Область техники
Настоящее изобретение в общем имеет отношение к созданию способов измерения положения оборудования в глубоких скважинах наземных и прибрежных морских установок. Более конкретно, настоящее изобретение имеет отношение к применению фонтанных задвижек (фонтанных штуцеров, вентилей управления потоком).
Уровень техники
Некоторые изготовители серийно выпускают волоконно-оптические датчики положения, основанные на интерферометрии или на силе света. Датчик положения фирмы Fiso попадает в указанную первую категорию, как указано в статье "Fiso's White-Light Pabry-Perot Fiber-Optics Sensors"; Fiso Technologies Inc. Датчик положения фирмы Philtec, описанный в статье "Philtec Fiber Optic Displacements Sensors", Philtec Inc., 2002, основан на измерении силы света. В качестве примеров других устройств, которые не дошли до стадии серийного производства, можно привести следующие: основанный на интерферометрии датчик, установленный на рычаге, описанный в статье F.Ruan, Y.Zhou, Y.Loy, S.Met, Ch.Liaw and J.Liu "Precision Fiber Optic Displacement Sensor Based on Reciprocal biterferometry"; Optics Communication, No.176, pp. 105-112, 2000, и датчик, основанный на применении отражающих призм, описанный в статье Y.Takamatsu. K.Tomota and T.Yamashita "Fiber-optic Position Sensor"; Sensors and Actuators", № A21-A23, pp. 435-437, 1990.
Измерительные преобразователи, основанные на интерферометрии, зависят от размера отверстия, через которое свет выходит из волокна и отражается некоторым типом зеркала. Это является недостатком, так как зеркало может быть смещено относительно волокна, что приводит к необходимости механического совмещения луча света, а также создает проблемы, связанные с чистотой оптических поверхностей (торца волокна и поверхности зеркала). Более того, в случае измерительных преобразователей, расположенных у конца волокна, невозможно последовательное мультиплексирование (уплотнение).
Высокая чувствительность к угловому смещению волоконно-оптической линии относительно поверхности является одним из недостатков измерительных преобразователей, основанных на силе света, которые даже требуют наличия визуально однородной поверхности мишени, с ухудшением точности полученного результата, когда отражающая способность поверхности снижена.
С другой стороны, в некоторых недавних статьях описано использование магнитострикционных материалов как основы для конструирования датчиков положения. Эффект магнитострикции, который имеет место главным образом в случае ферромагнитных материалов, представляет собой изменение длины сегмента под действием магнитного поля, причем магнитострикционный материал расширяется или сжимается в ответ на изменение силы магнитного поля в той области, где находится сегмент. Этот эффект является симметричным относительно приложенного поля, с дисторсией (деформацией) только в одном направлении, независимо от сигнала магнитного поля.
Уже имеются некоторые области применения, в которых используют магнитострикционные материалы, например, при конструировании устройств для измерения магнитного поля и вращающего момента, однако до настоящего времени эти устройства редко используют в качестве датчиков положения. В качестве примеров таких устройств можно привести устройства, описанные в патентах JP 10253399-А и US 6232769-В1, а также в статье "Dynamic behavior of Terfenol-D", by Koshi Kondo; J. of Alloys and Compounds 258 (1997) 56-60, в статье "On the calibration of position sensor based on magnetic delay lines" by E.Hristoforou, H.Chiriac, M.Neagu, V.Karayannis; Sensors and Actuators, A 59 (1997) 89-93, в статье "A coily magnetostrictive delay line arrangement for sensing applications", by E.Hristoforou, D.Niarchos, H.Chiriac, M.Neagu; Sensors and Actuators A 91 (2001) 91-94, и в статье "New position sensor based on ultra acoustic standing waves in FeSiB amorphous wires", by H.Chiriac, C.S.Marinescu; Sensors and Actuators 81 (2000) 174-175. Все приведенные выше публикации основаны на принципе распространения акустической волны через соединительный стержень (шток/стержень) или на использовании волновода, изготовленного из магнитострикционного материала. Датчик является индукционным или оптическим, и положение определяют путем измерения временного интервала, связанного с положением излучающего элемента, бобины, магнита или электромагнитного элемента. Во всех таких датчиках необходимо использование электронной схемы, расположенной в непосредственной близости от места измерения и имеющей динамический диапазон от 30 до 300 мм.
Аналогичным образом, устройство для измерения положения, описанное в патенте США No.5821743, представляет собой устройство, которое содержит магнитострикционный волновод, который проходит через измеряемое поле, и средство создания сигнала, которое показывает положение магнита. Указанное устройство снабжено пьезокерамическим элементом.
В патенте США No.5394488, где описан датчик скорости, и в статье "А magnetostrictive sensor interrogated by fiber gratings for DC-current and Temperature discrimination", by J.Mora, A.Diez, J.L.Cruz, M.V.Andres; IEEE Photonics Tech. Letters 12 (2000) 1680-1682, несмотря на то, что в них и нет ссылки на измерение положения, решены проблемы за счет совместного использования магнитострикционного материала и датчиков в виде волоконно-оптической брэгговской решетки, используемых также в соответствии с настоящим изобретением.
За счет использования информации относительно оптического спектра датчики в виде волоконно-оптической брэгговской решетки позволяют осуществить легко уплотняемое абсолютное измерение в тех применениях, в которых традиционные измерительные системы оказались неэффективными. Изменения значений длины волны датчика в виде волоконно-оптической брэгговской решетки связаны с изменениями температуры и деформациями следующим уравнением:

в котором λв представляет собой значение, в метрах, длины волны, отраженной датчиком, ΔT представляет собой изменение температуры, °С, и отражает деформацию датчика, в м/м, a K1 и К2 представляют собой постоянные коэффициенты, которые зависят от специфического устройства.
Различные виды техники используют в различных типах известных в настоящее время датчиков положения: емкостную, оптическую, индукционную и волоконно-оптическую технику.
Наиболее широко используют технику электрической индукции в качестве принципа функционирования. Основным преимуществом датчика положения этого типа над другими датчиками является его высокая прочность, так как за счет отсутствия физического контакта происходит малый износ чувствительного элемента датчика. Большим преимуществом по сравнению с другими датчиками является способность такого датчика работать без снижения рабочих параметров в тяжелых условиях, например, в условиях повышенной влажности и вибраций. Более того, такие датчики не чувствительны к электромагнитным помехам.
