34, водитель нажимает педаль акселератора, и величина APO открытия позиции педали акселератора увеличивается. В противном случае, операции являются идентичными операциям во время t4-t5, так что их описания опускаются.
[0131] Во время t34, величина APO открытия позиции педали акселератора еще больше увеличивается, и намерение ускорения водителя является более сильным (более высокая нагрузка, например, спортивный режим движения). Иными словами, поскольку условие отклонения удовлетворяется, предел Lb частоты вращения восстановлен до предела La частоты вращения. Как результат, частота Nem вращения узла "двигатель-электромотор" и крутящий момент двигателя увеличиваются. В это время, электромотор/генератор MG по-прежнему выводит крутящий момент генерирования мощности.
[0132] Между временем t34-t35, частота Nem вращения узла "двигатель-электромотор" и крутящий момент двигателя увеличиваются, в соответствии с величиной APO открытия позиции педали акселератора. Дополнительно, электромотор/генератор MG крутящего момента двигателя по-прежнему выводит крутящий момент генерирования мощности. Описания после времени t34 опускаются.
[0133] Другими словами, поскольку предел Lb частоты вращения восстановлен до предела La частоты вращения, когда намерение ускорения водителя является сильным (время t34), можно не позволять водителю заметить, что предел частоты вращения восстановлен.
Помимо этого, если предел Lb частоты вращения не восстановлен в это время, не только дискомфорт, вызываемый у водителя, но также и потребности водителя не могут отражаться.
[0134] Как результат, можно уменьшать вероятность того, что водитель замечает, что предел частоты вращения уменьшен, и отражать потребности водителя даже при восстановлении предела частоты вращения.
[0135] Помимо этого, как проиллюстрировано посредством штрихпунктирной линии в величине APO открытия позиции педали акселератора по фиг. 9, когда SOC аккумулятора заряжается, и SOC аккумулятора меньше порогового значения A', предел Lb частоты вращения восстановлен до предела La частоты вращения, даже если намерение ускорения водителя становится более сильным.
[0136] Как результат, можно уменьшать вероятность того, что водитель замечает, что предел частоты вращения восстановлен, и отражать потребности водителя при восстановлении предела частоты вращения.
[0137] Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться за счет устройства управления гибридного транспортного средства FR-типа согласно первому варианту осуществления.
[0138] (1) Устройство управления для гибридного транспортного средства, содержащее, в приводной системе: двигатель Eng; электромотор/генератор MG, с которым соединяется аккумулятор 4, который выполняет зарядку/разрядку; трансмиссию (автоматическую трансмиссию AT), в которой передаточное отношение может быть фиксированным посредством намерения водителя; и ведущие колеса (левое заднее колесо RL, правое заднее колесо RR), дополнительно содержащее:
- вспомогательный режим движения, в котором электромотор/генератор MG выводит крутящий момент приведения в движение, и режим движения с генерированием с использованием двигателя, в котором электромотор/генератор MG выводит крутящий момент генерирования мощности, в качестве гибридных режимов (режима движения как гибридного транспортного средства), в которых двигатель Eng и электромотор/генератор MG представляют собой источники приведения в движение, содержащее:
- средство задания предела частоты вращения (модуль 411 задания предела частоты вращения), которое задает значение, которое превышает верхний предел частоты вращения, при котором электромотор/генератор MG может выполнять вывод крутящего момента, в качестве предела La частоты вращения для частоты Nem вращения узла "двигатель-электромотор", и
- средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) для уменьшения предела La частоты вращения до частоты вращения (предела частоты вращения Lb), при которой электромотор/генератор MG может выполнять вывод крутящего момента, когда частота Nem вращения узла "двигатель-электромотор" достигает предела La частоты вращения, и когда возникает запрос на вывод крутящего момента электромотора/генератора MG, в ходе вспомогательного режима движения.
(Фиг. 3 и фиг. 4).
Соответственно, запрос на вспомогательный режим или запрос на генерирование мощности может удовлетворяться при отражении запроса на движение с высокой нагрузкой водителя.
[0139] (2) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) уменьшает предел La частоты вращения в большей степени по мере того, как увеличивается требование по накоплению энергии относительно SOC аккумулятора (фиг. 4).
Соответственно, помимо преимущества (1), требование по накоплению электричества может надежно удовлетворяться посредством уменьшения до предела Lb частоты вращения, соответствующего требованию по накоплению энергии.
[0140] (3) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) определяет требование по накоплению энергии как более высокое по мере того, как возрастает потребление мощности вспомогательного оборудования, которая потребляется посредством множества видов вспомогательного оборудования, предоставленного для транспортного средства (фиг. 4). Соответственно, помимо преимуществ (1)-(2), посредством определения предела Lb частоты вращения как уменьшающегося в соответствии с абсолютной величиной потребления мощности вспомогательного оборудования, уменьшение SOC аккумулятора может предотвращаться без уменьшения предела частоты вращения больше, чем требуется.
[0141] (4) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) определяет требование по накоплению энергии как более высокое по мере того, как уменьшается зарядная емкость аккумулятора (SOC аккумулятора) (фиг. 4).
Соответственно, помимо преимуществ (1)-(3), возможно недопущение уменьшения SOC аккумулятора до значения, меньшего порогового значения A. Помимо этого, SOC аккумулятора может увеличиваться, и становится просто выбирать EV-режим движения, обеспечивая возможность повышения эффективности использования топлива.
[0142] (5) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) определяет время выполнения для уменьшения предела La частоты вращения, в соответствии с требованием по накоплению энергии относительно SOC аккумулятора (фиг. 4).
Соответственно, помимо преимуществ (1)-(4), можно уменьшать вероятность того, что водитель замечает, что предел La частоты вращения уменьшен.
