Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным синхронным электрическим двигателям, электроприводам и генераторам, касается конструктивного исполнения бесконтактных синхронных магнитоэлектрических машин и может быть использовано в системах автоматики, в качестве тяговых управляемых и неуправляемых электроприводов, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов, многофазных синхронных электрических двигателей и генераторов преобразователей частоты и многофазных источников питания электрическим током.
Известна индукторная электрическая машина (Патент RU, 2009599 С1, МПК 5 Н02К 19/06, Н02К 19/24, авторы: Жуловян В.В.; Новокрещенов О.И.; Шаншуров Г.А.), содержащая явнополюсный с числом полюсов Z0 зубчатый статор с многофазной катушечной обмоткой, каждая катушка которой размещена на одном полюсе статора, безобмоточный ферромагнитный зубчатый ротор и преобразователь, к которому подключена обмотка статора, статор и ротор выполнены с четными и не равными друг другу числами зубцов и каждая фаза обмотки выполнена из p встречно включенных катушек, размещенных со сдвигом на двойное полюсное деление 2·τ, где p - число четное, 2·τ=Z0/p. Недостатком описанной индукторной электрической машины принято считать невысокие энергетические показатели. Кроме этого, указанные технические устройства чаще всего выполняют с малыми воздушными зазорами, что усложняет технологию и затрудняет их изготовление при массовом (серийном) производстве.
Известна принятая за прототип бесконтактная магнитоэлектрическая машина (Патент RU, 2354032 С1, МПК Н02К 21/12, Н02К 29/00, авторы: Чернухин В.М., Захаренко А.Б.), содержащая якорь с числом зубцов Z1=m·Z1m·с, где m=2, 3, 4, 5, 6 … - число фаз обмотки якоря, каждая из фаз состоит из катушек, охватывающих по одному зубцу якоря, и индуктор с полюсами, сердечник индуктора состоит из скрепленных между собой первого и второго сердечников и намагниченного в осевом направлении постоянного магнита, расположенного между сердечниками индуктора, первый и второй сердечники индуктора размещены друг относительно друга так, что ось каждого зубца первого сердечника совпадает с осью каждого паза второго сердечника индуктора, бесконтактная магнитоэлектрическая машина состоит из модулей - «элементарных машин», число зубцов на любом сердечнике индуктора Z2N=Z2S=(m·Z1m±1)·с, где с=1, 2, 3, 4 … - число модулей, Z1m=1, 2, 3, 4 … - число зубцов фазы якоря в одном модуле. Недостатком прототипа является худшее использование полезного объема машины по сравнению с заявляемым изобретением.
Целью настоящего изобретения является улучшение энергетических показателей, увеличение удельного момента на валу бесконтактной синхронной магнитоэлектрической машины за счет лучшего использования ее полезного объема.
Задачей настоящего изобретения является оптимальный выбор числа явно выраженных полюсов якоря и числа явно выраженных полюсов индуктора, возбуждаемых постоянными магнитами, которые могут быть расположены радиально, тангенциально и аксиально, при выполнении сосредоточенной на полюсах якоря m-фазной катушечной обмотки якоря бесконтактной модульной синхронной магнитоэлектрической машины.
Техническим результатом настоящего изобретения является обеспечение высоких энергетических показателей, большого удельного вращающего момента на валу в режиме электрического двигателя и большой удельной мощности в режиме электрического генератора бесконтактной модульной синхронной магнитоэлектрической машины.
С целью достижения задачи и технического результата изобретения бесконтактная синхронная магнитоэлектрическая машина состоит из модулей. Модуль представляет собой «элементарную машину» в составе бесконтактной синхронной магнитоэлектрической машины. Статор бесконтактной модульной синхронной магнитоэлектрической машины содержит шихтованный сердечник якоря с явно выраженными полюсами, катушечную m-фазную обмотку якоря, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря по одной на полюсе, ротор содержит индуктор с симметрично распределенными по цилиндрической поверхности явно выраженными полюсами, создающими магнитный поток возбуждения при помощи постоянных магнитов и образующими в рабочем воздушном зазоре чередующуюся полярность «N-S» магнитных полюсов. Индуктор крепится к немагнитной втулке или немагнитному валу (при малых диаметрах ротора). В настоящем изобретении индуктор является ротором, а якорь - статором. Возможны исполнения ротора с постоянными магнитами любого типа - с когтеобразными полюсами и аксиальным расположением постоянных магнитов, с радиальным размещением постоянных магнитов, с тангенциальным расположением постоянных магнитов (ротор «коллекторного типа»), мозаичный сборный ротор (типа РОМС). Возможны исполнения бесконтактной модульной синхронной магнитоэлектрической машины с внешним якорем и внутренним индуктором, с внутренним якорем и внешним индуктором.
