и
А
Фиг.2
тельно соединенные между собой полуфазы и составляет с источником переменного напряжения высокой частоты со средней точкой полумостовую схему, каждая катушечная группа якорной обмотки содержит число катушек п-1, а статор состоит из скрепленных между собой двух крайних и одного среднего пакета, у которого на месте зубцов, расположенных катушечными группами, закреплены постоянные магниты 4, намагниченные в аксиальном
направлении с чередованием полярности, при этом на зубцах статора, расположенных между катушечными группами, установлены катушки тахометрической обмотки, а каждая полуфаза датчика углового положения состоит из последовательно соединенных между собой катушек, расположенных в сдвинуть друг от друга на m катушечных групп отверстиях, выполненных в основании зубцов статора с постоянными магнитами. 3 з.п. ф-лы, 3 мл.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2354032C1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |
| Многополюсный синхронный электродвигатель | 2021 |
|
RU2779505C1 |
Изобретение относится к электротехнике, а именно к многополюсным бесконтактным электродвигателям с встроенным датчиком углового положения. Целью изобретения является упрощение конструкции и увеличение крутизны выходного сигнала датчика углового положения электромеханического преобразователя ве(тильного электродвигателя. Реализация поставленной цели достигается тем, что в многополюсном бесконтактном электродвигателе с встроенным датчиком углового положения, содержащем статор, образованный двумя пакетами 1 и 2, ротор с чередующимися по полярности полюсами 5, обмотку датчика углового положения, состоящую из m фаз, каждая из которых содержит две последова(Л С VI О О х| О Јь
Изобретение относится к электротехнике, а точнее к электро-механическим преобразователям вентильных электродвигателей, и может быть использовано как в силовых электроприводах, так и в различных системах ав- тематики.
Целью изобретения является упрощение конструкции и увеличение крутизны вы- ходного сигнала датчика углового положения.
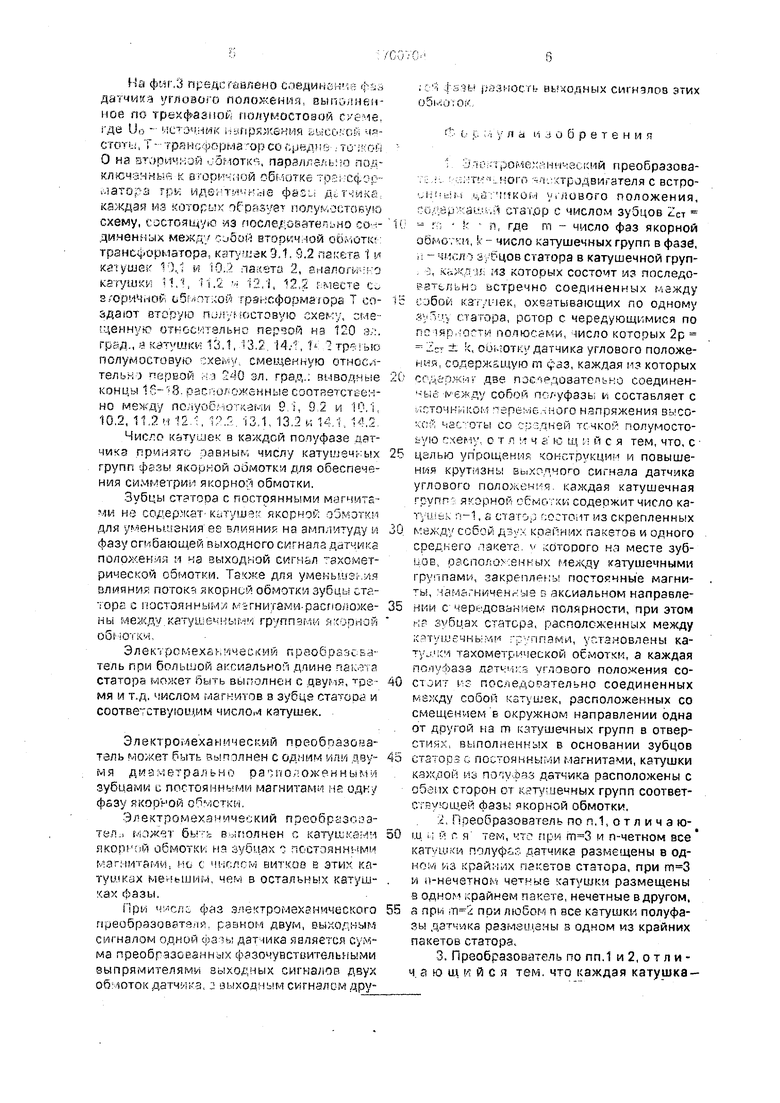
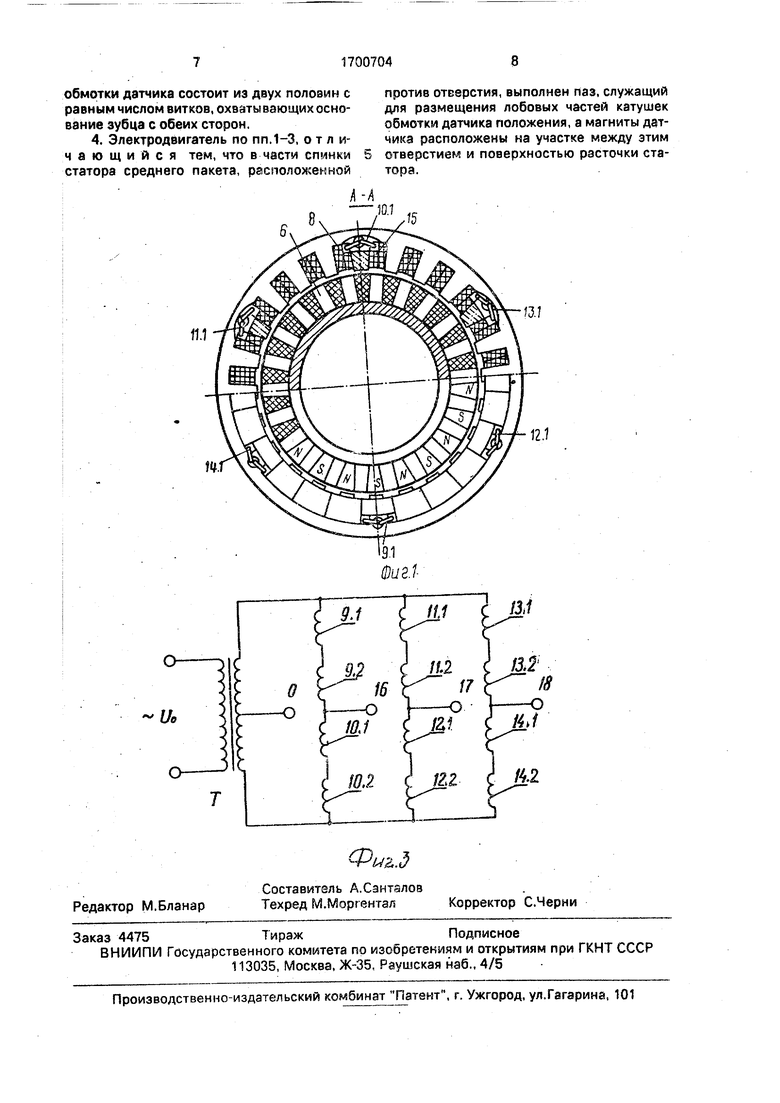
На фиг. 1 изображена конструкция электромеханического преобразователя; на фиг.2 - разрез А-А на фиг.1; на фиг.З - электрическая схема сигнальной части.