[0143] (6) Требование по накоплению энергии представляет собой, по меньшей мере, зарядную емкость аккумулятора (SOC аккумулятора равно или меньше порогового значения A) (фиг. 4).
Соответственно, помимо преимуществ (1)-(5), можно еще более уменьшать вероятность того, что водитель замечает, что предел La частоты вращения уменьшен.
[0144] (7) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) задерживает время выполнения в большей степени, когда намерение ускорения водителя является сильным (спортивный режим движения и т.д.), по сравнению с тем, когда намерение ускорения водителя является слабым (нормальный режим движения и т.д.) (фиг. 3).
Соответственно, помимо преимуществ (1)-(4), а также (5) или (6), критическое движение становится возможным без вызывания неудовлетворенности у водителя.
[0145] (8) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) восстанавливает уменьшенный предел Lb частоты вращения до предела La частоты вращения, который задается посредством средства задания предела частоты вращения (модуля 411 задания предела частоты вращения), когда удовлетворяется условие отклонения, при котором частота Nem вращения узла "двигатель-электромотор" отклоняется от уменьшенного предела Lb частоты вращения (фиг. 4).
Соответственно, помимо преимуществ (1)-(7), можно уменьшать вероятность того, что водитель замечает, что предел частоты вращения восстановлен.
[0146] (9) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) задает то, когда частота Nem вращения узла "двигатель-электромотор" уменьшается до равной или меньшей предварительно определенного значения (порогового значения C), в качестве условия отклонения (фиг. 4).
Соответственно, помимо преимуществ (1)-(8), можно еще более уменьшать вероятность того, что водитель замечает, что предел частоты вращения восстановлен.
[0147] (10) Средство управления пределом частоты вращения (модуль 413 управления пределом частоты вращения) восстанавливает уменьшенный предел Lb частоты вращения до предела La частоты вращения, который задается посредством средства задания предела частоты вращения (модуля 411 задания предела частоты вращения), когда намерение ускорения водителя является сильным (спортивный режим движения и т.д.) (фиг. 3).
Соответственно, помимо преимуществ (1)-(9), можно уменьшать вероятность того, что водитель замечает, что предел частоты вращения восстановлен, и отражать потребности водителя при восстановлении предела частоты вращения.
[0148] Устройство управления гибридного транспортного средства настоящего изобретения описано выше на основе первого варианта осуществления, но его конкретные конфигурации не ограничены этим первым вариантом осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
[0149] В первом варианте осуществления, автоматическая трансмиссия AT представлена в качестве трансмиссии. Тем не менее, конфигурация не ограничена конфигурацией, проиллюстрированной в первом варианте осуществления. Например, автоматическая трансмиссия AT может представлять собой MT-трансмиссию, бесступенчатую трансмиссию CVT и т.п.
[0150] В первом варианте осуществления, показан пример, в котором устройство управления настоящего изобретения применяется к гибридному транспортному средству FR-типа. Тем не менее, конфигурация не ограничена конфигурацией, проиллюстрированной в первом варианте осуществления. Например, устройство управления настоящего изобретения также может применяться к гибридному транспортному средству FF-типа и т.д. Вкратце, устройство может применяться к любому устройству управления транспортного средства, имеющего двигатель Eng и электромотор/генератор MG в качестве источников приведения в движение.
[0151] В первом варианте осуществления, показан пример, в котором намерение ускорения водителя определяется из переключения нормального режима движения и спортивного режима движения. Тем не менее, конфигурация не ограничена конфигурацией, проиллюстрированной в первом варианте осуществления. Например, намерение ускорения водителя может определяться из одного или более фрагментов информации из числа величины APO открытия позиции педали акселератора, скорости нажатия педали акселератора, продольного ускорения, угла поворота при рулении, скорости VSP транспортного средства и т.п. В частности, переключение выполняется из предварительно определенной карты и т.п. при мониторинге степени и частоты изменения величины APO открытия позиции педали акселератора.
Перекрестная ссылка на родственные заявки
[0152] Данная заявка испрашивает приоритет на основе заявки на патент (Япония) № 2013-199649, поданной в Патентное бюро Японии 26 сентября 2013 года, и ее раскрытие сущности полностью содержится в настоящем описании изобретения по ссылке.