В заявляемом изобретении бесконтактная модульная магнитоэлектрическая машина является синхронной машиной, так как частота вращения ее ротора строго пропорциональна частоте питающего напряжения и остается постоянной независимо от изменения механического момента нагрузки на валу (в режиме работы электрическим двигателем). Указанное устройство может питаться как непосредственно от источника переменного напряжения, так и работать в вентильном управляемом режиме.
При применении бесконтактной модульной синхронной магнитоэлектрической машины в качестве синхронного электрического двигателя питание обмотки якоря может осуществляться:
- от m-фазного источника переменного напряжения постоянной частоты,
- от m-фазного источника переменного напряжения регулируемой частоты,
- от источника постоянного напряжения посредством управляемого инвертора, подающего синусоидальное напряжение на фазы обмотки якоря в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
При применении бесконтактной модульной синхронной магнитоэлектрической машины в качестве электрического двигателя постоянного тока с независимым возбуждением питание обмотки якоря может осуществляться прямоугольными импульсами напряжения от электронного коммутатора по определенному алгоритму в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
Сущность изобретения поясняется фигурами чертежей:
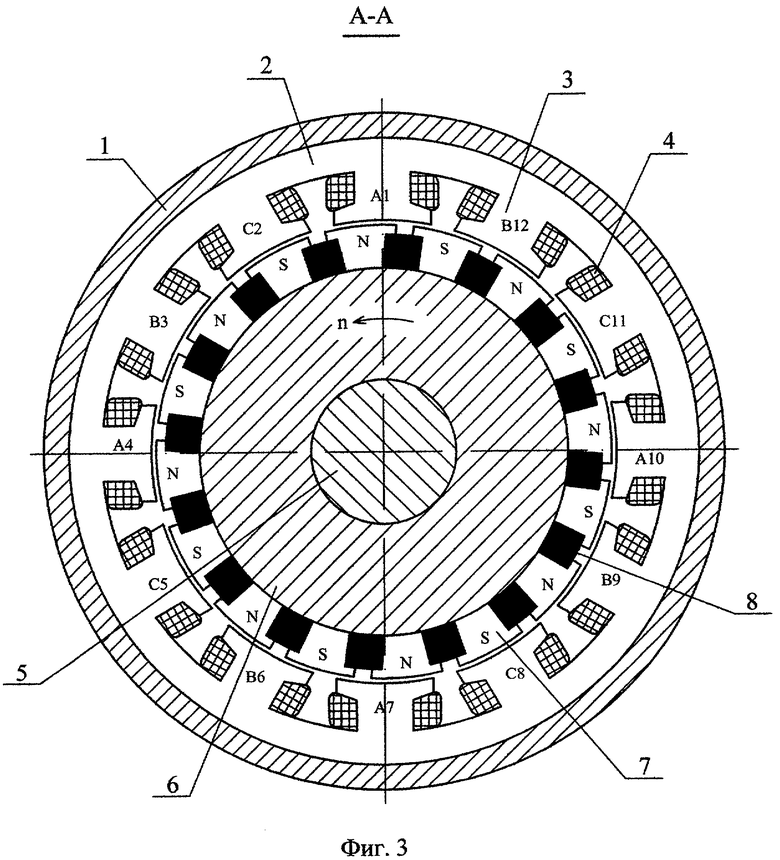
фиг.1, фиг.3 - примеры реализации изобретения в виде поперечных разрезов бесконтактной модульной синхронной магнитоэлектрической машины с ротором «коллекторного типа»,
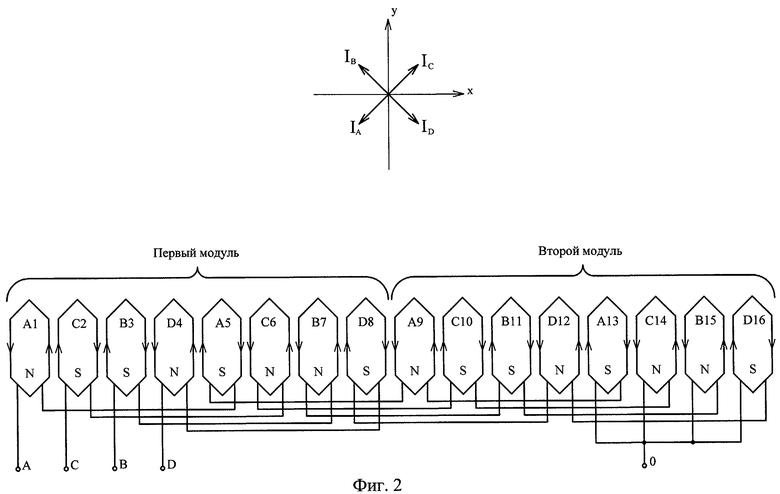
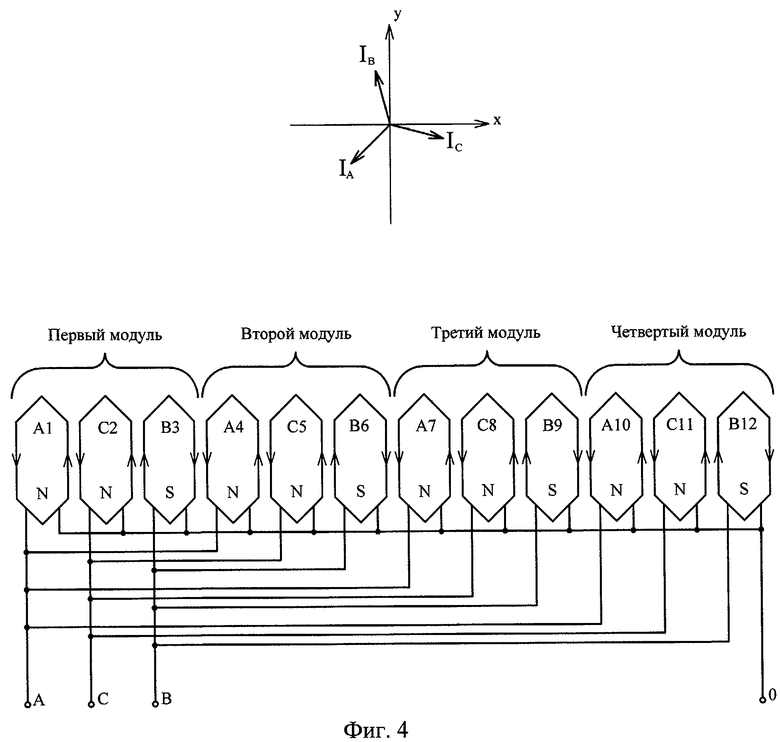
фиг.2, фиг.4 - примеры реализации изобретения в виде схем соединений катушек m-фазных обмоток якоря при работе бесконтактной модульной синхронной магнитоэлектрической машины в режиме электрического двигателя и векторных диаграмм фазных токов якоря,
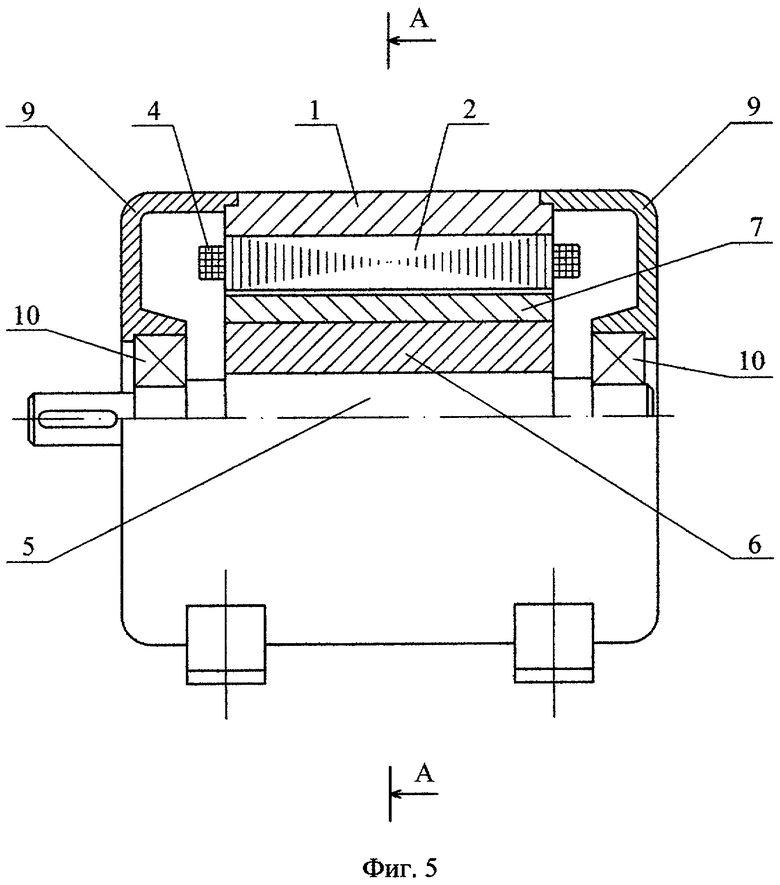
фиг.5 - общий вид бесконтактной модульной синхронной магнитоэлектрической машины с внешним якорем и внутренним индуктором.