В самых последних разработках датчиков используют элементы волоконной оптики. Существует не одна, а несколько областей, в которых используют элементы волоконной оптики в качестве световода при проведении измерения. Среди таких областей можно указать брэгговские сети, которые, однако, до настоящего времени не применяли в датчиках положения.
Большим преимуществом волоконно-оптических датчиков и измерительных преобразователей, кроме их высоких рабочих параметров и простоты конструкции, является отсутствие электрических сигналов в непосредственной близости от точки измерения, что делает такие датчики и измерительные преобразователи безопасными для применений во взрывоопасных зонах.
Краткое изложение изобретения
Задачей настоящего изобретения является создание датчика положения, основанного на технологии брэгговских сетей, с использованием надежной и прочной волоконной оптики, для фонтанной задвижки внутри нефтяной скважины.
Задачей настоящего изобретения является создание волоконно-оптического датчика положения для перемещений по одной оси, основанного на свойствах магнитострикции, в котором использованы брэгговские сети в качестве чувствительных элементов.
Разработана волоконно-оптическая система измерения положения для перемещений по одной оси, основанная на использовании датчиков в виде волоконно-оптической брэгговской решетки и свойств магнитострикционного материала. Изменения в относительном положении между источником магнитного поля и сегментом магнитострикционного материала (подключенным к датчикам в виде волоконно-оптической брэгговской решетки) вызывают изменения размера этого сегмента, что приводит к изменениям длины волны, отражаемой датчиками в виде волоконно-оптической брэгговской решетки. Когда пространственная зависимость магнитного поля известна, отраженную датчиками длину волны можно связать со смещением, которое произошло. Настоящее изобретение также имеет отношение к способу калибровки положения волоконно-оптического датчика положения.
Для решения указанных задач предлагается волоконно-оптический датчик положения, который содержит следующие компоненты: магнитный или электромагнитный элемент; по меньшей мере один сегмент магнитострикционного материала; датчики в виде волоконно-оптической брэгговской решетки; стержень материала, непроницаемого для магнитных полей; оптическое волокно (световод), причем указанные датчики по меньшей мере объединены и прикреплены к сегменту магнитострикционного материала, при этом по меньшей мере один из указанных сегментов магнитострикционного материала прикреплен к стержню, причем деформация стержня относительно магнитного или электромагнитного элемента ограничена в направлении оси стержня.
Краткое описание чертежей
Указанные ранее и другие характеристики изобретения будут более ясны из последующего детального описания, данного в качестве примера, не имеющего ограничительного характера и приведенного со ссылкой на сопроводительные чертежи, которые являются неотъемлемой частью настоящего изобретения.
На фиг.1 показана базовая конфигурация датчика положения в соответствии с одним вариантом настоящего изобретения. Позицией 1 на фиг.1 показан магнитный или электромагнитный элемент.
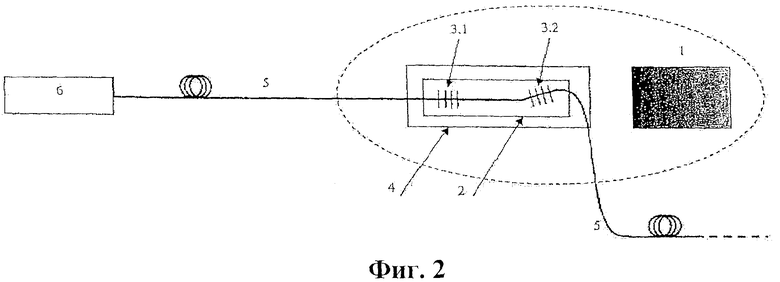
На фиг.2 показан первый вариант базовой конфигурации датчика положения в соответствии с настоящим изобретением.
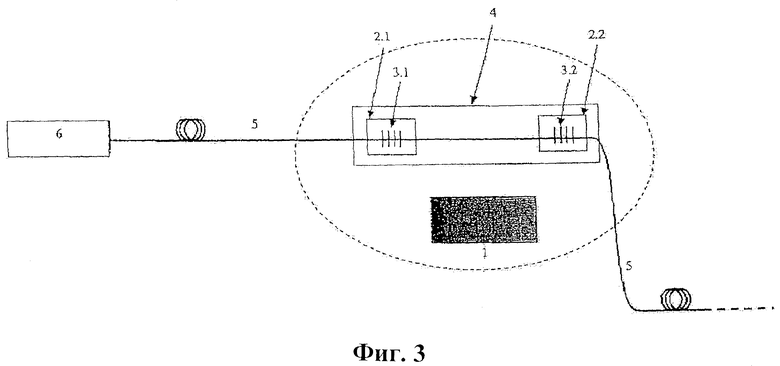
На фиг.3 показан второй вариант базовой конфигурации датчика положения в соответствии с настоящим изобретением.
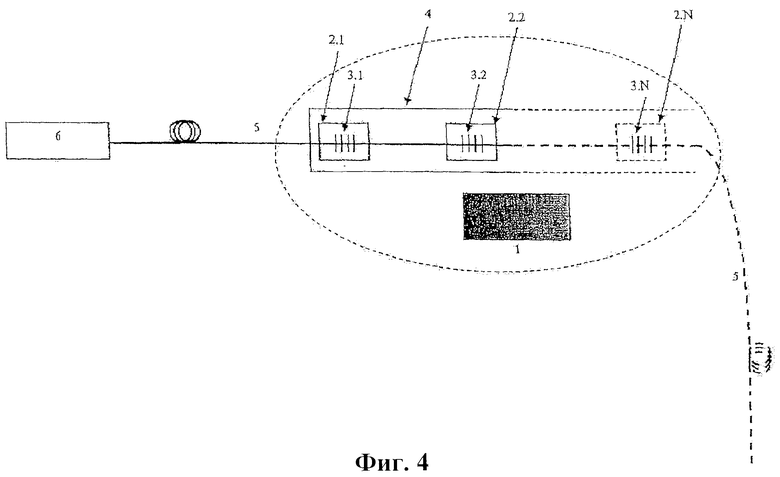
На фиг.4 показано соединение модулей, которое соответствует их соединению во втором варианте базовой конфигурации датчика положения в соответствии с настоящим изобретением.