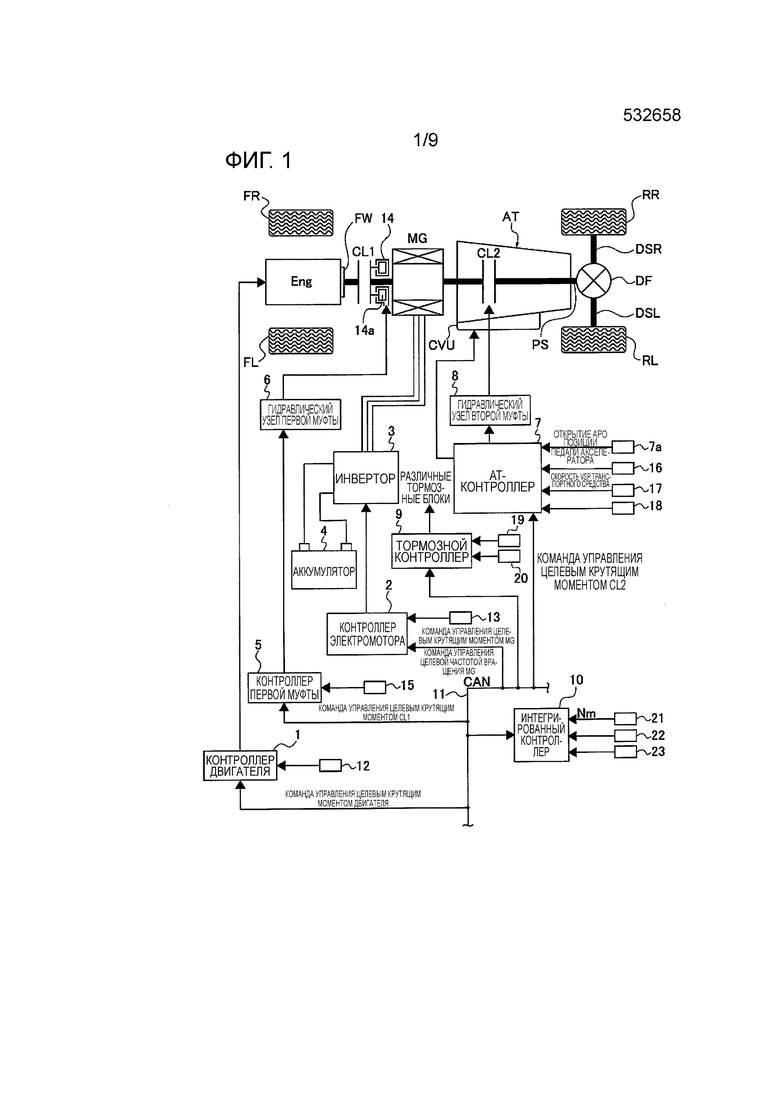
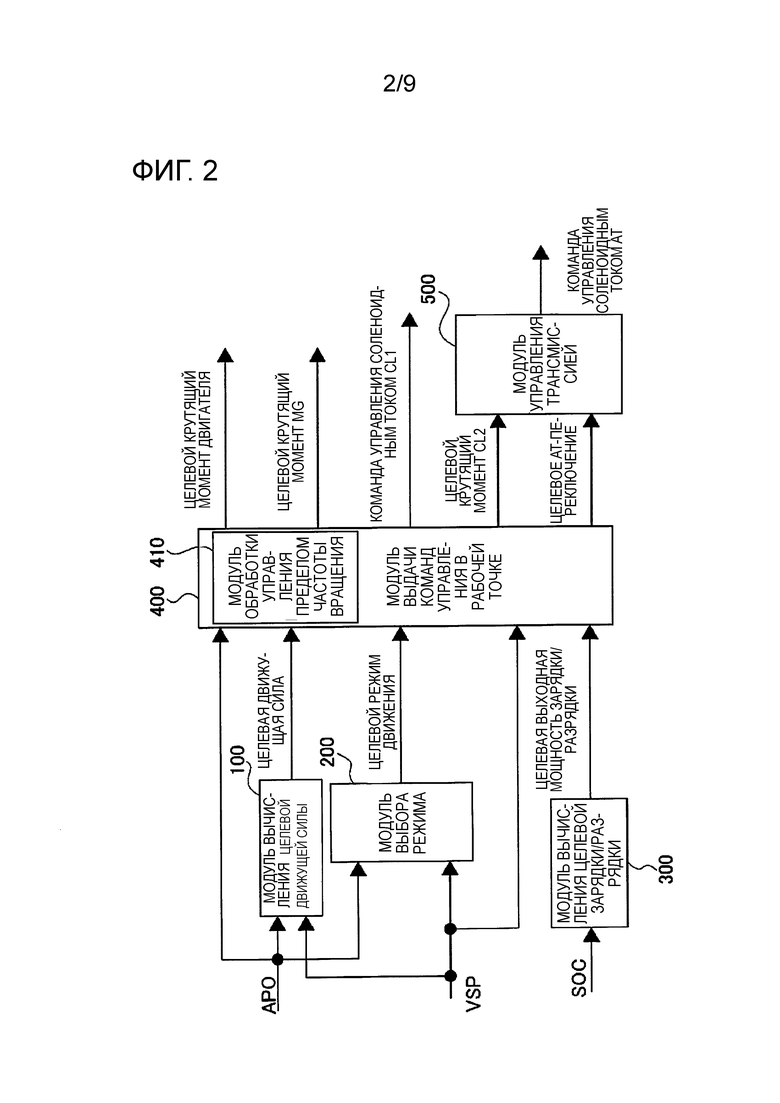
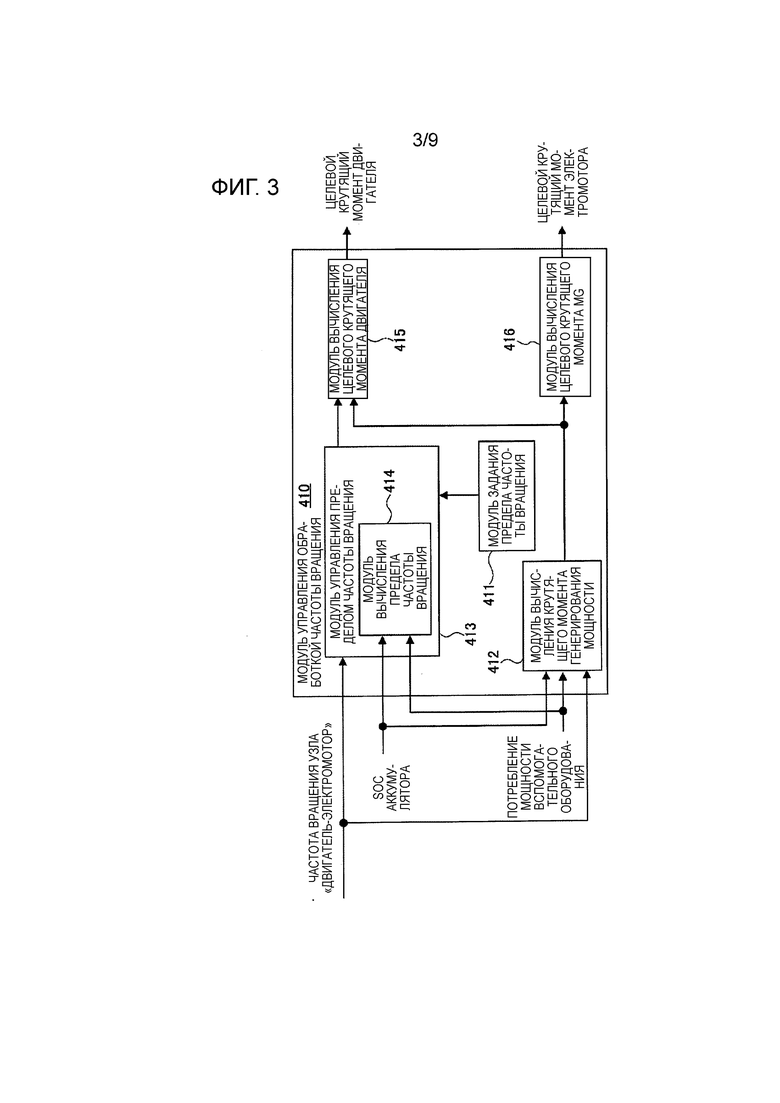
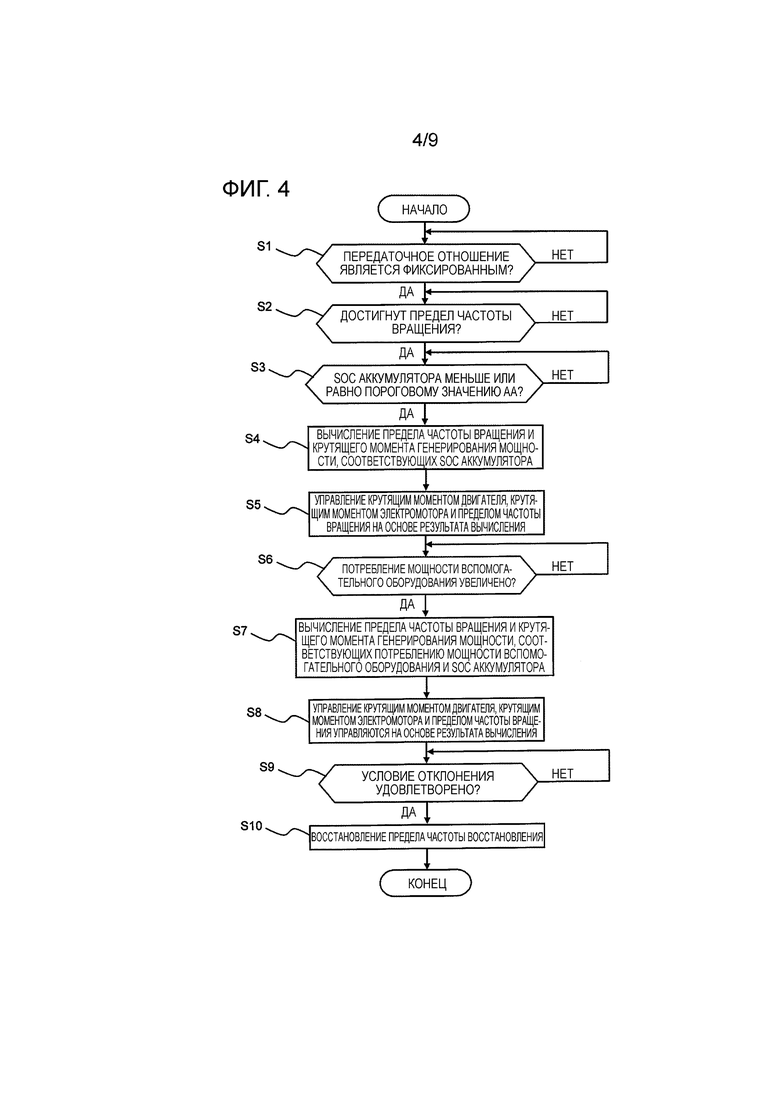
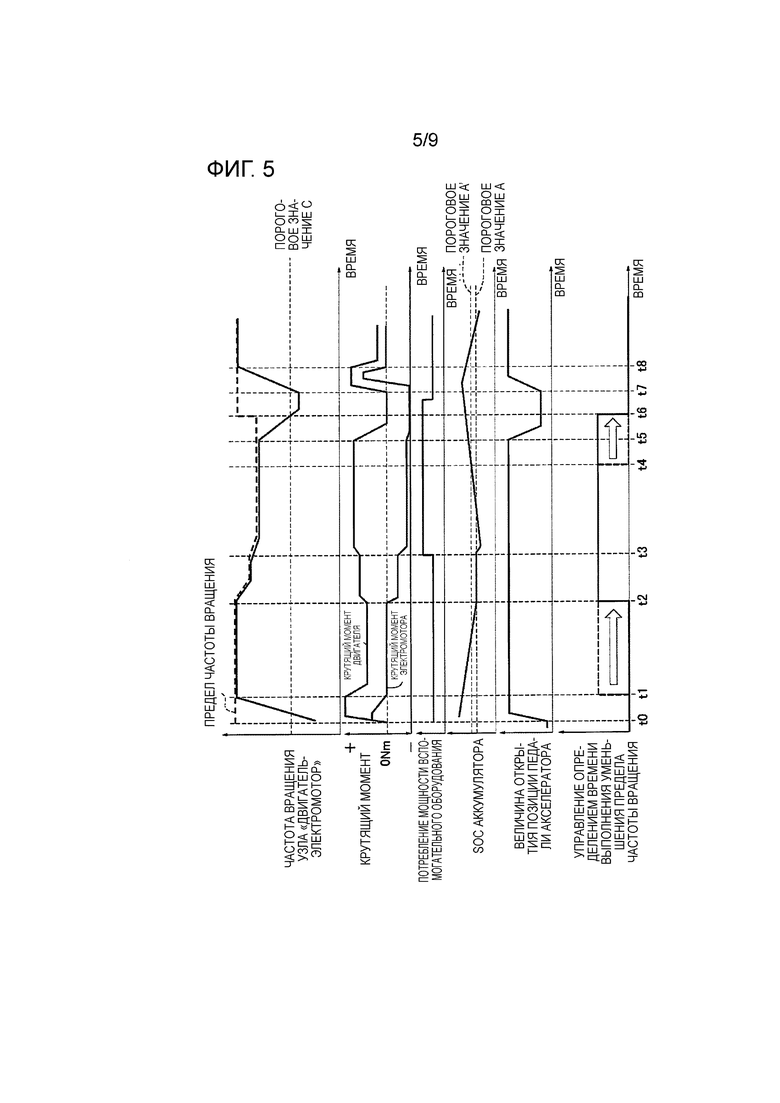
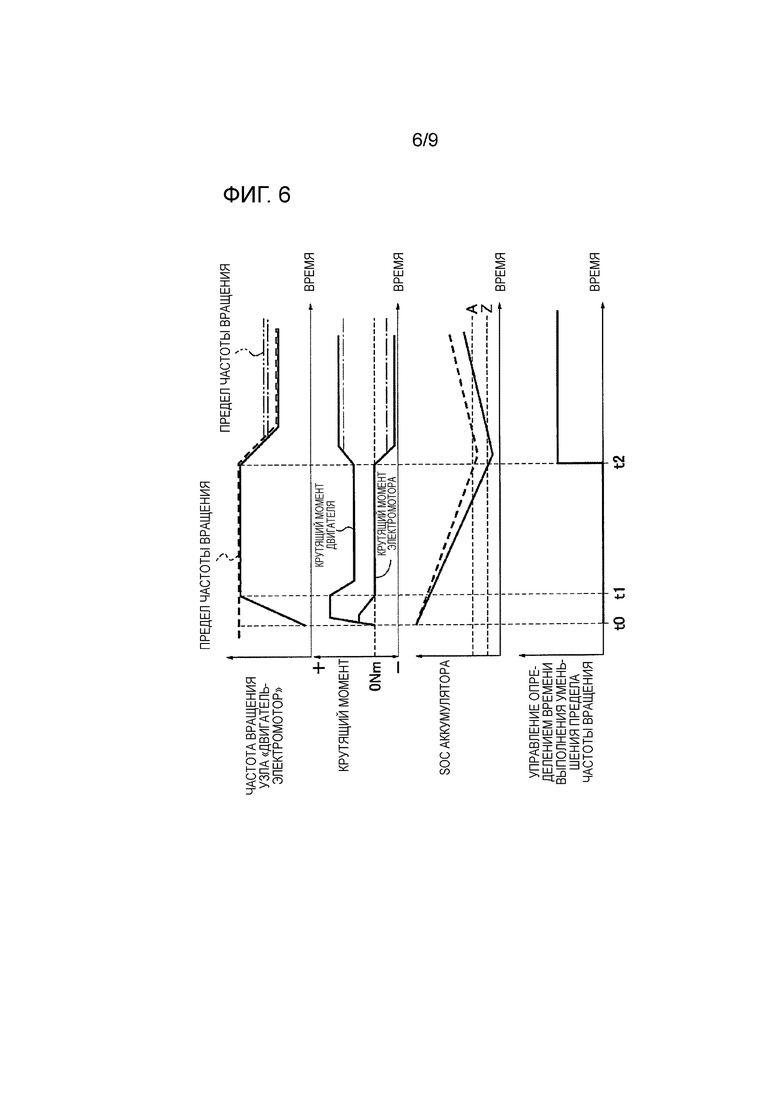
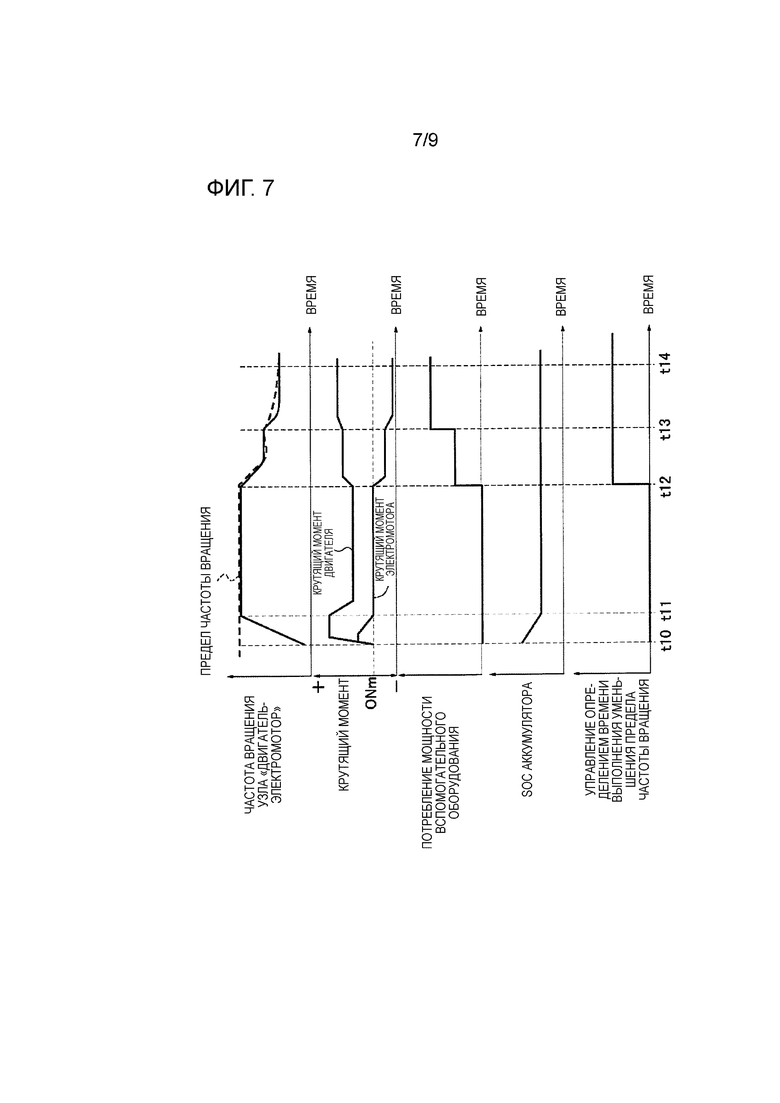
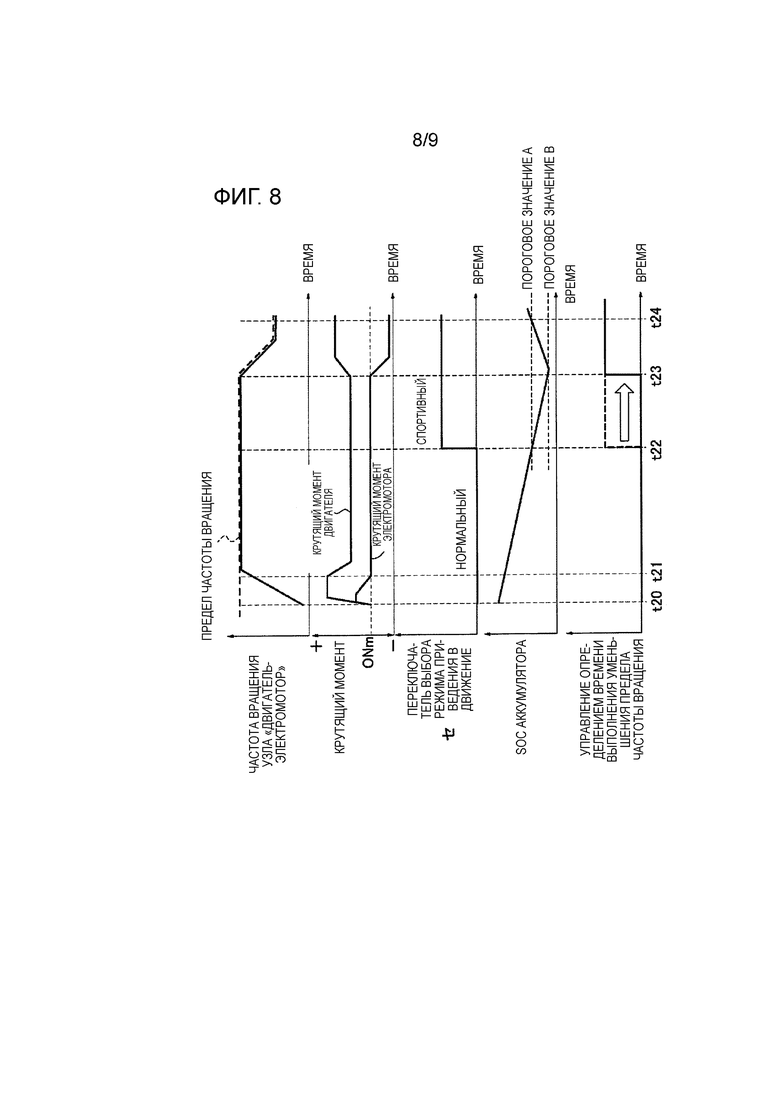
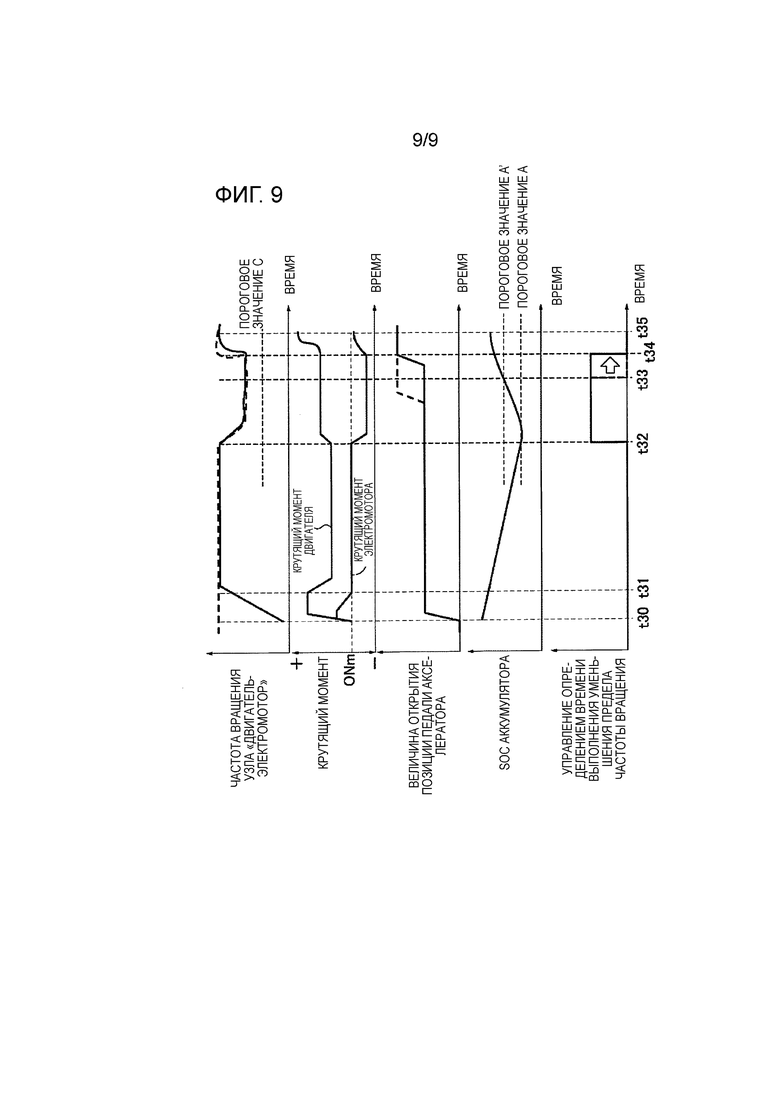
Изобретение относится к гибридным транспортным средствам. Устройство управления силовой установкой гибридного транспортного средства содержит контроллер, выборочно задающий вспомогательный режим движения, в котором электромотор-генератор