В соответствии с настоящим изобретением для получения наилучших энергетических показателей при максимальном удельном моменте на валу бесконтактной модульной синхронной магнитоэлектрической машины число явно выраженных полюсов якоря Z1p, число фаз m-фазной обмотки якоря m=3, 4, 5, 6, …, число явно выраженных полюсов в фазе модуля якоря Z1c, число модулей с=1, 2, 3, 4, … и число явно выраженных полюсов индуктора Z2p связаны равенствами (1) и (2):


причем при m=3, 5, 7, 9, … число явно выраженных полюсов в фазе модуля якоря Z1c=1, при m=4, 6, 8, 10, … число явно выраженных полюсов в фазе модуля якоря Z1c=2, катушки обмотки в фазе модуля якоря при Z1c=2 соединены между собой согласно в магнитном отношении, соответствующие катушки обмотки фазы якоря разных модулей соединены в магнитном отношении встречно, начала фаз обмотки якоря могут принадлежать катушкам, сосредоточенным на явно выраженных полюсах одного из модулей, либо - соответствующим катушкам любого модуля, катушки обмотки якоря, принадлежащие одной фазе и одному или разным модулям, могут быть соединены между собой последовательно, параллельно или образовывать последовательно-параллельные электрические цепи, концы фаз модулей обмотки, либо концы фаз обмотки якоря при этом соединены между собой накоротко.
Модуль MZ удобно обозначать в виде несократимой дроби MZ=Z1p/Z2p, показывающей соотношение числа явно выраженных полюсов якоря и числа явно выраженных полюсов индуктора в «элементарной машине».
Следует отметить, что направление вращения индуктора в режиме работы бесконтактной модульной синхронной магнитоэлектрической машины электрическим двигателем совпадает с направлением вращения кругового магнитного поля якоря, созданного многофазной системой переменных электрических токов, протекающих по обмотке якоря.
На фиг.1-4 представлены примеры реализации изобретения в соответствии с равенствами (1) и (2). Положение векторов фазных токов якоря на векторной диаграмме, направления электрических токов, протекающих по катушкам обмотки якоря схемы соединений катушек 4х-фазной обмотки якоря, показанные на фиг.2, и положение сердечника индуктора относительно сердечника якоря бесконтактной модульной синхронной магнитоэлектрической машины в двигательном режиме, показанное на фиг.1, соответствуют одному и тому же моменту времени. Положение векторов фазных токов якоря на векторной диаграмме, направления электрических токов, протекающих по катушкам обмотки якоря схемы соединений катушек 3х-фазной обмотки якоря, показанные на фиг.4, и положение сердечника индуктора относительно сердечника якоря бесконтактной модульной синхронной магнитоэлектрической машины в двигательном режиме, показанное на фиг.3, соответствуют одному и тому же моменту времени. На фиг.2 представлена схема соединений катушек 4х-фазной обмотки якоря для 2х-модульной электрической машины, у которой все катушки обеих модулей, принадлежащие одной фазе, включены между собой последовательно. На фиг.4 представлена схема соединений катушек 3х-фазной обмотки якоря для 4х-модульной электрической машины, у которой все катушки, принадлежащие одной фазе, но разным модулям, включены между собой параллельно.
