Предлагаемое изобретение относится к активным гидроакустическим датчикам цели для боеприпасов, устанавливаемых на грунте в мелководном районе моря и предназначенных для поражения десантно-высадочных средств противника.
Известен активный гидроакустический датчик цели для авиационной противолодочной ракеты (см. «Авиационная противолодочная ракета АПР-ЗЭ». Техническое описание А 3.00.00.000-01 ТО. 2002 г., стр. 26-27, 46-47). В состав датчика цели входят разнесенные по частоте неконтактные рабочий и защитный каналы. Наличие в датчике цели защитного канала обусловлено необходимостью исключения ложных срабатываний неконтактного рабочего канала из-за его низкой помехоустойчивости в условиях воздействия на него шумов обтекания и помех.
С целью недопущения ложных срабатываний защитный канал обеспечивает блокирование рабочего канала датчика цели на то время, когда уровень шумов обтекания равен или превышает установленное пороговое значение. Это приводит к тому, что на начальном участке подводной траектории неконтактный рабочий канал датчика цели практически не функционирует в рабочем режиме, что существенно снижает эффективность использования неконтактного датчика цели на подводной траектории для поражения подводных целей на малой глубине их погружения. Аналогичным образом защитный канал функционирует при воздействии на него помехи, вызванной взрывом близкорасположенного боеприпаса при серийном бомбометании или постановщиком помех. Поскольку рабочий и защитный каналы - это два разных разнесенных по частоте канала, то их настройка с учетом обеспечения стабильности параметров в течение всего срока эксплуатации и различных условий применения крайне сложна и требует значительных трудовых затрат. Обеспечить абсолютную идентичность работы защитного и рабочего каналов при наличии шумов обтекания и различного рода помех практически невозможно, поэтому у такого датчика цели вероятность ложных срабатываний остается крайне высокой.
Также известен способ повышения помехоустойчивости работы активного гидроакустического взрывателя для корабельных или авиационных глубинных бомб (см. описание изобретения к патенту RU №2413175; кл. F42C 13/06; опубликован 27.02.2011 г.). Согласно этому способу, при проведении анализа и обработки сигналов, поступивших на вход приемника взрывателя в течение начального интервалов заданного периода излучения зондирующих импульсов, их квалифицируют как сигналы от цели, а сигналы, поступившие на вход приемника взрывателя в течение конечного интервалов заданного периода зондирующих импульсов, квалифицируют как сигналы помехи. При этом заданный период излучения зондирующих импульсов, а также длительности его начального и конечного интервалов определяют из выражений:

где ТЗ - заданный период излучения зондирующих импульсов;
ТН - начальный интервал заданного периода излучения зондирующих импульсов;
TК - конечный интервал заданного периода излучения зондирующих импульсов;
R - максимальная дальность обнаружения цели;
С - скорость звука в воде.
Недостатком как аналога, так и прототипа является то, что они не обладают достаточной помехоустойчивостью при использовании их в случаях, когда боеприпас, снабженный известным активным гидроакустическим датчиком цели, устанавливают на грунте в мелководном районе моря для возможного поражения десантно-высадочных средств противника. Для указанных выше условий использование известных гидроакустических датчиков цели не представляется возможным из-за их низкой помехоустойчивости, вызванной тем, что отраженные от поверхности воды сигналы имеют большой уровень и поступают на вход приемника в течение начального интервала заданного периода излучения зондирующих импульсов, т.е. когда они классифицируются как сигналы, отраженные от цели. В результате чего, отраженные от поверхности воды сигналы при отсутствии цели вызовут ложное срабатывание датчика цели.
Целью данного изобретения является устранение недостатка указанного у прототипа, т.е. повышение помехоустойчивости неконтактного гидроакустического датчика цели до уровня, исключающего возможность его ложного срабатывания под воздействием на него помехи в виде отраженных от поверхности воды сигналов.
Указанный технический результат достигается за счет заявленного нового способа повышения помехоустойчивости активного гидроакустического датчика цели боеприпаса, устанавливаемого на фунте в мелководном районе моря и предназначенного для возможного поражения десантно-высадочных средств противника.