выводит крутящий момент приведения в движение, и режим движения с генерированием с использованием двигателя, в котором электромотор-генератор выводит крутящий момент генерирования мощности, в качестве гибридных режимов, в которых двигатель и электромотор-генератор представляют собой источники приведения в движение. Контроллер включает в себя модуль задания предела частоты вращения узла «двигатель-электромотор» и модуль управления пределом частоты вращения, уменьшающий предел частоты вращения до упомянутой верхней частоты вращения. Улучшается работа силовой установки. 15 з.п. ф-лы, 9 ил.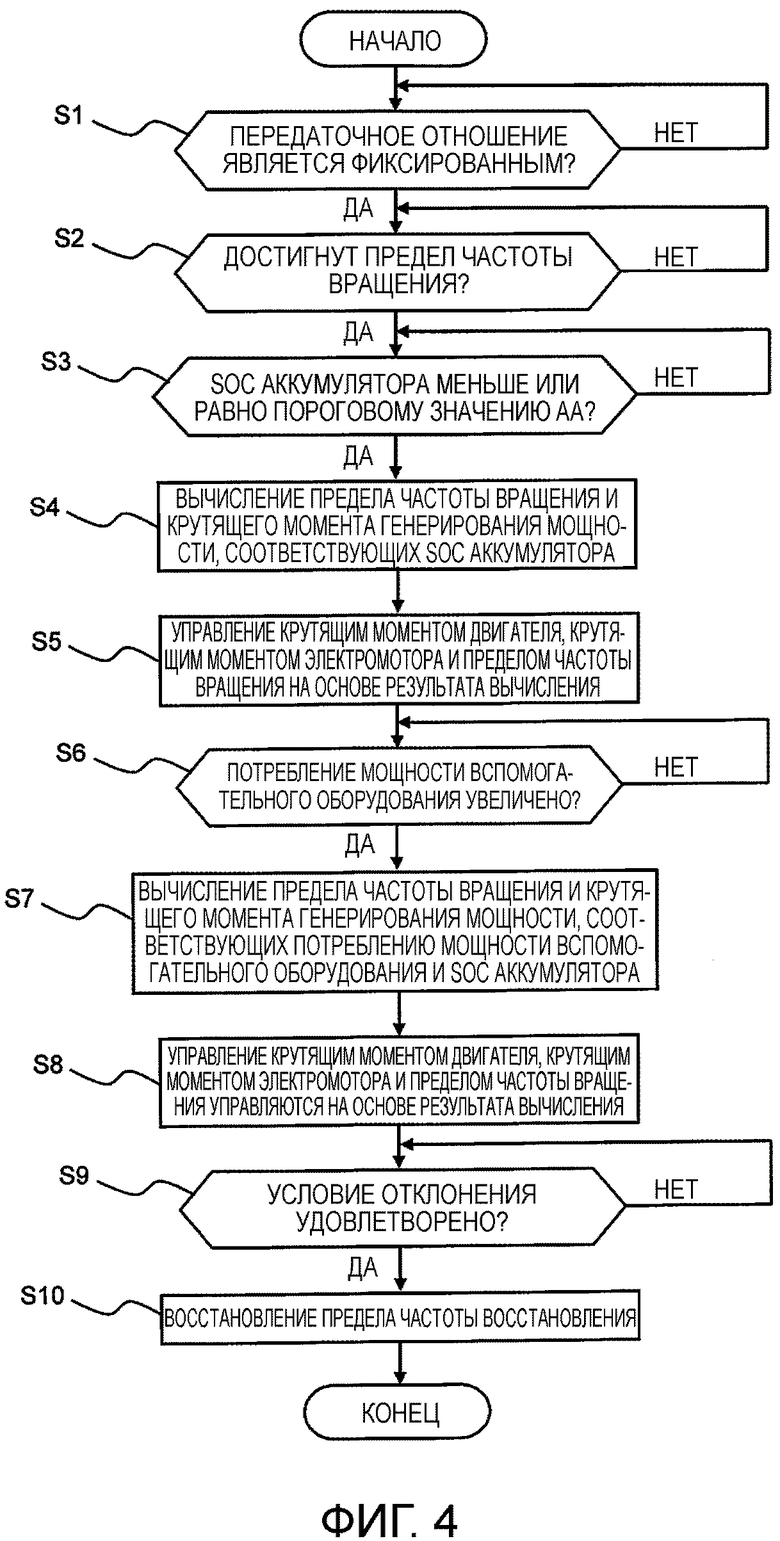