Рассмотрим конструкцию бесконтактной модульной синхронной магнитоэлектрической машины с внешним якорем и внутренним индуктором, представляющим собой ротор «коллекторного типа» (фиг.1, фиг.3, фиг.5). Перемагничиваемый с высокой частотой сердечник 2 якоря имеет явно выраженные полюса 3 и выполнен шихтованным из изолированных листов электротехнической стали с высокой магнитной проницаемостью. Он запрессован в корпусе 1, который может быть выполнен из стали или из сплава алюминия. Возможен также и бескорпусный вариант. На каждом из явно выраженных полюсов 3 якоря размещена катушка обмотки 4 якоря. Катушки обмотки 4 якоря выполняются из обмоточного медного провода или обмоточной медной шины. Они изолируются от ярма и явно выраженных полюсов 3 сердечника 2 якоря корпусной изоляцией. Индуктор при помощи подшипников 10, вала 5 и подшипниковых щитов 9 позиционирован относительно якоря. Вал 5 выполнен из стали. Активная часть индуктора собирается из тангенциально расположенных постоянных магнитов 8 и чередующимися с ними явно выраженными полюсами 7 таким образом, чтобы в рабочем воздушном зазоре образовывалась чередующаяся полярность полюсов «N-S» индуктора, и крепится к втулке 6, выполненной из немагнитного материала (чаще всего - из сплава алюминия). Явно выраженные полюса 7 индуктора выполняются из материала с высокой магнитной проницаемостью и могут быть набраны из сегментарных листов электротехнической стали, скрепленных между собой в аксиальном направлении в пакеты, образующими полюса, а могут представлять собой цельные полюса из магнитомягкого материала, обработанные механически. Немагнитная втулка 6 необходима для того, чтобы магнитный поток возбуждения не замыкался сам на себя, минуя рабочий воздушный зазор. Магнитный поток индуктора (фиг.1, фиг.3) выходит из постоянных магнитов с полярностью «N» в тангенциальном направлении, проходит через явно выраженные полюса 7 индуктора вначале в тангенциальном направлении, затем в радиальном направлении в сторону воздушного зазора, пронизывает воздушный зазор между индуктором и якорем, проходит через явно выраженные полюса 3 якоря в радиальном направлении от воздушного зазора, ярмо сердечника 2 якоря в тангенциальном направлении, далее через явно выраженные полюса 3 якоря в радиальном направлении в сторону воздушного зазора, пронизывает воздушный зазор между индуктором и якорем, входит в явно выраженные полюса 7 индуктора в радиальном направлении, а затем в постоянные магниты с полярностью «S», замыкая таким образом магнитную цепь.
Бесконтактная модульная синхронная магнитоэлектрическая машина может работать в двигательном и генераторном режимах.
Рассмотрим двигательный режим (фиг.1÷5). На фазы обмотки 4 якоря от источника питания подают переменное напряжение, по обмотке протекает переменный ток, наводящий переменную во времени МДС якоря. На фиг.2 показана векторная диаграмма фазных токов якоря и схема соединений катушек 4х-фазной обмотки якоря для 2х-модульной машины. На фиг.4 показана векторная диаграмма фазных токов якоря и схема соединений катушек 3х-фазной обмотки якоря для 4х-модульной машины. Симметричные многофазные напряжения, поданные на зажимы этих обмоток, изменяются во времени, и векторы токов на векторных диаграммах поворачиваются в осях координат xy против часовой стрелки. Направления электрических токов, показанные на схемах соединений катушек обмоток якоря, соответствуют моменту времени, когда фазные токи на векторных диаграммах проецируются на ось ординат. Катушки обмотки 4 якоря названы буквой, обозначающей принадлежность к соответствующей фазе, и цифрой, обозначающей номер явно выраженного полюса 3 сердечника 2 якоря. Например, катушка А1 - катушка фазы А, расположенная на первом явно выраженном полюсе 3 сердечника 2 якоря. При протекании по катушкам обмотки 4 якоря переменного электрического тока явно выраженные полюса 3 якоря, намагничиваясь, образуют изменяющиеся во времени южные магнитные полюса «S» и северные магнитные полюса «N» с переменной МДС якоря. Явно выраженные полюса 7 индуктора возбуждены постоянными магнитами 8 и образуют неизменяющиеся во времени и с постоянной МДС южные магнитные полюса «S» и северные магнитные полюса «N» индуктора с чередующейся полярностью. Вследствие взаимодействия переменной МДС якоря с постоянной МДС индуктора к ротору приложен однонаправленный вращающий момент. В соответствии с настоящим изобретением за один период изменения магнитного поля ротор поворачивается на два полюсных деления индуктора, т.е. на 2·t2p, где t2p=360°/Z2p. Вследствие этого, при изменении питающих фазных напряжений, поданных на обмотку якоря с частотой f (Гц), ротор перемещается с синхронной частотой вращения n=120·f/Z2p (об/мин). Направление вращения ротора на фиг.1 и фиг.3 показано стрелкой с буквой «n».
