Предлагаемое изобретение относится к взрывателям боеприпасов, а более конкретно к неконтактным гидроакустическим взрывателям для корабельных и авиационных глубинных бомб, объектами поражения которых являются, преимущественно, подводные лодки.
Одним из основных параметров активного неконтактного гидроакустического устройства (взрывателя) для корабельных и авиационных глубинных бомб является его высокая устойчивость работы в условиях воздействия на него естественных и искусственных помех. Наличие естественных помех связано с состоянием и свойствами водной среды, а также движением противолодочного глубинного боеприпаса, снаряженного активным гидроакустическим взрывателем. При этом существенное влияние на вероятность ложных срабатываний гидроакустического взрывателя оказывают шумы обтекания корпуса боеприпаса на начальном участке его подводной траектории. Наличие шумов обтекания вызвано тем, что за счет большой скорости входа боеприпаса в воду он движется на начальном участке подводной траектории в кавитационном режиме или близком к нему. Такой режим характеризуется большим уровнем шумов обтекания. Проведенные измерения уровня шумов обтекания во время натурных испытаний показали, что их уровень, с учетом условий бомбометания, превышает пороговую чувствительность гидроакустического взрывателя в диапазоне глубин от 0 до 40 метров. К естественным помехам относятся также помехи, вызванные взрывами близкорасположенных боеприпасов при их серийном бомбометании. Известно, что шумы обтекания и помехи, вызванные взрывами близкорасположенных боеприпасов, имеют широкий частотный спектр и протяженный по времени характер (см. Клей К., Медвин Г. Акустическая океанография. - М.: Мир, 1980).
Из числа искусственных помех, защита от которых имеет актуальное значение, следует также отметить несинхронные и широкополосные помехи, создаваемые специальными постановщиками помех.
Наличие как естественных, так и искусственных помех повышает вероятность ложных срабатываний рабочего канала гидроакустического взрывателя, а это в свою очередь ужесточает требования к его помехоустойчивости.
Известен активный гидроакустический датчик цели для авиационной противолодочной ракеты (см. «Авиационная противолодочная ракета АПР-3Э». Техническое описание А 3.00.00.000-01 ТО. 2002 г., стр.26-27, 46-47). В состав датчика цели входят разнесенные по частоте неконтактные рабочий и защитный каналы. Наличие в датчике цели защитного канала обусловлено необходимостью исключения ложных срабатываний неконтактного рабочего канала из-за его низкой помехоустойчивости в условиях воздействия на него шумов обтекания и помех.
С целью недопущения ложных срабатываний защитный канал обеспечивает блокирование рабочего канала датчика цели на то время, когда уровень шумов обтекания равен или превышает установленное пороговое значение. Это приводит к тому, что на начальном участке подводной траектории неконтактный рабочий канал датчика цели практически не функционирует в рабочем режиме, что существенно снижает эффективность использования неконтактного датчика цели на подводной траектории для поражения подводных целей на малой глубине их погружения. Аналогичным образом защитный канал функционирует при воздействии на него помехи, вызванной взрывом близкорасположенного боеприпаса при серийном бомбометании или постановщиком помех. Поскольку рабочий и защитный каналы - это два разных разнесенных по частоте канала, то их настройка с учетом обеспечения стабильности параметров в течение всего срока эксплуатации и различных условий применения крайне сложна и требует значительных трудовых затрат. Обеспечить абсолютную идентичность работы защитного и рабочего каналов при наличии шумов обтекания и различного рода помех практически невозможно, поэтому у такого неконтактного взрывателя вероятность ложных срабатываний остается крайне высокой.
Целью данного изобретения является устранение указанного у прототипа недостатка, т.е. повышение помехоустойчивости неконтактного гидроакустического взрывателя до уровня, исключающего возможность его ложного срабатывания под действием на него как шумов обтекания, так и помех. В свою очередь это позволяет исключить необходимость блокирования работы взрывателя на подводной траектории движения боеприпаса, в том числе в условиях воздействия на вход приемника как шумов обтекания, так и естественной, и искусственной помех.