1. Устройство управления силовой установкой гибридного транспортного средства, причем гибридное транспортное средство содержит:
- двигатель;
- электромотор-генератор, с которым соединяется аккумулятор, который выполняет зарядку/разрядку;
- трансмиссию, в которой передаточное отношение может быть фиксированным посредством ввода водителя;
- ведущее колесо,
причем устройство управления содержит:
- контроллер, запрограммированный с возможностью выборочно задавать вспомогательный режим движения, в котором электромотор-генератор выводит крутящий момент приведения в движение, и режим движения с генерированием с использованием двигателя, в котором электромотор-генератор выводит крутящий момент генерирования мощности, в качестве гибридных режимов, в которых двигатель и электромотор-генератор представляют собой источники приведения в движение,
причем контроллер запрограммирован с возможностью включать в себя:
- модуль задания предела частоты вращения, запрограммированный с возможностью задавать значение, которое превышает верхний предел частоты вращения, при котором электромотор-генератор может выполнять вывод крутящего момента, в качестве предела частоты вращения для частоты вращения узла "двигатель-электромотор" и
- модуль управления пределом частоты вращения, запрограммированный с возможностью уменьшения предела частоты вращения до упомянутой верхней частоты вращения, при которой электромотор-генератор может выполнять вывод крутящего момента, когда частота вращения узла "двигатель-электромотор" достигает предела частоты вращения, и возникает запрос на вывод крутящего момента электромотора-генератора, в ходе вспомогательного режима движения в состоянии, в котором передаточное отношение является фиксированным посредством ввода водителя.