Электромеханический преобразова- тель вентильного электродвигателя содержит статор с числом зубцов Zc 24, состоящий из двух крайних пакетов 1 и 2 (фиг.1 и 2) и одного среднего пакета 3, у которого на месте m к 3 -2 6 зубцов (где m - число Фаз, k - число катушечных групп в фазе) установлены постоянные магниты 4, намагниченные в аксиальном направлении с чередованием полярности и имеющие толщину, равную толщине сред- него пакета 3, ротор с чередующимися по полярности полюсами 2 р 22, число которых связано с числом зубцов статора соотношением 2 р Zc ± к 24 -2 22, при этом полюсами ротора являются концентраторы 5, установленные между постоянными магнитами 6, намагниченными в тангенциальном направлении и закрепленные вместе с концентраторами 5 на немагнитном кольце 7, трехфазную якорную обмотку, каждая фа- за которой состоит из катушечных групп, которые соединены между собой последовательно-встречно, так как четное число зубцов в катушечной группе, включая зубцы с постоянными магнитами, а не- четное число, при этом число катушек 8 в каждой катушечной группе равно n-1 4-i 3, так как зубец с постоянным магнитом не
содержит катушку якорной обмотки, а катушки каждой катушечной группы соединены между собой последовательно-встречно, обмотку датчика положения, состоящую из фаз, каждая из которых содержит две последовательно соединенные между собой полуфазы, одна из которых состоит из последовательно соединенных между собой катушек 9.1,,9.2 (фиг.З), расположенных в отверстиях, выполненных в основании зубцов с постоянными магнитами, расположенных друг со смещением друг от друга на катушечных групп в одном крайнем пакете 1 статора, так как нечетное, а четное число, вторая полуфаза состоит из последовательно соединенных между собой катушек 10.1, 10,2, расположенных в пакете 2, аналогично вторая фаза датчика состоит из катушек 11.1, 11.2 и 12.1,12.2, а третья из 13.1, 13.2, 14.1, 14.2, смещенных относительно первой обмотки на 120 и соответственно 240 эл. град, трехфазную тахометрическую обмотку, каждая фаза которой состоит из двух последовательно соединенных обмоток, содержащих по две диаметрально расположенных катушки 15, установленные на зубцах с постоянными магнитами, расположенных с обеих сторон от катушечной группы соответствующей фазы якорной обмотки.
Катушечные группы якорной обмотки электродвигателя при тип нечетных соединяются между собой последовательно-согласно, а при m четном и п любом - последовательно-встречно.