Согласно заявленному способу, повышение помехоустойчивости работы активного гидроакустического датчика цели достигнуто тем, что в нем анализ и обработку сигналов, поступивших на вход приемника, производят в течение начального и конечного интервалов заданного периода излучения зондирующих импульсов, при этом на время прихода сигнала, отраженного от поверхности воды, приемник закрывают бланк-импульсом. Локальное срабатывание датчика цели осуществляют после накопления выбранного количества отраженных от цели импульсов в момент когда сигнал от цели исчезнет за счет вхождения цели в зону, определяемую шириной бланк-импульса, закрывающего приемник, или когда задержка сигнала от цели относительно длительности зондирующего импульса начнет увеличиваться, после прохождения целью кратчайшего расстояния от приемной антенны вне зоны, определяемой шириной бланк-импульса. При этом временные соотношения отдельных интервалов излучаемых и принимаемых сигналов в пределах заданного периода излучения зондирующего импульса, а также ширина бланк-импульса определяются из выражений:





где Тп - период излучения зондирующих импульсов;
Тн - начальный интервал периода излучения зондирующих импульсов;
Тк - конечный интервал периода излучения зондирующих импульсов;
Тбл - длительность бланк-импульса;
Тс - длительность времени приема и обработки сигнала от цели;
Н - глубина постановки датчика цели;
R - максимальная дальность обнаружения цели;
С - скорость звука в воде.
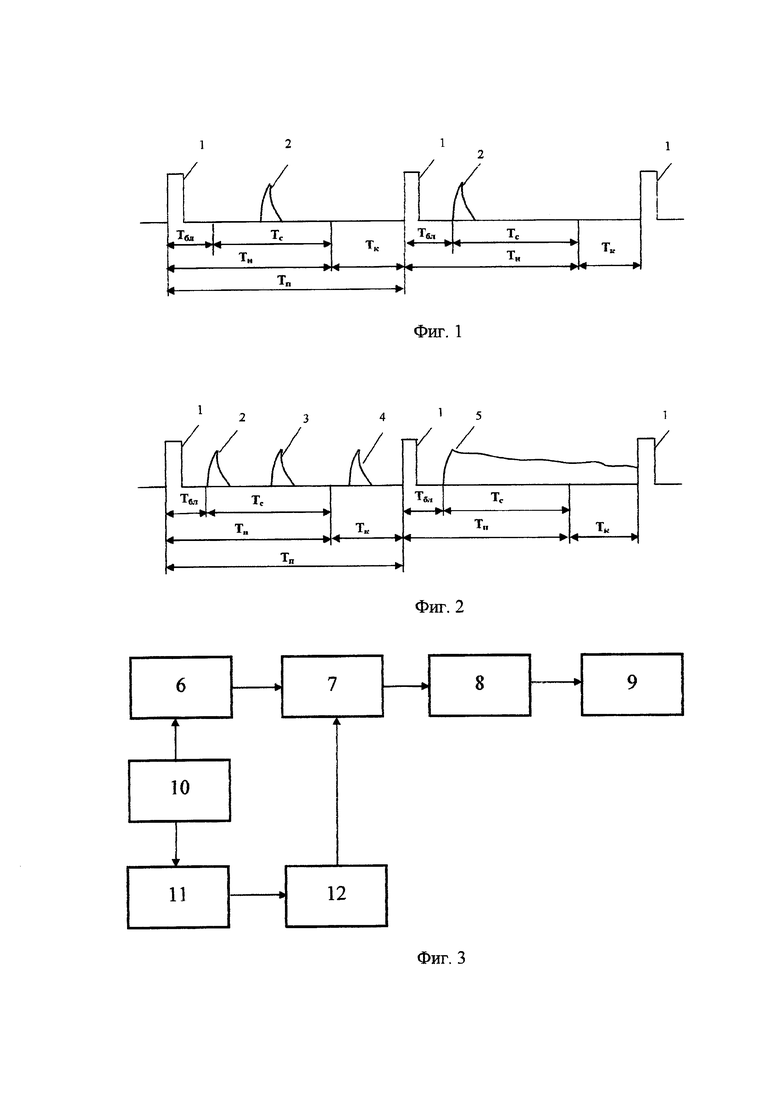
На фиг. 3 представлена блок-схема одного из возможных вариантов предлагаемого активного гидроакустического датчика цели, реализующего заявленный способ.
На фиг. 1 представлены эпюры, поясняющие работу датчика цели при наличии на входе приемника эхо-сигналов от цели и отсутствии сигналов помехи.
На фиг. 2 представлены эпюры, поясняющие работу взрывателя при наличии на входе приемника как эхо-сигналов от цели, так и помех.
На представленных фигурах 1, 2, 3 показаны и обозначены:
1 - зондирующие импульсы передатчика 10 с заданным периодом излучения через гидрофон 6 и гидрофон глубиномера 11;
2 - эхо-сигналы от цели на входе приемника 7, поступившие в течение начального интервала времени Тн;
3 - сигнал помехи на входе приемника 7, поступивший в течение начального интервала времени Тн;
4 - сигнал помехи на входе приемника 7, поступивший в течение конечного интервала времени Тк;
5 - сигнал помехи на входе приемника 7, поступивший частично в течение начального интервала времени Тн и оставшийся своей частью в течение конечного интервала времени Тк;
6 - гидрофон датчика цели;
7 - приемник;
8 - блок анализа и обработки сигналов, поступивших с выхода приемника 7;
9 - исполнительный каскад;
10 - передатчик;
11 - гидрофон глубиномера;
12 - устройство формирования бланк-импульса.