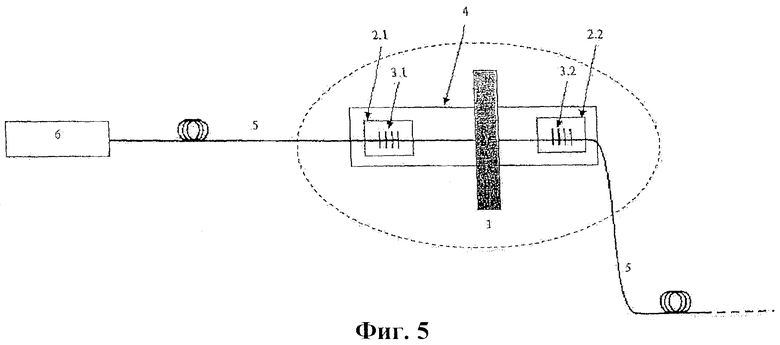
На фиг.5 показан третий вариант базовой конфигурации датчика положения в соответствии с настоящим изобретением.
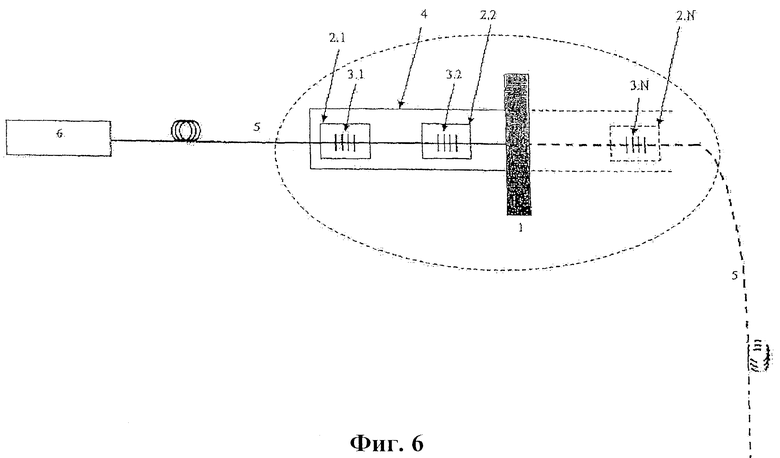
На фиг.6 показано соединение модулей, которое соответствует их соединению в третьем варианте базовой конфигурации датчика положения в соответствии с настоящим изобретением.
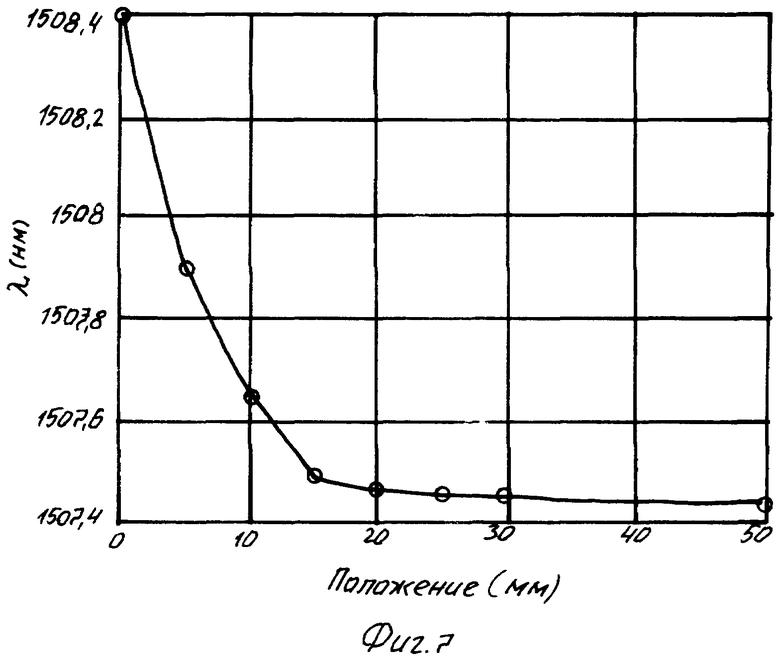
На фиг.7 показан пример графика измерений длины волны для двух датчиков в виде волоконно-оптической брэгговской решетки, в функции положения, в базовой конфигурации датчика положения в соответствии с настоящим изобретением.
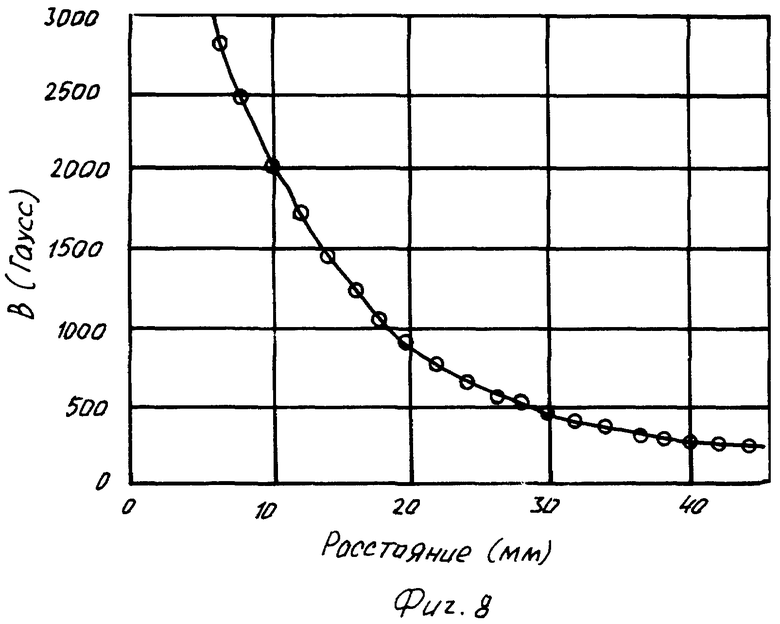
На фиг.8 показан пример графика, на котором приведена пространственная зависимость магнитного поля в применении базовой конфигурации датчика положения в соответствии с настоящим изобретением.