Указанный технический результат достигается за счет заявленного нового способа повышения помехоустойчивости активного гидроакустического взрывателя, работающего в режиме дальномера. В основе способа повышения помехоустойчивости взрывателя лежит новый принцип разделения поступивших на вход приемника сигналов как от цели, так и различной помехи на две группы во время их анализа и обработки. Принцип разделения на две группы базируется на том допущении, что сигналы, поступившие на вход приемника в течение начального временного интервала заданного периода излучения зондирующих импульсов, классифицируют при их анализе как сигналы от цели. Сигналы же, поступившие на вход приемника в течение конечного интервала заданного периода излучения зондирующих импульсов, классифицируют как сигналы различного рода помех, в том числе и шумы обтекания. Этот принцип практически позволяет в полной мере учитывать то обстоятельство, что как шумы обтекания, так и помехи, вызванные взрывами близкорасположенных боеприпасов, имеют широкий частотный спектр и протяженный по времени характер.
Предлагаемый способ повышения помехоустойчивости работы активного гидроакустического взрывателя для корабельных или авиационных глубинных бомб включает анализ и обработку сигналов, поступивших на вход приемника взрывателя в течение начального и конечного интервалов заданного периода излучения, при этом сигналы, поступившие на вход приемника взрывателя в течение начального интервала заданного периода излучения, классифицируют при анализе и обработке как сигналы, отраженные от цели, а сигналы, поступившие на вход приемника взрывателя в течение конечного интервала заданного периода излучения, классифицируют при анализе и обработке как сигналы помехи. Длительности заданного периода излучения зондирующих импульсов, а также его начального и конечного интервалов определяют из выражений:



где Тз - заданный период излучения зондирующих импульсов;
Тн - начальный интервал заданного периода излучения зондирующих импульсов;
Тк - конечный интервал заданного периода излучения зондирующих импульсов;
R - максимальная дальность обнаружения цели взрывателем;
С - скорость звука в воде.
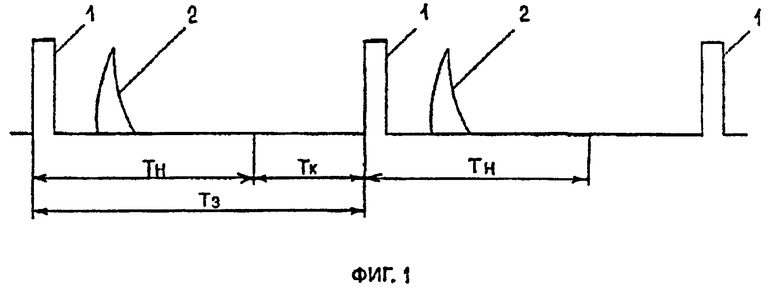
На фиг.1 представлены эпюры, поясняющие работу взрывателя при наличии на входе приемника эхо-сигналов от цели и отсутствии сигналов помехи.
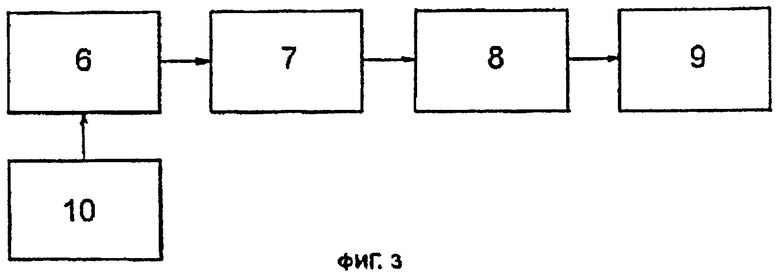
На фиг.2 представлены эпюры, поясняющие работу взрывателя при наличии на входе приемника как эхо-сигналов от цели, так и сигналов помехи.
На фиг.3 приведена блок-схема одного из возможных вариантов выполнения неконтактного взрывателя, реализующего предлагаемый способ повышения его помехоустойчивости. На представленных фигурах 1, 2 и 3 показаны и обозначены:
1 - зондирующие импульсы передатчика 10 с заданным периодом Тз излучения через гидрофон 6;
2 - эхо-сигналы от цели на входе приемника 7, поступившие в течение начального интервала времени Тн;
3 - сигнал помехи на входе приемника 7, поступивший в течение начального интервала времени Тн;
4 - сигнал помехи на входе приемника 7, поступивший в течение конечного интервала времени Тк;
5 - помеховый сигнал, поступивший на вход приемника 7 частично в течение начального интервала времени Тн, а оставшейся своей частью в течение конечного интервала времени Тк;
6 - гидрофон;
7 - приемник;
8 - блок анализа и обработки сигналов, поступивших с выхода приемника 7;
9 - исполнительный каскад;
10 - передатчик.
Предложенный вариант активного гидроакустического взрывателя с использованием заявленного способа работает следующим образом.
Вначале рассмотрим его работу при отсутствии на входе приемника 7 сигнала, вызванного шумами обтекания и помехами, как естественного, так и искусственного происхождения. В этом случае передатчик 10 будет излучать через гидрофон 6 зондирующие импульсы 1 с заданным периодом Тз. При наличии цели на расстоянии от взрывателя, равном или менее его дальности обнаружения цели R, на вход приемника 7 будут поступать эхо-сигналы 2 (см. фиг.1), равные или более некоторого установленного значения. При этом поступившие эхо-сигналы 2 в течение начального интервала Тн независимо от их числа будут записаны в память блока анализа и обработки 8, например, в виде условной единицы. Если выбрать значения Тз, Тн и Тк в полном соответствии с выражениями (1), (2) и (3) формулы изобретения, то в течение конечного интервала Тк эхо-сигналы от цели 2 на вход приемника 7 поступать не будут и как результат записанная в память условная единица будет сохранена. После того, как в память будет последовательно записано некоторое количество единиц, соответствующих определенному количеству излученных зондирующих импульсов, а также поступивших на вход приемника 7 эхо-сигналов 2, с выхода блока анализа и обработки сигналов 8 поступит сигнал на исполнительный каскад 9, т.е. произойдет подрыв боевой части.
Далее рассмотрим работу неконтактного взрывателя в случае, когда на входе приемника 7 присутствуют эхо-сигналы 2 и сигналы помехи 3, 4 и 5 (см фиг.2), вызванные шумами обтекания, а также взрывами близкорасположенных боеприпасов или постановщиками помех. Учитывая то, что шумы обтекания и помехи 3, 4 и 5 имеют широкий частотный спектр и протяженный по времени характер, они будут присутствовать на входе приемника 7 внутри каждого периода Тз излучения зондирующих импульсов и одновременно охватывать как начальный Тн, так и конечный Тк его интервалы.
Если при этом сигналы помехи 3, 4 и 5 (см. фиг.2) на входе приемника 7 будут равны или превысят некоторое установленное пороговое значение, то независимо от наличия или отсутствия на входе приемника 7 одновременно с ними эхо-сигналов 2 в блоке анализа и обработки сигналов 8 в течение каждого заданного периода Тз излучения зондирующих импульсов будет записана в память в течение Тн условная единица, а затем в течение Тк эта условная единица будет стерта. В результате, накопление импульсов в памяти блока анализа и обработки сигналов 8 происходить не будет, а это безусловно исключает возможность ложного срабатывания неконтактного взрывателя в условиях воздействия на него шумов обтекания и помехи. Таким образом, предлагаемый способ позволяет существенно повысить помехоустойчивость неконтактного гидроакустического взрывателя. Кроме этого, новый способ существенно упрощает схему неконтактного взрывателя за счет исключения дополнительного защитного канала и связанную с ним трудоемкую настройку в процессе изготовления, а также исключает необходимость блокирования рабочего канала взрывателя на подводной траектории его движения.
Помимо этого, данный способ повышения помехоустойчивости обладает в части применения его некоторой универсальностью по отношению к другим активным гидроакустическим устройствам, для которых повышение помехоустойчивости в условиях воздействия шумов обтекания и различного рода помех является актуальным. Описанный вариант неконтактного гидролокационного взрывателя следует трактовать как один из возможных его вариантов применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ РАБОТЫ АКТИВНОГО ГИДРОАКУСТИЧЕСКОГО ДАТЧИКА ЦЕЛИ | 2015 |
|
RU2588507C1 |
| ДОННОЕ МОРСКОЕ СТОРОЖЕВОЕ УСТРОЙСТВО | 2006 |
|
RU2317514C1 |
| СПОСОБ НЕКОНТАКТНОГО ПОДРЫВА ЗАРЯДА | 2010 |
|
RU2484424C2 |
| СПОСОБ НЕКОНТАКТНОГО ПОДРЫВА ЗАРЯДА | 2010 |
|
RU2442956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ БОЕПРИПАСА С ЦЕЛЬЮ | 2011 |
|
RU2477833C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ЦЕЛИ | 2011 |
|
RU2477869C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ИНИЦИАТОРА ГАЗОДИНАМИЧЕСКОГО ИМПУЛЬСНОГО УСТРОЙСТВА | 2015 |
|
RU2591293C1 |
| ВЗРЫВАТЕЛЬ | 2007 |
|
RU2362969C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ ДВУХ ТЕЛ, ДВИЖУЩИХСЯ С РАЗЛИЧНОЙ СКОРОСТЬЮ | 2011 |
|
RU2477870C2 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2004 |
|
RU2292529C2 |
Изобретение относится к взрывателям боеприпасов. Технический результат - повышение помехоустойчивости взрывателя. В основе способа лежит принцип разделения поступивших на вход приемника сигналов как от цели, так и различного происхождения помех на две группы во время их анализа и обработки. Сигналы, поступившие на вход приемника в течение начального временного интервала заданного периода излучения зондирующих импульсов, классифицируются при их анализе как сигналы от цели. Сигналы же, поступившие на вход приемника в течение конечного интервала заданного периода излучения зондирующих импульсов, классифицируются как сигналы различного рода помех, включая и шумы обтекания. Длительности заданного периода излучения зондирующих импульсов, а также его начального и конечного интервалов определяются из математических выражений. 3 ил.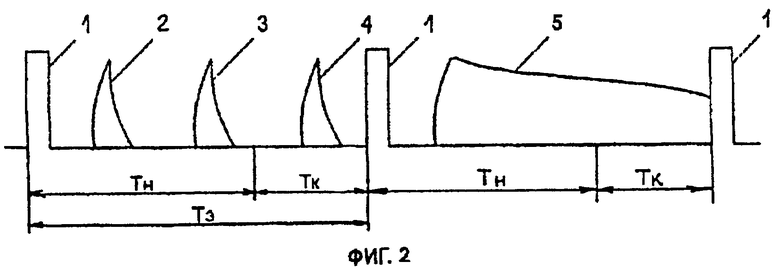
Способ повышения помехоустойчивости работы активного гидроакустического взрывателя корабельных или авиационных глубинных бомб, включающий анализ и обработку сигналов, поступивших на вход приемника взрывателя в течение начального и конечного интервалов заданного периода излучения зондирующих импульсов, при этом сигналы, поступившие на вход приемника взрывателя в течение начального интервала заданного периода излучения, классифицируют при анализе и обработке как сигналы, отраженные от цели, а сигналы, поступившие на вход приемника взрывателя в течение конечного интервала заданного периода излучения, классифицируют при анализе и обработке как сигналы помехи, причем заданный период излучения зондирующих импульсов, а также длительности его начального и конечного интервалов определяют из выражений:

где Тз - заданный период излучения зондирующих импульсов;
Тн - начальный интервал заданного периода излучения зондирующих импульсов;
Тк - конечный интервал заданного периода излучения зондирующих импульсов;
R - максимальная дальность обнаружения цели взрывателем;
С - скорость звука в воде.
| DE 2939700 A1, 16.04.1981 | |||
| ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ, ОБЛАДАЮЩАЯ АНТИКОАГУЛЯЦИОННЫМ И АНТИАГРЕГАЦИОННЫМ ДЕЙСТВИЕМ, И СПОСОБ ЕЕ ПОЛУЧЕНИЯ | 2006 |
|
RU2326677C1 |
| СИСТЕМА МОНИТОРИНГА ДАВЛЕНИЯ ВОЗДУХА В ШИНАХ И СПОСОБ ОПОВЕЩЕНИЯ О ДАВЛЕНИИ ВОЗДУХА В ШИНАХ | 2010 |
|
RU2495762C1 |
| DE 1915675 C1, 24.09.1992 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ СООБЩЕНИЯ ПО ОБЩЕМУ КАНАЛУ УПРАВЛЕНИЯ ДЛЯ ПРОИЗВОЛЬНОГО ДОСТУПА В СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2505947C2 |