Описываемый вариант выполнения активного гидроакустического датчика цели содержит гидрофон 6, к выходу которого подключен один из входов приемника 7. Выход приемника 7 подключен к входу блока анализа и обработки сигналов 8, поступивших с выхода приемника 7. Выход блока анализа и обработки сигналов 8 подключен к входу исполнительного каскада 9. Передатчик 10 одним выходом подключен к входу гидрофона датчика цели 6, а другим выходом - к входу гидрофона глубиномера 11. Выход гидрофона глубиномера 11 подключен к входу устройства формирования банк-импульса 12, а выход последнего - к другому входу приемника 7.
Функционирование описываемого выше варианта гидроакустического датчика цели на фиг. 1 осуществляется следующим образом.
После постановки боеприпаса с вышеуказанным датчиком цели на грунт в мелководном районе моря и подачи питания на блок-схему датчика цели фиг. 3 передатчик 10 подает зондирующие импульсы на гидрофон глубиномера 11. Отраженные от поверхности воды импульсы поступают на вход гидрофона датчика цели 6, а затем с его выхода - на вход приемника 7, где в течении нескольких периодов определяется значение задержки принятого сигнала относительно излученного гидрофоном глубиномера 11. Полученная таким образом информация о глубине постановки датчика цели используется для определения соответствующей этой глубине длительности бланк-импульса, запирающего приемник, а также другие временные соотношения отдельных интервалов излучаемых и принимаемых сигналов в пределах заданного периода излучения зондирующего импульса из вышеуказанных уравнений (1), (2), (3), (4) и (5). После этого гидрофон глубиномера 11 отключается от передатчика 10, а зондирование и прием сигналов от цели происходит через гидрофон датчика цели 6. По приходу управляющего сигнала датчик цели переходит в активный режим и начинает лоцирование пространства с целью возможного приема сигналов от цели.
После приема и накопления заданного количества сигналов от цели начинается процесс определения момента срабатывания исполнительного каскада 9. Критериями, по которым определяется момент срабатывания исполнительного каскада 9, являются либо исчезновение сигнала от цели на выходе приемника 7 за счет вхождения цели в зону, определяемую шириной бланк-импульса, либо когда задержка сигнала от цели относительно зондирующего импульса начнет увеличиваться после прохождения целью кратчайшего расстояния до гидрофона датчика цели 6 вне зоны, определяемой шириной бланк-импульса. Таким образом, предлагаемый способ позволяет повысить помехозащищенность активного гидроакустического датчика цели как от взрывов близкорасположенных боеприпасов или постановщиков помех, так и от помех в виде отраженных от поверхности воды зондирующих импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ РАБОТЫ АКТИВНОГО ГИДРОАКУСТИЧЕСКОГО ВЗРЫВАТЕЛЯ | 2009 |
|
RU2413175C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ИНИЦИАТОРА ГАЗОДИНАМИЧЕСКОГО ИМПУЛЬСНОГО УСТРОЙСТВА | 2015 |
|
RU2591293C1 |
| СПОСОБ НЕКОНТАКТНОГО ПОДРЫВА ЗАРЯДА | 2010 |
|
RU2484424C2 |
| СПОСОБ НЕКОНТАКТНОГО ПОДРЫВА ЗАРЯДА | 2010 |
|
RU2442956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ ДВУХ ТЕЛ, ДВИЖУЩИХСЯ С РАЗЛИЧНОЙ СКОРОСТЬЮ | 2011 |
|
RU2477870C2 |
| Устройство для измерения скорости потока | 1988 |
|
SU1624257A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ЦЕЛИ | 2011 |
|
RU2477869C2 |
| СПОСОБ ГИДРОЛОКАЦИИ В МЕЛКОВОДНЫХ ОБЛАСТЯХ С ОПЕРАТИВНЫМ КОНТРОЛЕМ ИЗМЕНЧИВОСТИ УСЛОВИЙ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2017 |
|