2. Устройство управления силовой установкой гибридного транспортного средства по п. 1, в котором:
- средство управления пределом частоты вращения уменьшает предел частоты вращения в большей степени по мере того, как увеличивается требование по накоплению энергии относительно аккумулятора.
3. Устройство управления силовой установкой гибридного транспортного средства по п. 2, в котором:
- средство управления пределом частоты вращения определяет требование по накоплению энергии как более высокое по мере того, как возрастает потребление мощности вспомогательного оборудования, которая потребляется посредством множества видов вспомогательного оборудования, предоставленного для транспортного средства.
4. Устройство управления силовой установкой гибридного транспортного средства по п. 2, в котором:
- средство управления пределом частоты вращения определяет требование по накоплению энергии как более высокое по мере того, как уменьшается зарядная емкость аккумулятора.
5. Устройство управления силовой установкой гибридного транспортного средства по п. 3, в котором:
- средство управления пределом частоты вращения определяет требование по накоплению энергии как более высокое по мере того, как уменьшается зарядная емкость аккумулятора.
6. Устройство управления силовой установкой гибридного транспортного средства по любому из пп. 1-5, в котором:
- средство управления пределом частоты вращения определяет время выполнения для уменьшения предела частоты вращения в соответствии с требованием по накоплению энергии относительно аккумулятора.
7. Устройство управления силовой установкой гибридного транспортного средства по п. 6, в котором:
- требование по накоплению энергии представляет собой, по меньшей мере, зарядную емкость аккумулятора.
8. Устройство управления силовой установкой гибридного транспортного средства по п. 6, в котором:
- средство управления пределом частоты вращения задерживает время выполнения в большей степени, когда намерение ускорения водителя является сильным, по сравнению с тем, когда намерение ускорения водителя является слабым.
9. Устройство управления силовой установкой гибридного транспортного средства по п. 7, в котором:
- средство управления пределом частоты вращения задерживает время выполнения в большей степени, когда намерение ускорения водителя является сильным, по сравнению с тем, когда намерение ускорения водителя является слабым.
10. Устройство управления силовой установкой гибридного транспортного средства по любому из пп. 1-5, 7-9, в котором:
- средство управления пределом частоты вращения восстанавливает уменьшенный предел частоты вращения до предела частоты вращения, который задается посредством средства задания предела частоты вращения, когда удовлетворяется условие отклонения, при котором частота вращения узла "двигатель-электромотор" отклоняется от уменьшенного предела частоты вращения.
11. Устройство управления силовой установкой гибридного транспортного средства по п. 6, в котором:
- средство управления пределом частоты вращения восстанавливает уменьшенный предел частоты вращения до предела частоты вращения, который задается посредством средства задания предела частоты вращения, когда удовлетворяется условие отклонения, при котором частота вращения узла "двигатель-электромотор" отклоняется от уменьшенного предела частоты вращения.
12. Устройство управления силовой установкой гибридного транспортного средства по п. 10, в котором:
- средство управления пределом частоты вращения задает то, когда частота вращения узла "двигатель-электромотор" уменьшается до равной или меньшей предварительно определенного значения, в качестве условия отклонения.
13. Устройство управления силовой установкой гибридного транспортного средства по п. 11, в котором:
- средство управления пределом частоты вращения задает то, когда частота вращения узла "двигатель-электромотор" уменьшается до равной или меньшей предварительно определенного значения, в качестве условия отклонения.
14. Устройство управления силовой установкой гибридного транспортного средства по любому из пп. 1-5, 7-9, 11-13, в котором:
- средство управления пределом частоты вращения восстанавливает уменьшенный предел частоты вращения до предела частоты вращения, который задается посредством средства задания предела частоты вращения, когда намерение ускорения водителя является сильным.
15. Устройство управления силовой установкой гибридного транспортного средства по п. 6, в котором:
- средство управления пределом частоты вращения восстанавливает уменьшенный предел частоты вращения до предела частоты вращения, который задается посредством средства задания предела частоты вращения, когда намерение ускорения водителя является сильным.
16. Устройство управления силовой установкой гибридного транспортного средства по п. 10, в котором:
- средство управления пределом частоты вращения восстанавливает уменьшенный предел частоты вращения до предела частоты вращения, который задается посредством средства задания предела частоты вращения, когда намерение ускорения водителя является сильным.
| WO 2013077161 A1, 30.05.2013 | |||
| WO 2012107957 A1, 16.08.2012 | |||
| JP 2010143383 A, 01.07.2010 | |||
| US 2005277501 A1, 15.12.2005 | |||
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |