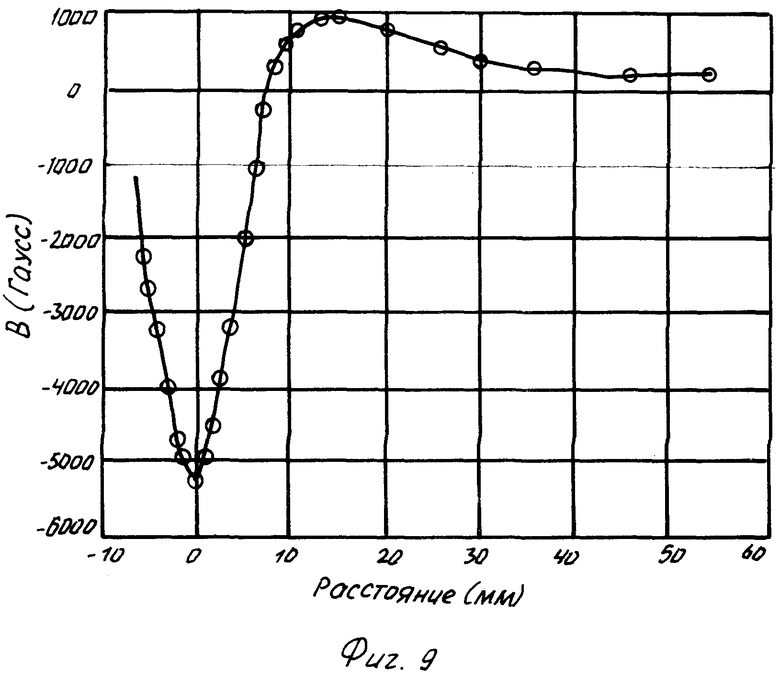
На фиг.9 показан пример графика, на котором приведена пространственная зависимость магнитного поля в третьем варианте базовой конфигурации датчика положения в соответствии с настоящим изобретением.
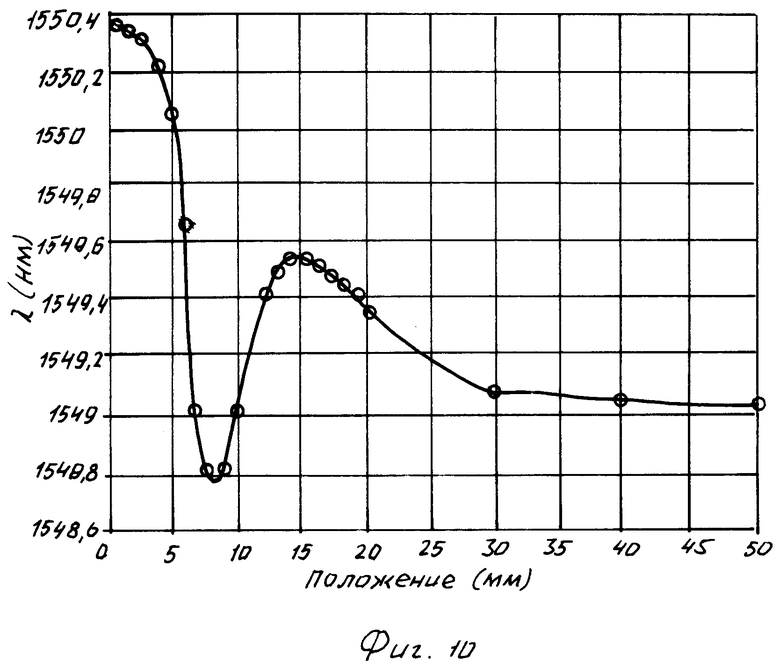
На фиг.10 показан пример графика измерений длины волны для двух датчиков в виде волоконно-оптической брэгговской решетки, в функции положения, в третьем варианте базовой конфигурации датчика положения в соответствии с настоящим изобретением.
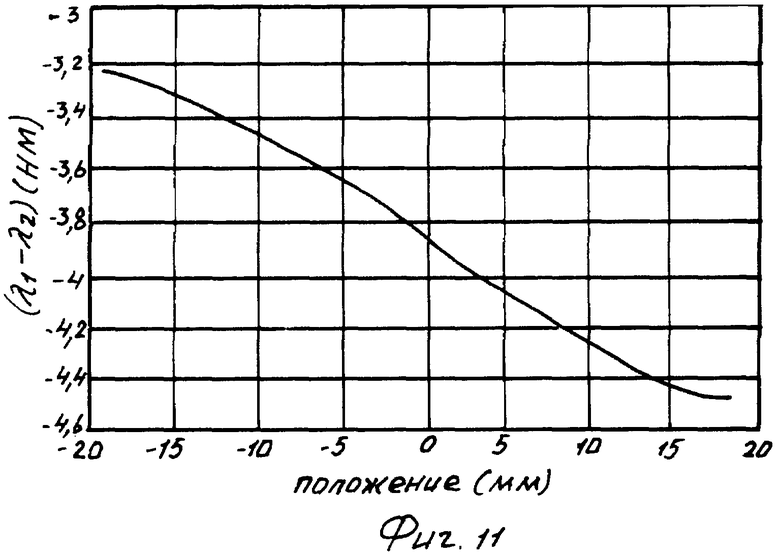
На фиг.11 показан пример графика, связывающего разность измерений длин волн, проведенных при помощи двух датчиков в виде волоконно-оптической брэгговской решетки, с положением, в третьем варианте базовой конфигурации датчика положения в соответствии с настоящим изобретением.
Подробное описание изобретения
Далее приведено подробное описание волоконно-оптического датчика положения, содержащего магнитострикционный материал и датчики (с чувствительными элементами) в виде волоконно-оптической брэгговской решетки, в фонтанных задвижках (в фонтанных штуцерах), который подходит для использования в наземных и прибрежных морских установках с глубокими скважинами.
Этот датчик положения является стойким к высоким давлениям и температурам, имеет высокую чувствительность, простую конструкцию, является компактным и использует датчики в виде волоконно-оптической брэгговской решетки (FBG) с магнитострикционным материалом.
Принцип, на котором основано настоящее изобретение, связан с относительным смещением между источником магнитного поля и сегментом магнитострикционного материала, который соединен с одним или несколькими датчиками в виде волоконно-оптической брэгговской решетки. Изменения относительного положения источника магнитного поля и сегмента магнитострикционного материала вызывают изменения размера этого сегмента и по этой причине вызывают изменения размера датчика, с которым он соединен, что приводит к изменениям длин волн, отраженных датчиками в виде волоконно-оптической брэгговской решетки. Когда пространственная зависимость магнитного поля известна, длины волн, отраженных датчиком, можно связать со смещением, которое произошло.
Так как температура представляет собой фактор, который также может вызывать изменения длины волны датчика в виде волоконно-оптической брэгговской решетки, то в соответствии с настоящим изобретением используют по меньшей мере два датчика в виде волоконно-оптической брэгговской решетки, что гарантированно позволяет производить необходимую компенсацию влияния температуры.
Другими характеристиками настоящего изобретения являются следующие:
- датчик может быть изготовлен из постоянного магнита и/или с применением магнитного поля.
- датчики в виде волоконно-оптической брэгговской решетки преимущественно изготавливают из одного и того же оптического волокна. Преимуществом такого решения является простота, так как при этом можно исключать оптические соединительные элементы, а также возможность измерения других длин через это же самое волокно.
Схема базовой конфигурации датчика положения в соответствии с примерным вариантом настоящего изобретения показан на фиг.1. Магнитный или электромагнитный элемент, именуемый далее магнитом 1, преимущественно изготовленный из NdFeB (неодим, железо, бор), и стержень 4, изготовленный из материала, непроницаемого для магнитных полей, совмещены таким образом, что они могут испытывать относительное смещение только вдоль оси стержня 4. Сегмент 2 магнитострикционного материала, который прикреплен к концу стержня 4, может быть изготовлен, например, из металлического сплава TbDyFe (тербий, диспрозий и железо), такого как ТХ, Terphenol-D или другие сплавы. Магнит 1 и конец стержня 4 должны находиться достаточно близко друг к другу, так чтобы относительные смещения между ними вызывали изменения размеров сегмента магнитострикционного материала 2, которые может измерять система считывания 6. Датчики 3.1 и 3.2 в виде волоконно-оптической брэгговской решетки, которые должны иметь различные длины волн, равные соответственно λ1 и λ2, должны быть изготовлены из одного и того же оптического волокна 5. В базовой конфигурации изобретения, показанной на фиг.1, только один из датчиков в виде волоконно-оптической брэгговской решетки (3.1 или 3.2) прикреплен к сегменту 2 магнитострикционного материала. Не имеет значения, какой из датчиков прикреплен, это может быть как первый, так и второй датчик. Крепление может быть осуществлено, например, при помощи эпоксидной смолы или цианакрилового клея или при помощи другого способа крепления, который может быть использован для соединения датчиков с сегментами, диапазон деформаций или температур которых желательно измерить. На фиг.1 в качестве примера показано, что датчик 3.2 прикреплен к сегменту 2 магнитострикционного материала, в то время как датчик 3.1 является свободным. Это означает, что только датчик 3.1 будет претерпевать изменения своей длины волны λ1 в функции возможных изменений температуры, в то время как датчик 3.2, в дополнение к изменениям этого типа, будет претерпевать изменения своей длины волны λ2 в функции деформаций за счет расширения или сжатия сегмента 2 магнитострикционного материала, вызванных изменениями магнитного поля.
На фиг.1 в качестве примера показано, что датчик 3.2 в осевом направлении совмещен с осью стержня 4. Так как магнитострикционный материал претерпевает изменения размера при изменениях магнитного поля, в котором он находится, сохраняя однако постоянным свой объем, то датчик 3.2 (который прикреплен к сегменту 2 магнитострикционного материала) может быть совмещен с любым направлением, так что осевое направление представляет собой только одно из возможных направлений.
Система 6 считывания посылает луч света через оптическое волокно 5. Когда свет достигает датчика 3.1, часть падающего света отражается на длине волны λ1 датчика 3.1, в то время как остальная часть света пропускается дальше и поступает к датчику 3.2. Когда свет падает на датчик 3.2, происходит аналогичный процесс: часть падающего света отражается на длине волны λ2 датчика 3.2, а остальная часть света пропускается дальше и проходит вдоль оптического волокна 5. Свет, отраженный от каждого из датчиков (3.1 и 3.2), принимается системой считывания 6, где он анализируется.
Одна из возможных конфигураций системы считывания 6 содержит широкополосный источник света, блок сопряжения и систему анализа и обнаружения. В качестве альтернативы датчик положения в соответствии с вариантом настоящего изобретения может быть оперативно соединен с любой применимой конфигурацией, позволяющей производить опрос датчиков в виде волоконно-оптической брэгговской решетки.
Когда происходит смещение между магнитом 1 и стержнем 4, система считывания 6 будет выдавать другое значение λ2.
Если имеются изменения температуры в области датчиков 3.1 и 3.2, то система считывания 6 будет выдавать другие значения λ1 и λ2. Устройство в соответствии с вариантом настоящего изобретения предварительно калибруют по температуре, то есть заранее строят кривые, которые дают информацию об изменениях λ1 и λ2 при изменении температуры. В этой базовой конфигурации настоящего изобретения предварительную калибровку проводят для датчика 3.2, который прикреплен к сегменту 2 магнитострикционного материала таким образом, что температурная градуировочная кривая для датчика 3.2 будет принимать в расчет эффект температурной деформации сегмента 2 магнитострикционного материала. Так как отсутствует градиент температуры при коротком расстоянии между датчиками 3.1 и 3.2, то, когда уравнение (I) применяют последовательно к датчикам 3.1 и 3.2, это позволяет производить температурную компенсацию и идентификацию части диапазона λ2, вызванного исключительно воздействием магнитного поля на сегмент 2 магнитострикционного материала.
Значения, которые получает λ2 длина волны, в функции положения стержня 4 относительного магнита 1, с уже вычтенным возможным влиянием температуры, позволяют построить градуировочную кривую положения устройства в соответствии с вариантом настоящего изобретения в базовой конфигурации, показанным на фиг.1.
На фиг.7 показан пример градуировочной кривой, построенной для базовой конфигурации настоящего изобретения, с использованием постоянного магнита 1. Нулевая точка положения находится в магните 1 рядом с сегментом 2 магнитострикционного материала. Этот элемент генерирует магнитное поле в функции осевого расстояния, показанное в виде графика на фиг.8. Так как в этом варианте поле спадает при увеличении расстояния вдоль оси, то увеличение относительного расстояния между стержнем 4 и магнитом 1 вызывает уменьшение размера сегмента 2 магнитострикционного материала в осевом направлении. Если температура остается постоянной и датчик 3.2 остается совмещенным с осевым направлением, как это показано в качестве примера на фиг.1, то будет происходить уменьшение значения λ2. Это показано на кривой фиг.7 с учетом ранее описанной компенсации температуры.
Для всех трех вариантов базовой конфигурации настоящего изобретения, описанных ниже, прохождение света соответствует описанному ранее для базовой конфигурации изобретения: часть света, излучаемого системой считывания 6, отражается датчиками 3.1 и 3.2 на их соответствующих длинах волн, λ1 и λ2, и затем возвращается в систему считывания 6, где анализируется.
В первом варианте базовой конфигурации настоящего изобретения, схема которого приведена на фиг.2, единственным отличием от базовой конфигурации, показанной на фиг.1, является то, что оба датчика в виде волоконно-оптической брэгговской решетки, 3.1 и 3.2, прикреплены к сегменту 2 магнитострикционного материала. В этой конфигурации (фиг.2) датчики 3.1 и 3.2 должны быть совмещены с различными направлениями. Они не должны быть параллельными. За счет этого, когда происходит относительное смещение между магнитом 1 и стержнем 4, оба датчика 3.1 и 3.2 будут испытывать деформации, сопровождающиеся магнитными воздействиями на сегмент 2 магнитострикционного материала, которые являются различными. Каждый из датчиков, 3.1 и 3.2, будет сопровождаться изменениями размера сегмента 2 магнитострикционного материала в том направлении, с которым совмещен датчик 3.1 или 3.2. За счет этого в варианте, показанном на фиг.2, когда происходит смещение между магнитом 1 и стержнем 4, система считывания 6 будет соответственно выдавать различные показания для λ1 и λ2. Если имеется диапазон изменений температуры в области датчиков, то система считывания 6 тоже будет выдавать диапазон показаний для λ1 и λ2, однако этот диапазон не будет иметь такой же характер изменения по причине относительного изменения положения между магнитом 1 и стержнем 4.
Индивидуальные деформации, вызванные магнитным воздействием на датчики 3.1 и 3.2, зависят от постоянного объема магнитострикционного материала сегмента 2. Как уже было упомянуто выше, устройство в соответствии с примерным вариантом настоящего изобретения предварительно калибруют по температуре. В этом первом варианте (фиг.2) базовой конфигурации настоящего изобретения предварительную калибровку проводят для датчиков 3.1 и 3.2, которые прикреплены к сегменту 2 магнитострикционного материала, таким образом, что соответствующая температурная градуировочная кривая для этих датчиков будет учитывать эффект теплового расширения сегмента 2 магнитострикционного материала. При известных значениях длин волн, отражаемых датчиками 3.1 и 3.2, и информации относительно деформации, претерпеваемой каждым датчиком, это же самое уравнение (I) применимо для каждого из датчиков, при проведении процесса компенсации температуры, аналогичного описанному ранее для базовой конфигурации настоящего изобретения. Так как длины волн λ1 и λ2 функционально связаны с объемом магнитострикционного материала сегмента 2, не имеет значения, какую длину волны λ1 и λ2 используют для построения градуировочной кривой для положения устройства. После выбора значений длин волн, λ1 и λ2, принимая во внимание функцию положения стержня 4 относительно магнита 1, с уже вычтенными возможными влияниями температуры, получим градуировочную кривую положения устройства в соответствии с примерным вариантом настоящего изобретения, в первом варианте, показанном на фиг.2.
Второй вариант базовой конфигурации устройства в соответствии с настоящим изобретением показан на фиг.3. Этот вариант может быть получен в результате соединения двух одинаковых модулей в базовой конфигурации изобретения, приведенной на фиг.1, за исключением того, что вместо использования только одного сегмента 2 магнитострикционного материала в этом варианте, приведенном на фиг.3, используют два одинаковых сегмента магнитострикционного материала, 2.1 и 2.2, каждый из которых прикреплен к одному из концов стержня 4. На каждом из сегментов магнитострикционного материала (2.1 и 2.2) прикреплен соответственно датчик (3.1 или 3.2) в виде брэгговской решетки. На фиг.3 датчики 3.1 и 3.2 показаны как идущие в одном и том же направлении, параллельно стержню 4, только в качестве примера способа легкого совмещения. Датчики 3.1 и 3.2 могут быть ориентированы в различных направлениях и могут отличаться друг от друга. Однако более сложный выбор не дает больших преимуществ. Магнит 1 расположен параллельно стержню 4, таким образом, что относительные смещения между ними происходят только в одном направлении, определяемом стержнем 4. В этой конфигурации изобретения (приведенной на фиг.3) сегменты 2.1 и 2.2 магнитострикционного материала будут претерпевать различные деформации в функции различных положений каждого из них относительно магнита 1.
По сравнению с базовой конфигурацией настоящего изобретения, показанной на фиг.1, и с первым вариантом, показанным на фиг.2, этот вариант, показанный на фиг.3, имеет преимущество, связанное с тем, что он позволяет произвести расширение динамического диапазона, так как уменьшение воздействия магнитного поля на сегмент магнитострикционного материала 2.1, например, за счет большого расстояния между этим сегментом и магнитом 1, может быть скомпенсировано увеличением такого воздействия на другой сегмент магнитострикционного материала (2.2) за счет результирующей аппроксимации между другим сегментом и магнитом 1.
Эта конфигурация настоящего изобретения, приведенная на фиг.3, также позволяет произвести еще большее расширение динамического диапазона за счет соединения нескольких таких же модулей. Используют несколько датчиков в виде волоконно-оптической брэгговской решетки, с различными длинами волн, каждый из которых закреплен соответственно на одном из различных сегментов магнитострикционного материала, смещенных вдоль стержня 4, как это показано на фиг.4. Изменения длин волн различных датчиков, принимаемые системой считывания 6, дают информацию об относительном смещении между магнитом 1 и стержнем 4. Может быть использовано несколько датчиков, причем расстояния между ними и значения их длин волн должны быть рассчитаны в функции конкретного данного применения. Калибровка относительно положения для этого набора различных соединенных модулей обсуждается далее более подробно.
Устройство в соответствии с примерным вариантом настоящего изобретения предварительно калибруют по температуре, как уже было описано выше. В этом втором варианте базовой конфигурации изобретения предварительную калибровку проводят соответственно для двух датчиков, 3.1 и 3.2, закрепленных на сегментах магнитострикционного материала (2.1 и 2.2), таким образом, что соответствующие градуировочные кривые этих датчиков температуры уже учитывают эффекты тепловой деформации соответствующих сегментов магнитострикционного материала (2.1 и 2.2). При наличии значений отраженных длин волн от датчиков 3.1 и 3.2 и при наличии информации относительно деформаций, претерпеваемых каждым датчиком, уравнение (I) применимо к каждому из датчиков. Процедура калибровки положения для этого второго варианта устройства обсуждается далее более подробно, при описании третьего варианта устройства в соответствии с примерным вариантом настоящего изобретения.