RU2664869C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПОДВОДНОЙ СВЯЗИ | 2015 |
|
RU2597685C1 |
| Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала | 2023 |
|
RU2809350C1 |
Изобретение относится к неконтактным датчикам цели боеприпасов. В основе способа лежит принцип разделения поступивших на вход приемника сигналов как от цели, так и различного происхождения помех на три группы во время их блокирования, анализа и обработки. Сигналы, поступившие на вход приемника в течение начального временного интервала заданного периода излучения зондирующих импульсов, классифицируются в начале вышеуказанного временного интервала, определяемого шириной бланк-импульса, как отраженные от поверхности воды помеховые сигналы и блокируются. Сигналы, поступившие на вход приемника в течение остальной части вышеуказанного начального временного интервала при их анализе, классифицируются как сигналы от цели. Сигналы же, поступившие на вход приемника в течение конечного интервала заданного периода излучения зондирующих импульсов, классифицируются как сигналы различного рода помех. Длительности заданного периода излучения зондирующих импульсов, а также его начального и конечного интервалов и ширина бланк-импульса определяются из математических уравнений. Изобретение позволяет повысить помехоустойчивость датчика цели. 3 ил.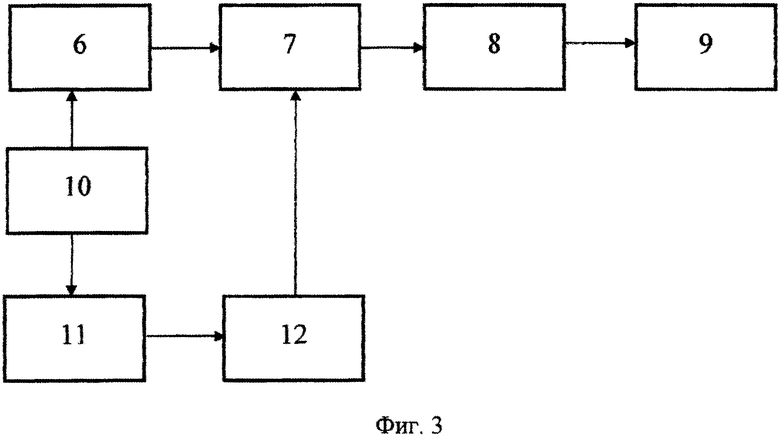
Способ повышения помехоустойчивости работы активного гидроакустического датчика цели для боеприпаса, устанавливаемого на грунте в мелководном районе моря для поражения десантно-высадочных средств противника, включающий в себя анализ и обработку сигналов, поступивших на вход приемника датчика цели в течение начального и конечного интервалов периода излучения зондирующих импульсов, при этом на время прихода сигнала, отраженного от поверхности воды, приемник закрывают бланк-импульсом, а локальное срабатывание датчика цели осуществляют после накопления выбранного количества отраженных от цели импульсов в момент, когда сигнал от цели исчезнет за счет вхождения цели в зону, определяемую шириной бланк-импульса, закрывающего приемник, или когда задержка сигнала от цели относительно длительности зондирующего импульса начнет увеличиваться, после прохождения целью кратчайшего расстояния от приемной антенны вне зоны, определяемой шириной бланк-импульса, причем временные соотношения отдельных интервалов излучаемых и принимаемых сигналов в пределах периода излучения зондирующего импульса, а также ширина бланк-импульса определяются из выражений:
Тп = Тбл + Тс + Тк;
Тн = Тбл + Тс ≥ 
Тбл = 
Тс = 

где Тп - период излучения зондирующих импульсов;
Тн - начальный интервал периода излучения зондирующих импульсов;
Тк - конечный интервал периода излучения зондирующих импульсов;
Тбл - длительность бланк-импульса;
Тс - длительность времени приема и обработки сигнала от цели;
Н - глубина постановки датчика цели;
R - максимальная дальность обнаружения цели датчиком;
C - скорость звука в воде.
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ РАБОТЫ АКТИВНОГО ГИДРОАКУСТИЧЕСКОГО ВЗРЫВАТЕЛЯ | 2009 |
|
RU2413175C1 |
| DE 2939700 A1, 16.04.1981 | |||
| ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ, ОБЛАДАЮЩАЯ АНТИКОАГУЛЯЦИОННЫМ И АНТИАГРЕГАЦИОННЫМ ДЕЙСТВИЕМ, И СПОСОБ ЕЕ ПОЛУЧЕНИЯ | 2006 |
|
RU2326677C1 |
| СИСТЕМА МОНИТОРИНГА ДАВЛЕНИЯ ВОЗДУХА В ШИНАХ И СПОСОБ ОПОВЕЩЕНИЯ О ДАВЛЕНИИ ВОЗДУХА В ШИНАХ | 2010 |
|
RU2495762C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ СООБЩЕНИЯ ПО ОБЩЕМУ КАНАЛУ УПРАВЛЕНИЯ ДЛЯ ПРОИЗВОЛЬНОГО ДОСТУПА В СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2505947C2 |