Рассмотрим генераторный режим (фиг.1÷5). При вращении ротора сторонним источником момента с частотой вращения n постоянный магнитный поток индуктора, созданный постоянными магнитами 8, пронизывая воздушный зазор и явно выраженные полюса 3 якоря то со стороны индуктора, то со стороны якоря, создает в явно выраженных полюсах 3 якоря переменный магнитный поток, наводящий в катушках обмотки 4 якоря переменную ЭДС. В катушках обмотки 4 якоря, принадлежащих одной фазе, в любой момент времени наводятся одинаковые по величине ЭДС, которые, суммируясь, образуют ЭДС этой фазы. Если внешняя цепь - цепь нагрузки замкнута, то по обмотке 4 якоря протекает m-фазный электрический ток, электрическая мощность отдается потребителю.
Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным синхронным электрическим двигателям, электроприводам и генераторам, касается особенностей конструктивного исполнения бесконтактных синхронных магнитоэлектрических машин и может быть использовано в системах автоматики, в качестве тяговых управляемых и неуправляемых электроприводов, в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов, многофазных синхронных электрических двигателей и электрических генераторов преобразователей частоты, а также в качестве многофазных источников питания электрическим током. Предлагаемая бесконтактная модульная синхронная магнитоэлектрическая машина состоит из модулей - «элементарных машин» и содержит статор, сердечник якоря которого выполнен шихтованным и имеет явно выраженные полюса с катушечной m-фазной обмоткой якоря, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря по одной на полюсе, и ротор, содержащий индуктор с симметрично распределенными по цилиндрической поверхности, явно выраженными полюсами с чередующейся полярностью, возбуждаемыми постоянными магнитами. При этом выполняются определенные соотношения между числом явно выраженных полюсов якоря, числом фаз m-фазной обмотки якоря, числом явно выраженных полюсов в фазе модуля якоря, числом модулей и числом явно выраженных полюсов индуктора. Достигаемый при использовании данного изобретения технический результат состоит в обеспечении высоких энергетических показателей, большого удельного вращающего момента на валу в режиме электрического двигателя и большой удельной мощности в режиме электрического генератора бесконтактной модульной синхронной магнитоэлектрической машины за счет лучшего использования полезного объема данной машины. 6 з.п. ф-лы, 5 ил.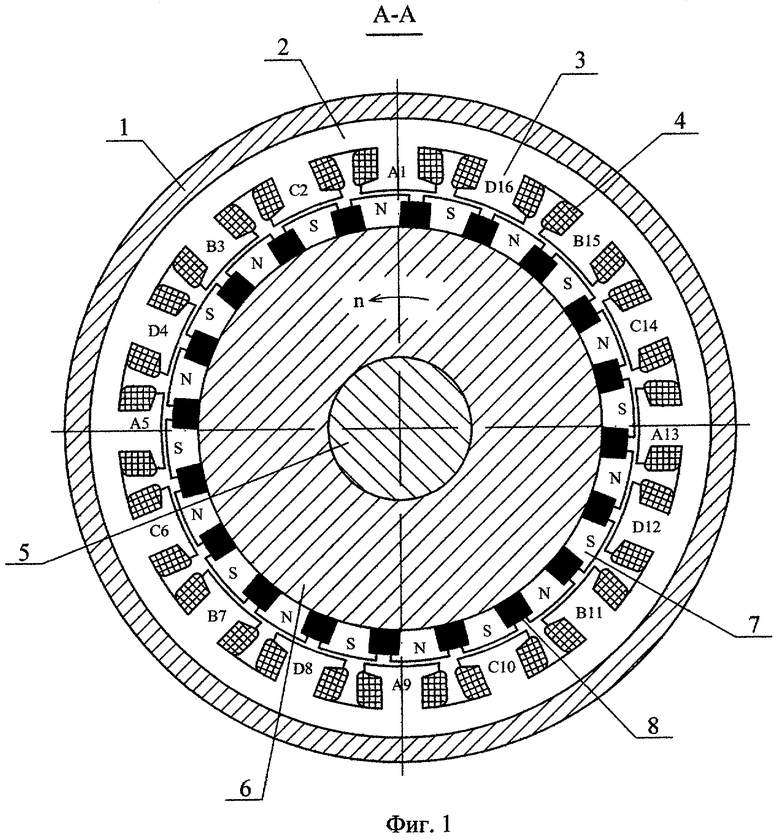