Третий вариант базовой конфигурации устройства в соответствии с примерным вариантом настоящего изобретения показан на фиг.5. В этом варианте сегменты 2.1 и 2.2 магнитострикционного материала, а также датчики 3.1 и 3.2 в виде волоконно-оптической брэгговской решетки установлены на концах стержня 4 аналогично описанному ранее со ссылкой на второй вариант базовой конфигурации настоящего изобретения. Аналогичным образом относительное смещение между магнитом 1 и стержнем 4 передается вдаль оси, что определяется стержнем 4. Однако в этой конфигурации, приведенной на фиг.4, магнит 1, который может иметь, например, цилиндрическую форму, имеет отверстие, преимущественно расположенное по центру так, что стержень 4 может проходить через него. По сравнению с конфигурацией, в которой магнит 1 проходит снаружи от стержня 4, показанной на фиг.3, конфигурация, показанная на фиг.5, имеет преимущество, так как обеспечивает большую близость между магнитом 1 и сегментами магнитострикционного материала (2.1 и 2.2), которая усиливает магнитное поле, что вызывает расширения динамического диапазона. Более того, используют аналогичную форму, уже описанную выше для второго варианта. Этот третий вариант базовой конфигурации настоящего изобретения, приведенный на фиг.5, также позволяет еще больше расширить динамический диапазон за счет соединения нескольких показанных модулей. На фиг.6 показана схема соединения модулей аналогично третьему варианту базовой конфигурации изобретения. Относительная калибровка положения для этого набора различных соединенных модулей может быть проведена в соответствии с последовательностью градуировочных кривых, каждая из которых построена с использованием пары последовательных датчиков, покрывающих, таким образом, всю длину стержня. Построение градуировочной кривой для пары датчиков (3.1 и 3.2) обсуждается далее более подробно.
В этом третьем варианте базовой конфигурации в соответствии с настоящим изобретением предварительную калибровку по температуре проводят аналогично тому, что описано выше для второго варианта, с использованием двух соответствующих датчиков 3.1 и 3.2, закрепленных на сегментах магнитострикционного материала (2.1 и 2.2), таким образом, что соответствующие градуировочные кривые для этих датчиков температуры учитывают эффекты тепловой деформации соответствующих сегментов магнитострикционного материала (2.1 и 2.2). При известных значениях длин волн, отражаемых датчиками 3.1 и 3.2, и наличии информации относительно деформации, претерпеваемой каждым датчиком, уравнение (I) применимо для каждого из датчиков.
Однако очень сложная геометрия магнита 1 сказывается также на магнитном поле, пространственная зависимость которого является более сложной. На фиг.9 показан график магнитного поля в функции расстояния для применения этого третьего варианта базовой конфигурации в соответствии с настоящим изобретением. На графике, приведенном на фиг.10, построенном по результатам измерений для такого же применения, можно видеть, что имеется не только одна зависимость между длиной волны одного из датчиков и положением стержня 4 относительно магнита 1. Эта проблема может быть решена путем нахождения зависимости между разностью (λ1-λ2) длин волн датчиков (3.1 и 3.2) и положением. Затем проводят процесс итерации, который изменяет расстояние между датчиками 3.1 и 3.2, задачей которого является максимальное расширение динамического диапазона положений, при сохранении неизменной зависимости между разностью длин волн и положением. Принимая во внимание эту разность длин волн датчиков 3.1 и 3.2, еще одним преимуществом будет компенсация возможного влияния температуры. График на фиг.11, построенный для того же самого применения, которое послужило основой для построения графиков фиг.9 и 10, показывает пример зависимости разности длин волн датчиков 3.1 и 3.2 и положения в этом третьем варианте базовой конфигурации в соответствии с настоящим изобретением.
По сравнению с существующими датчиками положения настоящее изобретение позволяет получить многочисленные преимущества за счет использования технологии оптических волокон, а именно: простота конструкции, уменьшенные размеры и вес, возможность проведения измерений в агрессивных средах, например, при высоких температурах, и возможность дистанционного считывания показаний, без необходимости иметь электронные схемы в точке проведения измерения. Более того, в отличие от измерительных преобразователей, основанных на электростатической индукции, настоящее изобретение позволяет исключить использование кабелей и электронных схем в непосредственной близости от места измерения. Однако аналогично таким измерительным преобразователям настоящее изобретение позволяет производить измерения с высокой точностью и достоверностью, так как за счет отсутствия физического контакта с источником магнитного поля исключен износ чувствительного элемента.
Устройство в соответствии с примерными вариантами настоящего изобретения обладает также и другими преимуществами, связанными с использованием существующих оптико-волоконных датчиков: оно легко может быть уплотнено, не имеет проблем с поверхностью, которая может быть грязной или может иметь низкую отражающую способность, причем, так как свет остается внутри оптического волокна, не требуется производить механическую юстировку.
Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят, однако, за рамки приведенной далее формулы изобретения и соответствуют его сущности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2674574C2 |
| НАПРАВЛЕНИЕ ОПТИЧЕСКИХ СИГНАЛОВ С ПОМОЩЬЮ ПОДВИЖНОГО ДИФРАКЦИОННОГО ОПТИЧЕСКОГО ЭЛЕМЕНТА | 2000 |
|
RU2256203C2 |
| РАМАНОВСКАЯ НАКАЧКА ВЫСШЕГО ПОРЯДКА БЕЗ ЗАТРАВКИ | 2016 |
|
RU2708811C2 |
| Способ лазерной связи в открытом пространстве и комплекс для его реализации | 2023 |
|
RU2831323C1 |
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2022 |
|
RU2813169C1 |
| ОПТОВОЛОКОННАЯ МУЛЬТИСЕНСОРНАЯ СИСТЕМА, ДАТЧИК ТЕМПЕРАТУРЫ/ДЕФОРМАЦИИ ДЛЯ ОПТОВОЛОКОННОЙ МУЛЬТИСЕНСОРНОЙ СИСТЕМЫ, СПОСОБ ЗАПИСИ ДАТЧИКА (ВАРИАНТЫ) | 2005 |
|
RU2319988C2 |
| ОПТИЧЕСКИЙ СПЕКТРАЛЬНЫЙ ФИЛЬТР И УСТРОЙСТВО РАЗДЕЛЕНИЯ КАНАЛОВ | 1997 |
|
RU2186413C2 |
| СПОСОБ РЕГИСТРАЦИИ СИГНАЛОВ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ НА ОСНОВЕ БРЭГГОВСКИХ РЕШЕТОК, ЗАПИСАННЫХ В ЕДИНОМ ВОЛОКОННОМ СВЕТОВОДЕ | 2009 |
|
RU2413259C1 |
| РАМАНОВСКИЙ ВОЛОКОННЫЙ ЛАЗЕР | 2000 |
|
RU2158458C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО РАЗДЕЛЕНИЯ/ОБЪЕДИНЕНИЯ СВЕТОВЫХ СИГНАЛОВ В ВОЛОКОННО-ОПТИЧЕСКИХ ЛИНИЯХ СВЯЗИ | 2002 |
|
RU2215312C1 |
Волоконно-оптический датчик положения содержит магнитный или электромагнитный элемент, широкополосный источник света, оптическое волокно, по меньшей мере два датчика в виде волоконно-оптической брэгговской решетки, изготовленные из оптического волокна, по меньшей мере один сегмент магнитострикционного материала, стержень, изготовленный из материала, непроницаемого для магнитных полей. По меньшей мере один из двух датчиков прикреплен к сегменту магнитострикционного материала, при этом по меньшей мере один из сегментов магнитострикционного материала прикреплен к стержню. Магнитный или электромагнитный элемент и стержень совмещены таким образом, что они могут испытывать относительное смещение только вдоль оси стержня. Указанное смещение вызывает изменение размеров сегмента магнитострикционного материала, что приводит к изменениям длины волны, отражаемой датчиками в виде волоконно-оптической брэгговской решетки. Технический результат заключается в обеспечении безопасности при применении датчика во взрывоопасных зонах за счет отсутствия электрических сигналов в непосредственной близости от точки измерения. 15 з.п. ф-лы, 11 ил.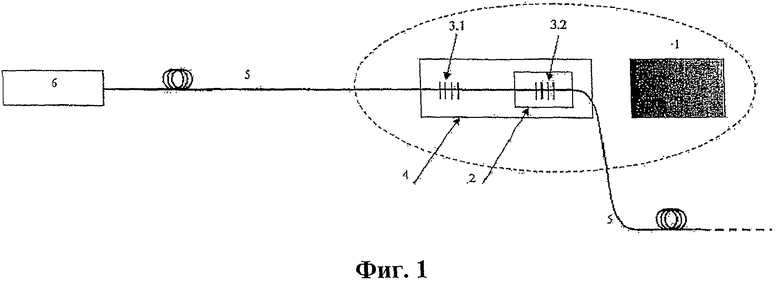
1. Волоконно-оптический датчик положения, содержащий: магнитный или электромагнитный элемент, широкополосный источник света, оптическое волокно, по меньшей мере два датчика в виде волоконно-оптической брэгговской решетки, изготовленные из оптического волокна, по меньшей мере один сегмент магнитострикционного материала, стержень, изготовленный из материала, непроницаемого для магнитных полей, причем по меньшей мере один из двух датчиков прикреплен к сегменту магнитострикционного материала, при этом по меньшей мере один из сегментов магнитострикционного материала прикреплен к стержню, причем магнитный или электромагнитный элемент и стержень совмещены таким образом, что они могут испытывать относительное смещение только вдоль оси стержня, причем указанное смещение вызывает изменение размеров сегмента магнитострикционного материала, что приводит к изменениям длины волны, отражаемой датчиками в виде волоконно-оптической брэгговской решетки.
2. Волоконно-оптический датчик положения по п.1, в котором по меньшей мере два датчика в виде волоконно-оптической брэгговской решетки имеют различные длины волн.
3. Волоконно-оптический датчик положения по п.1, в котором датчики в виде волоконно-оптической брэгговской решетки изготовлены из одного и того же оптического волокна.
4. Волоконно-оптический датчик положения по п.1, оперативно соединенный с удаленной системой считывания, которая содержит блок сопряжения и систему спектрального анализа и обнаружения.
5. Волоконно-оптический датчик положения по п.1, оперативно соединенный с подходящей конфигурацией для опроса датчиков в виде волоконно-оптической брэгговской решетки.
6. Волоконно-оптический датчик положения по п.1, в котором предусмотрен только один сегмент магнитострикционного материала, и только один из датчиков в виде волоконно-оптической брэгговской решетки прикреплен к этому сегменту.
7. Волоконно-оптический датчик положения по п.1, в котором предусмотрен только один сегмент магнитострикционного материала, к которому прикреплены два датчика в виде волоконно-оптической брэгговской решетки, ориентированные в различных направлениях.
8. Волоконно-оптический датчик положения по п.1, в котором каждый из датчиков в виде волоконно-оптической брэгговской решетки прикреплен к различному сегменту магнитострикционного материала.
9. Волоконно-оптический датчик положения по п.8, содержащий сегменты магнитострикционного материала, установленные с промежутками вдоль стержня таким образом, что возможна всего одна идентификация положения стержня относительно магнитного и электромагнитного элемента.
10. Волоконно-оптический датчик положения по п.1, в котором магнитный или электромагнитный элемент является сплошным и расположен напротив стержня или сбоку от него.
11. Волоконно-оптический датчик положения по п.1, в котором магнитный или электромагнитный элемент имеет отверстие, через которое проходит стержень.
12. Волоконно-оптический датчик положения по п.1, в котором магнитный или электромагнитный элемент изготовлен из NdFeB (неодим, железо, бор).
13. Волоконно-оптический датчик положения по п.1, в котором сегменты магнитострикционного материала изготовлены из сплавов металлов TbDyFe (тербий, диспрозий и железо).
14. Волоконно-оптический датчик положения по п.13, в котором сегменты магнитострикционного материала изготовлены из ТХ или Terphenol-D.
15. Волоконно-оптический датчик положения по п.1, расположенный внутри нефтяной скважины.
16. Волоконно-оптический датчик положения по п.15, расположенный в фонтанной задвижке.
| Устройство для сушки растворов,суспензий и эмульсий в кипящем слое инертных тел | 1982 |
|
SU1020734A1 |
| US 5394488 A, 28.02.1995 | |||
| US 2002071626 A1, 13.06.2002 | |||
| Магнитострикционный преобразователь перемещений | 1988 |
|
SU1562700A1 |