Аналогично катушки каждой полуфазы датчика положения при тип нечетных располагаются поочередно в разных пакетах т.е. нечетные катушки в одном пакпте, ъ. четные в другом, а при m четное и п любом все катушки полуфазы датчика размещены в одном пакете статора.
На фмг.З преде гэйлено соединение фаз датчика углового положения, выполненное по трехфазной полумостоаой схеме, где Uо - источник напряжения аысокой частоты, Т -трянсформа Ор со средне-.: точкой. О на зтаричной обмотка, параллельяо подключенные к вторичной обмотке трансформатора три иден тм -. ные фазы датчика, каждая из которых of рйзуш полумостовую схему, состоящую -АЗ последовательно соединенных между собой вторичной обмотка- трансформатора, кзгушзкЗ.1. 9,2 пакета 1 и
катушек
и 10,2 пакета 2, аналогично
10
i f. месте со
катушки 11,1, 11,2 w 1: зю ричной обмптлой трансформатора Т создают вторую полумостовую схему, смещенную относительна пер зой из 120 эл. град,, а катушки 13,1,13.. И,- 5, .2 третью полумостовую схему, смещенную относительна первой на 240 зл град.: выводные концы 16-18. расположенные соответственно между полуобмоткзмм
9,2 и 10.
Число катушек в каждой полуфазе датчика принято равным числу катушечных групп фазы якорной обмотки для обеспечения симметрии якорной обмотки,
Зубцы статора с постоянными магнитами не содержат-катушег; якорной обмотки для уменьшения ее влияния на амплитуду и фазу огибающей выходного сигнала датчика положения м на выходной сигнал тахомет- рической обмотки. Также для уменьшения влияния потока якорной обмотки зубцы статора с постоянными м -гн /ггами-расположе- иы между.катушечным группами якорной обнотки.
Электромеханический преобразователь при большой аксиальной длине пакета статорв может быть выполнен с двумя, тремя и т.д. числом магнитов в зубце статора и соответствующим числом катушек. .
Электромеханический преобразователь может быть выполнен с одним или дву- мя диаметрально расположенными зубцами с постоянными магнитами на одну фазу якор ной обметки.
Электромеханический преобразоса- тели мажет быть выполнен с катушками якорной обмотки на зубцах постоянными магнитами, но с числом витков в этих катушках меньшим, в остальных катушках фазы.
При . фаз электромеханического преобразователя, разном двум, выходным сигналом одной фазы датчика является сумма преобразованных фрзочувстоительными выпрямителями выходных сигналов двух обмоток датчика, ; выходным сигналом дру;c- i фгззы разность выходных сигналов этих обмоток.
гь ,
--- U J.1
у л а изобретения
1 Электромеханический преобразова- 7Ј,ь :4; ;T LHoro чпсктродвигателя с встро- uHi tsN цйтчмком углового положения, сод8р:л:ац..-1Й статор с числом зубцов ZCT
- rn k п, где m - число фаз якорной обмотки, k - число катушечных групп в фазе, п - число зубцов статора в катушечной груп- :.з, кажд-.ь ; из которых состоит из последовательно встречно соединенных между
собой катушек, охватывающих по одному зуГщу статора, ротор с чередующимися по пс;1яр;- ост .полюсами, число которых 2р 2ст ± k, obf-ютку датчика углового положения, содержащую m фаз, каждая из которых
содержи г две последовательно соединенные между собой полуфазы и составляет с источником переменного напряжения высокой частоты со средней течкой пояумосто- вую схему, о т л и ч а ю щ м и с я тем, что, с
целью упрощения конструкции и повышения крутизны выходного сигнала датчика углового положения, каждая катушечная групп:- якорной обмотки содержит число катушек п-1, в статор состоит из скрепленных
между собой дзух крайних пакетов и одного . среднего пакета, у которого на месте зубцов, расположенных между катушечными группами, закреплены постоянные магниты, намагниченные в аксиальном направленим С чередованием полярности, при этом на зубцах статора, расположенных между катушечными группами, установлены кату и. к и тахометрической обмотки, а каждая полуфаза датчика углового положения состоит из последовательно соединенных между собой катушек, расположенных со смещением в окружном направлении одна от другой на m катушечных групп в отверстиях, вьтолненных в основании зубцов
статора с постоянными магнитами, катушки каждой из потуфзз датчика расположены с обеих сторон от катушечных групп соответствующей фазы якорной обмотки,
катушки полуфаЗ датчика размещены в одном из крайних пакетов статора, при и о-нечетном четные катушки размещены в одном файнем пакете, нечетные в другом, а при при любом п все катушки полуфа- зы датчика размещены в одном из крайних пакетов статора,
обмотки датчика состоит из двух половин с равным числом витков, охватывающих основание зубца с обеих сторон.
против отверстия, выполнен паз, служащий для размещения лобовых частей катушек обмотки датчика положения, а магниты датчика расположены на участке между этим отверстием и поверхностью расточки статора.
| Вентильный электродвигатель | 1981 |
|
SU1053231A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