1. Бесконтактная модульная синхронная магнитоэлектрическая машина, состоящая из модулей, число которых с=1, 2, 3, 4, …, и содержащая якорь с m-фазной катушечной обмоткой и индуктор с полюсами, отличающаяся тем, что статор содержит шихтованный сердечник якоря с явно выраженными полюсами, катушечную m-фазную обмотку якоря, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря по одной на полюсе, ротор содержит индуктор с симметрично распределенными по цилиндрической поверхности явно выраженными полюсами, создающими магнитный поток возбуждения при помощи постоянных магнитов и образующими в рабочем воздушном зазоре чередующуюся полярность «N-S» магнитных полюсов, активная часть индуктора насажена на немагнитную втулку, число явно выраженных полюсов якоря Z1P, число фаз m-фазной обмотки якоря m=3, 4, 5, 6, …, число явно выраженных полюсов в фазе модуля якоря Z1c, число модулей c и число явно выраженных полюсов индуктора Z2P связаны равенствами (1) и (2):


причем при m=3, 5, 7, 9, … число явно выраженных полюсов в фазе модуля якоря Z1c=1, при m=4, 6, 8, 10, … число явно выраженных полюсов в фазе модуля якоря Z1c=2, катушки обмотки в фазе модуля якоря при Z1c=2 соединены между собой согласно в магнитном отношении, соответствующие катушки обмотки фазы якоря разных модулей соединены в магнитном отношении встречно.
2. Бесконтактная модульная синхронная магнитоэлектрическая машина по п.1, отличающаяся тем, что якорь расположен снаружи, индуктор - внутри.
3. Бесконтактная модульная синхронная магнитоэлектрическая машина по п.1, отличающаяся тем, что индуктор расположен снаружи, якорь - внутри.
4. Бесконтактная модульная синхронная магнитоэлектрическая машина по п.2 или 3, отличающаяся тем, что ротор выполнен с когтеобразными полюсами и аксиальным расположением постоянных магнитов.
5. Бесконтактная модульная синхронная магнитоэлектрическая машина по п.2 или 3, отличающаяся тем, что ротор выполнен с радиальным размещением постоянных магнитов, представляющих собой явно выраженные полюса индуктора и прикрепленных к магнитомягкому сердечнику.
6. Бесконтактная модульная синхронная магнитоэлектрическая машина по п.2 или 3, отличающаяся тем, что ротор выполнен с тангенциальным расположением постоянных магнитов (ротор «коллекторного типа»).
7. Бесконтактная модульная синхронная магнитоэлектрическая машина по п.2 или 3, отличающаяся тем, что ротор выполнен мозаичным сборным (типа РОМС).
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2354032C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2009599C1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА МАГНИТОЭЛЕКТРИЧЕСКОГО ТИПА | 1998 |
|
RU2143777C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2190292C2 |
| Кипрегель | 1944 |
|
SU67347A1 |
| US 5117142 А, 26.05.1992 | |||
| Статистический анализатор | 1974 |
|
SU484525A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ СПОСОБНОСТИ САМОСТОЯТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ОГРАНИЧЕННОГО В СВОЕЙ МОБИЛЬНОСТИ ЧЕЛОВЕКА | 2019 |
|
RU2774223C1 |

